








专利摘要
本实用新型涉及一种油田管杆的测量装置,属油田测量检测设备技术领域。该油田管杆的测量装置,包括水池、限位器、驱动器、测量环、红外开关、超声波测量探头、工业计时器和PLC中央处理单元;水池中安装有驱动器;驱动器一侧装有测量环;测量环的内部呈发散状安装有多个超声波测量探头;超声波测量探头一侧的测量环上装有红外开关;红外开关通过工业计时器与PLC中央处理单元相连接;所述的驱动器一侧与测量环之间装有限位器。该油田管杆的测量装置,结构紧凑、设计巧妙,解决了有油田管杆测量方式存有的工作效率低和误差大的问题;满足了油田管杆测量检测的需要。
权利要求
1.一种油田管杆的测量装置,包括水池(1)、限位器(2)、驱动器(3)、测量环(4)、红外开关(5)、超声波测量探头(6)、工业计时器和PLC中央处理单元;其特征在于:水池(1)中安装有驱动器(3);驱动器(3)一侧装有测量环(4);测量环(4)的内部呈发散状安装有多个超声波测量探头(6);超声波测量探头(6)一侧的测量环(4)上装有红外开关(5);红外开关(5)通过工业计时器与PLC中央处理单元相连接;超声波测量探头(6)与PLC中央处理单元相连接;所述的驱动器(3)一侧与测量环(4)之间装有限位器(2);驱动器(3)另一侧的水池(1)中安装有限位器(2);测量环(4)另一侧的水池(1)中安装有多个限位器(2);限位器(2)、测量环(4)和驱动器(3)之间呈同心设置。
2.根据权利要求1所述的一种油田管杆的测量装置,其特征在于:所述的驱动器(3)包括主动轮(7)、从动轮(8)、驱动电机(20)、传动链(21)和安装架(9);水池(1)中通过转轴A(11)安装有主动轮(7);转轴A(11)的一端延伸至水池(1)外部后装有传动齿轮(22);水池(1)外部装有驱动电机(20);驱动电机(20)通过传动链(21)与传动齿轮(22)相连接;主动轮(7)上方的水池(1)中固装有安装架(9);安装架(9)上通过调节滑孔(10)和活动轴承座(14)活动装有转轴B(12);转轴B(12)上固装有从动轮(8);活动轴承座(14)上方的调节滑孔(10)内装有缓冲弹簧(13)。
3.根据权利要求2所述的一种油田管杆的测量装置,其特征在于:所述的主动轮(7)的圆周面上和从动轮(8)的圆周面上均设置有挤压环槽(15);挤压环槽(15)内部设置有抗滑垫层。
4.根据权利要求1所述的一种油田管杆的测量装置,其特征在于:所述的限位器(2)包括支撑环(16)、限位辊(17)和支撑板(18);水池(1)内固装有支撑环(16);支撑环(16)内通过支撑板(18)呈圆环状安装有多个限位辊(17);所述的限位辊(17)的圆周面呈“沙漏形”结构。
