










专利摘要
本发明公开了一种八面体桁架单元变几何桁架一体化主动杆和主节点,包括主动杆和与所述主动杆相连的主节点;主节点包括主动杆座、主节点框体、U型座、十字轴连接件、U型被动杆连接件、平头扩展螺帽、主动杆端连接螺栓、第一球轴承、第二球轴承、第一滑动垫圈、第二滑动垫圈、第三滑动垫圈、滑动轴承;主动杆包括微驱动器、滚珠丝杠螺母、滚珠丝杠、碳纤维增强复合材料管、第一杆端螺母、第二杆端螺母、微行程开关、微行程开关触头、微行程开关座、丝杠限位螺帽。本发明能够实现高伸缩率、轻质、简洁、高刚度、高精度、低功率、无运动冗余、小尺寸、小冲击,可应用于航天空间可展机构、操纵机构、跟踪机构、工业控制机构。
权利要求
1.一种八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,包括主动杆和与所述主动杆相连的主节点;
所述主节点包括主动杆座、主节点框体、U型座、十字轴连接件、U型被动杆连接件、平头扩展螺帽、主动杆端连接螺栓、第一球轴承、第二球轴承、第一滑动垫圈、第二滑动垫圈、第三滑动垫圈、滑动轴承;
所述主动杆包括微驱动器、滚珠丝杠螺母、滚珠丝杠、碳纤维增强复合材料管、第一杆端螺母、第二杆端螺母、微行程开关、微行程开关触头、微行程开关座、丝杠限位螺帽;
其中,所述主动杆座设置在所述主节点框体中,所述主节点框体包括主动杆连接板、节点承板和节点端板,所述主动杆连接板和所述节点承板设置在所述主动杆座的侧面,所述主动杆连接板的两端分别与所述节点端板连接,同时所述节点承板的两端分别与所述节点端板连接,从而形成所述主节点框体;所述主动杆座的上下两端分别通过定位螺丝与所述节点端板连接,所述节点端板的上下两端分别与所述第一滑动垫圈和所述第二滑动垫圈连接,所述节点端板的中心内嵌置有所述第一球轴承;所述U型座的中心内连接有所述第三滑动垫圈,并嵌置有所述第二球轴承;所述U型座连接、所述U型被动杆连接件与所述十字轴连接件连接并构成万向铰;所述主动杆端连接螺栓与所述主动杆连接板连接,并穿过所述主动杆连接板连接到所述主动杆,使所述主动杆与所述主动杆座的侧面连接;
所述滚珠丝杠的一端与所述微驱动器连接,并且所述滚珠丝杠上穿套所述滚珠丝杠螺母,所述滚珠丝杠的另一端与丝杠限位螺帽连接;所述碳纤维增强复合材料管的一端与所述第一杆端螺母连接,另一端与所述第二杆端螺母连接;所述第二杆端螺母与所述滚珠丝杠螺母连接;所述微行程开关座设置在所述第二杆端螺母和所述滚珠丝杠螺母之间,并与所述第二杆端螺母和所述滚珠丝杠螺母连接,所述微行程开关与所述微行程开关座连接,所述微行程开关触头与所述微驱动器连接,所述微驱动器121与所述主动杆座连接;
