

IPC分类号 : B62K13/04,B62K13/00,B62K21/12,B62H1/12,B62M6/40,B62J45/00








专利摘要
一种基于可变形辅助平衡系统与差速驱动的轮足机器人,包括可变形辅助平衡系统、机械本体和自主导航行走系统,所述自主导航行走系统位于机械本体上,机械本体的后轮组通过后轴与可变形辅助平衡系统固定安装。整合了三轮足的稳定性和双轮足的便于骑行的特性。使用完毕后,可快速切换到稳定的三轮足自行走状态。可根据使用者的预约提前到达约定地点,节省了使用者的大量时间。变形至自主行走状态后,可自动返回到附近的基地,从根本上解决了现有单车乱停乱放的问题。基地可位于远离商场、学校、地铁口等繁华地段,释放了宝贵公共空间,降低了存放费用。供需一对一匹配,一改以往的过量投放方式,单车供应量可成倍降低,高效利用了物质资源。
权利要求
1.一种基于可变形辅助平衡系统与差速驱动的轮足机器人,其特征在于,包括可变形辅助平衡系统、机械本体和自主导航行走系统,所述自主导航行走系统位于机械本体上,机械本体的后轮组通过后轴与可变形辅助平衡系统固定安装。
2.根据权利要求1所述的一种基于可变形辅助平衡系统与差速驱动的轮足机器人,其特征在于:机械本体包括前叉、头管、前叉上管、车把、上管、车座、立管、立叉、座管、下管、前轮组、前轮变形锁定装置,曲柄中轴机构、脚踏、后叉、车把变形锁定装置、链条和后轮组,所述前叉一端与前轮组的前轴固定安装,所述前叉上管一端插入头管后与前叉另一端相连,且前叉上管与头管之间安装有前轮变形锁定装置,前叉上管另一端通过车把变形锁定装置与车把固定安装,头管侧壁分别与上管和下管一端焊接,上管另一端与座管侧壁焊接,座管侧壁还与水平架和立叉一端焊接,水平架另一端与立管一端焊接,所述座管一端安装有车座,座管与下管另一端均与曲柄的中轴安装管侧壁焊接,所述曲柄上安装有脚踏,曲柄的中轴安装管侧壁还与后叉一端焊接,后叉、立叉和立管另一端均与后轮组的后轴固定安装,所述后轮组上安装有可变形辅助平衡系统,曲柄中轴机构的牙盘与后轮组通过链条相连。
3.根据权利要求2所述的一种基于可变形辅助平衡系统与差速驱动的轮足机器人,其特征在于:所述车把变形锁定装置包括连接杆和连接管Ⅲ,连接杆的阶梯轴部分插入连接管Ⅲ的阶梯孔内,连接杆末端固定安装有限位板使连接杆与连接管Ⅲ转动安装,限位板通过螺钉与连接杆固定安装,连接杆外壁焊接有耳板Ⅰ,耳板Ⅰ为内部中空的结构,耳板Ⅰ的顶部侧壁开设有圆形孔,耳板Ⅰ底部侧壁开设有长方形孔Ⅰ,所述圆形孔内穿插有转动杆,转动杆位于耳板Ⅰ顶部侧壁外侧一端与旋转手柄固定安装,转动杆另一端与锁舌相连,耳板Ⅰ内腔顶部内侧壁与锁舌之间固定安装有第一弹簧,连接管Ⅲ外壁焊接有耳板Ⅱ和耳板Ⅲ,且耳板Ⅱ和耳板Ⅲ呈90°设置,耳板Ⅱ和耳板Ⅲ上均设置有与圆形孔同中心线的长方形孔Ⅱ,连接杆通过锁舌穿过连接管的耳板Ⅱ或耳板Ⅲ与连接管固定,所述车把变形锁定装置的连接杆与车把焊接,车把变形锁定装置的连接管与前叉上管焊接。
