








专利摘要
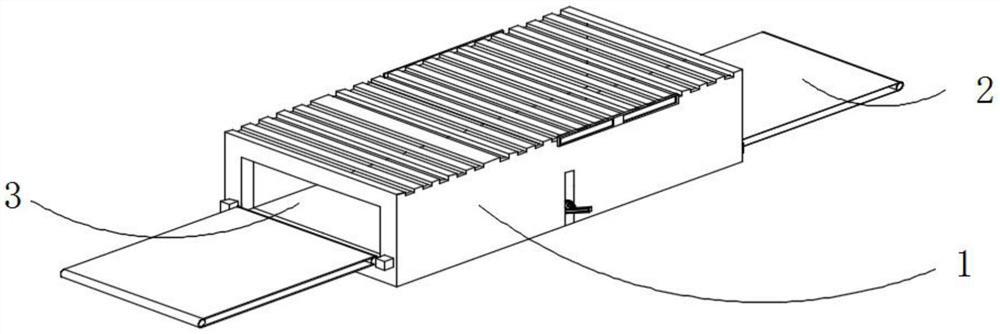
一种57mm人影高炮系统,涉及自动控制领域。该系统的火炮控制器(1)连接击发器(2)、射角显示器(3)、高低电机(4)、方位电机(5)、高低角位移传感器(6)和方位角位移传感器(7),火炮控制器(1)和作业控制终端(8)连接,作业控制终端(8)与远程指挥中心(9)连接。远程指挥中心与作业控制终端进行远程通信,发出指令信息,作业控制终端收到指令信息后,火炮控制器1根据作业控制终端给出的控制指令,给出信号控制击发器和射角显示器。火炮控制器安装在数字化人影高炮内。该57mm高炮系统安全性高,事故发生频率低;系统控制方法简单,作业效率高;能采用多种控制模式对人影作业进行控制,适用范围广泛。
权利要求
1.一种57mm人影高炮系统,其特征在于:该系统的火炮控制器(1)连接击发器(2)、射角显示器(3)、高低电机(4)、方位电机(5)、高低角位移传感器(6)和方位角位移传感器(7),火炮控制器(1)和作业控制终端(8)连接,作业控制终端(8)与远程指挥中心(9)连接。
2.根据权利要求1所述的一种57mm人影高炮系统,其特征在于:火炮控制器(1)采用两个MCU分别控制方位和射角,其中控制方位的MCU为主CPU,击发器的状态通过I/O输入主MCU进行处理,主MCU控制击发准备信号和即刻击发信号,两个MCU通过SPI口输出电平到点击调速口进行调速,从MCU负责高低限位的信息处理,两个CPU通过各自的串口适配器与作业控制终端对话,采集作业控制终端发出的指令,并且把火炮的相关信息回答给作业控制终端,电源管理方面采用多级电源管理模式,把市电220V变换成为29V直流电源并且供给击发器和射角显示器等需要29V电压供电的模块,火炮控制器需要的5V电源通过另一个电源模块由29V转换而来。
3.根据权利要求1所述的一种57mm人影高炮系统,其特征在于:击发器(2)具有多级操作的流程,还有指示灯的指示,29V供电电平隔离开关电源降压后供出,手动击发装置控制15V的电压,手动击发准备电压控制15V开关电源的通断,当手动击发准备按键按下或者远程击发准备信号到来时电压经过隔离驱动到达状态指示灯端,状态指示灯亮,地面受到状态指示灯亮的反馈信息后视情况给予手动或电控击发允许信号,这时通路打开,即可击发。
4.根据权利要求1所述的一种57mm人影高炮系统,其特征在于:射角显示器(3)的主芯片是一片MCU,显示端是两套多位数码管分别显示方位的实际角度和高低的实际角度,MCU通过串口适配器采集高低角度传感器和方位角度传感器的数据传给MCU,MCU驱动高低显示驱动器和方位显示驱动器驱动 两个多位数码管,把数据解析后转换为数码管的编码值传给数码管进行显示,射角显示器(3)的所有元器件、数码管和电路板均采用工业级标准以保证安全性。
5.根据权利要求1所述的一种57mm人影高炮系统,其特征在于:高低电机(4)和方位电机(5)主要包含开关磁阻电机和电机控制器,电机控制器的控制信号有三条,正传、反转和调速,用电压信号来控制相应的通路,电机控制器的供电电压是市电220V,控制电压是5V用于调速,由电机控制器给出。
6.根据权利要求1所述的一种57mm人影高炮系统,其特征在于:高低角位移传感器(6)和方位角位移传感器(7)采用无接触式,无电刷和滑环的滑动接触式设计。
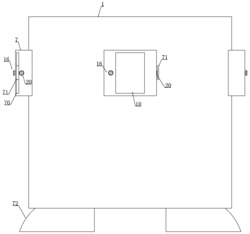