所述第一杆端螺母用于与另一主节点连接。
2.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述微驱动器由微行星减速箱、微伺服电机和编码器依次串联而成。
3.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述微驱动器的直径小于16mm、长度小于50mm。
4.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述十字轴连接件通过长轴螺丝、短轴螺丝和滑动轴承与所述U型座的两个耳板连接,所述U型被动杆连接件通过所述长轴螺丝和两个所述滑动轴承垂直连接于所述十字轴连接件,如此连接构成万向铰。
5.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述主动杆座的上下两端的所述定位螺丝分别穿过各自对应的所述主动杆座的端承面中心圆孔,依次中心连接所述第一滑动垫圈、所述节点端板、所述第二滑动垫圈、所述U型座、所述第三滑动垫圈和所述平头扩展螺帽。
6.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述第一杆端螺母和所述第二杆端螺母与所述碳纤维增强复合材料管的连接为胶接,胶接面设置有圆环状螺纹,用于提高胶的接触面和胶剪切强度。
7.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述主节点关于中心上下对称。
8.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述主动杆座的主体呈圆筒槽形,所述主动杆座的一侧面为平面,所述平面的中心具有用于连接所述主动杆的圆孔和均布孔;所述主动杆座的另外两侧面呈圆弧形,并构成U型槽;所述主动杆座的上下两个端部具有用于连接所述主节点框体的中心圆孔和凸缘。
9.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述节点端板具有两个凸耳,所述主动杆连接板和所述节点承板分别与所述节点端板的所述两个凸耳连接,所述两个凸耳之间的夹角为150°,使所述节点端板的定位角为150°。
10.如权利要求1所述的八面体桁架单元变几何桁架一体化主动杆和主节点,其特征在于,所述U型被动杆连接件用于与被动杆连接,所述U型被动杆连接件具有定位孔,所述U型被动杆连接件通过所述定位孔与所述被动杆连接,所述定位孔之间的夹角成60°,所述定位孔的角定位线角点位于所述U型被动杆连接件的转轴中心。