4.根据权利要求1所述的一种基于可变形辅助平衡系统与差速驱动的轮足机器人,其特征在于:所述可变形辅助平衡系统分为可变形辅助平衡系统A和可变形辅助平衡系统B,所述可变形辅助平衡系统A包括两个平衡轮Ⅰ和平衡轮连接管变形锁定装置Ⅰ,所述平衡轮Ⅰ包括车轮、支架、平衡轮减速器、平衡轮电机、联轴器Ⅰ和螺钉,所述平衡轮电机采用轮边电机或轮毂电机,平衡轮电机输出端与平衡轮减速器输入端相连,平衡轮减速器输出轴贯穿支架的竖直板且末端与联轴器Ⅰ一端相连,联轴器Ⅰ另一端通过螺钉与车轮固定安装,车轮直径为5-300mm,所述平衡轮电机和平衡轮减速器均与支架的水平板固定安装,所述平衡轮连接管变形锁定装置Ⅰ包括固定板,固定板沿长度方向一端侧壁为阶梯状,固定板最窄段加工有圆弧端,圆弧端周向均匀开设有卡槽,固定板的圆弧端通过轴与转动板Ⅰ和转动板Ⅱ相连,转动板Ⅰ和转动板Ⅱ延长度方向通过连接板焊接在一起,转动板Ⅰ和转动板Ⅱ之间通过转轴安装有锁杆,锁杆侧壁一端设置有与卡槽配合的卡块,锁杆侧壁另一端与连接板之间固定安装有第二弹簧,转动板Ⅰ和转动板Ⅱ上均开设有豁口,平衡轮连接管变形锁定装置Ⅰ通过固定板与后轮组的后轴固定安装,平衡轮连接管变形锁定装置Ⅰ通过转动板Ⅰ和转动板Ⅱ与平衡轮连接管Ⅰ一端相连,平衡轮连接管Ⅰ另一端与支架水平板末端焊接;
所述可变形辅助平衡系统B包括与两个平衡轮Ⅰ结构相同的两个平衡轮Ⅱ、伸缩机构Ⅰ和伸缩机构Ⅱ,伸缩机构Ⅰ和伸缩机构Ⅱ结构相同,均包括连接管Ⅰ、连接管Ⅱ、伸缩杆Ⅰ、伸缩杆Ⅱ,丝杆Ⅰ、丝杆Ⅱ、变形电机Ⅰ、变形电机Ⅱ、联轴器Ⅱ、联轴器Ⅲ、定位板Ⅰ、定位板Ⅱ、滑块Ⅰ和滑块Ⅱ,所述伸缩机构Ⅰ和伸缩机构Ⅱ均通过连接管Ⅰ一端与后轮组的后轴固定安装,且伸缩机构Ⅰ和伸缩机构Ⅱ以后轮组为对称中心,所述连接管Ⅰ内腔安装有变形电机Ⅰ,变形电机Ⅰ输出端通过联轴器Ⅱ与丝杆Ⅰ相连,丝杆Ⅰ贯穿连接管Ⅰ内的定位板Ⅰ与伸缩杆Ⅰ相连,起到支撑丝杆的作用,伸缩杆Ⅰ通过其上的滑块与连接管Ⅰ上的滑槽配合,伸缩杆Ⅰ伸出端与连接管Ⅱ一端相连,连接管Ⅱ内腔安装有变形电机Ⅱ,变形电机Ⅱ输出端通过联轴器Ⅲ与丝杆Ⅱ相连,丝杆Ⅱ贯穿连接管Ⅱ内的定位板Ⅱ与伸缩杆Ⅱ相连,起到支撑丝杆的作用,伸缩杆Ⅱ通过其上的滑块与连接管Ⅱ上的滑槽配合,伸缩杆Ⅱ末端与平衡轮Ⅱ的支架固定安装。
5.根据权利要求1所述的一种基于可变形辅助平衡系统与差速驱动的轮足机器人,其特征在于:所述自主导航行走系统包括双目深度相机、激光雷达、平衡轮电机控制器、平衡轮电机编码器、平衡轮电机驱动器、变形电机控制器、变形电机编码器、变形电机驱动器、上位机、卫星定位模块、GPRS无线通信模块、陀螺仪、触摸屏、行走系统启动按键、变形机构启动展开按键、变形机构启动收缩按键、蓄电池和控制箱,所述控制箱顶板上表面安装有激光雷达,所述控制箱的顶部侧壁外表面安装有双目视觉相机,控制箱的顶部侧壁上安装有触摸屏、行走系统启动按键、变形机构启动展开按键和变形机构启动收缩按键,所述控制箱内安装有蓄电池、上位机、陀螺仪、卫星定位模块和GPRS无线通讯模块,所述上位机分别与蓄电池、双目深度相机、激光雷达、平衡轮电机控制器、变形电机控制器、卫星定位模块、GPRS无线通讯模块、陀螺仪、行走系统启动按键、变形机构启动展开按键、变形机构启动收缩按键和触摸屏电连接,所述平衡轮电机控制器分别与平衡轮电机驱动器和平衡轮电机编码器电连接,所述变形电机控制器分别与变形电机驱动器和变形电机编码器电连接,所述自主导航行走系统通过互联网与后台服务器通信,自行走时采用卫星定位模块进行定位,采用车载陀螺仪的磁传感器输出进行位姿计算。
