










专利摘要
本发明涉及水陆两栖机器人,具体地说是一种轮桨腿一体化驱动的水陆两栖机器人,包括前浮筒、中前浮筒、水密电子舱、中后浮筒、后浮筒、框架及轮桨腿驱动模块,框架上依次安装有前浮筒、中前浮筒、水密电子舱、中后浮筒及后浮筒,在框架上设有多组轮桨腿驱动模块,每组由两个轮桨腿驱动模块组成、对称安装在框架的两侧;轮桨腿驱动模块包括轮桨腿直接驱动关节及回转关节,轮桨腿直接驱动关节可转动地与回转关节相连接。本发明采用三组对称分布的轮桨腿驱动模块,满足机器人在水陆两栖条件的爬行和浮游多运动模式的需求,同时兼顾了机器人运动的稳定性、快速性和协调性;还具有运动灵活,环境适应能力强、越障能力突出等特点。
说明书
技术领域技术领域
本发明涉及水陆两栖机器人,具体地说是一种轮桨腿一体化驱动的水陆两栖机器人。
技术背景背景技术
随着世界各海洋强国对海洋科学研究和海洋开发战略的深化与发展,海洋与陆地衔接的极浅水、碎浪带、拍岸浪区和滩涂地带成为近年来科学研究、环境监测、调查取样及军事领域等方面应用和关注的重点区域之一。当前国内外研究的水下机器人主要包括浮游式和爬行式,但这两种水下机器人的作业区域均存在一些局限性:在浅水和深水海域,当前的水下机器人具有一定的作业能力,而在极浅水、碎浪带和海滩区域作业能力较弱,甚至无法作业;而陆上应用的机器人对极浅水和碎浪带区域更是束手无策。水陆两栖机器人是一种集陆地和水中特定运动于一体的特种移动机器人,根据驱动机构和运动形式的不同,现有的水陆两栖机器人大致可以分为单一驱动型和复合驱动型两大类。单一驱动方式的水陆两栖机器人,无论是多足式、波动式、轮式、履带式等,都很难完全满足机器人在水中或者在陆地上的速度、越障、机动性、稳定性等方面的要求。为了实现水陆两栖机器人分别在水中和陆地上多种模式下的高性能运动,开发研制基于新型复合驱动机构的水陆两栖机器人成为近年来两栖机器人的重要研究方向和发展趋势之一。
发明内容发明内容
本发明的目的在于提供一种具有爬行和浮游多运动模式、综合运动性能良好的轮桨腿一体化驱动的水陆两栖机器人,解决了现有水陆两栖机器人在两栖环境下运动模式单一,作业能力较弱,快速性、机动性、稳定性和越障能力等方面不足的问题,为近海岸的海洋开发和利用提供一种有效的高技术手段。
本发明的目的是通过以下技术方案来实现的:
本发明包括前浮筒、中前浮筒、水密电子舱、中后浮筒、后浮筒、框架及轮桨腿驱动模块,所述框架上依次安装有前浮筒、中前浮筒、水密电子舱、中后浮筒及后浮筒,在框架上设有多组轮桨腿驱动模块,每组由两个轮桨腿驱动模块组成、对称安装在框架的两侧;所述轮桨腿驱动模块包括轮桨腿直接驱动关节及回转关节,轮桨腿直接驱动关节可转动地与回转关节相连接。
其中:所述轮桨腿驱动模块为三组、六个,对称分布于框架的前端、中部及后端,六个轮桨腿驱动模块结构相同;所述轮桨腿驱动模块内的轮桨腿直接驱动关节包括密封舱体、直接驱动电机组件、密封舱端盖、第一驱动轴、轮桨腿复合机构及桨毂,其中密封舱体的两侧沿径向对称向外延伸,一侧的延伸部可转动地安装在回转关节上,另一侧的延伸部可转动地与固接在框架上的固定支架相连接;所述直接驱动电机组件固定在密封舱体内、与水密电子舱内的电机驱动器组件电连接,直接驱动电机组件的输出轴与第一驱动轴的一端相连接,第一驱动轴的另一端连接有与其连动的轮桨腿复合机构,该轮桨腿复合机构中间的外侧设有连接于第一驱动轴另一端端部的桨毂;所述第一驱动轴上套设有与密封舱体密封连接的密封舱端盖;密封舱端盖通过支撑轴承套设在第一驱动轴上,支撑轴承的一侧设有套设在第一驱动轴上的第一锁紧螺母,支撑轴承的另一侧设有套设在第一驱动轴上的第一旋转密封件;轮桨腿复合机构包括轮缘、轮毂及桨叶,轮毂为中空圆柱、与第一驱动轴键连接,在轮毂的外圆周表面固接有多个均布的桨叶,每个桨叶的外缘均固接有轮缘;轮缘为圆弧形,各轮缘位于同一圆的圆周上,该圆的圆心在轮毂的轴线上;所述轮桨腿驱动模块内的回转关节包括回转舱体、回转电机组件、第一锥齿轮、第二锥齿轮、过渡轴及走线密封组件,所述回转舱体安装在框架上,回转电机组件固定在回转舱体的内部,回转电机组件的输出轴与过渡轴的一端相连接;所述轮桨腿直接驱动关节包括密封舱体,密封舱体的两侧沿径向对称向外延伸,其中一侧的延伸部可转动地与回转舱体相连接,在过渡轴上设有第一锥齿轮、与安装在密封舱体一侧的延伸部上的第二锥齿轮相啮合,带动轮桨腿直接驱动关节转动;在回转舱体上设有走线密封组件,回转电机组件的电缆通过走线密封组件与水密电子舱内的电机驱动器组件电连接;回转舱体内固接有回转电机座,回转电机组件安装在回转电机座上;过渡轴的另一端设有旋转电位计,旋转电位计的电缆通过走线密封组件与水密电子舱内的电机驱动器组件电连接;所述回转舱体通过旋转轴承及第二旋转密封件与密封舱体一侧的延伸部相连接,旋转轴承的上方设有套设在延伸部上的第二锁紧螺母,在第二锥齿轮的上方还设有套在密封舱体一侧延伸部上的固定螺母。