5.根据权利要求4所述的一种油田管杆的测量装置,其特征在于:所述的限位辊(17)两侧的支撑板(18)上设置有引导滑孔;限位辊(17)的两端端头装有活动轴承座(14);活动轴承座(14)与引导滑孔滑动连接;活动轴承座(14)与引导滑孔之间设置有缓冲弹簧(13);在缓冲弹簧(13)弹力的作用下,限位辊(17)具有向支撑环(16)中心靠拢的趋势。
说明书
技术领域
本实用新型涉及一种油田管杆的测量装置,属油田测量检测设备技术领域。
背景技术
在石油勘探领域,油田管杆在入井前需要对其长度、内径等尺寸进行测量,以将不合格的油田管杆剔除,以保证管杆入井的顺利进行。传统的油田管杆是采用卷尺测量其长度,利用蒸汽驱动圆形通规的方式检测油田管杆内径是否合格。采用传统方式不仅存有工作效率低的问题还存有误差大的问题。不能满足油田管杆快速测量检测的需要,目前市场上存有利用激光测距仪完成油田管杆长度的设备,如申请公告号为CN110146042A的发明专利申请公开的一种长度测量系统,其虽然在一定程度上提高了油田管杆的长度测量效率但是其依然不能完成油田管杆管径的测量,依然只能采用传统的方式完成油田管杆管径的检测工作其依然存有检测误差大的问题。由此有必要研发一种新的测量装置使其既能完成油田管杆长度的测量也能满足其管径的测量,以解决现有测量方式存有的上述问题。
发明内容
本实用新型的目的在于:提供一种结构紧凑、设计巧妙,以解决现有油田管杆测量方式存有的工作效率低和误差大问题的油田管杆的测量装置。
本实用新型的技术方案是:
一种油田管杆的测量装置,包括水池、限位器、驱动器、测量环、红外开关、超声波测量探头、工业计时器和PLC中央处理单元;其特征在于:水池中安装有驱动器;驱动器一侧装有测量环;测量环的内部呈发散状安装有多个超声波测量探头;超声波测量探头一侧的测量环上装有红外开关;红外开关通过工业计时器与PLC中央处理单元相连接;超声波测量探头与PLC中央处理单元相连接;所述的驱动器一侧与测量环之间装有限位器;驱动器另一侧的水池中安装有限位器;测量环另一侧的水池中安装有多个限位器;限位器、测量环和驱动器之间呈同心设置。
所述的驱动器包括主动轮、从动轮、驱动电机、传动链和安装架;水池中通过转轴A安装有主动轮;转轴A的一端延伸至水池外部后装有传动齿轮;水池外部装有驱动电机;驱动电机通过传动链与传动齿轮相连接;主动轮上方的水池中固装有安装架;安装架上通过调节滑孔和活动轴承座活动装有转轴B;转轴B上固装有从动轮;活动轴承座上方的调节滑孔内装有缓冲弹簧。
所述的主动轮的圆周面上和从动轮的圆周面上均设置有挤压环槽;挤压环槽内部设置有抗滑垫层。
所述的限位器包括支撑环、限位辊和支撑板;水池内固装有支撑环;支撑环内通过支撑板呈圆环状安装有多个限位辊;所述的限位辊的圆周面呈“沙漏形”结构。
