







![一种疏水性离子液体[MBPy]Tf2N的荧光检测方法](https://www.zhichawang.com/images/CN104655602A/CN104655602A.jpg)


专利摘要
本发明公开了一种基于泰勒级数展开的对室内目标的测距定位方法,主要解决了现有基于无线传播信号的室内定位技术中在无线信号传播模型情况下定位精度较低的问题。本发明的具体步骤是:1.设置室内目标的测距参考点;2.构建室内目标的有效测距信号样本集;3.统计室内目标的有效测距接入点个数;4.判断有效测距接入点的总数是否大于3;5.判断有效测距接入点的总数是否小于5;6.采用最小二乘法求解室内目标的位置坐标;7.采用泰勒级数展开得到围绕室内目标为中心的定位圈,求取定位圈的质心坐标作为室内目标的位置坐标。本发明将后向传播神经网络模型和泰勒级数展开相结合,提高了对室内目标的定位精度。
权利要求
1.一种基于泰勒级数展开对室内目标的测距定位方法,包括如下步骤:
(1)设置室内目标的测距参考点:
(1a)将室内目标的正东方向作为横轴,室内目标的正北方向作为纵轴,建立一个的坐标系;
(1b)以室内目标的质心作为同心圆的圆心,距圆心1米为起始值,每间隔1米作为半径共20个同心圆,在每个同心圆上均匀设置测距参考点;
(1c)记录所有测距参考点的物理地址和与坐标系对应的位置坐标;
(2)构建室内目标的有效测距信号样本集:
(2a)用户手持终端利用无线网络信号扫描工具,在室内目标的质心位置处每间隔3秒接收来自每一个无线信号接入点的接收信号强度值,共接收10次;
(2b)将接收到的所有无线信号接入点的接收信号强度值,经过小波滤波器滤除噪声后,计算每一个无线信号接入点的接收信号强度值的平均值;
(2c)将一个无线信号接入点的接收信号强度平均值以及与其对应的物理地址,构成该无线信号接入点的样本信息;
(2d)利用每一个无线信号接入点的样本信息构建测距信号样本集;
(2e)将测距信号样本集中样本的物理地址与测距参考点的物理地址相同的样本,添加到有效测距信号样本集中;
(3)统计室内目标的有效测距接入点总数:
(3a)将有效测距信号样本集中接收信号强度值在阈值范围内中的样本,作为有效测距接入点;
(3b)统计室内目标的有效测距接入点总数;
(4)判断有效测距接入点的总数是否大于3,若是,则执行步骤(5),否则,利用数学处理方法,得到室内目标的位置估计值,执行步骤(9);
(5)判断有效测距接入点的总数是否小于5,若是,则执行步骤(6),否则,执行步骤(7);
(6)采用最小二乘法实现对室内目标进行定位:
(6a)按照下式,计算差值矩阵中每一行的第一列元素:
Xi1=xj-xk
其中,Xi1表示排列在差值矩阵第i行中的第一列元素,xj表示第j个有效测距接入点的横坐标值,j的取值与i相同,j在1到有效测距接入点总数减1范围内取值,xk表示第k个有效测距接入点的横坐标值,k的取值与有效测距接入点总数相同;
(6b)按照下式,计算差值矩阵中每一行的第二列元素:
Yn2=ym-yp
其中,Yn2表示排列在差值矩阵X第n行第二列的元素,ym表示第m个有效测距接入点的纵坐标值,m的取值与n相同,m在1到有效测距接入点总数减1范围内取值,yp表示第p个有效测距接入点的纵坐标值,p的取值与有效测距接入点总数相同;
(6c)按照下式,计算过渡列向量中每一行的元素:
Ya=xk2+yp2+db2-xb2-yb2-dh2
其中,Ya表示排列在过渡列向量Y中第a行的元素,db表示以第b个有效测距接入点的信号强度值作为测距模型的输入对应得到的输出,b的取值与a相同,xb表示第b个有效测距节点的横坐标,yb表示第b个有效测距接入点的纵坐标,dh表示以第h个有效测距接入点的信号强度值作为测距模型的输入对应得到的输出,h的取值与有效测距接入点总数相同;
