








专利摘要
本发明提供了一种半球差动球形机器人,该球形机器人由左、右两个半球壳构成一个球形外壳;在球壳内装设有主框架;在左、右半球壳的顶部内侧分别固定有左、右支撑座;该支撑座与所对应两矩形框架连接处之间通过支撑架相连接;该支撑架一端与主框架固定连接,另一端与支撑座滑动连接;在支撑架与主框架固定连接处设有电机支板,用以固定长轴电机;该长轴电机通过穿设于支撑架中的轴承与支撑座相连接;在主框架内还设置有至少一个重摆;该重摆设置在竖直平面上,通过重摆框架与主框架相固定。该半球差动球形机器人是通过将球壳分为两个相互独立的半球壳进行分别驱动控制,使其具有更为灵活、准确的运动方位控制能力。
权利要求
1、半球差动球形机器人,其特征在于:该球形机器人由左、右两个半球壳构成一个球形外壳;在球壳内装设有主框架;该主框架由相互垂直固定的两个矩形框架构成;该两个矩形框架的两侧连接处与两个半球壳的顶部相对应;在左、右半球壳的顶部内侧分别固定有左、右支撑座;在支撑座与半球壳之间夹设有垫片;
该支撑座与所对应两矩形框架连接处之间通过支撑架相连接;该支撑架一端与主框架固定连接,另一端与支撑座滑动连接;在支撑架与主框架固定连接处设有电机支板,用以固定长轴电机;该长轴电机通过穿设于支撑架中的轴承与支撑座相连接;
在主框架内还设置有至少一个重摆;所述重摆为劣弧状重物;该重摆设置在竖直平面上,通过重摆框架与主框架相固定。
2、如权利要求1所述的半球差动球形机器人,其特征在于:在所述左、右半球壳的开缝处还设置了圆环形的滚轮;该球形机器人通过固定在所述主框架上的滚轮支架支撑所述滚轮;该滚轮支架一端固定在主框架上,另一端则与滚轮滑动连接,使滚轮可以在滚轮支架上滑动。
3、如权利要求2所述的半球差动球形机器人,其特征在于:所述滚轮支架共设置有四个,分别固定在所述两个矩形框架的外侧面上。
4、如权利要求1所述的半球差动球形机器人,其特征在于:在所述左、右半球壳接缝端部的外表面上设有圆环形的橡胶环。
5、如权利要求1所述的半球差动球形机器人,其特征在于:还设有重摆轴电机、电机套筒、重摆框架、轴承端盖和重摆轴;该电机套筒呈筒状;所述重摆轴电机通过该电机套筒与主框架相固定;该电机套筒的底部开有开孔,重摆轴电机的输出轴通过该开孔与重摆轴键联;该重摆轴通过其两端设置的重摆框架和轴承端盖与主框架相固定;重摆轴与轴承端盖之间呈滑动连接,使重摆轴可以在轴承端盖上滑动;该重摆轴的一端与重摆轴电机相连接,另一端与所述重摆相连接,使得重摆就可以通过重摆轴电机的带动而转动。