说明书
技术领域
本发明涉及一种变几何桁架主动杆和主节点,尤其涉及一种八面体桁架单元变几何桁架主动杆和主节点,属于结构机构工程技术领域。
背景技术
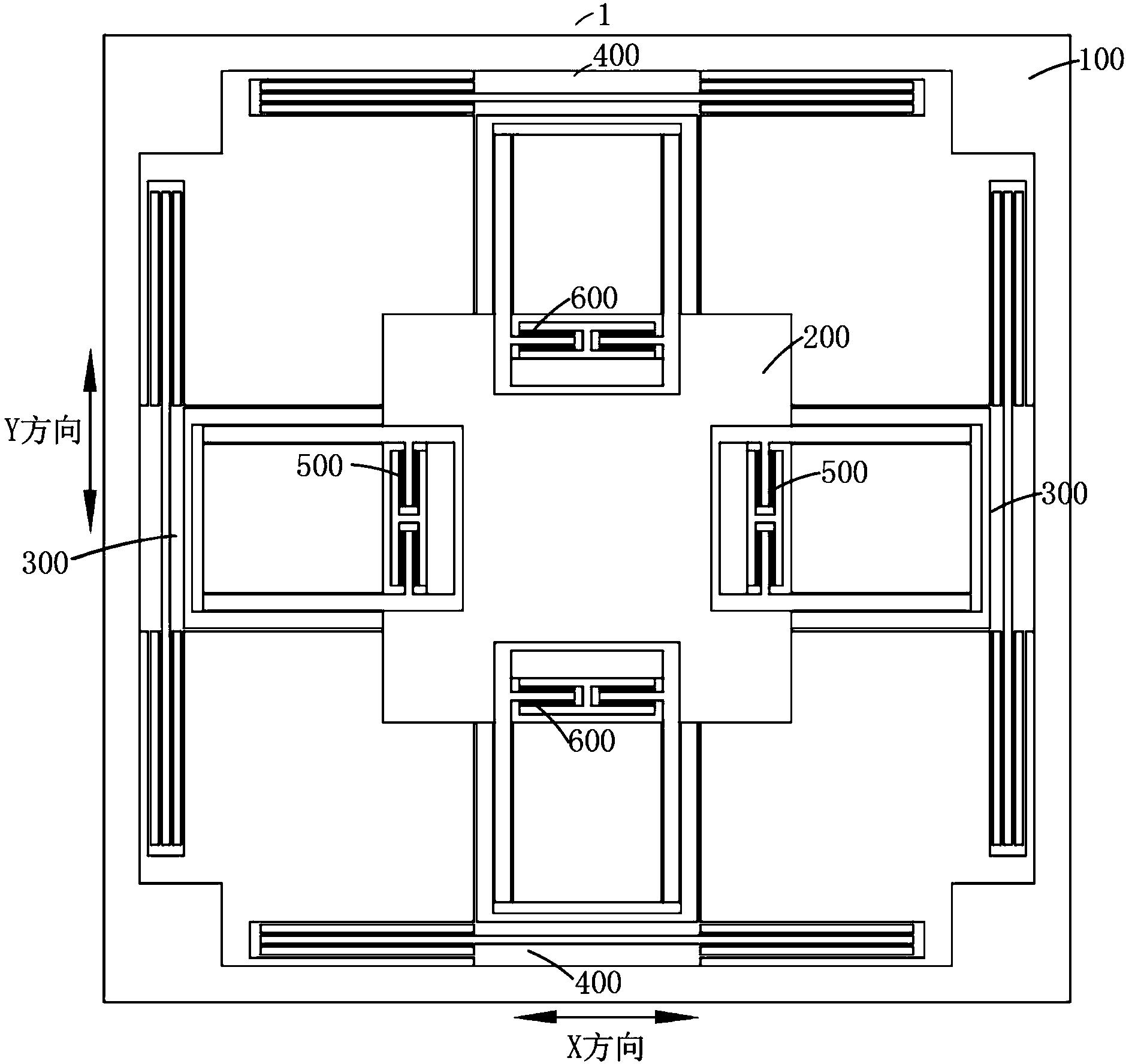
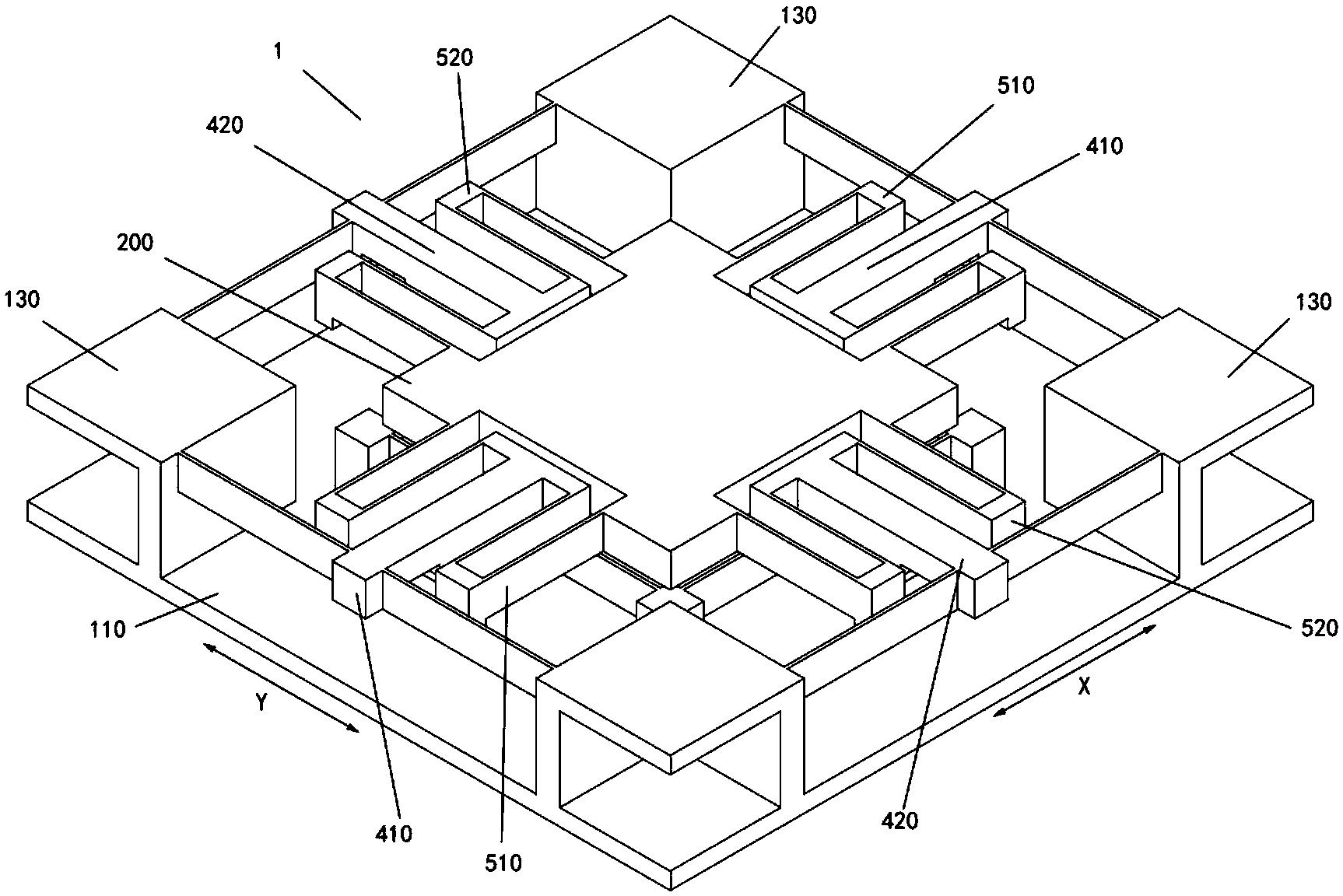
八面体桁架单元由12根杆、6个节点构成空间恰定体系,既无超静定也无内部机构,因此,八面体桁架单元是构造大型复杂结构体系、空间伸展机构、操控机构的有效基本桁架单元。当八面体桁架单元各面边棱长相等时称为正八面体桁架单元。八面体桁架单元六个侧棱设置作动器为主动杆,此为著名的Stewart平台,主动杆可低速大幅伸缩或快速微小伸缩,用于跟踪机构、减振隔振机构。八面体桁架单元顶或底面三棱设置作动器为主动杆,此为变几何桁架单元(Variable Geometry Truss,VGT)。变几何桁架单元串联可构成伸展臂或操控机构,可在中部各层或间隔一层设置作动器成为主动杆、侧棱全定长为被动杆、顶和底为定长杆,以较少作动器实现机构灵活、运动空间大、收纳率大,结构机构重量轻、刚度大。
陈务军、关富玲、陈向阳等著的“正八面体单元伸展臂研究”(宇航学报,1999,20(2):41-47)研究了正八面体桁架单元机构几何分析方法与特征;
陈务军、董石麟、付功义等著的“一高刚性同步展开空间伸展臂设计研究”(2000年中国博士后学术大会论文集,北京:科学出版社)研究了三棱桁架构成高刚性同步伸展的伸展臂;
陈务军、付功义、何艳丽等著的“八面体桁架单元及其派生系所构成的空间伸展臂”(上海交通大学学报(自然科学版),2001,35(4):509-513)研究了正八面体桁架单元特征、八面桁架单元衍生单元及构成伸展臂,以及基本结构特性分析;
CHEN Wu-jun、LUO Yao-zhi、FU Gong-y等著的“A study on space masts based on octahedral truss family”(International Journal of Space Structures,2001,16(1):19-26)研究了八面体桁架单元系的几何、结构特征;
CHEN Wu-jun、LUO Yao-zhi、FU Gong-yi著的“Design conception and deployment simualation for a highly synchronized extendable/retractable space mast”(International Journal of Space Structures,2001,16(4):261-269)研究了同步伸展臂结构机构、节点实现、展开动力学分析方法等;
