









专利摘要
本发明涉及实验设备,更具体的说是一种微纳机器人控制系统,包括计算机控制单元、光源组件、光束会聚组件、全反射镜、聚光镜、样品室和光驱动型微纳机器人,所述计算机控制单元控制光源组件发射不同波段的光,不同波段的光依次经过光束会聚组件、全反射镜和聚光镜投射在样品室内驱动样品室内的光驱动型微纳机器人运动,可以用于为光驱动微纳机器人运动实验提供波长可调、单位面积强度足够驱动微纳机器人的稳定的、可控的光,不仅可以驱动微纳机器人运动,还可以控制微纳机器人的运动方向。
权利要求
1.一种微纳机器人控制系统,包括计算机控制单元(1)、光源组件(2)、光束会聚组件(3)、全反射镜(4)、聚光镜(5)、样品室(6)和光驱动型微纳机器人(14),其特征在于:所述计算机控制单元(1)控制光源组件(2)发射不同波段的光,不同波段的光依次经过光束会聚组件(3)、全反射镜(4)和聚光镜(5)投射在样品室(6)内驱动样品室(6)内的光驱动型微纳机器人(14)运动。
2.根据权利要求1所述的一种微纳机器人控制系统,其特征在于:所述光源组件(2)包括光机(9)和滤光片(10),计算机控制单元(1)通过USB口控制光机(9)发出不同的空间结构光,滤光片(10)对光机(9)发出的不同的空间结构光进行过滤获得所需的光。
3.根据权利要求2所述的一种微纳机器人控制系统,其特征在于:所述光束会聚组件(3)包括第一抛物曲面镜(11)和第二抛物曲面镜(12),第一抛物曲面镜(11)和第二抛物曲面镜(12)对光机(9)发出不同的空间结构光进行聚光;光机(9)的发光口、滤光片(10)、第一抛物曲面镜(11)、第二抛物曲面镜(12)和全反射镜(4)的中心位于同一水平线上,光机(9)的发光口、滤光片(10)、第一抛物曲面镜(11)、第二抛物曲面镜(12)和全反射镜(4)之间的距离可调节。
4.根据权利要求1至3任一项所述的一种微纳机器人控制系统,其特征在于:所述微纳机器人控制系统还包括图像传感器(7)和显微镜(8),样品室(6)放置在显微镜(8)的载物台上,图像传感器(7)和显微镜(8)连接,图像传感器(7)和计算机控制单元(1)连接。
5.根据权利要求4所述的一种微纳机器人控制系统,其特征在于:所述图像传感器(7)将显微镜(8)成像到的光驱动型微纳马达运动产生的图像数据传输到计算机控制单元(1)上。
6.根据权利要求1至3任一项所述的一种微纳机器人控制系统,其特征在于:所述投射在样品室(6)上的不同波段的光形成多个按照一定路径运动驱动微纳机器人运动光点(13),多个驱动微纳机器人运动光点(13)分别驱动样品室(6)内设置的多个光驱动型微纳机器人(14)按照驱动微纳机器人运动光点(13)的运动路径进行运动。
7.根据权利要求6所述的一种微纳机器人控制系统,其特征在于:所述驱动微纳机器人运动光点(13)设置有两至三个,驱动微纳机器人运动光点(13)和光驱动型微纳机器人(14)的数量相同。
8.根据权利要求7所述的一种微纳机器人控制系统,其特征在于:每个所述驱动微纳机器人运动光点(13)的光点运动轨迹(15)各不相同,驱动微纳机器人运动光点(13)驱动对应的光驱动型微纳机器人(14)按照对应的光点运动轨迹(15)进行运动。