所述的限位辊两侧的支撑板上设置有引导滑孔;限位辊的两端端头装有活动轴承座;活动轴承座与引导滑孔滑动连接;活动轴承座与引导滑孔之间设置有缓冲弹簧;在缓冲弹簧弹力的作用下,限位辊具有向支撑环中心靠拢的趋势。
所述的超声波测量探头为外购设备,其由汕头超声仪器厂生产,其型号为CTS-23A;红外开关为对射式光电开关,其品牌为思科,PLC中央处理单元由德国西门子股份公司生产,其型号为S7-1200CPU214。
本实用新型的优点在于:
该油田管杆的测量装置,结构紧凑、设计巧妙,既能完成油田管杆长度的测量检测,又能完成管径的测量检测,由此解决了有油田管杆测量方式存有的工作效率低和误差大的问题;满足了油田管杆测量检测的需要。
附图说明
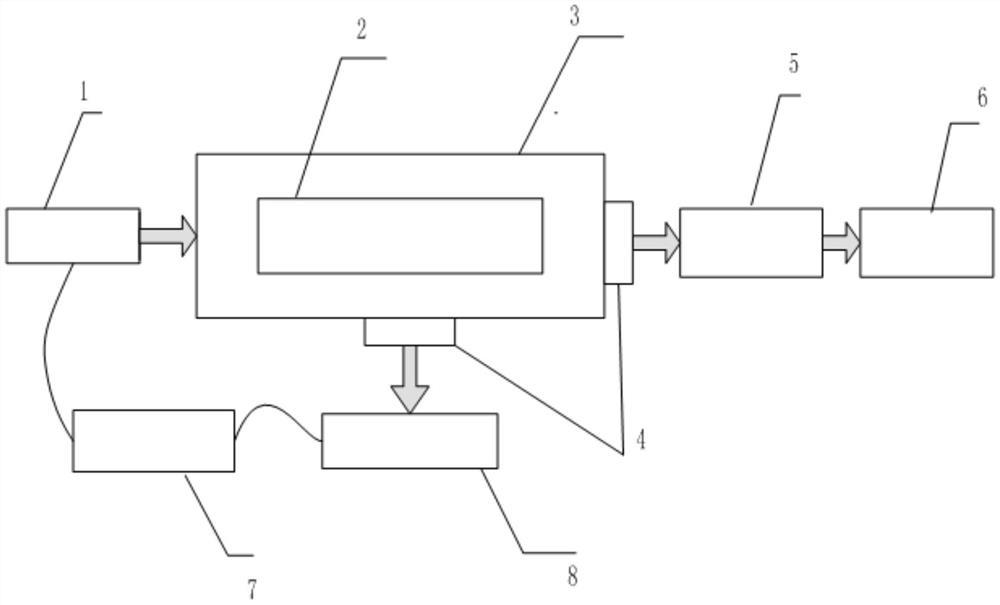
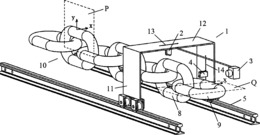
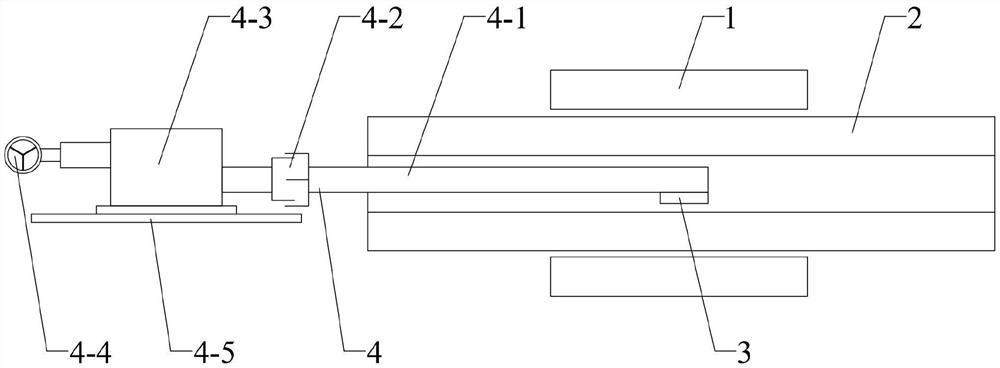
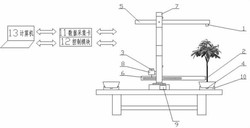
图1为本实用新型的结构示意图;
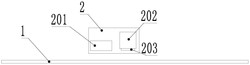
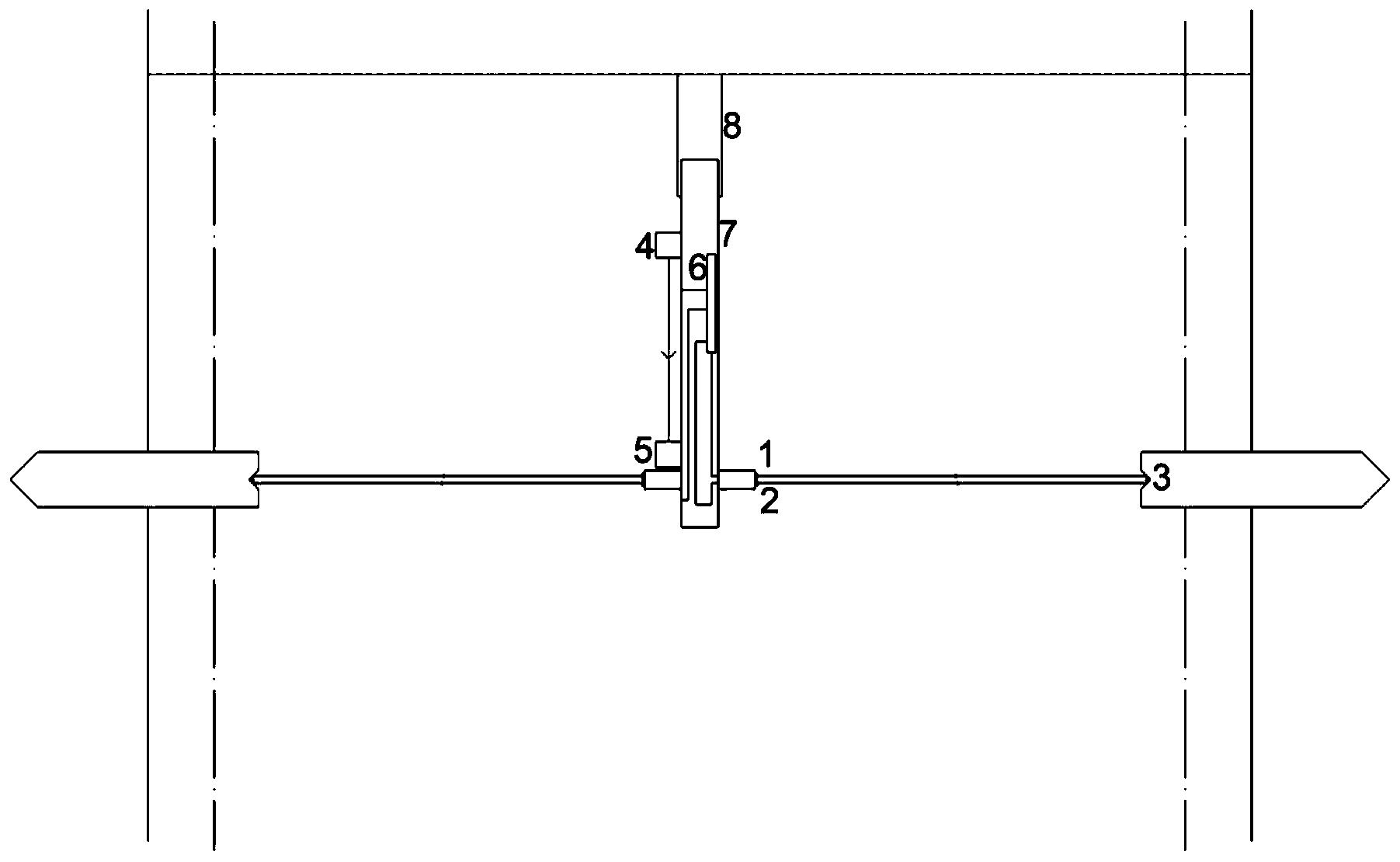
图2为图1的后视结构示意图;
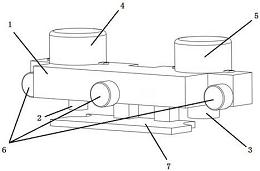
图3为本实用新型的驱动器的结构示意图;
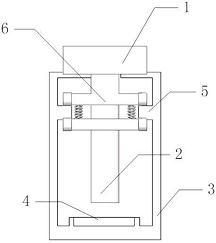
图4为本实用新型限位器的结构示意图;
图5为图4中A处的放大结构示意图;
图6为本实用新型测量环的结构示意图;
图7为图6的左视结构示意图;
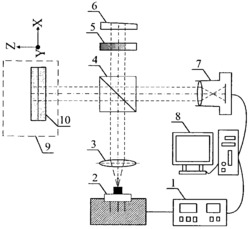
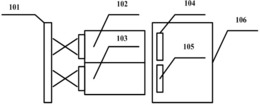
图8为本实用新型超声波探头的工作原理示意图。
图中:1、水池;2、限位器;3、驱动器;4、测量环;5、红外开关;6、超声波测量探头;7、主动轮;8、从动轮;9、安装架;10、调节滑孔;11、转轴A;12、转轴B;13、缓冲弹簧;14、活动轴承座;15、挤压环槽;16、支撑环;17、限位辊;18、支撑板;19、油田管杆;20、驱动电机;21、传动链;22、传动齿轮。
具体实施方式
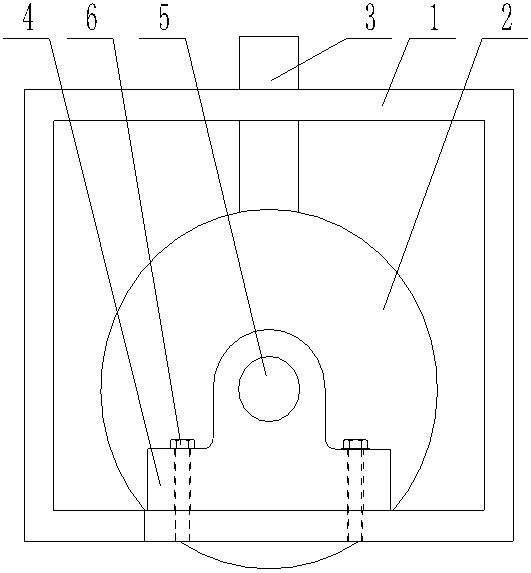
该油田管杆的测量装置,包括水池1、限位器2、驱动器3、测量环4、红外开关5、超声波测量探头6、工业计时器和PLC中央处理单元(参见说明书附图1)。
水池1中安装有驱动器3(参见说明书附图1);驱动器3包括主动轮7、从动轮8、驱动电机20、传动链21和安装架9(参见说明书附图1和3)。
