








专利摘要
本发明公开了一种嵌入式热流传感器测量误差的修正方法,包括以下步骤:S1、使用热电偶测量得到热流传感器与周围防热材料的表面温度;S2、计算冷点温差系数;S3、根据预测公式计算测量热流当地值与真实热流当地值的比值;S4、基于当地热流比的计算结果,在嵌入式热流传感器的测量表面区域内作面积加权平均,获得平均热流比;S5、根据平均热流比对测量热流值作出修正,得到真实热流值。与现有的技术相比,本发明的嵌入式热流传感器测量误差的修正方法仅需要来流总温、热流传感器表面温度、周围防热材料表面温度与测点位置四个参数,即可对嵌入式热流传感器的测量误差作出修正,需要的参数少且容易获得,因此具有通用性较强、适用范围较广等优点。
权利要求
1.一种嵌入式热流传感器测量误差的修正方法,其特征在于,
包括以下步骤:
S1、使用热电偶测量得到热流传感器与周围防热材料的表面温度;
S2、计算冷点温差系数,计算公式如下:
其中,T
S3、根据预测公式计算测量热流当地值与真实热流当地值的比值κ,飞行攻角大于15°时的迎风面采用如下计算公式:
背风面以及飞行攻角小于15°的迎风面采用如下计算公式:
其中,Q
S4、基于S3中的当地热流比κ计算结果,在嵌入式热流传感器(1)的测量表面区域内作面积加权平均,得到热流传感器测量表面的平均热流比κ
S5、根据S4中计算得到的平均热流比κ
2.如权利要求1所述的嵌入式热流传感器测量误差的修正方法,其特征在于,所述的高超声速飞行器的飞行马赫数小于16。
3.如权利要求1所述的嵌入式热流传感器测量误差的修正方法,其特征在于,所述的高超声速飞行器的飞行高度小于60km。
说明书
技术领域
本发明涉及热流传感器技术领域,尤其涉及一种嵌入式热流传感器测量误差的修正方法。
背景技术
高超声速飞行器在大气层内飞行时其表面承受不同程度的气动加热,其热防护系统是飞行成败的决定性因素。准确把握气动加热的能量传输过程、掌握成熟的热流测量技术是有效开展热防护设计、确保飞行安全的必由之路。
高超声速飞行器热流测量技术可分为两大类,即内置式和嵌入式。内置式通常指使用热电偶等温度仪表直接测量防热层内部温度历程,计算表面热流。嵌入式在防热层内部开孔至表面,插入独立的热流传感器与外流场直接接触,传感器输出温度信号用以求解表面热流,某些设备可直接输出热流信号。早期的高超声速飞行器测热技术通常以内置式技术为主,而随后在更高飞行热载荷的需求推动下,烧蚀防热机制的兴起及各类复合材料的广泛使用,使得气动热与防热结构的换能过程出现热解、烧蚀和剥蚀等诸多复杂因素,于是飞行试验逐步采用嵌入式热流测量技术。然而,由于金属传感器的热沉特性(指器件温度不随接收到的热能的大小变化)导致其温度远低于周围防热材料,嵌入式热流测量技术通常会产生冷点效应。