6.根据权利要求4所述的一种基于可变形辅助平衡系统与差速驱动的轮足机器人,其特征在于:在自行走时,所述后轮组为前进轮组,前轮组位于后轮组的后方,所述两个平衡轮Ⅰ或两个平衡轮Ⅱ为驱动轮,通过两个平衡轮Ⅰ或两个平衡轮Ⅱ的速度差实现转向。
说明书
技术领域
本实用新型属于电子信息、机器视觉、自动控制和机械设计技术领域,具体涉及一种基于可变形辅助平衡系统与差速驱动的轮足机器人。
背景技术
自从1791年法国的孔特德受到马车的启发而实用新型了全木结构的木马车,一种全新的代步工具在人类不断的追求和探索中更新换代。走路机、两轮机、高轮车,每一个不同的名字都代表着不同的时代。1886年,自行车之父工程师斯塔利实用新型现代自行车,单车开始真正的走入人类生活,成为人类历史上崭新的代步工具。靠人力驱动的单车使日常短距离出行非常方便,碳排放极低,对环境污染接近于零。单车还可作为健身工具,能够较少人体脂肪,增加身体的新陈代谢速率,提高全身活力。
进入20世纪以后,私人汽车、公共汽车、地铁在全球城市公共交通系统中占比逐年增加,而单车因携带或存放不方便等问题,使通过单车出行的人越来越少。但这些新兴的代步工具也有无法弥补的缺点,如使用成本高、环境污染严重、占用更多空间资源、需要花费大量的等待时间等。利用现代的最新技术使兼具节能、健身、低碳的单车重新走入人们的生活,是很多人的孜孜以求的梦想。
GPS卫星定位共享单车的出现是公共单车发展过程中的一次重要进步。用户可根据车上的GPS定位系统确定位置,解决了很多人“用时无车”的苦恼。在使用完后用户可以随意停放,使人们可以不用考虑存放和防盗窃问题,在2016年,大量的资本涌入了共享单车领域,中国出现了几十家共享单车公司。总数超过了1500万辆共享单车遍布中国的大中城市,单车也随即成为社会广泛关注的焦点。
盲目的过量投放,以及现有单车存在根本上的技术缺陷,使共享单车迅速从2017年的高峰走到了2018年的低谷。背后隐藏的问题逐渐浮出水面。数量众多的单车随意停放,占据了大量的公共空间,影响了正常的交通秩序。因停放没有规律,使用者在急需时很难在短时间内找到。人为的蓄意破坏造成了大量的单车无法正常使用,车企的运行和维护费用急剧增加。一度被人们广泛看好的绿色出行工具已到了生死抉择的边缘。
无人驾驶技术的大潮正滚滚而来。国内外科技巨头纷纷斥巨资并取得可观的阶段性成果,但无人汽车的安全性和反应能力仍有待考证。汽车运行使速度高,且本身质量大,一旦发生事故,会带来难以估量的损失。其道德问题也是社会各界关注的焦点,据奥巴马的高级经济学顾问撰写的名为《人工智能、自动化以及经济》,明确指出自动驾驶技术将影响220—310万人的工作。进而改变政治和经济格局,造成大量蓝领工人失业,引起社会动荡。
如果将无人驾驶技术和单车整合,使其具有自动驾驶功能,能在骑行者使用完单车后自动返回到指定地点,则会从根本上解决单车的乱停乱放问题。自动驾驶系统与单车结合具有很多先天优势。比如,单车本身自动运行时速度低,如果出现意外情况可在短时间内刹车,即使相撞,由于质量低,冲量小,被撞的一方受到伤害极低。此外,具有自主导航功能的自行车即使普及,也不会对工人阶层造成任何工作上的冲击。
将现有的单车简单集成自动驾驶系统,是一种解决问题的方法。但为了达到行走过程中和停止时的平衡,需要在单车上增加体积和重量都很大的机械平衡系统,行走过程中能耗增加,增加的平衡系统占据了骑行者的腿部活动空间,不便于骑乘者使用,降低了单车的易用性。特别是,单车简单集成自动驾驶系统后,为了让单车在前行时能自动转向,需要在在前把部位增加电机,使系统变得很复杂,不便于该系统的实际应用和推广。