(6d)按照下式,计算室内目标的位置坐标列向量:
location=[(XTX)-1XTY]T
其中,location表示室内目标的位置坐标列向量,X表示差值矩阵,T表示转置操作,-1表示求逆操作,Y表示过渡列向量;
(6e)将所计算得到的位置坐标列向量location中第一行元素作为室内目标的横坐标估计值,第二行元素作为室内目标的纵坐标估计值;
(7)获取室内目标定位圈:
(7a)依据有效测距接入点的接收信号强度值从大到小进行排序;
(7b)选取一个任意大于3且小于有效测距接入点总数的正整数作为分组间距,在已排好序的有效测距接入点中依次选取接入点作为分组起始点,从分组起始点开始选取分组间距个有效测距接入点作为一个分组,可得到的分组总数为有效测距接入点总数与分组间距之差加1;
(7c)将每一组的有效测距接入点的接收信号强度值输入到测距模型,将测距模型的输出作为当前分组的距离信息;
(7d)采用泰勒级数展开定位法,依次根据每一组有效测距接入点的距离信息,得到对应的室内目标位置估计值;
(7e)将根据所有分组所求得的室内目标估计位置依次连接形成一个以室内目标为中心的定位圈;
(8)获得室内目标位置坐标估计值:
(8a)按照下列公式,计算定位圈的质心系数:
其中,B表示定位圈的质心系数,∑表示求和操作,Q表示已排序有效测距接入点的分组总数,locq,x表示第q个分组对应的室内目标位置估计点的横坐标,locq+1,y表示第q+1个分组对应的室内目标位置估计点的纵坐标,locq+1,x表示第q+1个分组对应的室内目标位置估计点的横坐标,locq,y表示第q个分组对应的室内目标位置估计点的纵坐标;
(8b)按照下式,计算定位圈质心的坐标估计值:
其中,locationx表示定位圈质心的横坐标估计值,locationy表示定位圈质心的纵坐标估计值;
(8c)将定位圈质心的横坐标作为室内目标的横坐标估计值,定位圈质心的纵坐标作为室内目标的纵坐标估计值;
(9)在室内地图上显示室内目标的位置:
(9a)按照转换比例,将室内目标所处室内环境的平面图转化为对应的室内地图;
(9b)按照转换比例,将室内目标估计位置估计坐标转换为像素点坐标,在室内地图上标识像素点坐标所在的位置。
2.根据权利要求1所述的基于泰勒级数展开对室内目标的测距定位方法,其特征在于,步骤(3a)中所述的阈值范围为[-100dB,0dB]。
3.根据权利要求1所述的基于泰勒级数展开对室内目标的测距定位方法,其特征在于,步骤(4)中所述的数学处理方法是指按照下列三种情况分别进行处理:
第一种,当有效测距接入点的总数为0时,将(0,0)作为室内目标的位置估计;
第二种,当有效测距接入点的总数为1时,将接入点的坐标作为室内目标的位置估计;
第三种,当有效测距接入点的总数为2时,将接入点的坐标的加权平均值,作为室内目标的位置估计;所述的加权系数是由下式计算得到的:
其中,wc表示第c个有效测距接入点的加权系数,dc表示第c个有效测距接入点的接收信号强度值输入到测距模型后得到的输出。
4.根据权利要求1所述的基于泰勒级数展开对室内目标的测距定位方法,其特征在于,步骤(6c)、步骤(7c)中所述的测距模型是按照下式构建的:
第一步,选择一个与测距参考点使用的同批次同型号的无线信号发射器,放置在可视距离超过30米的任意位置处;
第二步,以所选的无线信号发射器的放置点作为信号发射源,距离源点0.8米处作为第一个标记点,每间隔0.8米选取一个标记点,依次获取50个标记点,记录每一个标记点与信号发射源的直线距离值;
第三步,在每一个标记点处,每隔1分钟采集一次无线信号发射器的接收信号强度值,共采集60次;
