










专利摘要
一种非接触式气动混合电主轴支撑系统,其特征在于:设有截面相同的凸圆台的主轴,设有与凸圆台对应的凹形内腔的上盖板与下盖板,压电纤维层分别固定在上盖板与下盖板的底面,上盖板与下盖板表面设有均布的进气孔。本实用新型的支撑系统将超声悬浮与气体静压支撑耦合,利用逆压电效应和气体静压效应,对主轴与压力箱间隙的气膜进行二次压力分配,通过控制压电纤维振动参数改变间隙内气膜的挤压状态。本实用新型通过改变主轴的结构,使气膜产生的悬浮力可分解为沿轴线方向的止推力和垂直于轴线方向的承载力,使电主轴在高速运转过程同时具有轴向和径向的稳定性;本实用新型的主轴支撑系统承载力大,有较高的回转精度,适用于超精密加工,航空航天等精密领域。
权利要求
1.一种非接触式气动混合电主轴支撑系统,其特征在于:设有截面相同的等腰梯形的至少两个凸圆台(4)的主轴(3);设有与所述主轴(3)等腰梯形截面相对应的凹形内腔(5)并在侧面设有带螺孔的翻边(7)的上盖板(1)与下盖板(2),压电纤维层(8)分别固定在所述上盖板(1)与下盖板(2)凹形内腔(5)的底面;设有均布的进气孔(9)分别穿过所述上盖板(1)与下盖板(2)以及压电纤维层(8);所述上盖板(1)与下盖板(2)分别被穿过所述翻边(7)上螺孔的螺栓(6)在所述主轴(3)上两个凸圆台(4)处紧固形成两个结构相同的压力箱;所述压力箱内的上盖板(1)与下盖板(2)的压电纤维层(8)表面与所述的凸圆台(4)之间设有间隙(10)。