7.根据权利要求1所述的一种57mm人影高炮系统,其特征在于:作业控制终端(8)由作业控制终端箱体、作业控制终端主机、作业控制终端连接面板组成,作业控制终端主机和作业控制终端连接面板装置在作业控制终端箱体内,作业控制终端主机位于作业控制终端箱体左侧,作业控制终端连接面板固定在作业控制终端箱体右侧,作业控制终端主机主要包括操作部分、显示部分、连接接口,操作部分共23个按键包括:0-9数字键;左、右键;开关、调炮、装定等功能键,显示部分采用240×128液晶显示模块,显示数字人影高炮返回的数据信息,主机通过连接接口与面板相连接,用来进行供电和进行数据交互,作业控制终端连接面板主要包括串口、天线、火炮连接航插插座、准备完毕指示灯、击发按键和急停按键,该作业控制终端能够在远程指挥自动模式、现场电控自动模式、手动调炮和击发模式等三种模式下完成对数字人影高炮的控制。
说明书
技术领域
本实用新型涉及一种57mm人影高炮系统,适用于人影作业技术、自动控制等领域。
背景技术
当前我国人影作业的主力装备为37mm高炮,在我国人影作业中延用了数十年,发挥了巨大的作用,防雹效果尤其显著。但是37mm高炮为部队退役装备,炮况较差且缺乏日常维护检修,存在极大的安全隐患,37mm人影弹多为报废炮弹改造,安全性和可靠性低。长期以来,37高人影装备的事故频发,对作业现场和地面的人员及财产造成了很大的威胁。另外,37高射高较低(3000m),催化剂装载量有限(1g),限制了人影作业效果,往往需要部署大量的火炮并耗费大量的炮弹,作业效能无法进一步提高。因此,在当前的37mm高炮系统技术上已很难有安全性和作业效能的提升空间。
而目前随着新型防空武器的陆续装备,有多达5000门的57mm高炮面临退役,这一情况,给我国人工影响天气装备研制人员带来了新的希望,通过改造这些退役装备,研制57mm人影高炮系统,可全面提升我国人影高炮装备的技术水平,57mm高炮有下列优势:安全性高,高炮采用远程、现场电控调炮和击发控制,实现了人炮分离操控;防雹增雨弹对引信进行冗余设计,设计综合失效率≯1/10000,大大降低了瞎火概率;破片重量低于10g/片,大大降低了破片对地面的威胁;高射高大,最高可达8000m,覆盖了人影作业所需的云层高度区间,覆盖范围大,可大大减少装备的部署数量,以便于管理;爆轰范围大,催化剂携带能力强,可装10g以上的AgI催化剂,使防雹效果更为显著;引信采用电子时间引信,可根据云层高度装定起爆时间,实现精准作业,作用效能更高。为此,57mm高炮将在未来的人影作业中有广阔的应用空间。
实用新型内容
本实用新型所要解决的技术问题是提供一种安全性高、作业效率高的一种57mm人影高炮系统。
本实用新型的技术方案:
一种57mm人影高炮系统,该系统包括:火炮控制器、击发器、射角显示器、作业控制终端、远程指挥中心。火炮控制器连接击发器、射角显示器、高低电机、方位电机、高低角位移传感器、方位角位移传感器,火炮控制器和作业控制终端连接,作业控制终端与远程指挥中心连接。
火炮控制器采用两个MCU分别控制方位和射角,其中控制方位的MCU为主CPU。击发器的状态通过I/O输入主MCU进行处理,主MCU控制击发准备信号和即刻击发信号,两个MCU通过SPI口输出电平到点击调速口进行调速。从MCU负责高低限位的信息处理。两个CPU通过各自的串口适配器与作业控制终端对话,采集作业控制终端发出的指令,并且把火炮的相关信息回答给作业控制终端。电源管理方面采用多级电源管理模式,把市电220V变换成为29V直流电源并且供给击发器和射角显示器等需要29V电压供电的模块,火炮控制器需要的5V电源通过另一个电源模块由29V转换而来。