冷点效应现象包含两个层面:
一、材料学层面,其表现为传感器材料与防热材料热导率不同导致飞行器壁面瞬态热响应存在局部差异,形成温差。具体解释如下:高超声速飞行器外表面采用的是复合型防热材料,这种类型的材料热导率较低,在气动加热情形下,材料内外会形成较大的温度梯度,表面材料温度上升的速度较快、幅度较大。而飞行试验中常采用的同轴型铜—康铜热电偶传感器,其使用的是金属材料,具有导热快、热沉大、温升慢等特点。因此,在遭遇气动加热时,传感器表面和当地防热材料之间会出现较大的温度差。
二、流体力学层面,其表现为局部温度差异将原先的可压缩起始加热问题转变为可压缩非起始加热问题,此时温度边界层构型发生显著变化,热流传感器附近的热流分布受到显著影响,导致传感器测量得到的热流分布与实际值之间存在一定的差异。
发明内容
为了弥补上述嵌入式热流传感器在测量高超声速飞行器表面热流时的固有缺陷,本发明提供了一种嵌入式热流传感器测量误差的修正方法。
一种嵌入式热流传感器测量误差的修正方法,包括以下步骤:
S1、使用热电偶测量得到热流传感器与周围防热材料的表面温度;
S2、计算冷点温差系数;
S3、根据预测公式计算测量热流当地值与真实热流当地值的比值κ;
S4、基于当地热流比κ的计算结果,在嵌入式热流传感器的测量表面区域内作面积加权平均,得到热流传感器测量表面的平均热流比κm;
S5、根据S4中计算得到的平均热流比κm对测量得到的热流值Qhc作出修正,得到真实、有效的热流值Qh。
优选的,所述的嵌入式热流传感器测量误差的修正方法,包括以下步骤:
S1、使用热电偶测量得到热流传感器与周围防热材料的表面温度;
S2、计算冷点温差系数,计算公式如下:
其中,T0为高超声速飞行状态对应的总温,Tc为嵌入式热流传感器的表面温度,Tw为周围防热材料的表面温度;
S3、根据预测公式计算测量热流当地值与真实热流当地值的比值κ,根据飞行攻角的范围采用分段修正策略,在飞行攻角大于15°时的迎风面采用如下计算公式:
背风面以及飞行攻角小于15°的迎风面采用如下计算公式:
其中,Qhc表示防热材料表面温度为Tw,热流传感器表面温度为Tc时的热流值;Qh表示防热材料表面温度为Tw,热流传感器表面温度也为Tw时的热流值;α为飞行攻角;L表示热流传感器前缘到飞行器前缘的距离;x表示当地热流的计算位置到飞行器前缘的距离;