2.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述主轴(3)上的凸圆台(4)的倾角α为45°-90°。
3.根据权利要求2所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述主轴(3)上所述的凸圆台(4)的倾角α的最佳值为45°。
4.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述主轴(3)上的凸圆台(4)的截面为等腰三角形。
5.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述主轴(3)上的凸圆台(4)的截面为圆形。
6.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述凹形内腔(5)的截面为等腰三角形。
7.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述凹形内腔(5)的截面为圆形。
8.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述压力箱内所述的上盖板(1)与下盖板(2)的压电纤维层(8)表面与所述的凸圆台(4)之间设有间隙(10)的数值范围为50-100μm。
9.根据权利要求1所述的一种非接触式气动混合电主轴支撑系统,其特征在于:所述压力箱内所述的上盖板(1)与下盖板(2)的压电纤维层(8)表面与所述的凸圆台(4)之间设有间隙(10)的最佳数值为50μm。
说明书
技术领域
本实用新型专利涉及一种电主轴旋转支撑系统。
背景技术
近年来,随着工业现代化的高速发展,对超精密机床和高速机床等需求不断增长,如国防领域用于加工大型光学透镜的金刚石车床以及电子工业领域用于加工微小非球面光学透镜的超精密磨床和印制电路板钻孔用的高速钻床等,同时航空航天等超精密加工领域对机床的性能也提出更高的要求,机床主轴的支撑方式影响着整个轴系的旋转精度及零件的加工精度。目前国内外在超精密加工中的非接触电主轴支撑方式普遍采用空气静压支撑,但是这种支撑方式稳定性差,会发生气锤振动现象和自激涡动导致主轴损伤,因此需要设计一种稳定性好,旋转精度高的新型电主轴支撑系统。
本实用新型的非接触式气动混合电主轴支撑系统将气动悬浮与超声悬浮混合,不存在电磁辐射,采用压电纤维和高压气源作为驱动装置,通过压电纤维高频振动产生挤压膜效应,通过高压气源产生气体静压效应,实现对主轴的悬浮支撑;改变主轴的结构,实现同时对主轴提供轴向止推力和径向承载力,提高主轴的回转精度;通过控制高频振动的振动参数,改变输入高压气体的挤压状态,形成可控制的悬浮力,实现对电主轴悬浮状态的智能监测,提高支撑系统的稳定性。新型电主轴支撑系统承载能力大,精度高,稳定性好。
实用新型内容