9.根据权利要求1至3任一项所述的一种微纳机器人控制系统,其特征在于:所述投射在样品室(6)上的不同波段的光形成多个按照一定路径运动驱动微纳机器人运动图案(17),驱动微纳机器人运动图案(17)驱动光驱动型微纳机器人(14)形成光驱动型微纳机器人群(16),驱动微纳机器人运动图案(17)驱动对应的光驱动型微纳机器人群(16)按照驱动微纳机器人运动图案(17)的光驱动型微纳机器人群运动轨迹(18)运动路径进行运动。
10.根据权利要求9所述的一种微纳机器人控制系统,其特征在于:所述计算机控制单元(1)控制多个驱动微纳机器人运动图案(17)进行平移和旋转,多个驱动微纳机器人运动图案(17)分别驱动对应的光驱动型微纳机器人群(16)进行平移和旋转。
说明书
技术领域
本发明涉及实验设备,更具体的说是一种微纳机器人控制系统。
背景技术
纳米、微米级别的运动一直是科学界的一个十分热门的研究领域。微纳机器人是指在外界各种能量光、电、磁、热、化学能等的刺激下,具有运动性能包括转动、翻转、梭动、收缩、聚集等,且尺寸为微米或纳米级的微观器件,相对于传统的微纳颗粒而言,微纳机器人的可控运行的特性使之在应对未来生物临床、环境治理、微纳器械、微纳加工等领域的实际问题时具备明显优势。
在众多的自然能量之中,光可以算是一种微纳机器人控制系统高效清洁的能量,同时它也是一种微纳机器人控制系统推动机器人运动的理想的能源;已经有许多研究小组发现,机器人的远程操控可以通过光来实现;在多种的微纳机器人当中,基于光催化反应的光驱动型微纳机器人是极有吸引力的机器人之一,现有技术中并不存在可以用于为光驱动微纳机器人运动实验提供波长可调、单位面积强度足够驱动微纳机器人的稳定的、可控的光的实验设备。
对于光驱动型微纳机器人,强烈的运动需要高发光能量来支持,在微纳机器人驱动实验中,为了更好地实现微纳机器人的运动控制,需要提供强度可变化,可移动的点光源。
为了要完成预设的生物医学任务,还需要一种微纳机器人控制系统能自主适应的,相互之间能够交流与合作的微纳机器;并且需要在控制微纳机器人集群的情况下,控制微纳机器人群的运动方向。
发明内容
本发明的目的是提供一种微纳机器人控制系统,可以用于为光驱动微纳机器人运动实验提供波长可调、单位面积强度足够驱动微纳机器人的稳定的、可控的光,不仅可以驱动微纳机器人运动,还可以控制微纳机器人的运动方向。
本发明的目的通过以下技术方案来实现:
一种微纳机器人控制系统,包括计算机控制单元、光源组件、光束会聚组件、全反射镜、聚光镜、样品室和光驱动型微纳机器人,所述计算机控制单元控制光源组件发射不同波段的光,不同波段的光依次经过光束会聚组件、全反射镜和聚光镜投射在样品室内驱动样品室内的光驱动型微纳机器人运动。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述光源组件包括光机和滤光片,计算机控制单元通过USB口控制光机发出不同的空间结构光,滤光片对光机发出的不同的空间结构光进行过滤获得所需的光。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述光束会聚组件包括第一抛物曲面镜和第二抛物曲面镜,第一抛物曲面镜和第二抛物曲面镜对光机发出不同的空间结构光进行聚光。光机的发光口、滤光片、第一抛物曲面、第二抛物曲面和全反光镜的中心位于同一水平线上,光机的发光口、滤光片、第一抛物曲面、第二抛物曲面和全反光镜之间的距离可调节。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述微纳机器人控制系统还包图像传感器和括显微镜,样品室放置在显微镜的载物台上,图像传感器和显微镜连接,图像传感器和计算机控制单元连接。