本发明的优点与积极效果为:
1.本发明的两栖机器人基于轮桨腿一体化的总体结构形式,采用三组对称分布的轮桨腿驱动模块,满足机器人在水陆两栖条件的爬行和浮游多运动模式的需求,同时兼顾了机器人运动的稳定性、快速性和协调性。
2.本发明的两栖机器人的驱动装置采用集轮、腿和螺旋桨功能于一身的轮桨腿复合式移动机构,使机器人在具备多样化的运动形式和较好综合运动性能的同时,保障了系统结构的紧凑性和整体的小型化,减轻了机器人载体的重量。
3.本发明的两栖机器人的驱动装置采用模块化设计,各轮桨腿驱动单元分别为独立的模块结构,彼此之间互不干扰,便于驱动装置的维护和更换。
4.本发明的两栖机器人还具有运动灵活,环境适应能力强、越障能力突出等特点。
附图说明附图说明
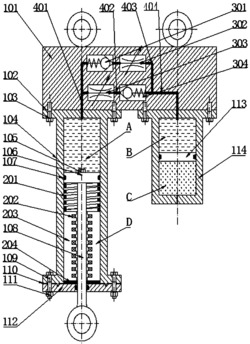
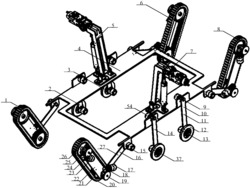
图1为本发明的结构原理图;
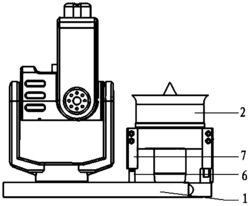
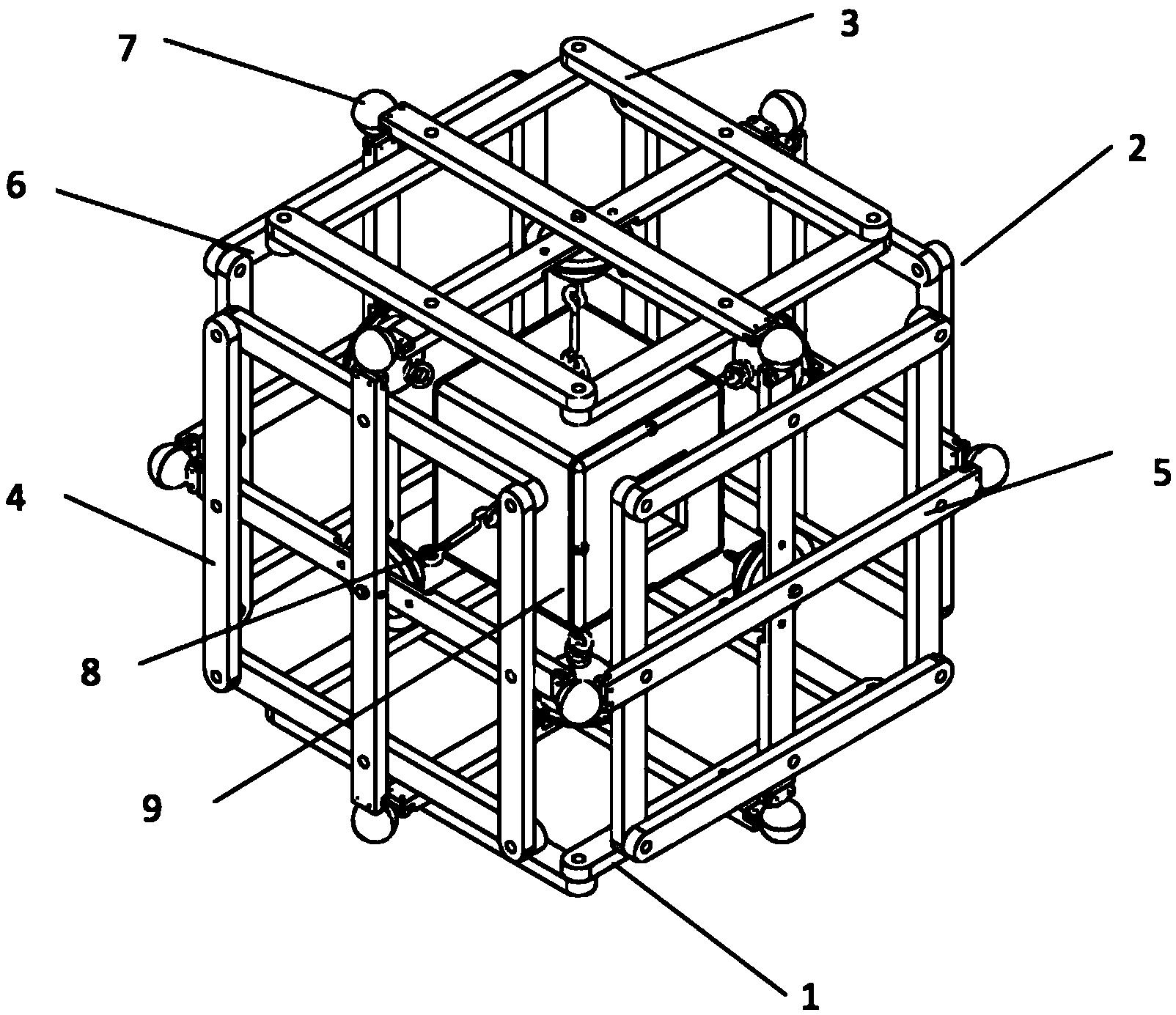
图2为本发明的结构示意图;
图3为图2的仰视图;
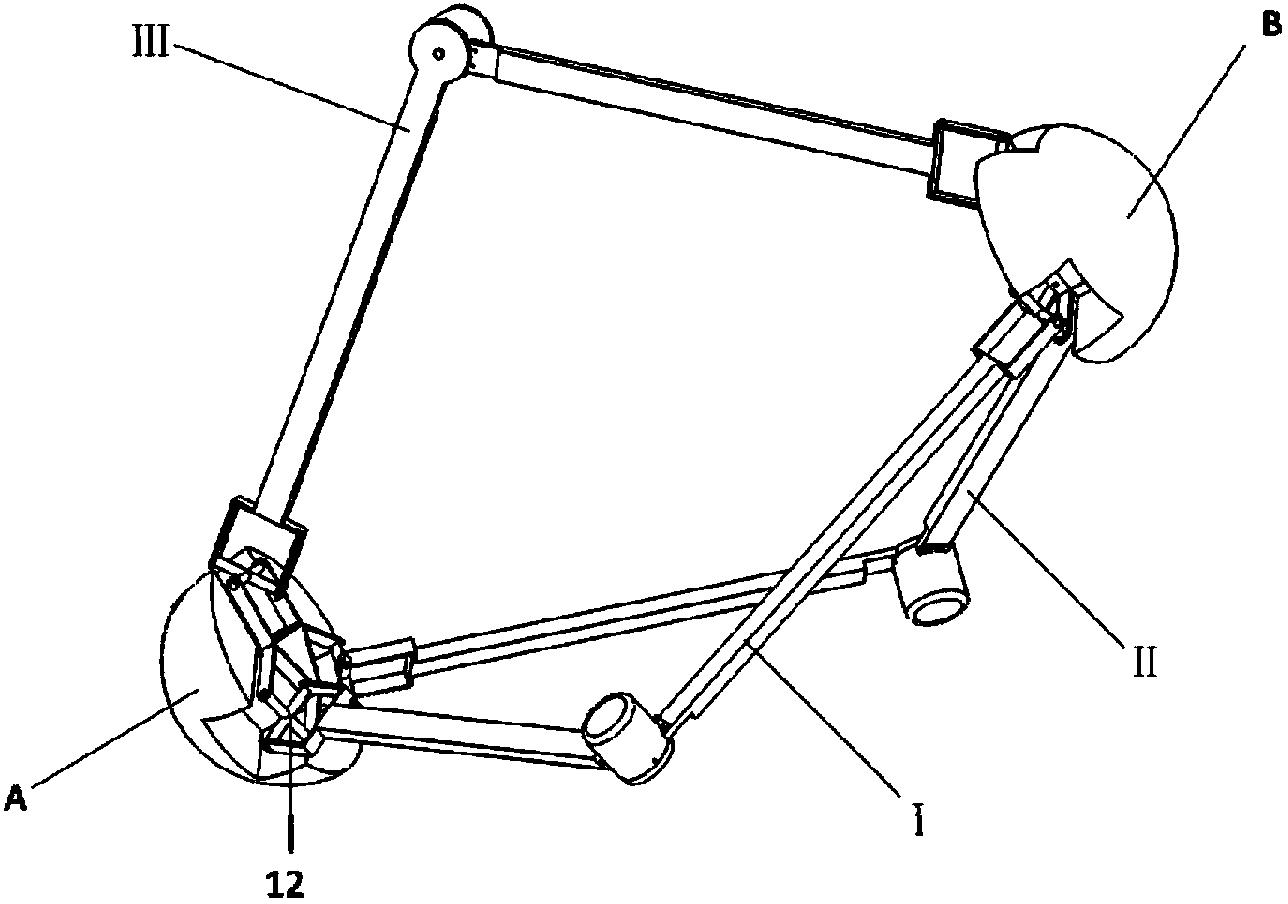
图4为图2中轮浆腿驱动模块的结构示意图;
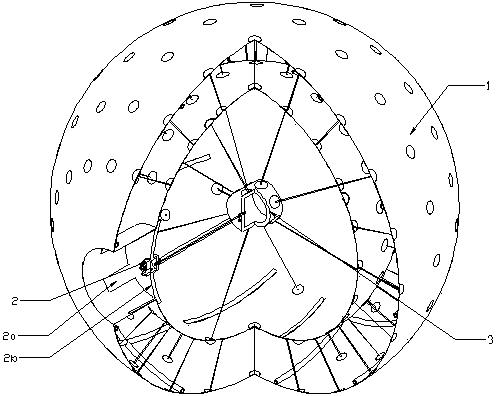
图5为图4中轮桨腿复合机构的结构示意图;
图6a为本发明直线爬行运动实现原理图;
图6b为本发明转向爬行运动实现原理图;
图6c为本发明直线浮游运动实现原理图;
图6d为本发明转向浮游运动实现原理图;