实用新型内容
为了克服简单集成自动驾驶功能的单车,难以在自动行走过程中保持平衡的问题,也是为了给出一个简洁、实施性很强单车自主行驶问题解决方案,本实用新型将机器人技术引入单车,提出一种基于可变形辅助平衡系统和差速驱动的轮足机器人。
为了实现上述目的,本实用新型采用如下技术方案:
一种基于可变形辅助平衡系统与差速驱动的轮足机器人,包括可变形辅助平衡系统、机械本体和自主导航行走系统,所述自主导航行走系统位于机械本体上,机械本体的后轮组通过后轴与可变形辅助平衡系统固定安装。
机械本体包括前叉、头管、前叉上管、车把、上管、车座、立管、立叉、座管、下管、前轮组、前轮变形锁定装置,曲柄中轴机构、脚踏、后叉、车把变形锁定装置、链条和后轮组,所述前叉一端与前轮组的前轴固定安装,所述前叉上管一端插入头管后与前叉另一端相连,且前叉上管与头管之间安装有前轮变形锁定装置,前叉上管另一端通过车把变形锁定装置与车把固定安装,头管侧壁分别与上管和下管一端焊接,上管另一端与座管侧壁焊接,座管侧壁还与水平架和立叉一端焊接,水平架另一端与立管一端焊接,所述座管一端安装有车座,座管与下管另一端均与曲柄的中轴安装管侧壁焊接,所述曲柄上安装有脚踏,曲柄的中轴安装管侧壁还与后叉一端焊接,后叉、立叉和立管另一端均与后轮组的后轴固定安装,所述后轮组上安装有可变形辅助平衡系统,曲柄中轴机构的牙盘与后轮组通过链条相连。
所述车把变形锁定装置包括连接杆和连接管Ⅲ,连接杆的阶梯轴部分插入连接管Ⅲ的阶梯孔内,连接杆末端固定安装有限位板使连接杆与连接管Ⅲ转动安装,限位板通过螺钉与连接杆固定安装,连接杆外壁焊接有耳板Ⅰ,耳板Ⅰ为内部中空的结构,耳板Ⅰ的顶部侧壁开设有圆形孔,耳板Ⅰ底部侧壁开设有长方形孔Ⅰ,所述圆形孔内穿插有转动杆,转动杆位于耳板Ⅰ顶部侧壁外侧一端与旋转手柄固定安装,转动杆另一端与锁舌相连,耳板Ⅰ内腔顶部内侧壁与锁舌之间固定安装有第一弹簧,连接管Ⅲ外壁焊接有耳板Ⅱ和耳板Ⅲ,且耳板Ⅱ和耳板Ⅲ呈90°设置,耳板Ⅱ和耳板Ⅲ上均设置有与圆形孔同中心线的长方形孔Ⅱ,连接杆通过锁舌穿过连接管的耳板Ⅱ或耳板Ⅲ与连接管固定,所述车把变形锁定装置的连接杆与车把焊接,车把变形锁定装置的连接管与前叉上管焊接。
所述可变形辅助平衡系统分为可变形辅助平衡系统A和可变形辅助平衡系统B,所述可变形辅助平衡系统A包括平衡轮Ⅰ和平衡轮连接管变形锁定装置Ⅰ,所述平衡轮Ⅰ包括车轮、支架、平衡轮减速器、平衡轮电机、联轴器Ⅰ和螺钉,所述平衡轮电机采用轮边电机或轮毂电机,平衡轮电机输出端与平衡轮减速器输入端相连,平衡轮减速器输出轴贯穿支架的竖直板且末端与联轴器Ⅰ一端相连,联轴器Ⅰ另一端通过螺钉与车轮固定安装,车轮直径为5-300mm,所述平衡轮电机和平衡轮减速器均与支架的水平板固定安装,所述平衡轮连接管变形锁定装置Ⅰ包括固定板,固定板沿长度方向一端侧壁为阶梯状,固定板最窄段加工有圆弧端,圆弧端周向均匀开设有卡槽,固定板的圆弧端通过轴与转动板Ⅰ和转动板Ⅱ相连,转动板Ⅰ和转动板Ⅱ延长度方向通过连接板焊接在一起,转动板Ⅰ和转动板Ⅱ之间通过转轴安装有锁杆,锁杆侧壁一端设置有与卡槽配合的卡块,锁杆侧壁另一端与连接板之间固定安装有第二弹簧,转动板Ⅰ和转动板Ⅱ上均开设有豁口,平衡轮连接管变形锁定装置Ⅰ通过固定板与后轮组的后轴固定安装,平衡轮连接管变形锁定装置Ⅰ通过转动板Ⅰ和转动板Ⅱ与平衡轮连接管Ⅰ一端相连,平衡轮连接管Ⅰ另一端与支架水平板末端焊接。