第四步,将每个标记点采集到的接收信号强度值,经过小波滤波器进行滤波,计算每个标记点接收信号强度平均值;
第五步,将所有标记点的接收信号平均值与其对应标记点的直线距离值作为训练样本;
第七步,对训练样本进行归一化;
第八步,建立后向传播神经网络模型,将共轭梯度法作为其训练算法,sigmoid作为激励函数,神经网络模型结构定为1:26:1;
第九步,确定了后向传播神经网络模型后,利用训练样本反复训练后向传播神经网络直到误差小于1,保存训练所得到的后向传播神经网络参数,同时将其封装成一个测距模型。
5.根据权利要求1所述的基于泰勒级数展开对室内目标的测距定位方法,其特征在于,步骤(7d)所述的泰勒级数展开定位法是利用泰勒级数展开的数学原理计算室内目标的位置坐标的一种方法,具体执行步骤如下:
第一步,选取室内任何位置坐标作为室内目标位置初始值,[0.01,1]中的任意数作为预期期望误差;
第二步,根据有效测距接入点到所设置的室内目标初始位置之间的距离差值关系获得泰勒展开公式如下:
其中,fs(xe,ye)表示第s个有效接入点分组对应的泰勒级数展开公式,xc表示第c个有效测距接入点的纵坐标值,yc表示第c个有效测距接入点的纵坐标值,s的取值与c相同,xe表示所设置的室内目标位置的初始横坐标,ye表示所设置的坐标初始的纵坐标值, 表示开根号符号,|·|表示求绝对值操作;
第三步,依据第s个有效接入点的泰勒级数展开公式fs(xe,ye)对所设置的室内目标位置的初始横坐标求取一阶导数作为导数矩阵第s行第一列元素,对所设置的室内目标位置的初始纵坐标求一阶导数,将该一阶导数值作为导数矩阵第s行第二列元素,获得导数矩阵;
第四步,按照下式,计算有效测距接入点到所设置的初始位置的距离差值,将第j个有效测距接入点到所设初始位置的距离差值排列在距离差值矩阵的第j行第一列,获得距离差值列向量:
其中,disr表示第r个有效测距接入点到所设置的所设的初始位置的距离差值, 表示开根号操作,r的取值过程与c对应相等;
第五步,按照下式,对一组有效测距节点依据泰勒展开公式得到差值列向量:
其中,Δ表示计算得到的室内目标坐标估计值与所设定的初始坐标值的差值列向量,[·]表示向量符号,Δx表示室内目标横坐标差值估计值,Δy表示室内目标纵坐标差值估计值,A表示导数矩阵,F表示距离差值列向量;
第六步,按照下式,判断差值列向量是否满足泰勒级数展开定位结束条件Δx+Δy≤ε,其中,ε表示所设置的预期期望误差,若是,则执行第八步,否则,执行第七步;
第七步,将所设置的室内目标位置的初始横坐标与横坐标差值估计之和替换所设置的初始横坐标,初始纵坐标与纵坐标差值估计之和替换所设置初始纵坐标,执行第二步;
第八步,将室内目标差值与所设置的初始位置坐标之和作为最终的结果输出。
6.根据权利要求1所述的基于泰勒级数展开对室内目标的测距定位方法,其特征在于,步骤(9)中所述的转换比例是实际平面图转换为位图的比例,具体比例为每个像素点代表1米。
说明书
技术领域
本发明属于通信技术领域,更进一步涉及无线室内定位技术领域的一种基于泰勒级数展开对室内目标的测距定位方法。本发明可以利用无线传播信号强度值对室内目标实现高精度定位,本发明可广泛应用于基于无线信号强度值实现测距定位的应用场合。
背景技术
室内定位技术在消费者和企业服务领域都有广阔的发展前景,其可以为消费者提供商场导购、停车场反向寻车,家人防走散、位置服务交友、展厅自助导游等服务。企业应用则包括人流监控和分析、智慧仓储和物流、智能制造、紧急救援、人员资产管理和服务机器人等,可以促进零售、急救、制造、能源、医疗等行业加速拥抱物联网和大数据,大幅提升营销和运营效率。