S4、基于S3中的当地热流比κ计算结果,在嵌入式热流传感器的测量表面区域内作面积加权平均,得到热流传感器测量表面的平均热流比κm,具体计算式如下:
S5、根据S4中计算得到的平均热流比κm对测量得到的热流值Qhc作出修正,得到真实、有效的热流值Qh:
所述的高超声速飞行器的飞行马赫数应小于16。
所述的高超声速飞行器的飞行高度应小于60km。
与现有的修正技术相比,本发明具有的优点和积极效果是:
1、所述的测量误差修正方法仅需来流总温T0、热流传感器表面温度Tc、周围防热材料表面温度Tw与测点位置L四个参数即可对嵌入式热流传感器的测量误差作出修正,需要的参数少且容易获得,因此本发明的修正方法通用性较强、适用范围较广;
2、所述的测量误差修正方法采用当地热流比作面积平均的方式获得热流传感器测量面内的平均热流比,对测量面的形状无要求,因此本发明的修正方法可适用于各种测量面形状的嵌入式热流传感器;
3、所述的测量误差修正方法可根据飞行攻角采用分段修正,大幅提高飞行攻角大于15°时迎风面热流实时修正的速度。
附图说明
图1是嵌入式热流传感器测量误差产生原因的说明图;
图2是嵌入式热流传感器测量时真实表面热流的数值模拟计算结果;
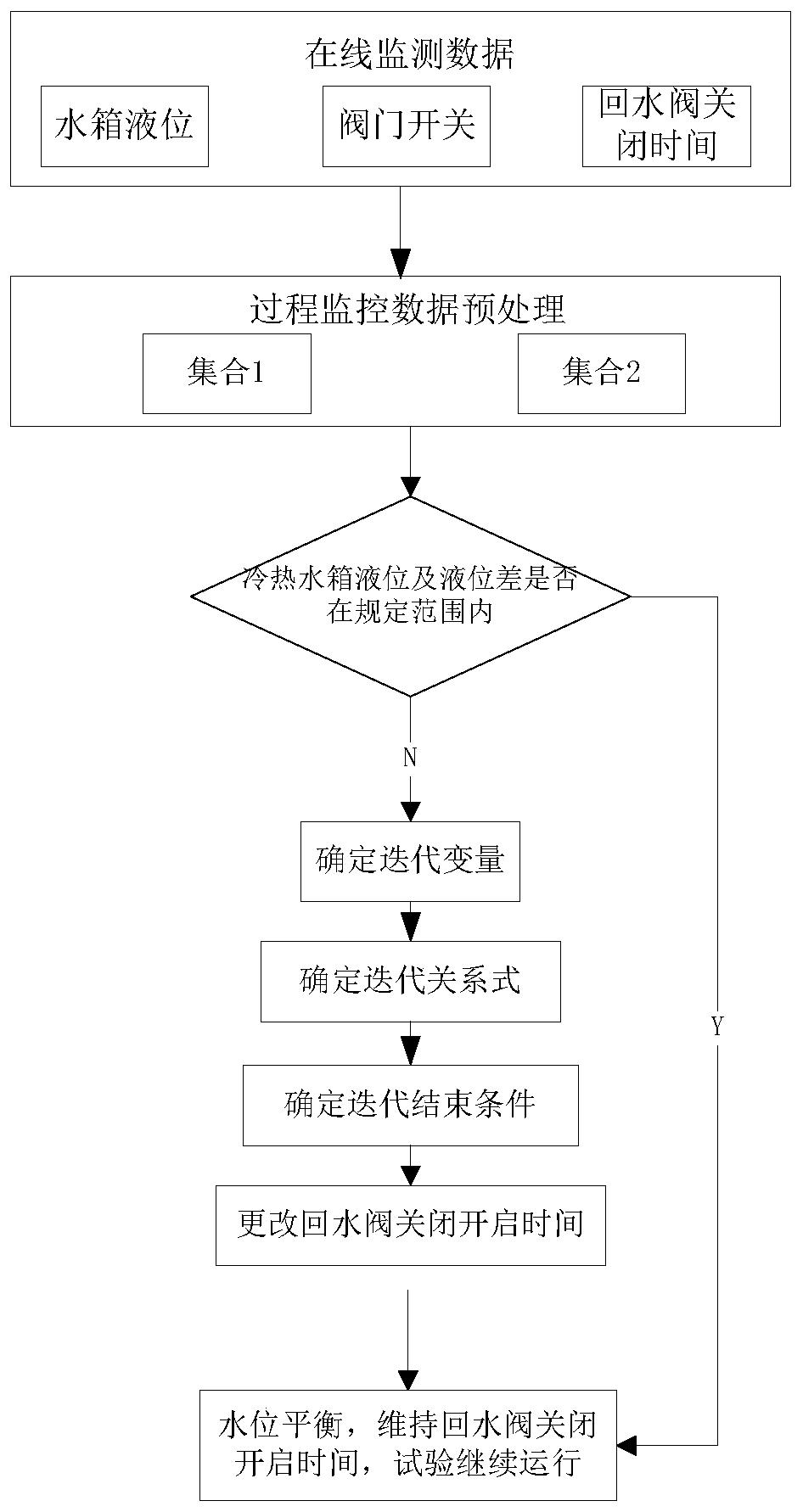
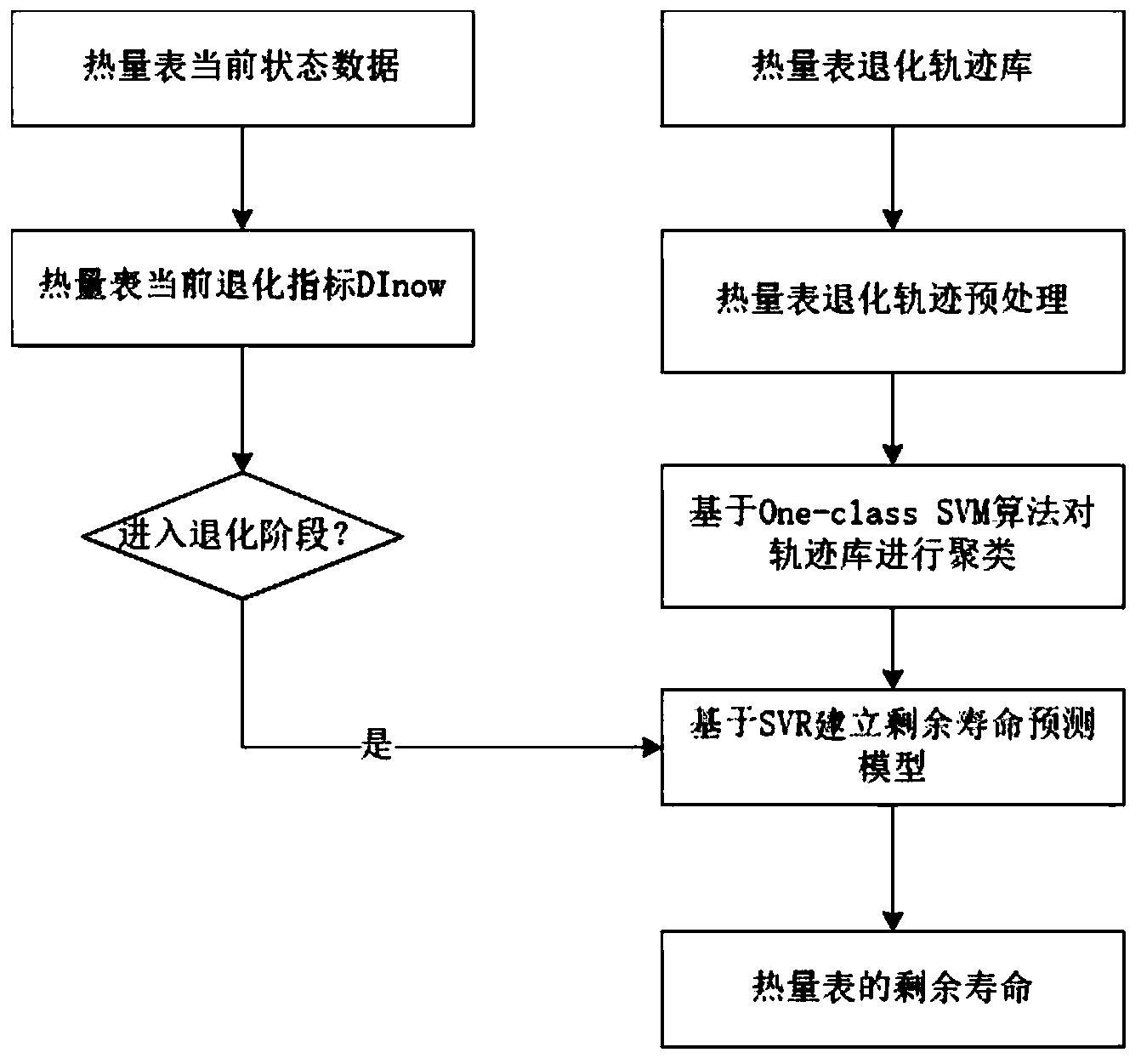
图3是本发明实施嵌入式热流传感器测量误差修正方法的流程示意图;
图4给出了本发明提出的嵌入式热流传感器测量误差修正方法修正值与预测值的对比图;
附图标记说明:1、嵌入式热流传感器;2、周围热防护材料;3、热电偶。
具体实施方式
下面结合附图和实施例对本发明的具体实施方法作进一步的详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
如图1所示,嵌入式热流传感器1在用于测量高超声速飞行器的表面热流时,由于传感器材料的热导率远远大于周围热防护材料2,因此传感器1与周围防热材料2之间将形成明显的温差,这一温差会改变高超声速飞行器表面的温度边界层结构。在该温差的影响下,热流传感器1表面将形成新的温度边界层,由于温度边界层起始位置处温度梯度极大,因此热流传感器1测量得到的热流值要明显大于真实值,即产生测量误差。
图2给出了飞行马赫数为12,飞行高度为50km,飞行攻角为零度时,测量热流与真实热流的当地值进行了对比,其中,Qhc表示防热材料2表面温度为Tw,热流传感1表面温度为Tc时的热流分布,即测量热流分布;Qh表示防热材料2表面温度为Tw,热流传感器1表面温度也为Tw时的热流分布,即真实热流分布;x表示当地热流的计算位置到飞行器前缘的距离。在本实施例中,Tw=500K,Tw=300K。