所述可变形辅助平衡系统B包括与平衡轮Ⅰ结构相同的平衡轮Ⅱ、伸缩机构Ⅰ和伸缩机构Ⅱ,伸缩机构Ⅰ和伸缩机构Ⅱ结构相同,均包括连接管Ⅰ、连接管Ⅱ、伸缩杆Ⅰ、伸缩杆Ⅱ,丝杆Ⅰ、丝杆Ⅱ、变形电机Ⅰ、变形电机Ⅱ、联轴器Ⅱ、联轴器Ⅲ、定位板Ⅰ、定位板Ⅱ、滑块Ⅰ和滑块Ⅱ,所述伸缩机构Ⅰ和伸缩机构Ⅱ均通过连接管Ⅰ一端与后轮组的后轴固定安装,且伸缩机构Ⅰ和伸缩机构Ⅱ以后轮组为对称中心,所述连接管Ⅰ内腔安装有变形电机Ⅰ,变形电机Ⅰ输出端通过联轴器Ⅱ与丝杆Ⅰ相连,丝杆Ⅰ贯穿连接管Ⅰ内的定位板Ⅰ与伸缩杆Ⅰ相连,起到支撑丝杆的作用,伸缩杆Ⅰ通过其上的滑块与连接管Ⅰ上的滑槽配合,伸缩杆Ⅰ伸出端与连接管Ⅱ一端相连,连接管Ⅱ内腔安装有变形电机Ⅱ,变形电机Ⅱ输出端通过联轴器Ⅲ与丝杆Ⅱ相连,丝杆Ⅱ贯穿连接管Ⅱ内的定位板Ⅱ与伸缩杆Ⅱ相连,起到支撑丝杆的作用,伸缩杆Ⅱ通过其上的滑块与连接管Ⅱ上的滑槽配合,伸缩杆Ⅱ末端与平衡轮Ⅱ的支架固定安装。
所述自主导航行走系统包括双目深度相机、激光雷达、平衡轮电机控制器、平衡轮电机编码器、平衡轮电机驱动器、变形电机控制器、变形电机编码器、变形电机驱动器、上位机、卫星定位模块、GPRS无线通信模块、陀螺仪、触摸屏、行走系统启动按键、变形机构启动展开按键、变形机构启动收缩按键、蓄电池和控制箱,所述控制箱顶板上表面安装有激光雷达,所述控制箱的顶部侧壁外表面安装有双目视觉相机,控制箱的顶部侧壁上安装有触摸屏、行走系统启动按键、变形机构启动展开按键和变形机构启动收缩按键,所述控制箱内安装有蓄电池、上位机、陀螺仪、卫星定位模块和GPRS无线通讯模块,所述上位机分别与蓄电池、双目深度相机、激光雷达、平衡轮电机控制器、变形电机控制器、卫星定位模块、GPRS无线通讯模块、陀螺仪、行走系统启动按键、变形机构启动展开按键、变形机构启动收缩按键和触摸屏电连接,所述平衡轮电机控制器分别与平衡轮电机驱动器和平衡轮电机编码器电连接,所述变形电机控制器分别与变形电机驱动器和变形电机编码器电连接,所述自主导航行走系统通过互联网与后台服务器通信,自行走时采用卫星定位模块进行定位,采用车载陀螺仪的磁传感器输出进行位姿计算。
在自行走时,所述后轮组为前进轮组,前轮组位于后轮组的后方,所述两个平衡轮Ⅰ或两个平衡轮Ⅱ为驱动轮,通过两个平衡轮Ⅰ或两个平衡轮Ⅱ的速度差实现转向。
本实用新型的有益效果为:
1、整合了三轮足的稳定性和双轮足的便于骑行的特性。有骑行需求时,可快速切换到双轮足状态。使用完毕后,可快速切换到稳定的三轮足自行走状态。可根据使用者的预约提前到达约定地点,节省了使用者的大量时间。变形至自主行走状态后,可自动返回到附近的基地,从根本上解决了现有单车乱停乱放的问题。基地可位于远离商场、学校、地铁口等繁华地段,释放了宝贵公共空间,降低了存放费用。供需一对一匹配,一改以往的过量投放方式,单车供应量可成倍降低,高效利用了物质资源。
2、车把通过车把变形锁定装置具有90度变形锁定功能,以减少存放时占用更多的空间,降低行走过程中的空气阻力。
3、平衡轮和车体的连接杆可变形,平衡轮变形后可位于轮组360圆周角的任何角度内。
附图说明