为解决电主轴在工作过程中无法保证较高的回转精度和较高的稳定性的问题,本实用新型提出以下技术方案:一种非接触式气动混合电主轴支撑系统,其特征在于:设有截面相同的等腰梯形的至少两个凸圆台的主轴。主轴上凸圆台的截面还可以为等腰三角形或者圆形。设有与主轴等腰梯形截面相对应的凹形内腔并在侧面设有带螺孔的翻边的上盖板与下盖板。凹形内腔的截面还可以为等腰三角形或者圆形。压电纤维层分别固定在上盖板与下盖板凹形内腔的底面。设有均布的进气孔分别穿过上盖板与下盖板以及压电纤维层。上盖板与下盖板分别被穿过翻边上螺孔的螺栓在主轴上两个凸圆台处紧固形成两个结构相同的压力箱。压力箱内的上盖板与下盖板的压电纤维层表面与凸圆台之间设有间隙。主轴上的凸圆台的倾角α为45°-90°,最佳值为45°。压电纤维层表面与凸圆台之间设有间隙的数值范围为50-100μm,最佳值为50μm。
在本实用新型中,主轴的轴线方向上至少设有两个截面相同的等腰梯形的凸圆台,并且在侧面设有带螺孔的翻边的上盖板和下盖板设有与主轴的等腰梯形截面相对应的凹形内腔,能够使本实用新型在主轴静止时仍具有支撑作用。由于在本实用新型的主轴上设有截面相同的等腰梯形的凸圆台,使压电纤维高频振动产生的悬浮力被分解为沿主轴轴线方向的轴向止推力和垂直于主轴轴线方向的径向承载力,使主轴在高速旋转过程中保持稳定。由于在上盖板,下盖板表面设有多个进气孔,通入高压气体时容易发生气锤不稳定现象,使主轴发生剧烈振动,本实用新型将超声悬浮与气体静压悬浮相耦合,对通入的气体进行二次压力分配,使电主轴支撑系统中主轴上的凸圆台与上盖板和下盖板底面的压电纤维层间隙内的气膜均匀化,同时通过控制高频振动参数,形成可控制的悬浮力及应力分布状态。