其中:1为前浮筒,2为中前浮筒,3为水密电子舱,4为中后浮筒,5为后浮筒,6为框架,7为轮桨腿驱动模块,8为轮桨腿直接驱动关节,9为回转关节,10为电机驱动器组件,11为二次锂离子电池组,12为脐带电缆水密接插件,13为GPS定位模块,14为无线数传模块,15为航行姿态传感器,16为控制计算机,17为深度传感器,18为接收天线,19为天线,20为固定支架,21为密封舱体,22为直接驱动电机组件,23为第一紧定螺钉,24为第一锁紧螺母,25为支撑轴承,26为第一旋转密封件,27为密封舱端盖,28为第一驱动轴,29为第一平键,30为轮桨腿复合机构,31为桨毂,32为第二旋转密封件,33为旋转轴承,34为第二锁紧螺母,35为旋转电位计,36为固定螺母,37为过渡轴,38为第一锥齿轮,39为第二锥齿轮,40为第二紧定螺钉,41为回转电机座,42为回转电机组件,43为回转舱体,44为走线密封组件,45为轮缘,46为轮毂,47为桨叶。
具体实施方式具体实施方式
下面结合附图对本发明作进一步详述。
如图1~3所示,本发明包括前浮筒1、中前浮筒2、水密电子舱3、中后浮筒4、后浮筒5、框架6及轮桨腿驱动模块7,其中前浮筒1、中前浮筒2、水密电子舱3、中后浮筒4及后浮筒5依次通过螺钉固定安装在框架6上;在框架6上设有多组轮桨腿驱动模块7,每组由两个轮桨腿驱动模块7组成、对称安装在框架6的两侧;本实施例的轮桨腿驱动模块7为三组、六个,对称分布于框架6的前端、中部及后端,六个轮桨腿驱动模块7结构相同,均包括轮桨腿直接驱动关节8及回转关节9,轮桨腿直接驱动关节8及回转关节9分别通过螺钉固定在框架6上,轮桨腿直接驱动关节8可转动地与回转关节9相连接。
本发明的水密电子舱3为现有技术,包括电机驱动器组件10、二次锂离子电池组11、脐带电缆水密接插件12、GPS定位模块13、无线数传模块14、航行姿态传感器15、控制计算机16及深度传感器17,其中二次锂离子电池组11位于水密电子舱3的中部,用于保持机器人整体的平衡;脐带电缆水密接插件12固连在水密电子舱3的盖板上;航行姿态传感器15水平安装在水密电子舱3的底板上;深度传感器17位于水密电子舱3的前侧面,通过水密处理固连在水密电子舱3的侧板上;电机驱动器组件10、GPS定位模块13及无线数传模块14分别设置在水密电子舱3内。在中前浮筒2的顶部安装有GPS定位模块13的接收天线18,中后浮筒4的顶部安装有无线数传模块14的天线19。控制计算机16的采集信号输入端通过航行姿态传感器15及深度传感器17采集航行姿态数据及航行深度数据,卫星信号输入端通过GPS定位模块13及其接收天线18接收卫星定位信号;控制计算机16的控制输出端接至电机驱动器组件10的控制回路,信号输出端通过无线数传模块14及其天线19与上位机进行无线通讯。