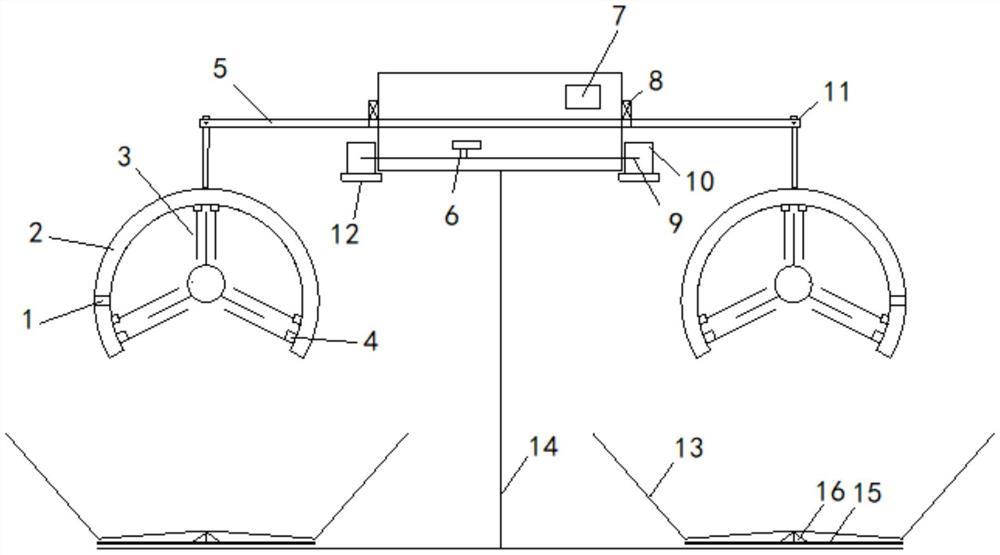
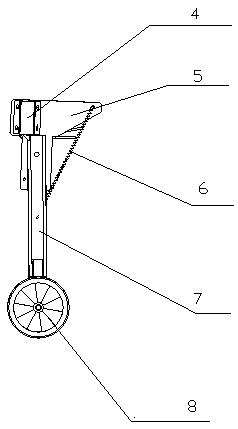
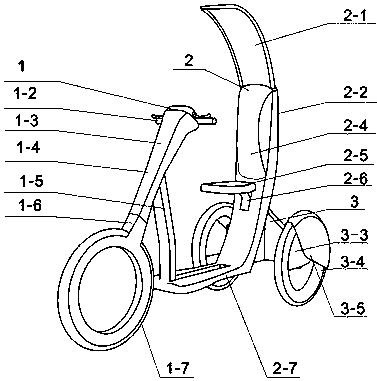
图1为手动变形辅助平衡轮的轮足机器人结构主视图;
图2为手动变形辅助平衡轮的轮足机器人结构左视图;
图3为手动变形辅助平衡轮的轮足机器人结构俯视图;
图4为自动变形辅助平衡轮的轮足机器人结构主视图;
图5为自动变形辅助平衡轮的轮足机器人结构左视图;
图6为手动变形辅助平衡轮的轮足机器人自主行走状态主视图;
图7为手动变形辅助平衡轮的轮足机器人自主行走状态左视图;
图8为自动变形辅助平衡轮的轮足机器人变形过程示意图;
图9为本实用新型车把变形锁定装置结构示意图;
图10为本实用新型车把变形锁定装置的连接杆俯视图;
图11为本实用新型车把变形锁定装置的连接杆仰视图;
图12为本实用新型车把变形锁定装置的连接管Ⅲ示意图;
图13为本实用新型平衡轮连接管变形锁定装置Ⅰ锁定状态一结构示意图;
图14为本实用新型平衡轮连接管变形锁定装置Ⅰ锁定状态二结构示意图;
图15为本实用新型平衡轮连接管变形锁定装置Ⅰ侧视图;
图16为本实用新型平衡轮连接管变形锁定装置Ⅱ结构示意图;
图17为本实用新型平衡轮连接管变形锁定装置Ⅱ的滑块部分结构示意图;
图18为本实用新型平衡轮结构示意图;
图19为本实用新型平衡轮a-a示意图;
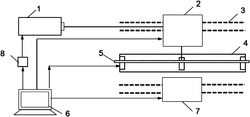
图20为变形电机和平衡轮电机控制逻辑图;
图21为自主导航流程图;
图22为基地及道路结构示意图;
1-前叉,2-头管,3-前叉上管,4-车把,5-上管,6-车座,7-立管,8-立叉,9-座管,10-下管,11-前轮组,12-曲柄,13-脚踏,14-后叉,15-车把变形锁定装置,1501-连接杆,1502-连接管Ⅲ,1503-限位板,1504-耳板Ⅰ,1505-圆形孔,1506-长方形孔Ⅰ,1507-转动杆,1508-旋转手柄,1509-锁舌,1510-第一弹簧,1511-耳板Ⅱ,1512-耳板Ⅲ,1513-长方形孔Ⅱ,16-链条,17-后轮组,18-水平架,19-平衡轮Ⅰ,20-车轮,21-支架,22-平衡轮减速器,23-平衡轮电机,24-联轴器Ⅰ,25-螺钉,26-固定板,27-圆弧端,28-卡槽,29-转动板Ⅰ,30-转动板Ⅱ,31-锁杆,32-卡块,33-第二弹簧,34-豁口,35-连接管Ⅰ,36-连接管Ⅱ,37-伸缩杆Ⅰ,38-伸缩杆Ⅱ,39-丝杆Ⅰ,40-丝杆Ⅱ,41-变形电机Ⅰ,42-变形电机Ⅱ,43-联轴器Ⅱ,44-联轴器Ⅲ,45-定位板Ⅰ,46-定位板Ⅱ,47-滑块Ⅰ,48-滑块Ⅱ,49-固定杆Ⅰ,50-固定杆Ⅱ,51-控制箱,52-平衡轮连接管变形锁定装置Ⅰ,53-平衡轮连接管Ⅰ,54-前轮变形锁定装置。
具体实施方式
下面结合附图和实施例对本实用新型作进一步的详细说明。
如图1至图20所示,一种基于可变形辅助平衡系统与差速驱动的轮足机器人,包括可变形辅助平衡系统、机械本体和自主导航行走系统,所述自主导航行走系统位于机械本体上,机械本体的后轮组17通过后轴与可变形辅助平衡系统固定安装。