本实用新型的电主轴支撑系统通过改变间隙内气膜的挤压状态,从而改变支撑电主轴的悬浮力,实现对电主轴悬浮状态的智能监测。非接触式气动混合电主轴支撑系统克服了超声悬浮和气动悬浮的缺点,减弱了气锤现象,提高支撑系统的稳定性和回转精度。
采用上述技术方案的一种非接触式气动混合电主轴支撑系统,利用逆压电效应和气体静压效应,通过改变主轴的结构,同时改变从进气孔流入主轴与上盖板和下盖板底面的压电纤维层间隙内的气体挤压状态,使设置在主轴上的凸圆台的各端面具有稳定的悬浮力,实现了对整个主轴轴向和径向的稳定支撑。本实用新型的电主轴支撑系统工作稳定性好,能够通过控制压电纤维层的振动参数来调节对电主轴的悬浮力,从而可以实时监控电主轴的悬浮状态,承载能力大,结构简单便于加工,适用于超精密加工,航空航天及其它精密领域。
附图说明
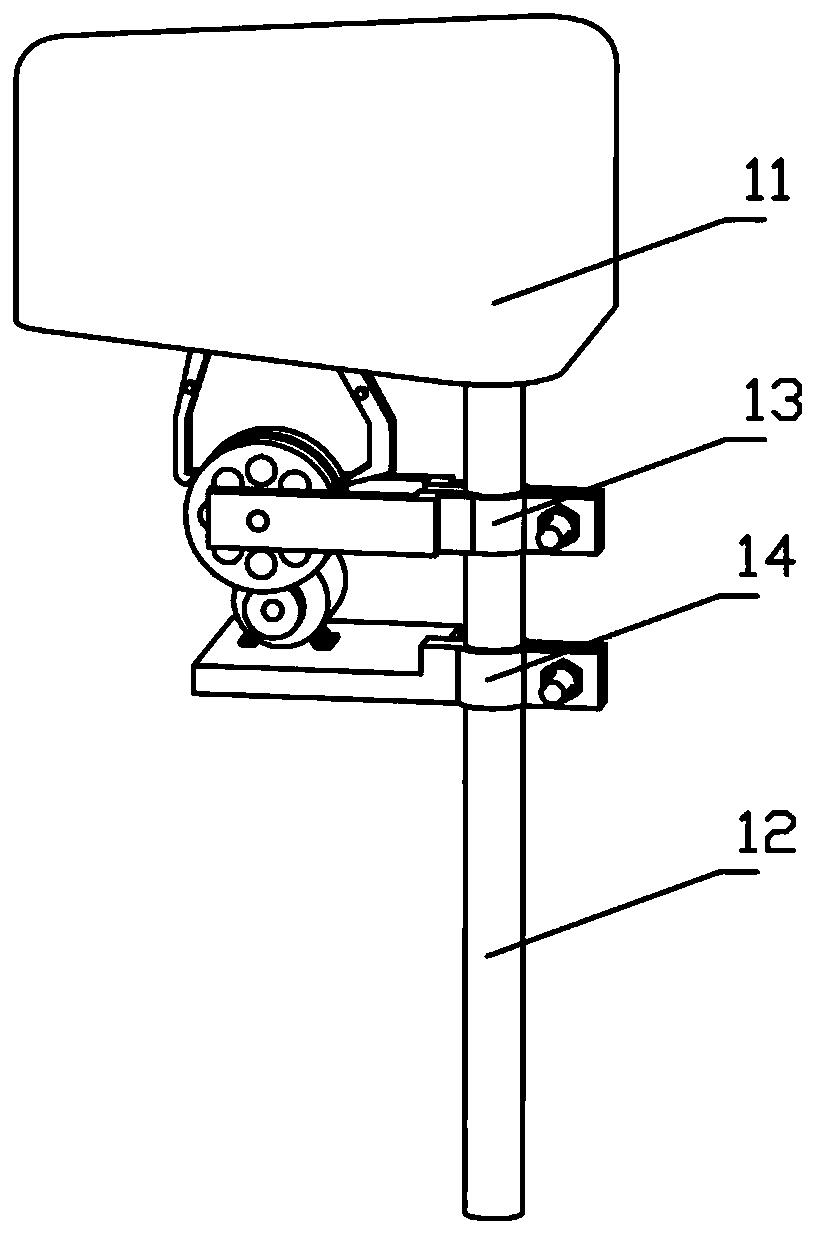
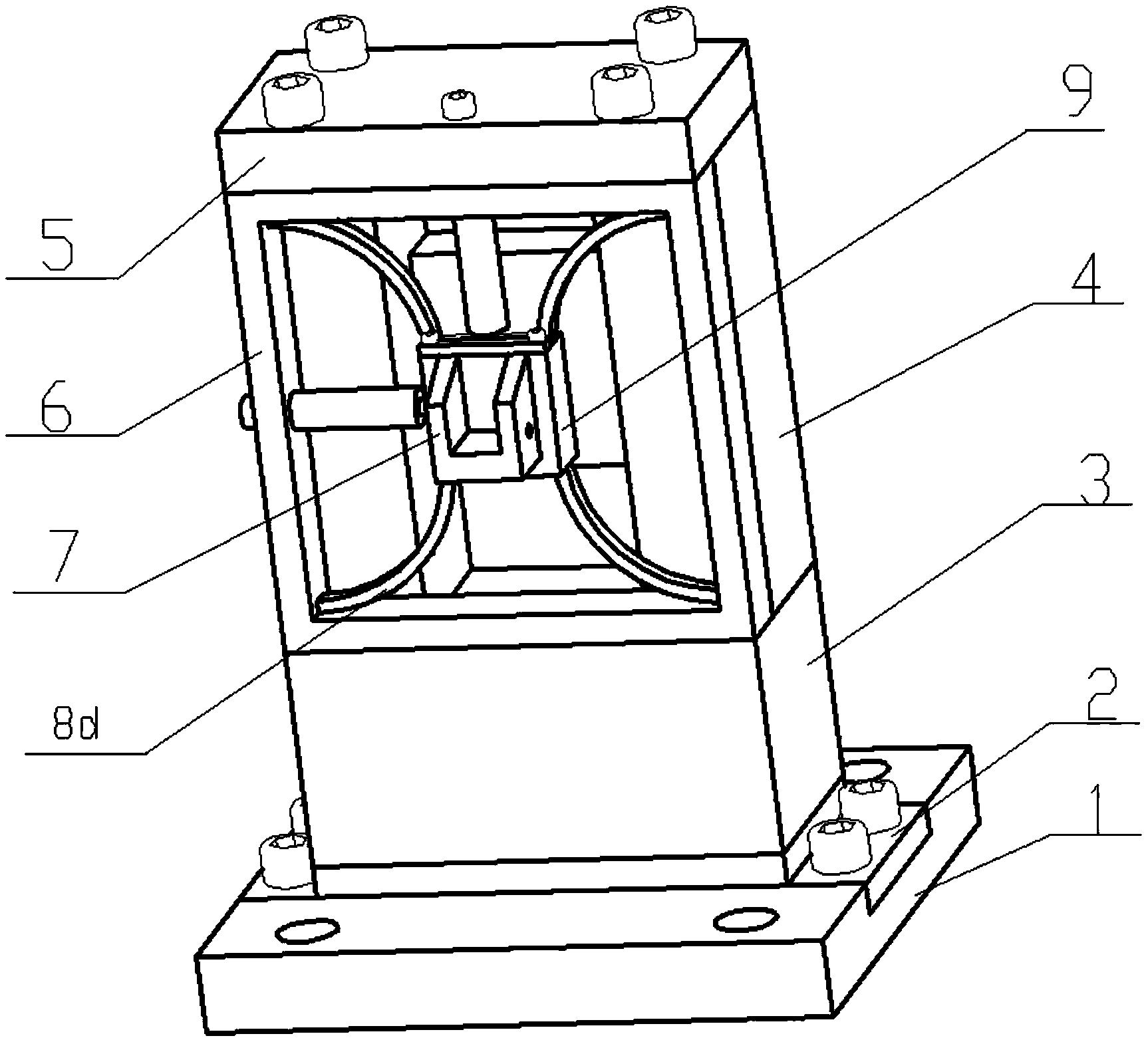
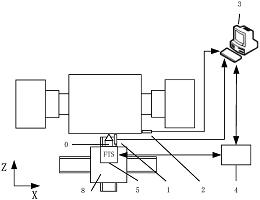
图1为一种非接触式气动混合电主轴支撑系统的立体图。
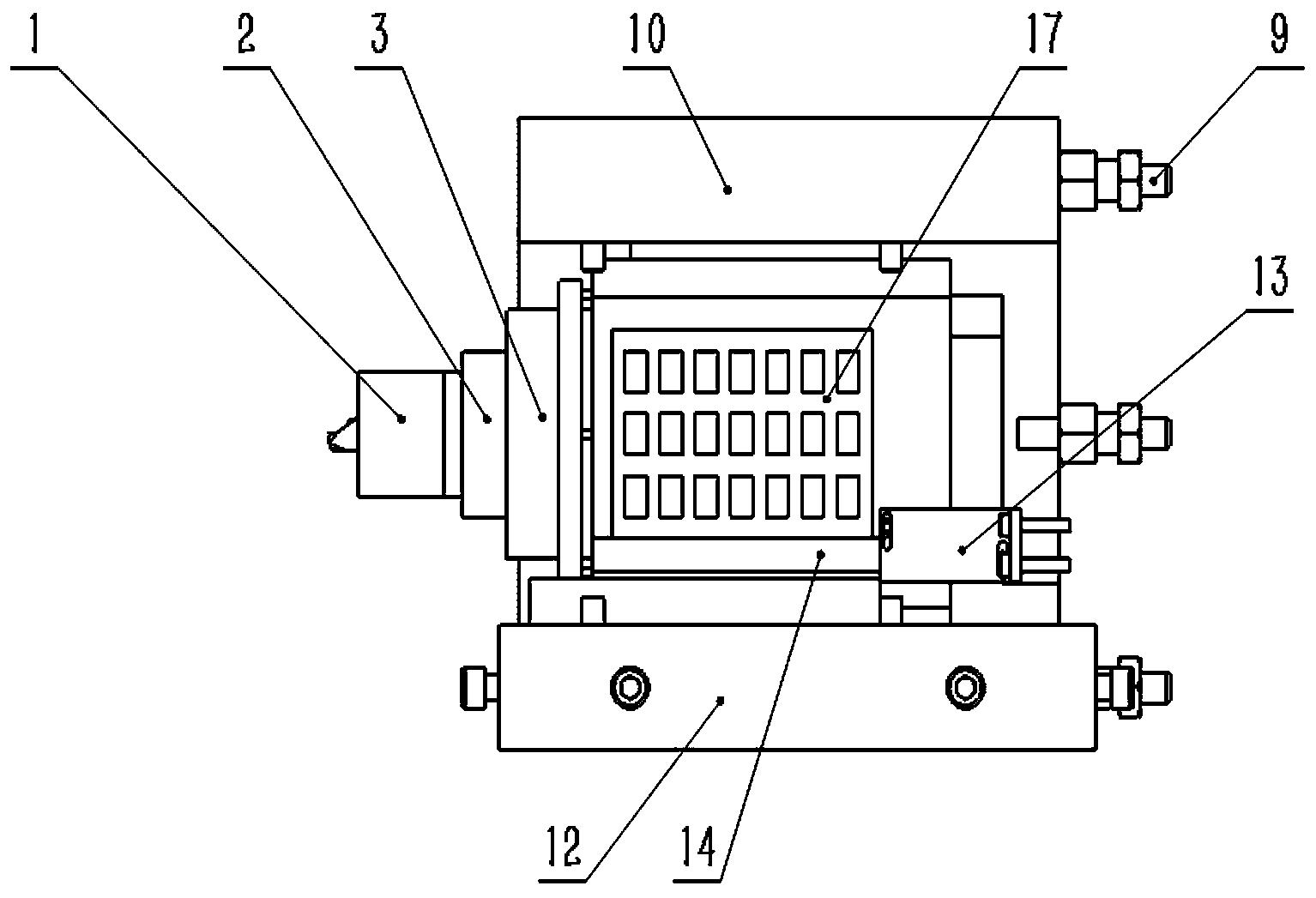
图2为图1的主视图。
图3为图2的俯视图。
图4为图2的左视图。
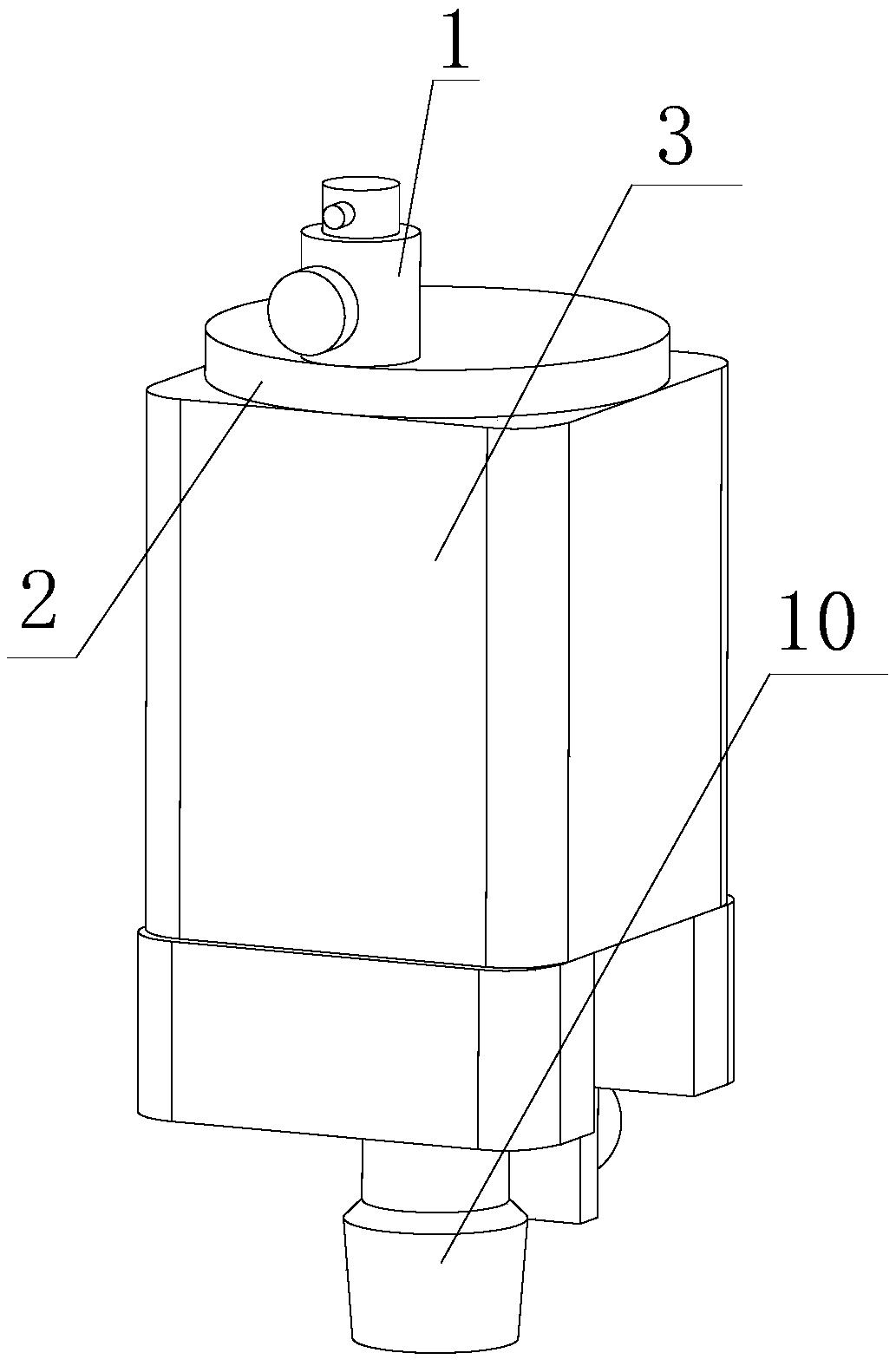