击发器的设计紧紧依赖于火炮上的击发装置,并且具有多级操作的流程,还有指示灯的指示以保证安全性。29V供电电平隔离开关电源降压后供出,手动击发装置控制15V的电压,手动击发准备电压控制15V开关电源的通断,当手动击发准备按键按下或者远程击发准备信号到来时电压经过隔离驱动到达状态指示灯端,状态指示灯亮。地面受到状态指示灯亮的反馈信息后视情况给予手动或电控击发允许信号。这时通路打开,即可击发。
射角显示器的主芯片是一片MCU,显示端是两套多位数码管分别显示方位的实际角度和高低的实际角度,MCU通过串口适配器采集高低角度传感器和方位角度传感器的数据传给MCU,MCU驱动高低显示驱动器和方位显示驱动器驱动两个多位数码管,把数据解析后转换为数码管的编码值传给数码管进行显示,射角显示器的所有元器件、数码管和电路板均采用工业级标准以保证安全性。
高低电机和方位电机主要包含开关磁阻电机和电机控制器,电机控制器的控制信号有三条,正传、反转和调速,用电压信号来控制相应的通路,电机控制器的供电电压是市电220V。控制电压是5V用于调速,由电机控制器给出。
高低角位移传感器和方位角位移传感器采用无接触式,无电刷和滑环的滑动接触式设计,用于角度、位置检测。
作业控制终端由作业控制终端箱体、作业控制终端主机、作业控制终端连接面板组成。作业控制终端主机和作业控制终端连接面板装置在作业控制终端箱体内,作业控制终端主机位于作业控制终端箱体左侧,作业控制终端连接面板固定在作业控制终端箱体右侧。作业控制终端主机主要包括操作部分、显示部分、连接接口。操作部分共23个按键包括:0-9数字键;左、右键;开关、调炮、装定等功能键。显示部分采用240×128液晶显示模块,显示数字人影高炮返回的数据信息。主机通过连接接口与面板相连接,用来进行供电和进行数据交互。作业控制终端连接面板主要包括串口、天线、火炮连接航插插座、准备完毕指示灯、击发按键和急停按键。该作业控制终端能够在远程指挥自动模式、现场电控自动模式、手动调炮和击发模式等三种模式下完成对数字人影高炮的控制。
远程指挥中心与作业控制终端进行远程通信,发出指令信息,作业控制终端收到指令信息后,火炮控制器根据作业控制终端给出的控制指令,给出信号控制击发器和射角显示器。
本实用新型的有益效果:
本实用新型提出的一种57mm人影高炮系统,安全性高,事故发生频率低;人影作业控制方法简单,作业效率高;能采用多种控制模式对人影作业进行控制,适用范围广泛。
附图说明
图1一种57mm人影高炮系统示意图。
具体实施方式
下面结合附图对本发明作进一步描述。
一种57mm人影高炮系统,如图1所示。该系统的火炮控制器1连接击发器2、射角显示器3、高低电机4、方位电机5、高低角位移传感器6和方位角位移传感器7,火炮控制器1和作业控制终端8连接,作业控制终端8与远程指挥中心9连接。
火炮控制器1采用两个MCU分别控制方位和射角,其中控制方位的MCU为主CPU。击发器的状态通过I/O输入主MCU进行处理,主MCU控制击发准备信号和即刻击发信号,两个MCU通过SPI口输出电平到点击调速口进行调速。从MCU负责高低限位的信息处理。两个CPU通过各自的串口适配器与作业控制终端对话,采集作业控制终端发出的指令,并且把火炮的相关信息回答给作业控制终端。电源管理方面采用多级电源管理模式,把市电220V变换成为29V直流电源并且供给击发器和射角显示器等需要29V电压供电的模块,火炮控制器需要的5V电源通过另一个电源模块由29V转换而来。