陈务军、张淑杰著的“空间可展结构体系与分析导论”(中国宇航出版社,2006.3)研究介绍了包含八面体桁架单元的展开结构体系与分析理论;
Stephen Oliver Oikawa著的“Design and Construction of a four-Bay Variable-Geometry-Truss Manipulator”(University of Toronto,1995)研制了以串联转动副构成节点系的八面体单元变几何桁架,并进行了运动学、运动力学分析理论研究;
Luis M.Macareno、Josu Agirrebeitia、Carlos Angulo等著的“FEM subsystem replacement techniques for strength problems in variable geometry trusses”(Finite Elements in Analysis and Design,2008,44:346-357)研制了八面体桁架单元样机、提出了紧凑型组合节点、进行了非线性分析与试验研究。
这些研究均表明八面体桁架单元变几何桁架主动杆存在伸缩比小、构造复杂、精度低等缺点。
授权专利号为201310150753.6的中国专利“八面体桁架单元变几何桁架主动杆”,但其电机尺寸大、构造复杂、功率大、推力小、节点大、冲击大。
申请号为201410223230.4的中国专利“一种八面体桁架单元变几何桁架主动杆”,但其与主节点仍相对独立连接,整体长度较大,小型化和提高收缩比困难。
授权专利号为201310153044.3的中国专利“八面体桁架单元变几何桁架主动节点”公开了一种八面体桁架单元变几何桁架主动节点,但该节点与上下被动杆连接的零件运动耦合,导致各层被动杆运动出现不平顺和奇异点,零件形式多。
申请号为201410217693.X的中国专利“八面体桁架单元变几何桁架主动节点”,但其连接被动杆偏心,导致动力模型不准确,且存在一个旋转冗余度,以及与主动杆相对独立连接使小型化和提高收缩比困难、一体化程度低。
发明内容
有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种具有高伸缩率、轻质、简洁、高刚度、高精度、无运动冗余、低功率、尺寸小、一体化集成融合度高的八面体桁架单元变几何桁架一体化主动杆和主节点。
为实现上述目的,本发明提供了一种八面体桁架单元变几何桁架一体化主动杆和主节点,其结构包括主动杆和与所述主动杆相连的主节点;