图5为主轴的立体图。
图6为图5的主视图。
图7为图3的A-A剖视图。
图8为图7的I部放大图。
图中:1、上盖板,2、下盖板,3、主轴,4、凸圆台,5、凹形内腔,6、螺栓,7、翻边,8、压电纤维层,9、进气孔,10、间隙。
具体实施方式
图1是一种非接触式气动混合电主轴支撑系统,图8是其内部详细构造。整个支撑系统包括上盖板1,下盖板2,主轴3,压电纤维层8。支撑系统中设有包含有至少两个截面相同的等腰梯形的凸圆台4的主轴3。设有与主轴3上等腰梯形截面相对应的凹形内腔5且在侧面设有带螺孔的翻边7的上盖板1和下盖板2。设有压电纤维层8分别固定在上盖板1和下盖板2的凹形内腔5的底面。设有均布的进气孔9分别穿过上盖板1与下盖板2以及压电纤维层8。上盖板1与下盖板2分别被穿过所述翻边7上螺孔的螺栓6在主轴3上两个凸圆台4处紧固形成两个结构相同的压力箱。凸圆台4与上盖板1和下盖板2的压电纤维层8之间设有间隙10。至少两个压力箱固定放置在同一水平面上。
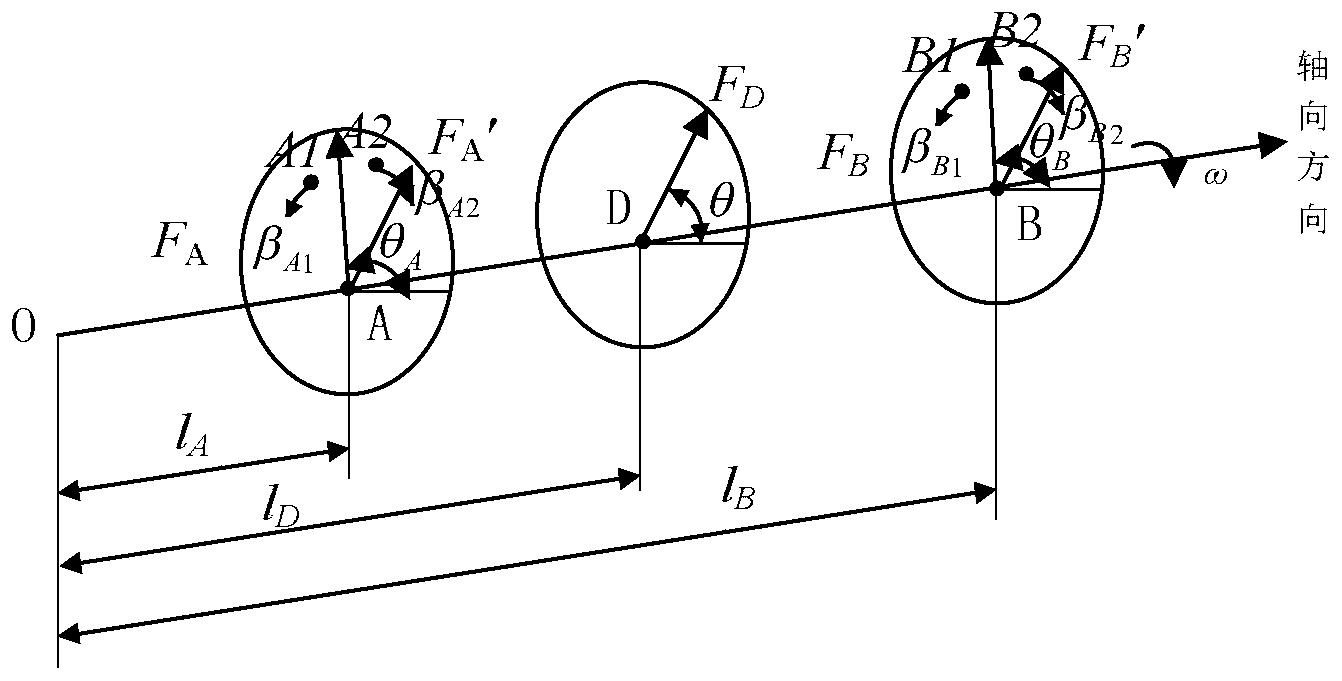
在本实用新型中,由于在主轴3轴线方向上设有至少两个凸圆台4,同时压力箱上盖板与下盖板内的凹形内腔5与主轴3上的凸圆台4之间设有极小的间隙10,使本实用新型的电主轴支撑系统在主轴3静止时仍具有支撑作用;通过在主轴3上设置的至少两个凸圆台4,改变了压电纤维层8高频振动时产生对主轴3悬浮力的方向,使压电纤维层8产生的悬浮力被分解为沿主轴