本发明的电机驱动器组件10为市购产品,购置于苏州钧和伺服科技有限公司(生产商:瑞士Maxon公司)、型号为4QEC DECV 50/5;二次锂离子电池组11为市购产品,购置于潍坊威能环保电源有限公司、型号为WA3610;GPS定位模块13为市购产品,购置于北京合众思壮科技有限责任公司(生产商:美国GARMIN公司)、型号为GARMIN GPS15;无线数传模块14为市购产品,购置于深圳友迅达科技发展有限公司、型号为FC-203/SA;控制计算机16为市购产品,购置于广州周立功单片机有限公司、型号为ARM7 LPC2294。
如图4所示,轮桨腿驱动模块7中的轮桨腿直接驱动关节8包括密封舱体21、直接驱动电机组件22、第一锁紧螺母24、支撑轴承25、第一旋转密封件26、密封舱端盖27、第一驱动轴28、轮桨腿复合机构30及桨毂31,其中密封舱体21为中空的圆筒状结构,其两侧沿径向对称向外延伸、两侧延伸部的中心线共线,一侧的延伸部为中空圆柱、可转动地安装在回转关节9上,另一侧的延伸部通过轴承与固接在框架6上的固定支架20相连接。直接驱动电机组件22固定在密封舱体21内、与水密电子舱3内的电机驱动器组件10电连接,直接驱动电机组件22的输出轴与第一驱动轴28的一端通过第一紧定螺钉23固接,第一驱动轴28的另一端通过第一平键29与轮桨腿复合机构30实现连接,该轮桨腿复合机构30中间的外侧设有桨毂31,轮桨腿复合机构30通过桨毂31在旋紧螺钉的作用下紧固于第一驱动轴28另一端的端部。在密封舱体21靠近轮桨腿复合机构30的一端设有密封舱端盖27,密封舱端盖27通过螺钉连接实现与密封舱体21的固定;密封舱端盖27通过支撑轴承25套设在第一驱动轴28上,支撑轴承25的一侧设有套设在第一驱动轴28上的第一锁紧螺母24,用于支撑轴承25的轴向固定限位,支撑轴承25的另一侧设有套设在第一驱动轴28上的第一旋转密封件26,第一旋转密封件26外侧由压盖压紧,压盖通过螺钉与密封舱端盖固定。当直接驱动电机组件22工作时,可驱动第一驱动轴28转动,进而带动轮桨腿复合机构转动。直接驱动电机组件22为市购产品,购置于苏州钧和伺服科技有限公司(生产商:瑞士Maxon公司)、型号为MAXON EC32。