基于无线信号强度的室内定位技术主要分为场景分析法和测距定位两种方法。场景分析法通过匹配在线阶段与离线阶段收集到的信息序列从而决定无线终端更靠近哪个指纹点,相似度最高的指纹点就是估计出的位置。测距定位法是根据信号在自由空间经过传播路径损耗信号强度随距离而变化的一种计算方法,根据其变化规律推算出无线终端的估计位置。在实际应用中,由于无线传播信号在复杂的室内环境中易受到反射、绕射、散射、多径效应等因素影响,使得无线信号在传播过程中造成路径损耗从而在定位过程中引起定位误差。为了解决路径损耗带来的定位误差的问题,通常选择特定环境下能够更加贴切描述无线信号传播过程的路径损耗模型和性能更优的定位算法,期望通过更加准确的信号强度和距离之间的关系和改进的定位算法来提高定位精度。
电子科技大学在所提出的专利申请文件“一种室内定位方法”(申请号:201210332190.8,公开号:102880673A)中公开了一种基于所有参考点的近邻点数据的情景分析定位方法。该方法通过在离线阶段建立近邻点数据库,在线阶段将待定位点的K个近邻点和它的近邻点的n个近邻点的坐标加权求和作为待定位点的坐标估计结果返回。虽然该方法一定程度上挖掘了RSS指纹数据库中有效信息,有效避免了非视距传输效应、多径传播效应等因素对定位精度的影响,但该方法仍然存在的不足是,应用环境下某一参考点位置发生变化将导致所建立的数据库不能使用,后期维护成本过大不利于推广。
哈尔滨工业大学在所提出的专利申请文件“WiFi室内定位方法”(申请号:201310017411.7,公开号:103096466A)中公开了一种基于支持向量机计算待定位点坐标的定位方法。该方法通过在离线阶段由支持向量机算法预先将数据按照不同的空间位置合理划分为若干子区域,在线定位阶段通过主成分分析算法得到待定位点坐标估计值。虽然该方法可以大幅降低数据量,通过区域空间坐标的聚集达到提高定位精度的目的,但该方法仍然存在的不足是,近邻点之间相似度不足,不能去除定位中奇异点对定位结果的不利影响,只能进行区域的区分,不能提高定位结果的稳定性和进行高精度定位。
发明内容
本发明的目的在于克服上述已有的技术的不足,提出了一种基于泰勒级数展开对室内目标的测距定位方法,实现了高精度的室内测距定位技术。
实现本发明的基本思想是,将采集到的所有有效测距接入点的接收信号强度值通过小波滤波器滤波,依据接收信号强度值从大到小进行排序,选取合适的分组间距对已排好序的有效测距接入点进行分组,将每一组有效测距接入点的接收信号强度值经过已训练好的后向传播神经网络模型得到对应的距离信息,利用每组的距离信息按照泰勒级数展开得到对应的室内目标位置坐标估计值,将所有位置坐标估计值依次连接形成定位圈,求取此定位圈的质心坐标作为室内目标的最终的位置坐标。
本发明的具体步骤如下:
(1)设置室内目标的测距参考点:
(1a)将室内目标的正东方向作为横轴,室内目标的正北方向作为纵轴,建立一个的坐标系;
(1b)以室内目标的质心作为同心圆的圆心,距圆心1米为起始值,每间隔1米作为半径共20个同心圆,在每个同心圆上均匀设置测距参考点;
(1c)记录所有测距参考点的物理地址和与坐标系对应的位置坐标;
(2)构建室内目标的有效测距信号样本集:
(2a)用户手持终端利用无线网络信号扫描工具,在室内目标的质心位置处每间隔3秒接收来自每一个无线信号接入点的接收信号强度值,共接收10次;
(2b)将接收到的所有无线信号接入点的接收信号强度值,经过小波滤波器滤除噪声后,计算每一个无线信号接入点的接收信号强度值的平均值;
(2c)将一个无线信号接入点的接收信号强度平均值以及与其对应的物理地址,构成该无线信号接入点的样本信息;
(2d)利用每一个无线信号接入点的样本信息构建测距信号样本集;