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述图像传感器将显微镜成像到的光驱动型微纳马达运动产生的图像数据传输到计算机控制单元上。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述投射在样品室上的不同波段的光形成多个按照一定路径运动驱动微纳机器人运动光点,多个驱动微纳机器人运动光点分别驱动样品室内设置的多个光驱动型微纳机器人按照驱动微纳机器人运动光点的运动路径进行运动。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述驱动微纳机器人运动光点设置有两至三个,驱动微纳机器人运动光点和光驱动型微纳机器人的数量相同,
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述每个驱动微纳机器人运动光点的光点运动轨迹各不相同,驱动微纳机器人运动光点驱动对应的光驱动型微纳机器人按照对应的光点运动轨迹进行运动。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述投射在样品室上的不同波段的光形成多个按照一定路径运动驱动微纳机器人运动图案,驱动微纳机器人运动图案驱动光驱动型微纳机器人形成光驱动型微纳机器人群,驱动微纳机器人运动图案驱动对应的光驱动型微纳机器人群按照驱动微纳机器人运动图案的光驱动型微纳机器人群运动轨迹运动路径进行运动。
作为本技术方案的进一步优化,本发明一种微纳机器人控制系统,所述所述计算机控制单元控制多个驱动微纳机器人运动图案进行平移和旋转,多个驱动微纳机器人运动图案分别驱动对应的光驱动型微纳机器人群进行平移和旋转。
本发明一种微纳机器人控制系统的有益效果为:
本发明一种微纳机器人控制系统,利用光驱动型微纳机器人的对于光的趋向作用,通过计算机控制单元控制光源组件出射不同波段的光,同时调节光源组件、光束会聚组件和全反光镜之间的距离,使光以适当的大小投射样品室上驱动样品室内的光驱动型微纳机器人运动;通过图像传感器将显微镜成像到的光驱动型微纳机器人运动产生的图像数据传输到计算机控制单元上;多个驱动微纳机器人运动光点分别驱动样品室内设置的多个光驱动型微纳机器人按照驱动微纳机器人运动光点的运动路径进行运动;计算机控制单元控制多个驱动微纳机器人运动图案进行平移和旋转,多个驱动微纳机器人运动图案分别驱动对应的光驱动型微纳机器人群进行平移和旋转。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
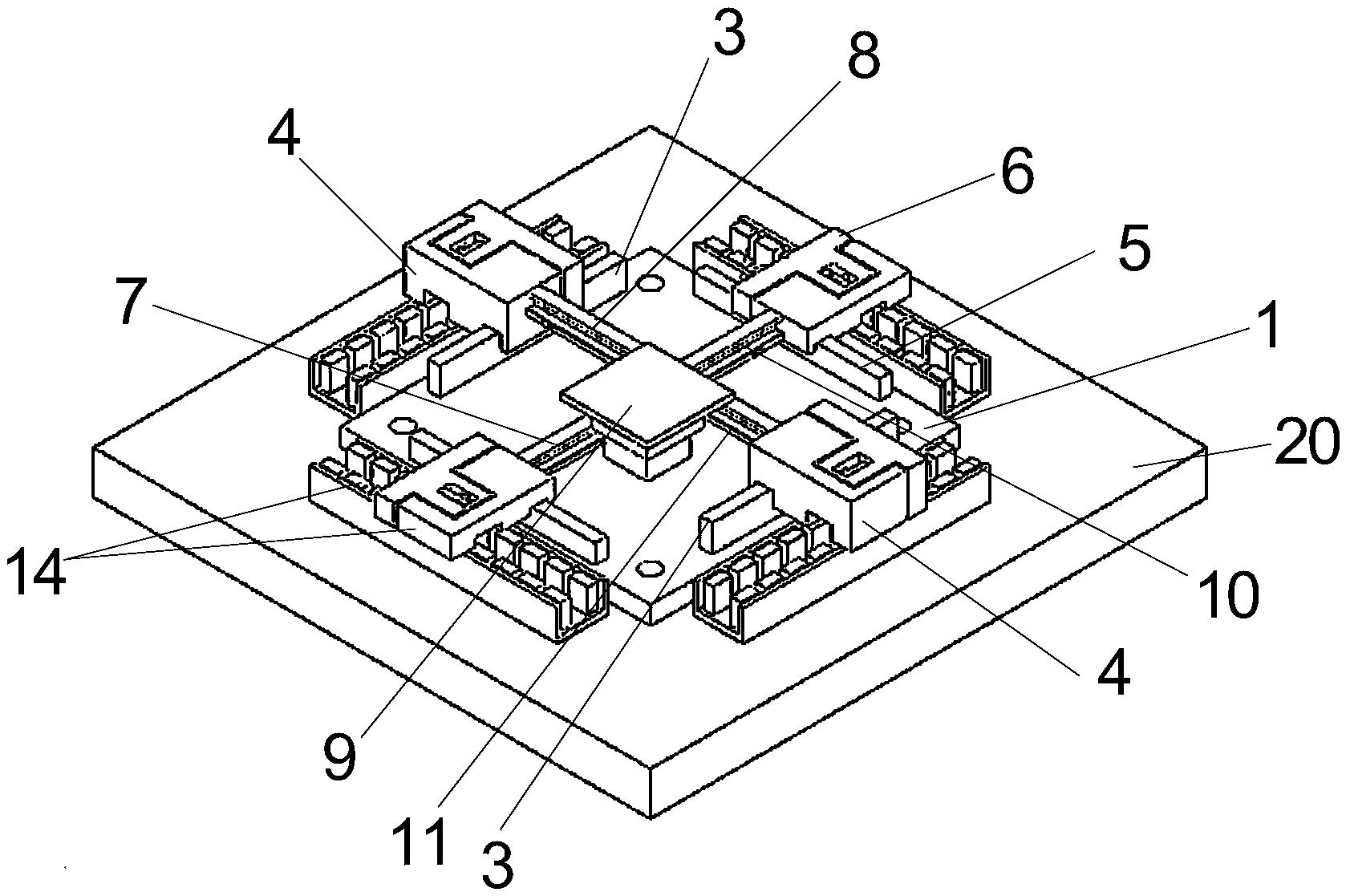
图1是本发明的微纳机器人控制系统整体结构示意图;
图2是本发明的驱动微纳机器人运动光路结构示意图;
图3是本发明的微纳机器人沿特定轨迹运动示意图;
图4是本发明的微纳机器人多点异向运动示意图;
图5是本发明的光驱动型微纳机器人群体运动图形示意图。
图中:计算机控制单元1;光源组件2;光束会聚组件3;全反射镜4;聚光镜5;样品室6;图像传感器7;显微镜8;光机9;滤光片10;第一抛物曲面镜11;第二抛物曲面镜12;驱动微纳机器人运动光点13;光驱动型微纳机器人14;光点运动轨迹15;光驱动型微纳机器人群16;驱动微纳机器人运动图案17;光驱动型微纳机器人群运动轨迹18。