水池1中通过转轴A11安装有主动轮7;转轴A11的一端延伸至水池1外部后装有传动齿轮22;水池1外部装有驱动电机20(参见说明书附图2);驱动电机20通过传动链21与传动齿轮22相连接;驱动电机20工作时,即可通过传动链21、传动齿轮22带动主动轮7同步转动。
主动轮7上方的水池1中固装有安装架9(参见说明书附图1和3);安装架9上通过调节滑孔10和活动轴承座14活动装有转轴B12;转轴B12上固装有从动轮8;活动轴承座14上方的调节滑孔10内装有缓冲弹簧13。如此通过安装架9和缓冲弹簧13安装从动轮8的目的在于:以使工作时,油田管杆19进入到从动轮8和主动轮7之间后,从动轮8能够在缓冲弹簧13弹力的作用下,始终使油田管杆19带有一定压力与主动轮7贴合连接,从而使主动轮7转动的过程中能够在从动轮8的配合下以“双辊挤压输送”的方式,完成油田管杆19的输送工作。
主动轮7的圆周面上和从动轮8的圆周面上均设置有挤压环槽15;挤压环槽15的弧形弧度与油田管杆19圆周面的弧度一致;挤压环槽15内部设置有抗滑垫层(参见说明书附图3)。如此设置挤压环槽15的目的在于:一是使工作时,主动轮7和从动轮8能够通过挤压环槽15与油田管杆19保持贴合连接,从而达到使主动轮7和从动轮8与油田管杆19之间保持足够的接触面积,避免接触面积不够,主动轮7和从动轮8与油田管杆19之间发生“打滑”的问题。二是利用抗滑垫层摩擦系数大的特性,进一步降低主动轮7和从动轮8 “打滑”的风险。
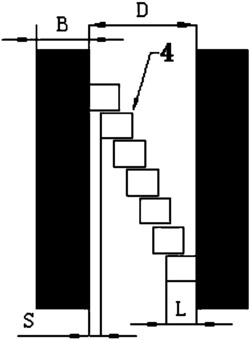
驱动器3一侧装有测量环4(参见说明书附图1);测量环4的内部呈发散状安装有多个超声波测量探头6(参见说明书附图3)。超声波测量探头6为外购设备,其由汕头超声仪器厂生产,其型号为CTS-23A。
超声波测量探头6一侧的测量环4上装有红外开关5;红外开关为对射式光电开关,其品牌为思科。红外开关5通过工业计时器与PLC中央处理单元相连接;超声波测量探头6与PLC中央处理单元相连接;工业计时器为外购设备;PLC中央处理单元由德国西门子股份公司生产,其型号为S7-1200CPU214。
工作时,红外开关5检测到油田管杆19会给与工业计时器一个信号;红外开关5检测到油田管杆19消失时又会给与工业计时器一个信号;工业计时器会根据红外开关5两次信号的间隔时间进行记录,设该时间为t3;设油田管杆19的匀速移动的速度为v3。