击发器2的设计紧紧依赖于火炮上的击发装置,并且具有多级操作的流程,还有指示灯的指示以保证安全性。29V供电电平隔离开关电源降压后供出,手动击发装置控制15V的电压,手动击发准备电压控制15V开关电源的通断,当手动击发准备按键按下或者远程击发准备信号到来时电压经过隔离驱动到达状态指示灯端,状态指示灯亮。地面受到状态指示灯亮的反馈信息后视情况给予手动或电控击发允许信号。这时通路打开,即可击发。
射角显示器3的主芯片是一片MCU,显示端是两套多位数码管分别显示方位的实际角度和高低的实际角度,MCU通过串口适配器采集高低角度传感器和方位角度传感器的数据传给MCU,MCU驱动高低显示驱动器和方位显示驱动器驱动两个多位数码管,把数据解析后转换为数码管的编码值传给数码管进行显示,射角显示器的所有元器件、数码管和电路板均采用工业级标准以保证安 全性。
高低电机4和方位电机5主要包含开关磁阻电机和电机控制器,电机控制器的控制信号有三条,正传、反转和调速,用电压信号来控制相应的通路,电机控制器的供电电压是市电220V。控制电压是5V用于调速,由电机控制器给出。
高低角位移传感器6和方位角位移传感器7采用无接触式,无电刷和滑环的滑动接触式设计,用于角度、位置检测。
作业控制终端8由作业控制终端箱体、作业控制终端主机、作业控制终端连接面板组成。作业控制终端主机和作业控制终端连接面板装置在作业控制终端箱体内,作业控制终端主机位于作业控制终端箱体左侧,作业控制终端连接面板固定在作业控制终端箱体右侧。作业控制终端主机主要包括操作部分、显示部分、连接接口。操作部分共23个按键包括:0-9数字键;左、右键;开关、调炮、装定等功能键。显示部分采用240×128液晶显示模块,显示数字人影高炮返回的数据信息。主机通过连接接口与面板相连接,用来进行供电和进行数据交互。作业控制终端连接面板主要包括串口、天线、火炮连接航插插座、准备完毕指示灯、击发按键和急停按键。该作业控制终端能够在远程指挥自动模式、现场电控自动模式、手动调炮和击发模式等三种模式下完成对数字人影高炮的控制。
远程指挥中心9与作业控制终端8进行远程通信,发出指令信息,作业控制终端8收到指令信息后,火炮控制器1根据作业控制终端8给出的控制指令,给出信号控制击发器2和射角显示器3。火炮控制器1安装在数字化人影高炮内。
一种57mm人影高炮系统有三种控制方式完成对数字化人影高炮的控制。
现场电控自动模式按以下步骤执行:
步骤一远程指挥中心9通过解算将调炮和引信装定信息告知作业人员;
步骤二作业人员利用作业控制终端8下达控制指令;
步骤三数字化人影高炮接受指令后,自动转动高低角和方位角到指令角度对准指定空域,用装定器装定延时时间;
步骤五远程指挥中心9通过解算下达发射指令,作业人员接到发射指令后,作业人员采用电击发装置执行发射;
步骤六完成击发。
远程指挥自动模式按以下步骤执行:
步骤一远程指挥中心9通过解算,向作业控制终端8发出远程调炮指令,和引信装定时间;
步骤二作业控制终端8对火炮控制器1发出调炮控制指令,数字化人影高炮接受指令后,自动转动高低角和方位角到指令角度对准指定空域,炮手用装定器装定延时时间;
步骤三信号控制过程中的信息反馈到远程指挥中心9;
步骤四发射准备就绪后,可由远程指挥中心9或作业人员采用电击发装置执行电控发射;
步骤五完成击发。
手动调炮和击发模式按以下步骤执行:
步骤一数字化人影高炮手动调炮瞄准目标;
步骤二用装定器装定延时时间,发射准备完成后告知远程指挥中心9;
步骤三远程指挥中心9下达发射指令,作业人员将拉火绳与人工发射杆连接后撤离火炮,作业人员通过拉火绳经机械发射装置发射;
步骤四完成击发。
本实用新型所用器件均为市场零售。
一种57mm人影高炮系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0