如图2所示,所述的嵌入式热流传感器测量误差的分布规律与温度边界层的发展规律较为相似,即从前缘处的极大值迅速减小,然后趋于稳定,因此可以根据温度边界层的预测方法对嵌入式热流传感器1的测量误差进行修正。
如图3所示,一种嵌入式热流传感器测量误差的修正方法,包含以下步骤:
S1、在靠近热流传感器1表面和防热材料2表面的位置放置热电偶3,利用热电偶3测量得到热流传感器1与周围防热材料2的表面温度;
S2、根据高超声速飞行器的飞行高度和飞行马赫数计算来流总温,然后结合测量得到的热流传感器1表面温度和防热材料2表面温度计算冷点温差系数,具体计算公式如下:
其中,T0为高超声速飞行器飞行状态对应的总温,Tc为嵌入式热流传感器1的表面温度,Tw为周围防热材料2的表面温度。
S3、计算测量热流的当地值Qhc与真实热流的当地值Qh的比值κ,其中,Qhc对应于防热材料表面温度为Tw,热流传感器表面温度为Tc时的情况;Qh对应于防热材料表面温度为Tw,热流传感器表面温度也为Tw的情况。根据飞行攻角的大小,采用分段计算方法,飞行攻角大于15°时的迎风面采用以下计算公式:
背风面以及飞行攻角小于15°的迎风面采用以下计算公式:
其中,α为飞行攻角;L表示热流传感器前缘到飞行器前缘的距离;x表示当地热流的计算位置到飞行器前缘的距离。
S4、基于S3中的当地热流比κ的计算结果,在嵌入式热流传感器1的测量面内作面积加权平均,得到嵌入式热流传感器测量表面的平均热流比κm,具体计算式如下:
S5、根据S4中计算得到的平均热流比κm对测量得到的热流值Qhc作出修正,得到真实、有效的热流值Qh:
图3所述的嵌入式热流传感器测量误差的修正方法适用于量热完全气体模型,因此高超声速飞行器的飞行马赫数应小于16,以减小热化学非平衡效应对热流传感器测量误差修正的影响。
图3所述的嵌入式热流传感器测量误差的修正方法适用于连续流模型,所述的高超声速飞行器的飞行高度应小于60km,以减小稀薄效应对热流传感器测量误差修正的影响。
如图4所示,所述的嵌入式热流传感器测量误差的修正方法能够有效地修正由冷点效应温差问题导致的热流测量误差,修正的精度较高,能够满足实际工程的需要。
一种嵌入式热流传感器测量误差的修正方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0