具体实施方式
下面结合附图对本发明作进一步详细说明。
具体实施方式一:
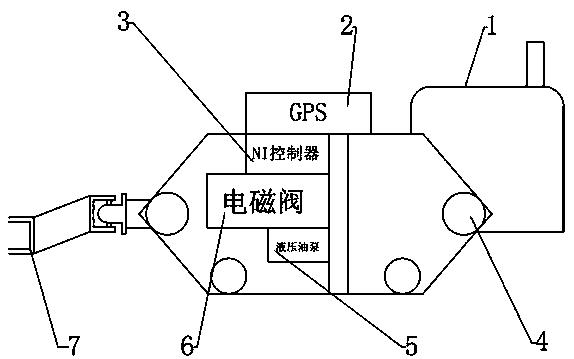
下面结合图1-5说明本实施方式,一种微纳机器人控制系统,包括计算机控制单元1、光源组件2、光束会聚组件3、全反射镜4、聚光镜5、样品室6和光驱动型微纳机器人14,所述计算机控制单元1控制光源组件2发射不同波段的光,不同波段的光依次经过光束会聚组件3、全反射镜4和聚光镜5投射在样品室6内驱动样品室6内的光驱动型微纳机器人14运动;可以通过计算机控制单元1控制光源组件2出射不同波段的光,同时调节光源组件2、光束会聚组件3和全反光镜4之间的距离,使光以适当的大小投射样品室6上驱动样品室6内的光驱动型微纳机器人运动,利用全反射镜4改变光路的方向,使光可以投射到载操作样品室6。
具体实施方式二:
下面结合图1-5说明本实施方式,本实施方式对实施方式一作进一步说明,所述光源组件2包括光机9和滤光片10,计算机控制单元1通过USB口控制光机9发出不同的空间结构光,滤光片10对光机9发出的不同的空间结构光进行过滤获得所需的光;通过计计算机控制单元1控制光机9改变光点的强度来调节光驱动型微纳机器人14的运动速度。
具体实施方式三:
下面结合图1-5说明本实施方式,本实施方式对实施方式二作进一步说明,所述光束会聚组件3包括第一抛物曲面镜11和第二抛物曲面镜12,第一抛物曲面镜11和第二抛物曲面镜12对光机9发出不同的空间结构光进行聚光。光机9的发光口、滤光片10、第一抛物曲面11、第二抛物曲面12和全反光镜4的中心位于同一水平线上,光机9的发光口、滤光片10、第一抛物曲面11、第二抛物曲面12和全反光镜4之间的距离可调节;使光以适当的大小投射样品室6上,提高光源组件2投射出光的功率密度。
具体实施方式四:
下面结合图1-5说明本实施方式,本实施方式对实施方式一至三任一项作进一步说明,所述微纳机器人控制系统还包图像传感器7和括显微镜8,样品室6放置在显微镜8的载物台上,图像传感器7和显微镜8连接,图像传感器7和计算机控制单元1连接;显微镜8观察光驱动型微纳机器人14的运动状态。
具体实施方式五:
下面结合图1-5说明本实施方式,本实施方式对实施方式四作进一步说明,所述图像传感器7将显微镜8成像到的光驱动型微纳马达运动产生的图像数据传输到计算机控制单元1上;通过将图像传感器7与计算机相连,以获得光驱动型微纳机器人14运动的图像数据。
具体实施方式六:
下面结合图1-5说明本实施方式,本实施方式对实施方式一至三任一项作进一步说明,所述投射在样品室6上的不同波段的光形成多个按照一定路径运动驱动微纳机器人运动光点13,多个驱动微纳机器人运动光点13分别驱动样品室6内设置的多个光驱动型微纳机器人14按照驱动微纳机器人运动光点13的运动路径进行运动。
具体实施方式七:
下面结合图1-5说明本实施方式,本实施方式对实施方式六作进一步说明,所述驱动微纳机器人运动光点13设置有两至三个,驱动微纳机器人运动光点13和光驱动型微纳机器人14的数量相同,
具体实施方式八:
下面结合图1-5说明本实施方式,本实施方式对实施方式七作进一步说明,所述每个驱动微纳机器人运动光点13的光点运动轨迹15各不相同,驱动微纳机器人运动光点13驱动对应的光驱动型微纳机器人14按照对应的光点运动轨迹15进行运动。