3轴线方向的轴向止推力和垂直于主轴3轴线方向的径向承载力,使主轴3在高速旋转过程中同时保持轴向和径向的稳定,此时施加在主轴3上的轴向止推力为压力箱上盖板1与下盖板2的凹形内腔5斜面处的压电纤维层8产生悬浮力的水平分力,径向承载力为压力箱上盖板1与下盖板2的凹形内腔5斜面处的压电纤维层8产生悬浮力的竖直分力与所述压力箱上盖板1与下盖板2的凹形内腔5水平面处的压电纤维层8产生悬浮力的合力。本实用新型的电主轴支撑系统中主轴3上的凸圆台4的圆台倾角α可为45°-90°之间的任意角度,此时产生的轴向止推力相对于圆台倾角为0°-45°的圆台产生的轴向止推力大,当圆台倾角α为45°时,主轴支撑系统产生的径向支撑力与轴向支撑力同时达到最大值,使电主轴支撑系统的承载能力达到最大。
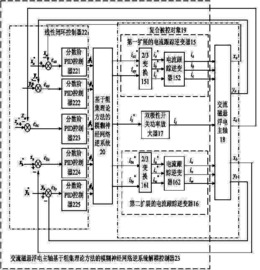
当电主轴支撑系统工作时,对上盖板1,下盖板2表面设置的进气孔9通入高压气体,同时对压电纤维层8输入交流电压,此时在进气孔9通入的高压气体会与压电纤维层8高频振动产生的挤压气膜共同作用在主轴3上的凸圆台4与上盖板1和下盖板2内的凹形内腔5底面的间隙10内,实现超声悬浮与气动悬浮的耦合,经过耦合后的电主轴支撑系统能够对间隙10内的气膜进行二次压力分配,使电主轴支撑系统中主轴上的凸圆台4与上盖板1和下盖板2内的凹形内腔5底面的间隙10内的气膜均匀化。