说明书
技术领域技术领域
本发明涉及一种球形机器人,特别是一种将球形机器人分为左右半球进行差动驱动,使其具有全方位滚动能力的球形机器人,属于智能机器人技术领域。
技术背景背景技术
在目前太空探索、军事、工业及家庭服务中,移动机器人的应用越来越广泛。球形机器人属于移动机器人的一种,球形机器人与地面点的接触属于滚动摩擦,阻力小,移动和转向灵活方便,具有全方位移动和零转弯半径的特点,现在各种智能家电正逐步进入普通家庭之中,球形机器人外形新颖,运动方式特殊,不怕翻倒,不会勾到其他东西,转弯灵活,适合在家庭这种特殊而且复杂的环境下工作。可以作为电子管家来对数字家电进行控制,也可以作为电子宠物供人们娱乐(例如可以搭载MP3播放器等娱乐设备),是未来家庭中一个非常得力的好帮手。
球形机器人的精确控制和智能化需要安装大量的传感器,但是现有球形机器人是全封闭的结构,传感器的安装和外部信息的获取都受到很大限制。而且现有球形机器人在双轴耦合的情况下要灵活、准确的控制前进方向并追踪目标是很困难的。因此,本专利设计了半球差动球形机器人是在现有球形机器人的基础上,融合两轮自平衡机器人的左右两轮差动驱动特点的一种移动机器人。这种机器人不仅保留了球形机器人在二维平面内灵活运动的优点,中部开缝设计使内部传感器与外界环境之间没有了球壳的制约,可以更好的获取外部环境信息,并在此基础上实现智能化,从而扩大了球形移动机器人的应用范围。
发明内容发明内容
本发明的发明目的在于解决现有技术中存在的问题,提供一种将球形机器人分为左右半球进行差动驱动,使其具有全方位滚动能力的球形机器人。
本发明的发明目的是通过下述技术方案予以实现的:
半球差动球形机器人,其特征在于:该球形机器人由左、右两个半球壳构成一个球形外壳;在球壳内装设有主框架;该主框架由相互垂直固定的两个矩形框架构成;该两个矩形框架的两侧连接处与两个半球壳的顶部相对应;在左、右半球壳的顶部内侧分别固定有左、右支撑座;在支撑座与半球壳之间夹设有垫片;
该支撑座与所对应两矩形框架连接处之间通过支撑架相连接;该支撑架一端与主框架固定连接,另一端与支撑座滑动连接;在支撑架与主框架固定连接处设有电机支板,用以固定长轴电机;该长轴电机通过穿设于支撑架中的轴承与支撑座相连接;