具体实施方式九:
下面结合图1-5说明本实施方式,本实施方式对实施方式一至三任一项作进一步说明,所述投射在样品室6上的不同波段的光形成多个按照一定路径运动驱动微纳机器人运动图案17,驱动微纳机器人运动图案17驱动光驱动型微纳机器人14形成光驱动型微纳机器人群16,驱动微纳机器人运动图案17驱动对应的光驱动型微纳机器人群16按照驱动微纳机器人运动图案17的光驱动型微纳机器人群运动轨迹18运动路径进行运动。
具体实施方式十:
下面结合图1-5说明本实施方式,本实施方式对实施方式九作进一步说明,所述所述计算机控制单元1控制多个驱动微纳机器人运动图案17进行平移和旋转,多个驱动微纳机器人运动图案17分别驱动对应的光驱动型微纳机器人群16进行平移和旋转。
本发明的一种微纳机器人控制系统,其工作原理为:
使用时样品室6放置在显微镜8的载物台上,以便于观察光驱动型微纳机器人的运动状态,连接光路原件及相关设备,将计算机控制单元1与光机9的USB口相连,并通过计算机控制单元1将光机9的输出图片调成是全光输出;计算机控制单元1通过USB口控制光机9发出不同的空间结构光;通过计算机控制单元1控制光机9改变光点的强度来调节光驱动型微纳机器人的运动速度,滤光片10对光机9发出的不同的空间结构光进行过滤获得所需的光,第一抛物曲面镜11和第二抛物曲面镜12对光机9发出不同的空间结构光进行聚光;提高光源组件2投射出光的功率密度,将光机9的发光口与滤光片10、第一抛物曲面11、第二抛物曲面12、全反光镜4的中心放在同一水平线上;通过全反光镜4改变光路,通过聚光镜5,照射到样品室6;同时调节激光源9的发光口、滤光片10、第一抛物曲面11、第二抛物曲面12、全反光镜4的距离,使光以适当的大小投射样品室6上;图像传感器7和显微镜8连接,图像传感器7和计算机控制单元1连接;图像传感器7将显微镜8成像到的光驱动型微纳机器人运动产生的图像数据传输到计算机控制单元1上;如图3所示计算机控制单元1控制光源组件2发射一个按照一定路径运动驱动微纳机器人运动光点13,驱动微纳机器人运动光点13和光驱动型微纳机器人14的大小相近,利用光驱动型微纳机器人14的对于光的趋向作用,驱动微纳机器人运动光点13驱动光驱动型微纳机器人14按照驱动微纳机器人运动光点13的光点运动轨迹15进行运动,如图4所示计算机控制单元1控制光源组件2发射多个按照一定路径运动驱动微纳机器人运动光点13,驱动微纳机器人运动光点13和光驱动型微纳机器人14的大小相近,利用光驱动型微纳机器人14的对于光的趋向作用,驱动微纳机器人运动光点13驱动光驱动型微纳机器人14按照驱动微纳机器人运动光点13的光点运动轨迹15进行运动;如图5所示计算机控制单元1控制多个驱动微纳机器人运动图案17进行平移和旋转,驱动微纳机器人运动图案17驱动光驱动型微纳机器人14形成光驱动型微纳机器人群16,多个驱动微纳机器人运动图案17分别驱动对应的光驱动型微纳机器人群16进行平移和旋转,多个驱动微纳机器人运动图案17分别驱动对应的光驱动型微纳机器人群16按照光驱动型微纳机器人群运动轨迹18的轨迹进行运动。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
一种微纳机器人控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0