如图6所示,轮桨腿复合机构30集轮、腿和螺旋桨运动特点和功能于一体,包括轮缘45、轮毂46及桨叶47,轮毂46为中空圆柱、中间开有通孔、套设在第一驱动轴28上,轮桨腿复合机构30通过轮毂与第一驱动轴28键连接、与第一驱动轴28连动;在轮毂46的外圆周表面固接有多个均布的桨叶47(本实施例为三个),每个桨叶47的外缘均固接有轮缘45。轮缘45为圆弧形,各轮缘位于同一圆的圆周上,该圆的圆心在轮毂45的轴线上。桨毂31上的旋转螺钉由轮毂46上的通孔穿入、通过螺纹连接在第一驱动轴28的端部,对轮桨腿复合机构轴向定位。
如图4所示,轮桨腿驱动模块7中的回转关节9包括回转舱体43、回转电机组件42、第一锥齿轮38、第二锥齿轮39、过渡轴37、走线密封组件44、固定螺母36、旋转电位计35、第二锁紧螺母34、旋转轴承33及第二旋转密封件32,所述回转舱体43固接在框架6上,回转舱体43内通过螺钉固定有回转电机座41,回转电机组件42固定在回转电机座41上,过渡轴37上套设有第一锥齿轮38,第二紧定螺钉40将第一锥齿轮38与过渡轴37一并固连在回转电机组件42的输出轴上,过渡轴37的另一端通过轴承安装在回转电机座41上、并由回转电机座41穿过,然后与旋转电位计35相连,旋转电位计35还固连在回转电机座41上。密封舱体21一侧的延伸部(作为回转轴)由回转舱体43插入穿过回转电机座41、并通过旋转轴承33实现与回转舱体43的连接;旋转轴承33的下方设有套在该延伸部上的第二旋转密封件32,上方设有套在该延伸部上的第二锁紧螺母34,回转电机座41及第二锁紧螺母34分别使旋转轴承33的内、外圈定位,密封舱体21的垂向定位通过旋转轴承33、第二锁紧螺母34及回转电机座41共同实现。该延伸部上设有第二锥齿轮39,第二锥齿轮39的上方还设有固定螺母36,第二锥齿轮39通过固定螺母36固连在该延伸部上、并与第一锥齿轮38啮合,实现轮桨腿直接驱动关节8回转换向;在回转舱体43上设有走线密封组件44,直接驱动电机组件22的电缆由作为回转轴的延伸部的中间孔穿过、再经走线密封组件44与水密电子舱3内的电机驱动器组件10电连接;旋转电位计35及回转电机组件42的电缆也通过走线密封组件44与水密电子舱3内的电机驱动器组件10电连接。