









专利摘要
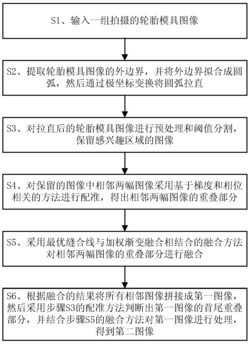
本发明公开了一种无人机大视场高光谱图像生成方法及系统,本发明方法包括针对输入无人机采集得到的参考高光谱图像与待拼接高光谱图像,将待拼接高光谱图像逐波段变换到参考高光谱图像的同一坐标系下,确定参考高光谱图像、待拼接高光谱图像的重叠区域;利用重叠区域对待拼接高光谱图像的各个波段进行光谱一致化校正;计算参考高光谱图像、待拼接高光谱图像的重叠区域的最佳缝合线,采用权重金字塔图像融合策略,基于最佳缝合线对高光谱图像逐波段融合,获得最终的无缝拼接的大视场高光谱图像。本发明能够在相邻高光谱条带图像重叠率较低的实际场景下准确地完成无缝拼接,生成大视场高光谱图像,并且有效消除光谱不一致的问题。
权利要求
1.一种无人机大视场高光谱图像生成方法,其特征在于,包括:
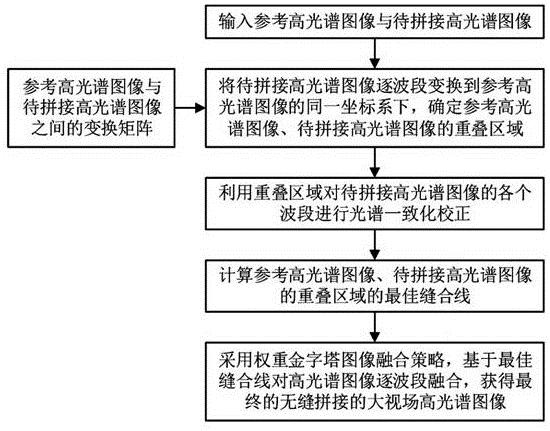
1)针对输入无人机采集得到的参考高光谱图像与待拼接高光谱图像,通过预设的参考高光谱图像与待拼接高光谱图像之间的变换矩阵,将待拼接高光谱图像逐波段变换到参考高光谱图像的同一坐标系下,确定参考高光谱图像、待拼接高光谱图像的重叠区域;
2)利用重叠区域对待拼接高光谱图像的各个波段进行光谱一致化校正;
3)计算参考高光谱图像、待拼接高光谱图像的重叠区域的最佳缝合线,采用权重金字塔图像融合策略,基于最佳缝合线对高光谱图像逐波段融合,获得最终的无缝拼接的大视场高光谱图像。
2.根据权利要求1所述的无人机大视场高光谱图像生成方法,其特征在于,步骤1)之前还包括获取参考高光谱图像与待拼接高光谱图像之间的变换矩阵的步骤:
S1)针对无人机采集得到的参考高光谱图像样本与待拼接高光谱图像样本,分别提取指定特征波段的特征波段图像中的特征点;
S2)遍历待拼接高光谱图像样本中的特征点,找到在参考高光谱图像样本中匹配的特征点,得到参考高光谱图像与待拼接高光谱图像之间的初始特征点匹配关系;
S3)针对参考高光谱图像与待拼接高光谱图像之间的初始特征点匹配关系,消除错误的特征点匹配关系,得到最终的特征点坐标对应关系;
S4)根据最终的特征点坐标对应关系,得到预设的参考高光谱图像与待拼接高光谱图像之间的变换矩阵。
3.根据权利要求2所述的无人机大视场高光谱图像生成方法,其特征在于,步骤S1)中指定特征波段为波长与730纳米的差值小于预设阈值的波段。
4.根据权利要求2所述的无人机大视场高光谱图像生成方法,其特征在于,步骤S2)中在参考高光谱图像样本中匹配的特征点是指欧氏距离最小的特征点。
5.根据权利要求2所述的无人机大视场高光谱图像生成方法,其特征在于,步骤S3)中消除错误的特征点匹配关系的步骤包括:首先采用随机抽样一致算法RANSAC初步消除错误的特征点匹配关系,然后利用匹配点坐标对应的光谱曲线,计算光谱信息散度
6.根据权利要求1所述的无人机大视场高光谱图像生成方法,其特征在于,步骤2)包括:基于参考高光谱图像、待拼接高光谱图像的重叠区域根据下式计算待拼接高光谱图像的各个波段的校正参数;
上式中,
7.根据权利要求1所述的无人机大视场高光谱图像生成方法,其特征在于,步骤3)中计算参考高光谱图像、待拼接高光谱图像的重叠区域的最佳缝合线包括:
3.1)根据下式计算缝合线所经过像素点所包含的信息量
上式中,
3.2)根据缝合线所经过像素点所包含的信息量
8.根据权利要求1所述的无人机大视场高光谱图像生成方法,其特征在于,步骤3)中基于最佳缝合线对高光谱图像逐波段融合的函数表达式为:
上式中,
9.一种无人机大视场高光谱图像生成系统,包括相互连接的微处理器和存储器,其特征在于,该微处理器被编程或配置以执行权利要求1~8中任意一项所述无人机大视场高光谱图像生成方法的步骤。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质中存储有被编程或配置以执行权利要求1~8中任意一项所述无人机大视场高光谱图像生成方法的计算机程序。
一种无人机大视场高光谱图像生成方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0