(2e)将测距信号样本集中样本的物理地址与测距参考点的物理地址相同的样本,添加到有效测距信号样本集中;
(3)统计室内目标的有效测距接入点总数:
(3a)将有效测距信号样本集中接收信号强度值在阈值范围内中的样本,作为有效测距接入点;
(3b)统计室内目标的有效测距接入点总数;
(4)判断有效测距接入点的总数是否大于3,若是,则执行步骤(5),否则,利用数学处理方法,得到室内目标的位置估计值,执行步骤(9);
(5)判断有效测距接入点的总数是否小于5,若是,则执行步骤(6),否则,执行步骤(7);
(6)采用最小二乘法实现对室内目标进行定位:
(6a)按照下式,计算差值矩阵中每一行的第一列元素:
Xi1=xj-xk
其中,Xi1表示排列在差值矩阵第i行中的第一列元素,xj表示第j个有效测距接入点的横坐标值,j的取值与i相同,j在1到有效测距接入点总数减1范围内取值,xk表示第k个有效测距接入点的横坐标值,k的取值与有效测距接入点总数相同;
(6b)按照下式,计算差值矩阵中每一行的第二列元素:
Yn2=ym-yp
其中,Yn2表示排列在差值矩阵X第n行第二列的元素,ym表示第m个有效测距接入点的纵坐标值,m的取值与n相同,m在1到有效测距接入点总数减1范围内取值,yp表示第p个有效测距接入点的纵坐标值,p的取值与有效测距接入点总数相同;
(6c)按照下式,计算过渡列向量中每一行的元素:
Ya=xk2+yp2+db2-xb2-yb2-dh2
其中,Ya表示排列在过渡列向量Y中第a行的元素,db表示以第b个有效测距接入点的信号强度值作为测距模型的输入对应得到的输出,b的取值与a相同,xb表示第b个有效测距节点的横坐标,yb表示第b个有效测距接入点的纵坐标,dh表示以第h个有效测距接入点的信号强度值作为测距模型的输入对应得到的输出,h的取值与有效测距接入点总数相同;
(6d)按照下式,计算室内目标的位置坐标列向量:
location=[(XTX)-1XTY]T
其中,location表示室内目标的位置坐标列向量,X表示差值矩阵,T表示转置操作,-1表示求逆操作,Y表示过渡列向量;
(6e)将所计算得到的位置坐标列向量location中第一行元素作为室内目标的横坐标估计值,第二行元素作为室内目标的纵坐标估计值;
(7)获取室内目标定位圈:
(7a)依据有效测距接入点的接收信号强度值从大到小进行排序;
(7b)选取一个任意大于3且小于有效测距接入点总数的正整数作为分组间距,在已排好序的有效测距接入点中依次选取接入点作为分组起始点,从分组起始点开始选取分组间距个有效测距接入点作为一个分组,可得到的分组总数为有效测距接入点总数与分组间距之差加1;
(7c)将每一组的有效测距接入点的接收信号强度值输入到测距模型,将测距模型的输出作为当前分组的距离信息;
(7d)采用泰勒级数展开定位法,依次根据每一组有效测距接入点的距离信息,得到对应的室内目标位置估计值;
(7e)将根据所有分组所求得的室内目标估计位置依次连接形成一个以室内目标为中心的定位圈;
(8)获得室内目标位置坐标估计值:
(8a)按照下列公式,计算定位圈的质心系数:
其中,B表示定位圈的质心系数,Σ表示求和操作,Q表示已排序有效测距接入点的分组总数,locq,x表示第q个分组对应的室内目标位置估计点的横坐标,locq+1,y表示第q+1个分组对应的室内目标位置估计点的纵坐标,locq+1,x表示第q+1个分组对应的室内目标位置估计点的横坐标,locq,y表示第q个分组对应的室内目标位置估计点的纵坐标;
(8b)按照下式,计算定位圈质心的坐标估计值:
其中,locationx表示定位圈质心的横坐标估计值,locationy表示定位圈质心的纵坐标估计值;