机械本体包括前叉1、头管2、前叉上管3、车把4、上管5、车座6、立管7、立叉8、座管9、下管10、前轮组11、前轮变形锁定装置54,曲柄中轴机构12、脚踏13、后叉14、车把变形锁定装置15、链条16和后轮组17,所述前叉1一端与前轮组11的前轴固定安装,所述前叉上管3一端插入头管2后与前叉1另一端相连,且前叉上管3与头管2之间安装有前轮变形锁定装置54,本申请中的前轮变形锁定装置54采用的是专利号为201910128359X中的前轮变形锁定装置,前叉上管3另一端通过车把变形锁定装置15与车把4固定安装,头管2侧壁分别与上管5和下管10一端焊接,上管5另一端与座管9侧壁焊接,座管9侧壁还与水平架18和立叉8一端焊接,水平架18另一端与立管7一端焊接,所述座管9一端安装有车座6,座管9与下管10另一端均与曲柄12的中轴安装管侧壁焊接,所述曲柄12上安装有脚踏13,曲柄12的中轴安装管侧壁还与后叉14一端焊接,后叉14、立叉8和立管7另一端均与后轮组17的后轴固定安装,所述后轮组17上安装有可变形辅助平衡系统,曲柄中轴机构12的牙盘与后轮组17通过链条16相连。
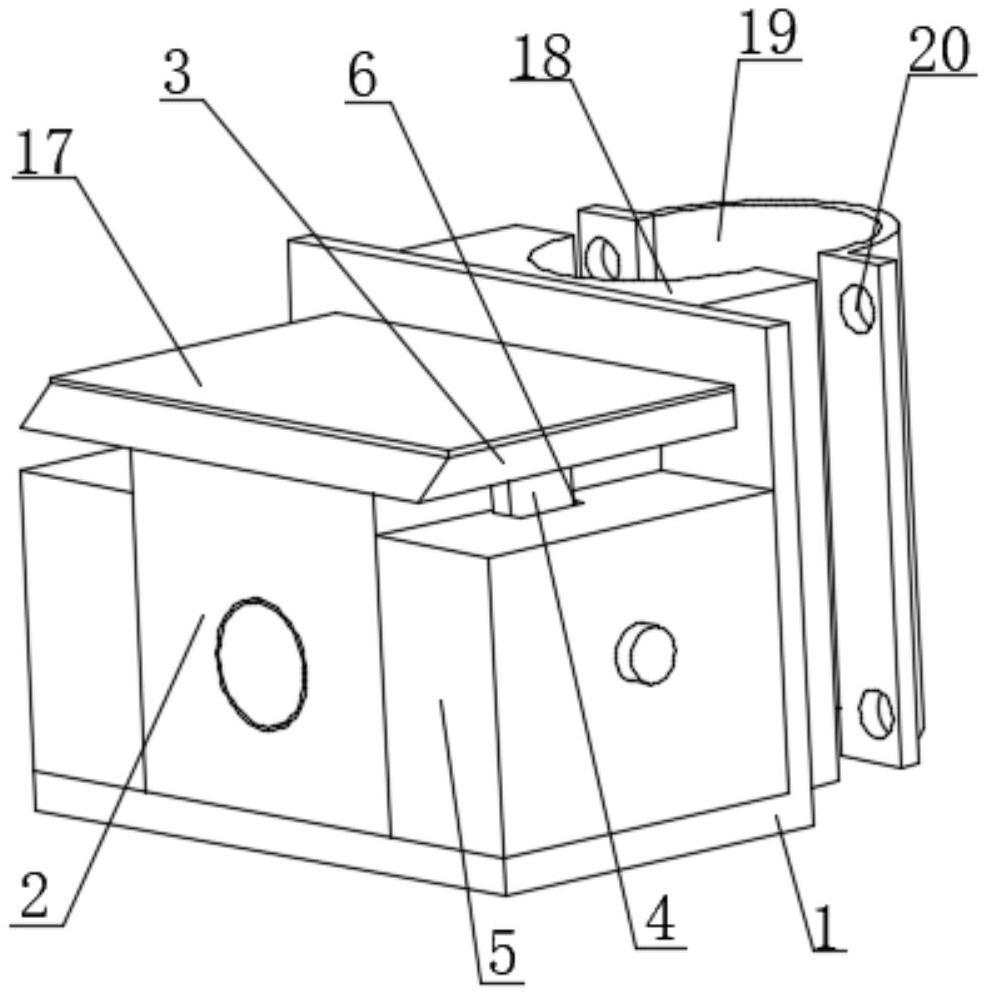
所述车把变形锁定装置15包括连接杆1501和连接管Ⅲ1502,连接杆1501的阶梯轴部分插入连接管Ⅲ1502的阶梯孔内,连接杆1501末端固定安装有限位板1503使连接杆1501与连接管Ⅲ1502转动安装,限位板1503通过螺钉与连接杆1501固定安装,限位板1503防止连接杆1501在连接管Ⅲ1502上脱落,连接杆1501外壁焊接有耳板Ⅰ1504,耳板Ⅰ1504为内部中空的结构,耳板Ⅰ1504的顶部侧壁开设有圆形孔1505,耳板Ⅰ1504底部侧壁开设有长方形孔Ⅰ1506,所述圆形孔1505内穿插有转动杆1507,转动杆1507位于耳板Ⅰ1504顶部侧壁外侧一端与旋转手柄1508固定安装,转动杆1501另一端与锁舌1509相连,耳板Ⅰ1504内腔顶部内侧壁与锁舌1509之间固定安装有第一弹簧1510,连接管Ⅲ1502外壁焊接有耳板Ⅱ1511和耳板Ⅲ1512,且耳板Ⅱ1511和耳板Ⅲ1512呈90°设置,耳板Ⅱ1511和耳板Ⅲ1512上均设置有与圆形孔1505同中心线的长方形孔Ⅱ1513,连接杆1501通过锁舌1509穿过连接管Ⅲ1502的耳板Ⅱ1511或耳板Ⅲ1512与连接管Ⅲ1502固定,所述车把变形锁定装置15的连接杆1501与车把4焊接,车把变形锁定装置15的连接管Ⅲ1502与前叉上管3焊接,锁舌1509的形状为长方形,且锁舌的尺寸小于长方形孔Ⅰ1506和长方形孔Ⅱ1513的尺寸,便于锁舌穿过长方形孔Ⅰ1506和长方形孔Ⅱ1513。
车把变形锁定装置15为手动变形,车把4从与上管5之间垂直设置转为平行设置,首先通过旋转手柄1508转动转动杆1507,使锁舌1509与耳板Ⅱ1511上的长方形孔Ⅱ1513平行,锁舌1509在第一弹簧1510的作用下收回至耳板Ⅰ1504内腔,此时连接杆1501可以在转动管Ⅲ1502内任意转动,骑行者手动旋转车把4,使车把4转动90°与上管5水平设置,此时耳板Ⅰ1504转动至与耳板Ⅲ1512正上方,下压旋转手柄1508使锁舌1509依次穿过耳板Ⅰ1504上的长方形孔Ⅰ1506和耳板Ⅲ1512上的长方形孔Ⅱ1513,之后转动旋转手柄1508使锁舌1509与长方形孔Ⅱ1513垂直设置,车把4被锁定