此外超声波测量探头6发出的超声波脉冲透过水(耦合剂)达到油田管杆19时,一部分超声波脉冲信号将被油田管杆19的外管壁反射回来;另一部分超声波脉冲信号将被油田管杆19的内管壁反射回来;超声波测量探头6将对两次反射回来的超声波脉冲信号的时间进行记录;设超声波脉冲从发射到接收从油田管杆19的外管壁反射回来的信号时间为t1;设超声波脉冲从发射到接收从内管壁反射回来的信号时间为t2;超声波脉冲在水中的传播速度为v1;超声波脉冲在油田管杆19中的传播速度为v2;设油田管杆19的管壁壁厚为S;油田管杆19的外径为S外;油田管杆19的内径为S内;超声波测量探头6的端头到测量环4中心的距离为S中;油田管杆19的长度为L。
如此油田管杆19 的长度、外径、内径以及壁厚的计算公式如下:
油田管杆19的壁厚S= v2*(t2-t1)/2
油田管杆19的外径S外=S中- v1* t1/2
油田管杆19的内径S内=S外-S
油田管杆19的长度L= v3* t3
在上述计算中,S中的数值可由实际测量得出;v2和v1为已知条件;t1和 t2为超声波测量探头6记录参数;如此将上述公式和计算原理以MATLAB软件在PLC中央处理单元中使用进行编程;当超声波测量探头6将t1和 t2 信号传递给PLC中央处理单元时,PLC中央处理单元即可通过上述程序对油田管杆19的长度、外径、内径以及壁厚进行计算。
由于测量环4的内部设置有多个超声波测量探头6,每个超声波测量探头6给与PLC中央处理单元信号后,PLC中央处理单元均能够在各个方向对油田管杆19的外径、内径以及壁厚进行计算;而后PLC中央处理单元即可通过现有技术对油田管杆19的形态进行仿真对比,如此即可达到测量和检测油田管杆19 的目的。
驱动器3一侧与测量环4之间装有限位器2;驱动器3另一侧的水池1中安装有限位器2;测量环4另一侧的水池1中安装有多个限位器2(参见说明书附图1);限位器2、测量环4和驱动器3之间呈同心设置(参见说明书附图1)。
限位器2包括支撑环16、限位辊17和支撑板18(参见说明书附图4);水池1内固装有支撑环16;支撑环16内通过支撑板18呈圆环状安装有多个限位辊17(参见说明书附图4)。
限位辊17两侧的支撑板18上设置有引导滑孔;限位辊17的两端端头装有活动轴承座14;活动轴承座14与引导滑孔滑动连接;活动轴承座14与引导滑孔之间设置有缓冲弹簧13;在缓冲弹簧13弹力的作用下,限位辊17具有向支撑环16中心靠拢的趋势(参见说明书附图4和5)。如此对限位辊17进行装配的目的在于:以使油田管杆19穿过限位器2的过程中,各个限位辊17能够在缓冲弹簧13的作用下,使其与油田管杆19保持滚动连接,进而保证了油田管杆19能够从限位器2的中心穿过;避免了油田管杆19偏心问题的发生。
限位辊17的圆周面呈“沙漏形”结构(参见说明书附图4)。限位辊17的表面弧度与油田管杆19的表面弧度一致;如此设置后,限位辊17的表面能够与油田管杆19保持贴合连接;从而使限位辊17在缓冲弹簧13弹力的作用下能够为油田管杆19提供足够的支撑。