在主框架内还设置有至少一个重摆;所述重摆为劣弧状重物;该重摆设置在竖直平面上,通过重摆框架与主框架相固定。
在所述左、右半球壳的开缝处还设置了圆环形的滚轮;该球形机器人通过固定在所述主框架上的滚轮支架支撑所述滚轮;该滚轮支架一端固定在主框架上,另一端则与滚轮滑动连接,使滚轮可以在滚轮支架上滑动。
所述滚轮支架共设置有四个,分别固定在所述两个矩形框架的外侧面上。
在所述左、右半球壳接缝端部的外表面上设有圆环形的橡胶环。
还设有重摆轴电机、电机套筒、重摆框架、轴承端盖和重摆轴;该电机套筒呈筒状;所述重摆轴电机通过该电机套筒与主框架相固定;该电机套筒的底部开有开孔,重摆轴电机的输出轴通过该开孔与重摆轴键联;该重摆轴通过其两端设置的重摆框架和轴承端盖与主框架相固定;重摆轴与轴承端盖之间呈滑动连接,使重摆轴可以在轴承端盖上滑动;该重摆轴的一端与重摆轴电机相连接,另一端与所述重摆相连接,使得重摆就可以通过重摆轴电机的带动而转动。
本发明的有益效果是:该半球差动球形机器人是通过将球壳分为两个相互独立的半球壳进行分别驱动控制,使其具有更为灵活、准确的运动方位控制能力,同时也为机器人上的传感器提供了更为有利的安装位置。
附图说明附图说明
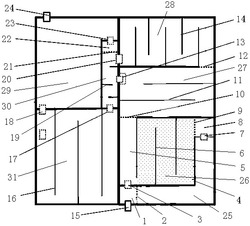
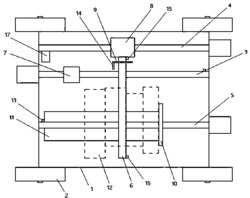
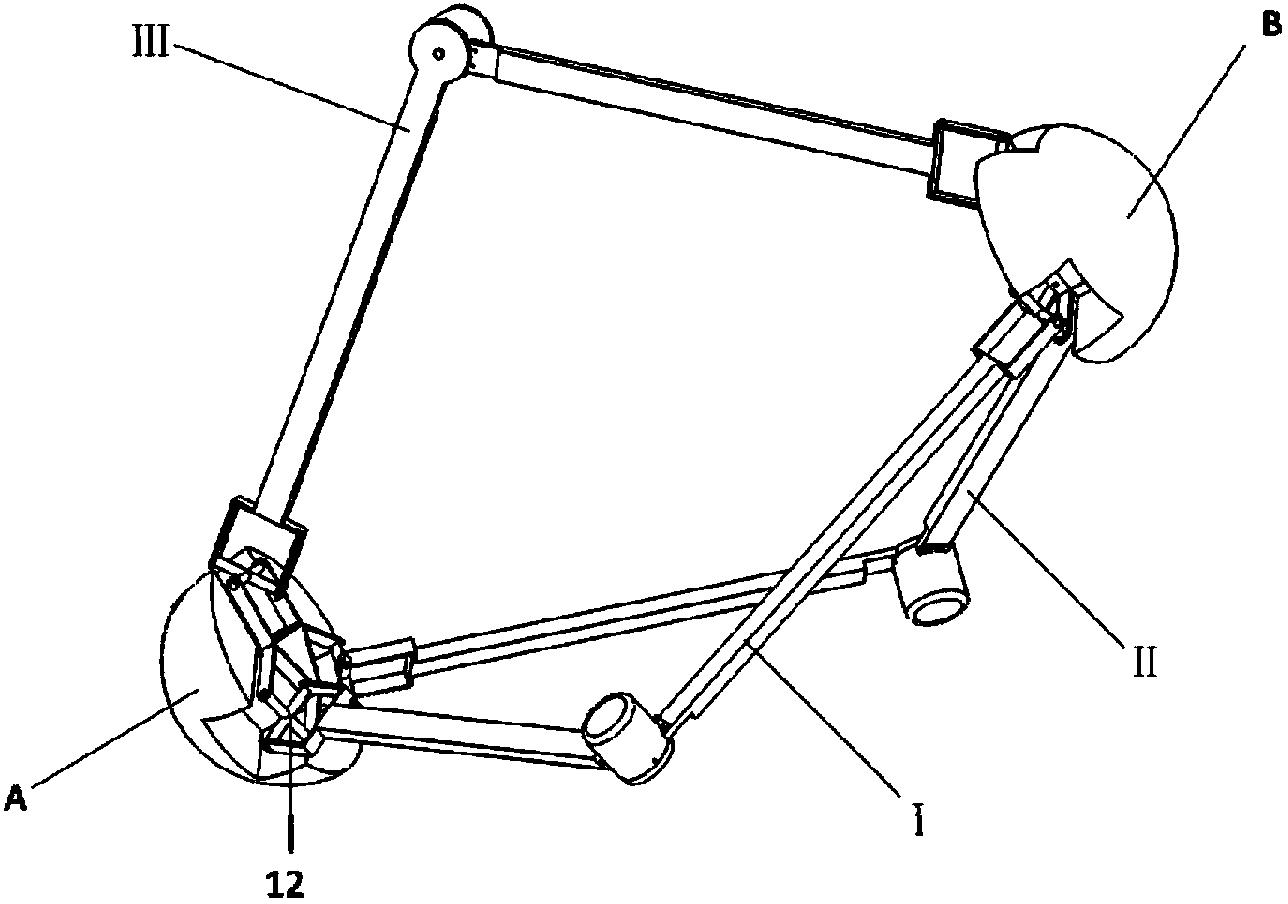
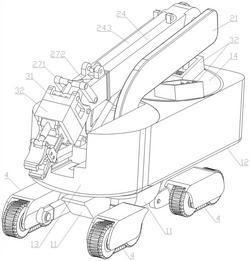
图1为半球差动球形机器人的俯视剖面结构图;
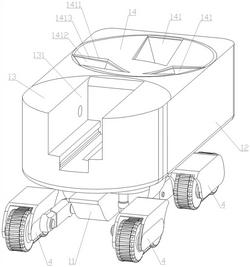
图2为半球差动球形机器人的正视结构图。
具体实施方式具体实施方式
下面结合附图和实施例对本发明作进一步描述。
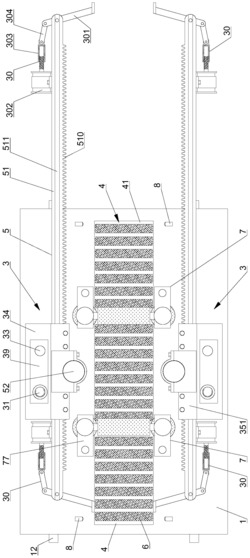