回转电机组件42工作,驱动过渡轴37转动,过渡轴37通过第一、二锥齿轮38、39的啮合带动整个轮桨腿直接驱动关节8回转换向。旋转电位计35为市购产品,购置于上海祥树欧茂机电设备有限公司(生产商:NOVOTECHNIK)、型号为WAL300;回转电机组件42为市购产品,购置于苏州钧和伺服科技有限公司(生产商:瑞士Maxon公司)、型号为MAXON EC max 30。
本发明的工作原理为:
本发明的水陆两栖机器人可以实现水陆两栖环境下的陆地爬行运动和水中浮游或水底爬行运动两种模式。
爬行运动模式:在爬行运动模式下,本发明的两栖机器人可进行如图6a所示的直线爬行运动或如图6b所示的转向爬行运动,直接驱动电机组件22工作,驱动第一驱动轴28旋转,再由第一驱动轴28带动轮桨腿复合机构30旋转,实现机器人的直线前进或后退;当两栖机器人需要转向时,回转电机组件42工作,驱动过渡轴37及其上的第一锥齿轮38旋转,再通过第一、二锥齿轮38、39的啮合,带动整个轮桨腿直接驱动关节8绕延伸部的中心线转动,实现转向;在爬行运动模式下,轮桨腿复合机构30主要发挥轮腿的功能,保障两栖机器人的运动具备快速性、可控性和较好的越障能力。
水中浮游或水底爬行运动模式:在水中,通过调整浮力,两栖机器人可以分别实现水中浮游运动和水底爬行运动,水底爬行运动与陆地爬行具有相同的工作原理;通过轮桨腿驱动模块7中回转关节9的驱动,两栖机器人可实现如图6c所示的直航浮游运动或如图6d所示的转向浮游运动,在浮游运动模式下,回转电机组件42工作,使轮桨腿复合机构30转动,直到第一驱动轴28与过渡轴37垂直,在直接驱动电机组件22的驱动下产生两栖机器人前进所需的推力,实现在水中的直航浮游运动,轮桨腿复合机构30主要发挥螺旋桨的作用;当在水中需要转向时,框架6两侧的轮桨腿复合机构30中的桨叶旋向相反,即可实现机器人在水中的转向浮游运动。
本发明的水陆两栖机器人可以实现陆地爬行和水中浮游两种运动模式,且无需更换驱动装置即可实现两种运动模式的自主切换。
一种轮桨腿一体化驱动的水陆两栖机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0