当支撑系统中的主轴3偏向一侧时,由于间隙10变小,使该侧的压电纤维层8产生的悬浮力变大,另一侧的压电纤维层8由于间隙10变大产生的悬浮力变小,主轴3在两侧悬浮力的共同作用下被拉回至支撑系统的中心,形成可控制的悬浮力及应力分布状态;通过改变压电纤维层8高频振动的振动参数,同时改变间隙10内气膜的挤压状态,改变对电主轴的悬浮力,提高整个主轴支撑系统的稳定性。
在本实用新型的电主轴支撑系统中,对于静压气体支撑其半径的间隙一般取主轴3直径的1/1000-1/5000,对于用来支撑电主轴来说,其半径间隙10常取较大值。若间隙10内的压强较小,主轴3不再处于悬浮状态,主轴3与其支撑部件有明显接触,产生振动噪音,并且会引起系统的不稳定,严重时还会发生抱轴研死现象。
综上所述,本实用新型的一种非接触式气动混合电主轴支撑系统,通过改变主轴的结构,利用压电驱动和气体静压悬浮,实现了同时对主轴径向支撑和轴向止推。同时经过气体静压悬浮和超声悬浮的耦合作用后,能够对间隙内气膜进行二次压力分配,使电主轴支撑系统中主轴与压力箱上盖板与下盖板凹形内腔底面的压电纤维层的间隙内的气膜均匀化。通过改变压电纤维层高频挤压的振动参数,改变气膜的挤压状态,形成可控制的悬浮力,同时还可以减弱支撑系统的气锤振动现象,提高电主轴工作的稳定性。本实用新型的电主轴支撑系统工作稳定性好,精度高,承载能力大,结构简单,适用于超精密加工,航空航天及其它精密操作领域。
一种非接触式气动混合电主轴支撑系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0