所述主节点包括主动杆座、主节点框体、U型座、十字轴连接件、U型被动杆连接件、平头扩展螺帽、主动杆端连接螺栓、第一球轴承、第二球轴承、第一滑动垫圈、第二滑动垫圈、第三滑动垫圈、滑动轴承;
所述主动杆包括微驱动器、滚珠丝杠螺母、滚珠丝杠、碳纤维增强复合材料管、第一杆端螺母、第二杆端螺母、微行程开关、微行程开关触头、微行程开关座、丝杠限位螺帽;
其中,所述主动杆座设置在所述主节点框体中,所述主节点框体包括主动杆连接板、节点承板和节点端板,所述主动杆连接板和所述节点承板设置在所述主动杆座的侧面,所述主动杆连接板的两端分别与所述节点端板连接,同时所述节点承板的两端分别与所述节点端板连接,从而形成所述主节点框体;所述主动杆座的上下两端分别通过定位螺丝与所述节点端板连接,所述节点端板的上下两端分别与所述第一滑动垫圈和所述第二滑动垫圈连接,所述节点端板的中心内嵌置有所述第一球轴承;所述U型座的中心内连接有所述第三滑动垫圈,并嵌置有所述第二球轴承;所述U型座连接、所述U型被动杆连接件与所述十字轴连接件连接并构成万向铰;所述主动杆端连接螺栓与所述主动杆连接板连接,并穿过所述主动杆连接板连接到所述主动杆,使所述主动杆与所述主动杆座的侧面连接;
所述滚珠丝杠的一端与所述微驱动器连接,并且所述滚珠丝杠上穿套所述滚珠丝杠螺母,所述滚珠丝杠的另一端与丝杠限位螺帽连接;所述碳纤维增强复合材料管的一端与所述第一杆端螺母连接,另一端与所述第二杆端螺母连接;所述第二杆端螺母与所述滚珠丝杠螺母连接;所述微行程开关座设置在所述第二杆端螺母和所述滚珠丝杠螺母之间,并与所述第二杆端螺母和所述滚珠丝杠螺母连接,所述微行程开关与所述微行程开关座连接,所述微行程开关触头与所述微驱动器连接,所述微驱动器121与所述主动杆座连接;
所述第一杆端螺母用于与另一主节点连接。
进一步地,所述微驱动器由微行星减速箱、微伺服电机和编码器依次串联而成。
进一步地,所述微驱动器的直径小于16mm、长度小于50mm。
进一步地,所述十字轴连接件通过长轴螺丝、短轴螺丝和滑动轴承与所述U型座的两个耳板连接,所述U型被动杆连接件通过所述长轴螺丝和两个所述滑动轴承垂直连接于所述十字轴连接件,如此连接构成万向铰。
进一步地,所述主动杆座的上下两端的所述定位螺丝分别穿过各自对应的所述主动杆座的端承面中心圆孔,依次中心连接所述第一滑动垫圈、所述节点端板、所述第二滑动垫圈、所述U型座、所述第三滑动垫圈和所述平头扩展螺帽。
进一步地,所述第一杆端螺母和所述第二杆端螺母与所述碳纤维增强复合材料管的连接为胶接,胶接面设置有圆环状螺纹,用于提高胶的接触面和胶剪切强度。