图1为该半球差动球形机器人的俯视剖面结构图。图2为该半球差动球形机器人的正视结构图。如图所示,该球形机器人由左半球壳1和右半球壳8构成一个球形外壳。在球壳内装设有主框架2。该主框架2由相互固定两个矩形框架构成。两个矩形框架相互垂直设置,位于竖直平面上的框架称为竖直矩形框架,位于水平平面上的框架称为水平矩形框架。该两个矩形框架的两侧连接处与两个半球壳的顶部相对应。在左右半球壳的顶部内侧分别固定有左支撑座18和右支撑座9。在支撑座与半球壳之间夹设有垫片19。
由于,该球形机器人左右半球内部结构成左右对称结构。因此,下面仅以左半球为例进行说明。在左支撑座18与两矩形框架左侧连接处之间通过支撑架17相连接。支撑架17一端与主框架2固定连接,而另一端与左支撑座18滑动连接。在支撑架17与主框架2固定连接处设有左电机支板15,用以固定左长轴电机14。左长轴电机14通过穿设于支撑架17中的左轴承16与左支撑座18相连接。当左长轴电机14运转时,其通过左轴承16带动左支撑座18旋转,进而带动左半球壳1旋转。由于,右半球内部结构与左半球呈对称结构,在此就不再对右半球内部结构做重复叙述。
在主框架2内还设置有至少一个重摆10。所述重摆10为一个呈劣弧状的重物,其重量占整个球形机器人的较大比重。该重摆10设置在竖直平面上,通过重摆框架11与主框架2相固定。通过设置该重摆10使得球形机器人可以如不倒翁一样,确定出机器人的上下位置关系。
上述结构的半球差动球形机器人中左右两个半球壳之间相互独立,分别由两个长轴电机进行驱动控制。这样的结构设计,使得该球形机器人通过对两个半球壳动作的分别控制,可以实现机器人进行不同的运动动作。具体地说,当两个长轴电机带动左右半球壳同向同速转动时,则机器人可以沿直线前进或后退。当长轴电机带动左右半球壳以不同速度转动时,则机器人将实现差速转弯动作。而当长轴电机带动左右半球壳反向同速转动时,则机器人可以实现零半径的原地旋转。可见,本发明所设计的半球差动球形机器人在运动方式上要比现有的球形机器人更为丰富。
不仅如此,由于本发明的半球差动球形机器人分为两个相互独立的半球。因此,该机器人可以在两个半球壳衔接的开缝处设置传感器,使得这些传感器与外界环境之间没有了球壳的制约,可以更好的获取外部环境信息。并且在此基础上实现智能化,从而扩大了球形移动机器人的应用范围。
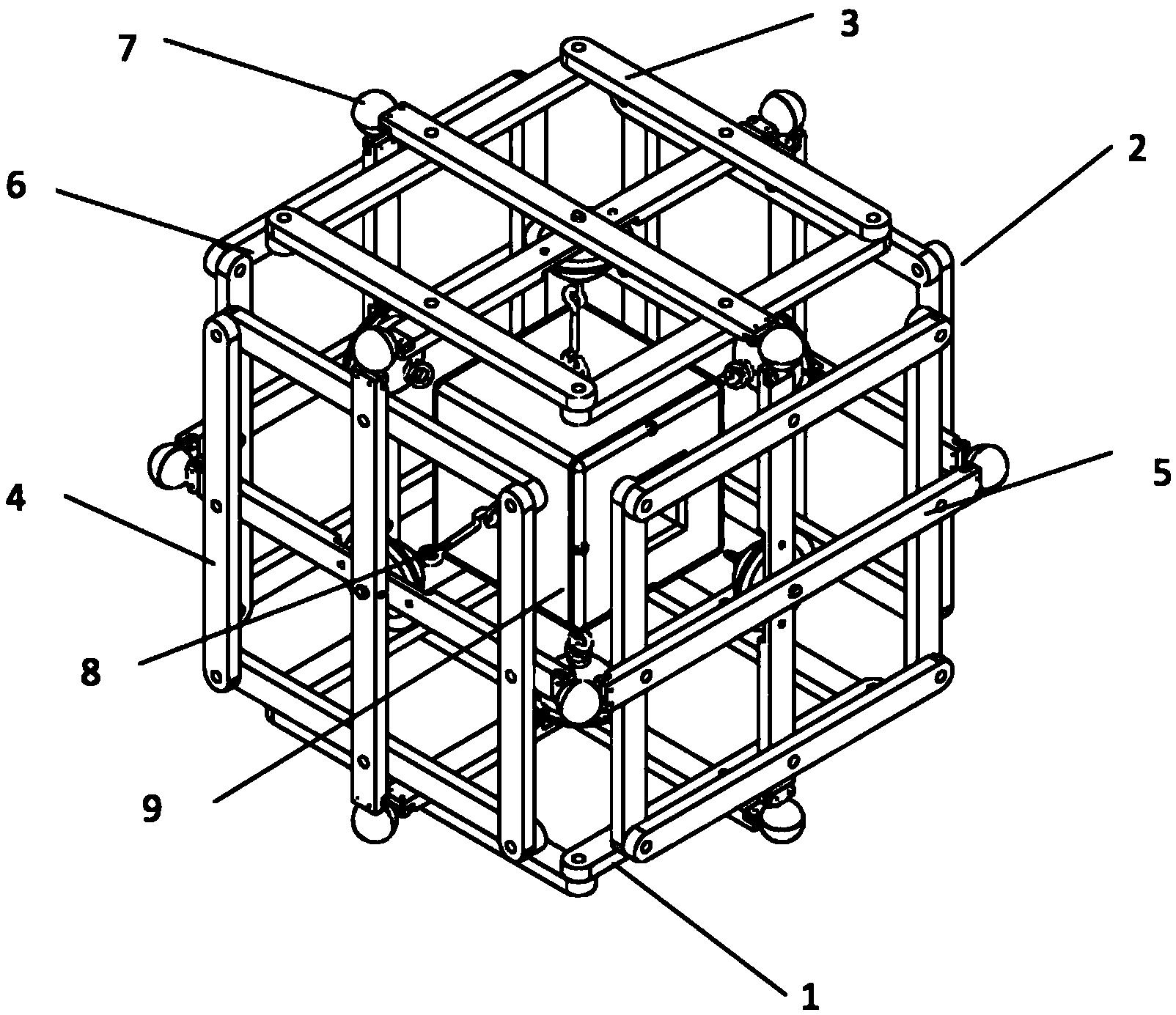