(8c)将定位圈质心的横坐标作为室内目标的横坐标估计值,定位圈质心的纵坐标作为室内目标的纵坐标估计值;
(9)在室内地图上显示室内目标的位置:
(9a)按照转换比例,将室内目标所处室内环境的平面图转化为对应的室内地图;
(9b)按照转换比例,将室内目标估计位置估计坐标转换为像素点坐标,在室内地图上标识像素点坐标所在的位置。
本发明与现有技术相比具有如下优点:
第一,由于本发明通过引入小波滤波器,对采集到的所有无线信号强度值进行数据预处理,克服了高斯滤波技术缺乏对无线信号的非平稳特性刻画的不足,使得本发明滤除了奇异点对定位结果的影响,进而提高了定位结果的稳定性。
第二,由于本发明对有效测距接入点的接收信号强度值从大到小进行排序,最大化利用了接入点信号强度值越大与室内目标距离越近这一原理,克服了现有技术中有效测距接入点与室内目标的相似度关系不明确的不足,使得本发明获得的室内目标的位置与有效测距接入点的相似度得到提高,定位圈质心坐标更靠近室内目标所在的实际位置,不需要后期维护,提高了定位精度。
第三,由于本发明在有效测距接入点个数不小于5的情况下根据泰勒级数展开获得室内目标定位圈,以定位圈的质心位置作为最终的室内目标位置估计,克服了现有技术中对定位过程只依靠指纹库中近邻点的相似度求取室内目标的位置估计的不足,在求解过程中根据所设的预期阈值不断的调整,直到达到预期误差才会返回的位置形成的定位圈质心坐标作为最终结果,即使测量距离存在一定误差时,使得本发明具有高精度的定位优点。
附图说明
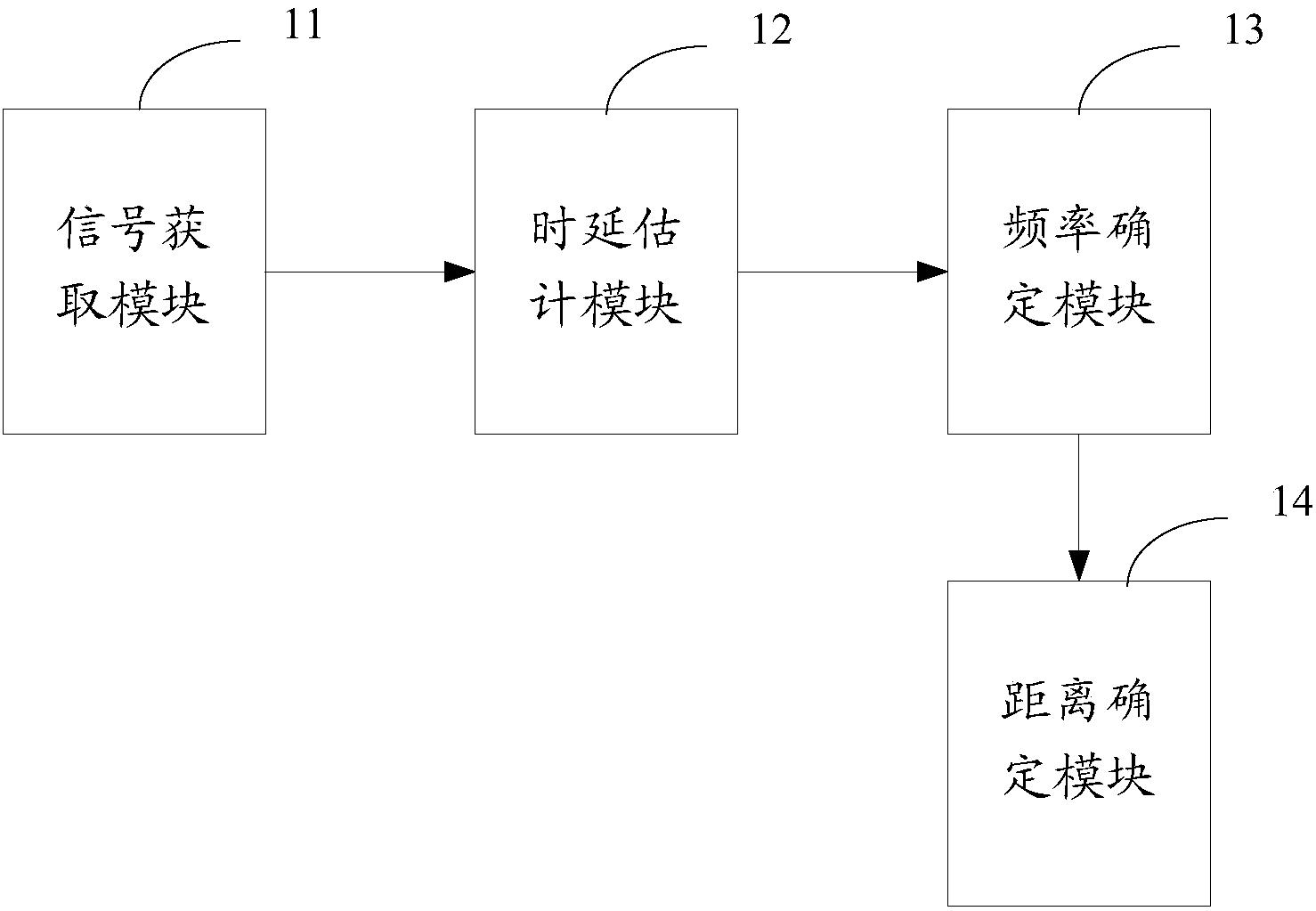
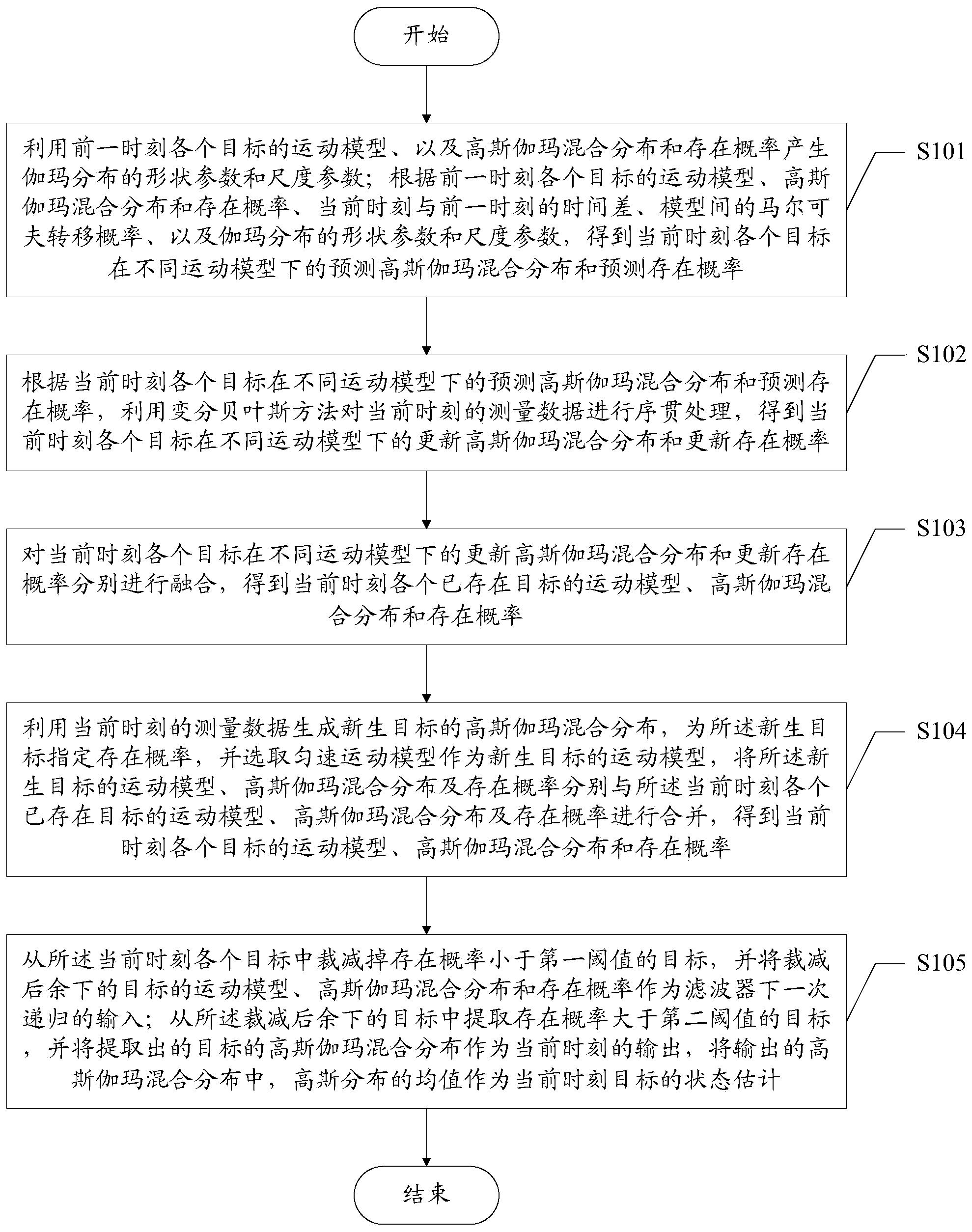
图1为本发明的流程图;
图2为本发明所采用的泰勒级数展开定位方法的示意图;
具体实施方式
下面结合附图对本发明做进一步的描述。
参照图1,本发明的具体步骤如下。
步骤1.设置室内目标的测距参考点。
将室内目标的正东方向作为横轴,室内目标的正北方向作为纵轴,建立一个的坐标系。
以室内目标的质心作为同心圆的圆心,距圆心1米为起始值,每间隔1米作为半径共20个同心圆,在每个同心圆上均匀设置测距参考点。
记录所有测距参考点的物理地址和与坐标系对应的位置坐标。
步骤2.构建室内目标的有效测距信号样本集。
用户手持终端利用无线网络信号扫描工具,在室内目标的质心位置处每间隔3秒接收来自每一个无线信号接入点的接收信号强度值,共接收10次。
将接收到的所有无线信号接入点的接收信号强度值,经过小波滤波器滤除噪声后,计算每一个无线信号接入点的接收信号强度值的平均值。
将一个无线信号接入点的接收信号强度平均值以及与其对应的物理地址,构成该无线信号接入点的样本信息。
利用每一个无线信号接入点的样本信息构建测距信号样本集。
将测距信号样本集中样本的物理地址与测距参考点的物理地址相同的样本,添加到有效测距信号样本集中。
步骤3.统计室内目标的有效测距接入点总数。
将有效测距信号样本集中接收信号强度值在阈值范围内中的样本,作为有效测距接入点,所设置的阈值范围为[-100dB,0dB]。
统计室内目标的有效测距接入点总数。
步骤4.判断有效测距接入点的总数是否大于3,若是,则执行步骤(5),否则,利用数学处理方法,得到室内目标的位置估计值,执行步骤(9)。
数学处理方法是指按照下列三种情况分别进行处理:
第一种,当有效测距接入点的总数为0时,将(0,0)作为室内目标的位置估计;
第二种,当有效测距接入点的总数为1时,将接入点的坐标作为室内目标的位置估计;
第三种,当有效测距接入点的总数为2时,将接入点的坐标的加权平均值,作为室内目标的位置估计;所述的加权系数是由下式计算得到的:
其中,wc表示第c个有效测距接入点的加权系数,dc表示第c个有效测距接入点的接收信号强度值输入到测距模型后得到的输出。
步骤5.判断有效测距接入点的总数是否小于5,若是,则执行步骤(6),否则,执行步骤(7)。
步骤6.采用最小二乘法实现对室内目标进行定位:
按照下式,计算差值矩阵中每一行的第一列元素:
Xi1=xj-xk
其中,Xi1表示排列在差值矩阵第i行中的第一列元素,xj表示第j个有效测距接入点的横坐标值,j的取值与i相同,j在1到有效测距接入点总数减1范围内取值,xk表示第k个有效测距接入点的横坐标值,k的取值与有效测距接入点总数相同。
按照下式,计算差值矩阵中每一行的第二列元素:
Yn2=ym-yp
其中,Yn2表示排列在差值矩阵X第n行第二列的元素,ym表示第m个有效测距接入点的纵坐标值,m的取值与n相同,m在1到有效测距接入点总数减1范围内取值,yp表示第p个有效测距接入点的纵坐标值,p的取值与有效测距接入点总数相同。
按照下式,计算过渡列向量中每一行的元素:
Ya=xk2+yp2+db2-xb2-yb2-dh2
其中,Ya表示排列在过渡列向量Y中第a行的元素,db表示以第b个有效测距接入点的信号强度值作为测距模型的输入对应得到的输出,b的取值与a相同,xb表示第b个有效测距节点的横坐标,yb表示第b个有效测距接入点的纵坐标,dh表示以第h个有效测距接入点的信号强度值作为测距模型的输入对应得到的输出,h的取值与有效测距接入点总数相同。
测距模型是按照下式构建的:
第一步,选择一个与测距参考点使用的同批次同型号的无线信号发射器,放置在可视距离超过30米的任意位置处;
第二步,以所选的无线信号发射器的放置点作为信号发射源,距离源点0.8米处作为第一个标记点,每间隔0.8米选取一个标记点,依次获取50个标记点,记录每一个标记点与信号发射源的直线距离值;
第三步,在每一个标记点处,每隔1分钟采集一次无线信号发射器的接收信号强度值,共采集60次;
第四步,将每个标记点采集到的接收信号强度值,经过小波滤波器进行滤波,计算每个标记点接收信号强度平均值;
第五步,将所有标记点的接收信号平均值与其对应标记点的直线距离值作为训练样本;
第七步,对训练样本进行归一化;
第八步,建立后向传播神经网络模型,将共轭梯度法作为其训练算法,sigmoid作为激励函数,神经网络模型结构定为1:26:1;
第九步,确定了后向传播神经网络模型后,利用训练样本反复训练后向传播神经网络直到误差小于1,保存训练所得到的后向传播神经网络参数,同时将其封装成一个测距模型。
按照下式,计算室内目标的位置坐标列向量:
location=[(XTX)-1XTY]T
其中,location表示室内目标的位置坐标列向量,X表示差值矩阵,T表示转置操作,-1表示求逆操作,Y表示过渡列向量。
将所计算得到的位置坐标列向量location中第一行元素作为室内目标的横坐标估计值,第二行元素作为室内目标的纵坐标估计值。
步骤7.获取室内目标定位圈。
依据有效测距接入点的接收信号强度值从大到小进行排序。
选取一个任意大于3且小于有效测距接入点总数的正整数作为分组间距,在已排好序的有效测距接入点中依次选取接入点作为分组起始点,从分组起始点开始选取分组间距个有效测距接入点作为一个分组,可得到的分组总数为有效测距接入点总数与分组间距之差加1。
将每一组的有效测距接入点的接收信号强度值输入到测距模型,将测距模型的输出作为当前分组的距离信息。
采用泰勒级数展开定位法,依次根据每一组有效测距接入点的距离信息,得到对应的室内目标位置估计值。
泰勒级数展开定位法是利用泰勒级数展开的数学原理计算室内目标的位置坐标的一种方法,具体执行步骤如下:
第一步,选取室内任何位置坐标作为室内目标位置初始值,[0.01,1]中的任意数作为预期期望误差;
第二步,根据有效测距接入点到所设置的室内目标初始位置之间的距离差值关系获得泰勒展开公式如下:
其中,fs(xe,ye)表示第s个有效接入点分组对应的泰勒级数展开公式,xc表示第c个有效测距接入点的纵坐标值,yc表示第c个有效测距接入点的纵坐标值,s的取值与c相同,xe表示所设置的室内目标位置的初始横坐标,ye表示所设置的坐标初始的纵坐标值, 表示开根号符号,|·|表示求绝对值操作;
第三步,依据第s个有效接入点的泰勒级数展开公式fs(xe,ye)对所设置的室内目标位置的初始横坐标求取一阶导数作为导数矩阵第s行第一列元素,对所设置的室内目标位置的初始纵坐标求一阶导数,将该一阶导数值作为导数矩阵第s行第二列元素,获得导数矩阵;
第四步,按照下式,计算有效测距接入点到所设置的初始位置的距离差值,将第j个有效测距接入点到所设初始位置的距离差值排列在距离差值矩阵的第j行第一列,获得距离差值列向量:
其中,disr表示第r个有效测距接入点到所设置的所设的初始位置的距离差值, 表示开根号操作,r的取值过程与c对应相等;
第五步,按照下式,对一组有效测距节点依据泰勒展开公式得到差值列向量:
其中,Δ表示计算得到的室内目标坐标估计值与所设定的初始坐标值的差值列向量,[·]表示向量符号,Δx表示室内目标横坐标差值估计值,Δy表示室内目标纵坐标差值估计值,A表示导数矩阵,F表示距离差值列向量;
第六步,按照下式,判断差值列向量是否满足泰勒级数展开定位结束条件Δx+Δy≤ε,其中,ε表示所设置的预期期望误差,若是,则执行第八步,否则,执行第七步;
第七步,将所设置的室内目标位置的初始横坐标与横坐标差值估计之和替换所设置的初始横坐标,初始纵坐标与纵坐标差值估计之和替换所设置初始纵坐标,执行第二步;
第八步,将室内目标差值与所设置的初始位置坐标之和作为最终的结果输出。
参照图2的泰勒级数展开定位流程图对每一组有效测距接入点的距离信息得到室内目标位置估计坐标。图2中的X表示所设置的初始横坐标,Y表示所设置的初始纵坐标,Δx表示利用泰勒级数方法计算得到的横坐标与设置的初始值之间的差值,Δy表示利用泰勒级数方法计算得到的纵坐标与所设置的初始值之间的差值,ε表示所设置的预期期望误差,Δx+Δy≤ε表示判断当前计算是否结束的条件。
将根据所有分组所求得的室内目标估计位置依次连接形成一个以室内目标为中心的定位圈。
步骤8.获得室内目标位置坐标估计值。
按照下列公式,计算定位圈的质心系数:
其中,B表示定位圈的质心系数,∑表示求和操作,Q表示已排序有效测距接入点的分组总数,locq,x表示第q个分组对应的室内目标位置估计点的横坐标,locq+1,y表示第q+1个分组对应的室内目标位置估计点的纵坐标,locq+1,x表示第q+1个分组对应的室内目标位置估计点的横坐标,locq,y表示第q个分组对应的室内目标位置估计点的纵坐标。
按照下式,计算定位圈质心的坐标估计值:
其中,locationx表示定位圈质心的横坐标估计值,locationy表示定位圈质心的纵坐标估计值。
将定位圈质心的横坐标作为室内目标的横坐标估计值,定位圈质心的纵坐标作为室内目标的纵坐标估计值。
步骤9.在室内地图上显示室内目标的位置:
按照转换比例,将室内目标所处室内环境的平面图转化为对应的室内地图。
按照转换比例,将室内目标估计位置估计坐标转换为像素点坐标,在室内地图上标识像素点坐标所在的位置。
转换比例是实际平面图转换为位图的比例,具体比例为每个像素点代表1米。
基于泰勒级数展开对室内目标的测距定位方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0