进一步地,所述主节点关于中心上下对称。
进一步地,所述主动杆座的主体呈圆筒槽形,所述主动杆座的一侧面为平面,所述平面的中心具有用于连接所述主动杆的 圆孔和6个 均布孔;所述主动杆座的另外两侧面呈圆弧形,并构成U型槽;所述主动杆座的上下两个端部具有用于连接所述主节点框体的 中心圆孔和 凸缘。
进一步地,所述节点端板具有两个凸耳,所述主动杆连接板和所述节点承板分别与所述节点端板的所述两个凸耳连接,所述两个凸耳之间的夹角为150°,使所述节点端板的定位角为150°。
进一步地,所述U型被动杆连接件用于与被动杆连接,所述U型被动杆连接件具有定位孔,所述U型被动杆连接件通过所述定位孔与所述被动杆连接,所述定位孔之间的夹角成60°,所述定位孔的角定位线角点位于所述U型被动杆连接件的转轴中心。
进一步地,所述定位螺丝的 的螺栓段的长度与被连接的所述第一滑动垫圈、所述节点端板、所述第二滑动垫圈、所述U型座和所述第三滑动垫圈的厚度之和一致,以控制所述定位螺丝的定位和预紧;所述定位螺丝的螺丝段细牙与 的所述平头扩展螺帽螺纹连接。
本发明的八面体桁架单元变几何桁架一体化主动杆和主节点充分利用主动杆、主动杆座、主动杆连接板、U型座、十字轴连接件、U型被动杆连接件、节点承板、节点端板、定位螺丝、滑动轴承、滑动垫圈特点,实现八面体桁架单元变几何桁架一体化主动杆和主节点的高伸缩率、轻质、简洁、高刚度、高精度、低功率、无运动冗余、小尺寸、小冲击,可应用于航天空间可展结构机构、操纵机构、跟踪机构,以及工业控制机构。
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
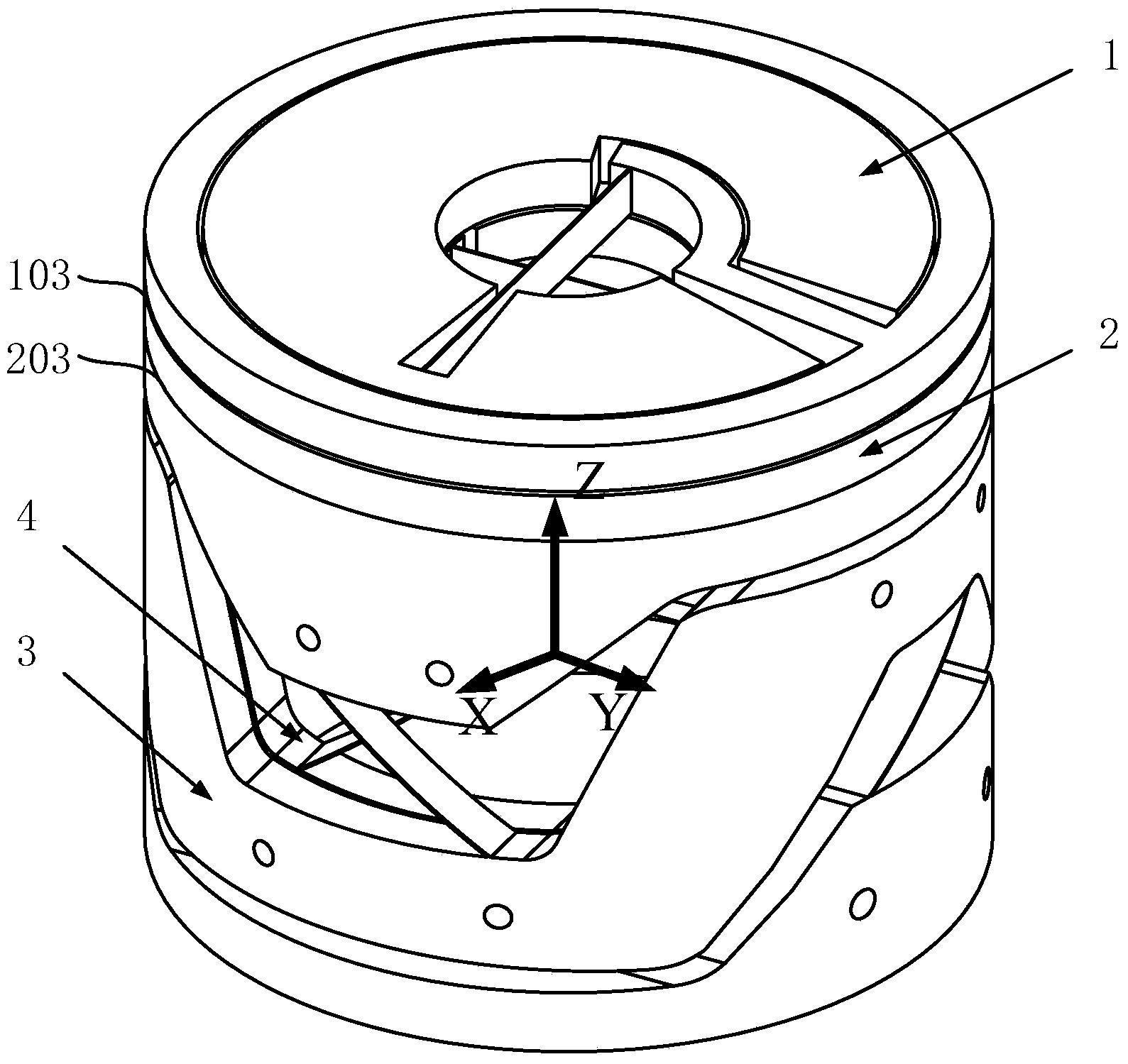
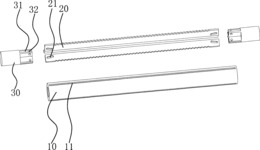
图1是本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的一个三维分解视图;
图2是本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的主动杆的一个三维分解视图;
图3是本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的主动杆的一个正视图;
图4是本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的主动杆座的一个正视图;
图5是图4中的主动杆座的剖视图;