如图所示,基于上述在球壳开缝处设置传感器的目的,本发明在左右半球壳的开缝处还设置了圆环形的滚轮5。该球形机器人通过固定在主框架2上的滚轮支架3支撑所述滚轮5。滚轮支架3一端固定在主框架2上,另一端则与滚轮5滑动连接,使滚轮5可以在滚轮支架3上滑动。本实施例中,共设置有四个滚轮支架3,分别固定在所述两个矩形框架的外侧面上。传感器设置在这样的滚轮5上可以在机器人运动过程中保持相对固定的位置,以便于其可以更好的获取外部环境信息。
除此之外,如图1所示,本发明的球形机器人还在左右半球壳接缝端部的外表面设有圆环形的橡胶环4,以进一步增加球形机器人与地面的摩擦系数、保护球形外壳表面。
另外,本发明所设计的球形机器人除了可以如前所述通过两个独立的长轴电机分别驱动两个半球壳运动以实现各种动作外,还仿照传统球形机器人的动作方式,设计了重摆驱动动作方式,以实现与现有球形机器人控制的兼容。如图所示,该球形机器人中还设有重摆轴电机6、电机套筒7、重摆框架11、轴承端盖12和重摆轴13。该电机套筒7呈筒状,刚好可使重摆轴电机6安置其中。重摆轴电机6通过该电机套筒7与主框架2相固定。该电机套筒7的底部开有开孔,重摆轴电机6的输出轴通过该开孔与重摆轴13键联。该重摆轴13通过其两端设置的重摆框架11和轴承端盖12与主框架2相固定。重摆轴13与轴承端盖12之间呈滑动连接,使重摆轴13可以在轴承端盖12上滑动。该重摆轴13的一端与重摆轴电机6相连接,而另一端与所述重摆10相连接。这样重摆10就可以通过重摆轴电机6的带动进行转动,进而通过改变球形机器人的重心方向控制机器人的运动方向。由于这种运动方式与现有的球形机器人的运动方式相类似,在此就不再对其运动方式的具体控制做过多叙述。通过这样的结构设计,本专利所设计的球形机器人不仅可以按照前述双半球壳分别独立驱动的运动方式动作,也可以按照既有的球形机器人运动方式动作。这样,就是的本专利所设计的球形机器人可以继承很多现有的球形机器人的运动控制技术。
综上所述,本发明所设计的半球差动球形机器人是通过将球壳分为两个相互独立的半球壳进行分别驱动控制,使其具有更为灵活、准确的运动方位控制能力,同时也为机器人上的传感器提供了更为有利的安装位置。因此,本领域一般技术人员在该设计思想下所做的任何不具有创造性的改动,均应视为在本发明的保护范围之内。
半球差动球形机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0