使用该油田管杆的测量装置对油田管杆进行测量检测的方法如下:
1)、向水池1内中注水,当水池1中的液面淹没从动轮8后即可停止注水;随后开启驱动电机20,使其通过传动链21、传动齿轮22带动主动轮7同步转动,并开启PLC中央处理单元;
2)、将待检测的油田管杆19放入水池1,并将其一端穿过限位器2后插入到主动轮7和从动轮8之间;此时转动的主动轮7在从动轮8的配合下,将以“挤压输送”的方式将油田管杆19以匀速v3的速度向着测量环4输送;使其以v3的速度从测量环4的中心穿过;
3)、在油田管杆19以v3的匀速从中心穿过测量环4的过程中;超声波测量探头6不断的发出的超声波脉冲;发出的超声波脉冲透过水(耦合剂)达到油田管杆19时,一部分超声波脉冲信号将被油田管杆19的外管壁反射回来;另一部分超声波脉冲信号将被油田管杆19的内管壁反射回来;超声波测量探头6将对两次反射回来的超声波脉冲信号的时间进行记录;设超声波脉冲从发射到接收从油田管杆19的外管壁反射回来的信号时间为t1;设超声波脉冲从发射到接收从内管壁反射回来的信号时间为t2;随后超声波测量探头6将t1和t2的信号传递到PLC中央处理单元。
在在油田管杆19以v3的匀速从中心穿过测量环4的过程中;红外开关5检测到油田管杆19会给与工业计时器一个信号;红外开关5检测到油田管杆19消失时又会给与工业计时器一个信号;工业计时器会根据红外开关5两次信号的间隔时间进行记录,设该时间为t3;工业计时器会将该信号传递给PLC中央处理单元;
PLC中央处理单元接收到信号后,其将利用如下公式对油田管杆19的长度、外径、内径以及壁厚的计算公式进行计算。
油田管杆19的壁厚S= v2*(t2-t1)/2
油田管杆19的外径S外=S中- v1* t1/2
油田管杆19的内径S内=S外-S
油田管杆19的长度L= v3* t3
其中v1--超声波脉冲在水中的传播速度;
v2--超声波脉冲在油田管杆19中的传播速度;
v3--油田管杆19的匀速移动的速度;
S中--超声波测量探头6的端头到测量环4中心的距离。
PLC中央处理单元对油田管杆19进行测量后,将会与标准数值进行比对,如果该数值合格则该油田管杆19为合格产品,否则为不合格产品。
当油田管杆19完全穿过测量环4后,随后将油田管杆19从测量环4一侧的限位器2中取出,随后该测量装置即可进入下个工作循环。
该油田管杆的测量装置,结构紧凑、设计巧妙,既能完成油田管杆19长度的测量检测,又能完成管径的测量检测,由此解决了有油田管杆19测量方式存有的工作效率低和误差大的问题;满足了油田管杆19测量检测的需要。
一种油田管杆的测量装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0