图6是本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的U型座的一个三维视图;
图7是本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的十字轴连接件的一个三维视图;
图8为本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的节点端板的剖视图;
图9为本发明的一个较佳实施例的八面体桁架单元变几何桁架一体化主动杆和主节点的U形被动杆连接件的剖视图。
具体实施方式
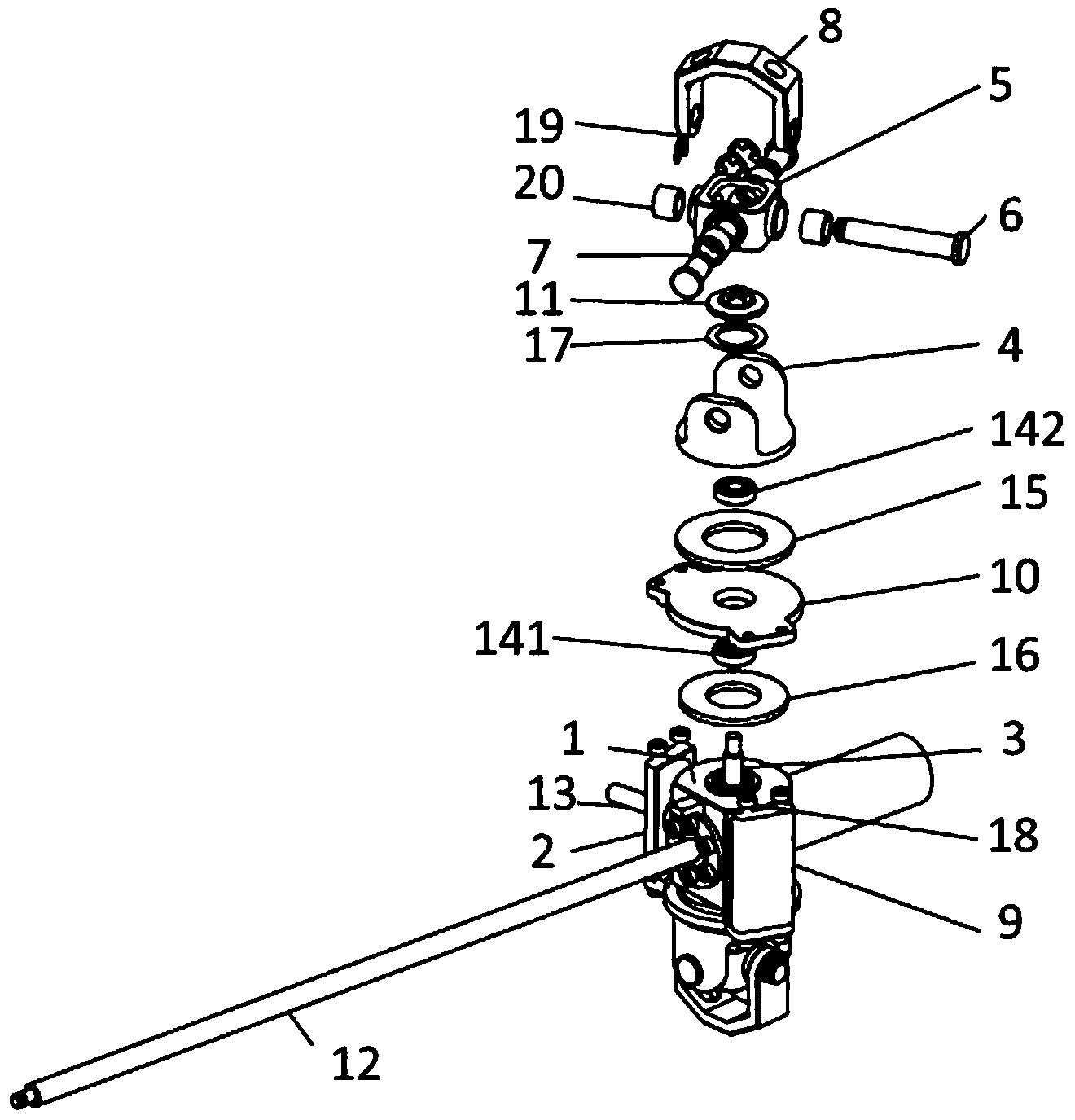
如图1所示,本发明的一个较佳实施例提供了一种八面体桁架单元变几何桁架一体化主动杆和主节点,其结构包括主动杆12和与主动杆相连的主节点,主节点包括主动杆座1(参见图4和图5)、主节点框体、定位螺丝3、U型座4、十字轴连接件5、长轴螺丝6、短轴螺丝7、U型被动杆连接件8、平头扩展螺帽11、主动杆端连接螺栓13、第一球轴承141、第二球轴承142、第一滑动垫圈15、第二滑动垫圈16、第三滑动垫圈17、细螺丝18、卡环19、滑动轴承20。
其中,主动杆座1设置在主节点框体中,主节点框体包括主动杆连接板2、节点承板9和节点端板10,主动杆连接板2和节点承板9设置在主动杆座1的侧面,主动杆连接板2的两端分别通过细螺丝18与节点端板10连接,同时节点承板9的两端分别通过两个细螺丝18与节点端板10连接,从而形成主节点框体。其中,节点端板10具有两个凸耳110,主动杆连接板2和节点承板9分别与节点端板10的两个凸耳110连接,两个凸耳110之间的夹角111为150°,从而使节点端板10的定位角为150°(参见图8)。主动杆座1的上下两端分别通过定位螺丝3与节点端板10连接,每个定位螺丝3穿过各自对应的主动杆座1的端承面中心圆孔,依次中心连接第一滑动垫圈15、节点端板10、第二滑动垫圈16、U型座4(参见图6)、第三滑动垫圈17和平头扩展螺帽11。节点端板10的上下两端分别与第一滑动垫圈15和第二滑动垫圈16连接,节点端板10的中心内嵌置有第一球轴承141。U型座4的中心内连接有第三滑动垫圈17,并嵌置有第二球轴承142。
十字轴连接件5(参见图7)通过一个长轴螺丝6、两个短轴螺丝7和四个滑动轴承20与U型座4的两个耳板连接,U型被动杆连接件8通过长轴螺丝6和两个滑动轴承20垂直连接于十字轴连接件5,如此连接构成万向铰。本实施例的U型被动杆连接件8用于与被动杆连接,U型被动杆连接件8具有定位孔81,U型被动杆连接件8通过定位孔81与被动杆连接,定位孔81之间的夹角82成60°,定位孔81的角定位线角点位于U型被动杆连接件8的转轴中心(参见图9)。
本实施例中,主节点关于中心上下对称,主动杆端连接螺栓13与主动杆连接板2连接,并穿过主动杆连接板2连接到主动杆12,使主动杆12与主动杆座2的侧面连接。
如图2~3所示,本发明的一个较佳实施例提供了一种八面体桁架单元变几何桁架一体化主动杆和主节点的主动杆12,其结构包括微驱动器121、滚珠丝杠螺母122、滚珠丝杠123、碳纤维增强复合材料管124、第一杆端螺母125、第二杆端螺母126、微行程开关127、微行程开关触头128、微行程开关座129、丝杠限位螺帽130、卡环131、细螺丝132。
其中,滚珠丝杠123的一端与微驱动器121的轴端法兰连接,并且滚珠丝杠123上穿套滚珠丝杠螺母122,滚珠丝杠123的另一端与丝杠限位螺帽130和卡环131连接。碳纤维增强复合材料管124的一端与第一杆端螺母125连接,另一端与第二杆端螺母126连接。较佳地,第一杆端螺母125和第二杆端螺母126与碳纤维增强复合材料管124的连接为胶接,胶接面设置有圆环状螺纹,用于提高胶的接触面和胶剪切强度。第二杆端螺母126与滚珠丝杠螺母122连接。微行程开关座129设置在第二杆端螺母126和滚珠丝杠螺母之间,并与第二杆端螺母126和滚珠丝杠螺母122连接,微行程开关127与微行程开关座129连接,微行程开关触头128通过由细螺丝132与微驱动器121的轴端法兰连接,微驱动器121的轴端法兰与主动杆座连接。本实施例的第一杆端螺母125用于与另一主节点连接,具体为与另一主节点中的主动杆连接板和主动杆端连接螺栓连接。
本实施例中,微驱动器121由微行星减速箱、微伺服电机和编码器依次串联而成,微驱动器的直径小于16mm、长度小于50mm。
本实施例中,主动杆座1的主体呈圆筒槽形,其一侧面为平面,该平面的中心具有用于连接主动杆12的 圆孔101和6个 均布孔102;主动杆座1的另外两侧面呈圆弧形,并构成U型槽;主动杆座1的上下两个端部具有用于连接主节点框体的 中心圆孔103和 凸缘104。
本实施例中,定位螺丝3的 的螺栓段的长度与被连接的第一滑动垫圈15、节点端板10、第二滑动垫圈16、U型座4和所述第三滑动垫圈17的厚度之和一致,以控制定位螺丝3的定位和预紧;定位螺丝3的螺丝段细牙与 的平头扩展螺帽11螺纹连接。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
八面体桁架单元变几何桁架一体化主动杆和主节点专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0