;车把4从与上管5之间平行设置转为垂直设置,首先通过旋转手柄1508转动转动杆1507,使锁舌1509与耳板Ⅲ1512上的长方形孔Ⅱ1513平行,锁舌1509在第一弹簧1510的作用下收回至耳板Ⅰ1504内腔,此时连接杆1501可以在转动管Ⅲ1502内任意转动,骑行者手动旋转车把4,使车把4转动90°与上管5垂直设置,此时耳板Ⅰ1504与耳板Ⅱ1511正上方,下压旋转手柄1508使锁舌1509依次穿过耳板Ⅰ1504上的长方形孔Ⅰ1506和耳板Ⅱ1511上的长方形孔Ⅱ1513,之后转动旋转手柄1508使锁舌1509与耳板Ⅱ1511上的长方形孔Ⅱ1513垂直设置,车把4被锁定。
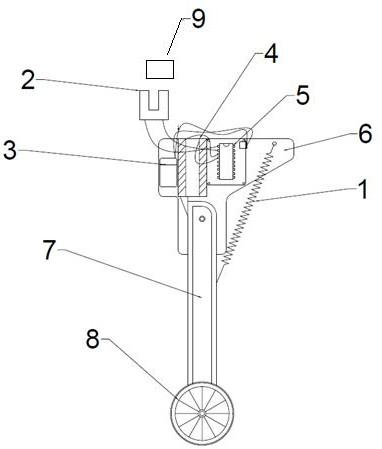
所述可变形辅助平衡系统分为可变形辅助平衡系统A和可变形辅助平衡系统B,所述可变形辅助平衡系统A包括平衡轮Ⅰ19和平衡轮连接管变形锁定装置Ⅰ,所述平衡轮Ⅰ19包括车轮20、支架21、平衡轮减速器22、平衡轮电机23、联轴器Ⅰ24和螺钉25,所述平衡轮电机23采用轮边电机或轮毂电机,平衡轮电机23输出端与平衡轮减速器22输入端相连,平衡轮减速器22输出轴贯穿支架21的竖直板且末端与联轴器Ⅰ24一端相连,联轴器Ⅰ24另一端伸入车轮20大孔内,车轮20小孔内穿插有螺钉25,螺钉25与联轴器Ⅰ24另一端螺接固定车轮20,车轮20直径为5-300mm,所述平衡轮电机23和平衡轮减速器22均与支架21的水平板固定安装,所述平衡轮电机23上安装有平衡轮电机编码器,所述平衡轮连接管变形锁定装置Ⅰ包括固定板26,固定板26沿长度方向一端侧壁为阶梯状,固定板26最窄段加工有圆弧端27,圆弧端27周向均匀开设有卡槽28,分别为卡槽一和卡槽二,固定板26的圆弧端27通过轴与转动板Ⅰ29和转动板Ⅱ30相连,转动板Ⅰ29和转动板Ⅱ30延长度方向通过连接板焊接在一起,转动板Ⅰ29和转动板Ⅱ30之间通过转轴安装有锁杆31,锁杆31侧壁一端设置有与卡槽28配合的卡块32,锁杆31侧壁另一端与连接板之间固定安装有第二弹簧33,转动板Ⅰ29和转动板Ⅱ30上均开设有豁口34,两个平衡轮连接管变形锁定装置Ⅰ通过固定板26与后轮组17后轴的两端固定安装,平衡轮连接管变形锁定装置Ⅰ通过转动板Ⅰ29和转动板Ⅱ30与平衡轮连接管Ⅰ一端相连,平衡轮连接管Ⅰ另一端与支架21水平板末端焊接。
可变形辅助平衡系统A为手动变形锁定,当轮足机器人由骑行状态变为自主行走状态时,骑行者通过豁口34按下锁杆31,锁杆31与第二弹簧33连接端向第二弹簧33一侧转动,锁杆31上的卡块32与卡槽一脱离,此时第二弹簧33收缩,转动转动板使平衡轮Ⅰ19转动至地面,此时平衡轮Ⅰ19转动角度为90°,松开锁杆31,锁杆31上的卡块32和卡槽一相邻的卡槽二配合锁定平衡轮Ⅰ19,平衡轮Ⅰ19落下;当轮足机器人由自行走状态变为骑行状态时,骑行者通过豁口34按下锁杆31,锁杆31与第二弹簧33连接端向第二弹簧33一侧转动,锁杆31上的卡块32与卡槽二脱离,此时第二弹簧33收缩,转动转动板使平衡轮Ⅰ19与地面脱离,此时平衡轮Ⅰ19反向转动角度为90°,松开锁杆31,锁杆31上的卡块32和卡槽二相邻的卡槽一配合锁定平衡轮Ⅰ19,平衡轮Ⅰ19抬起。
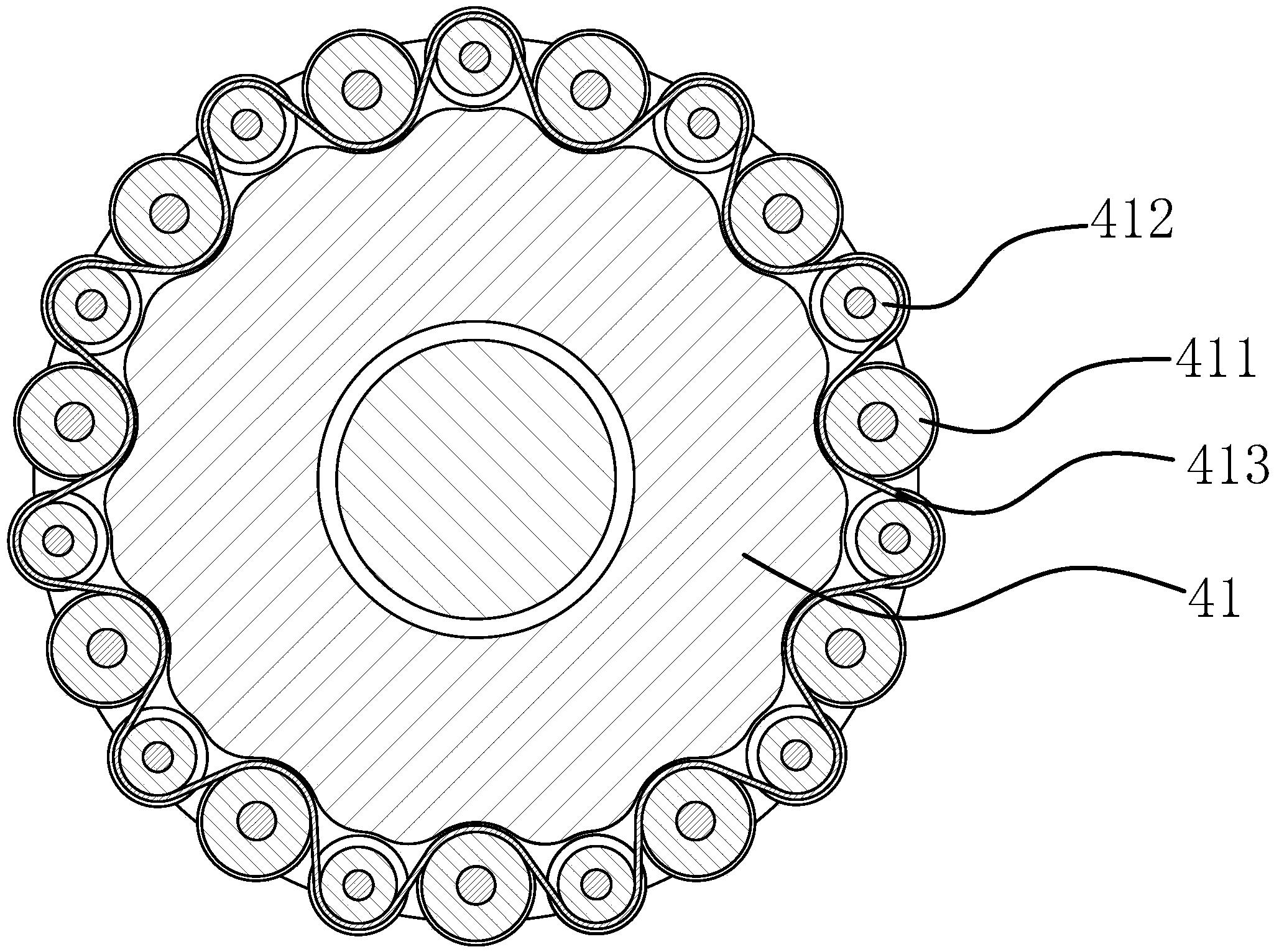
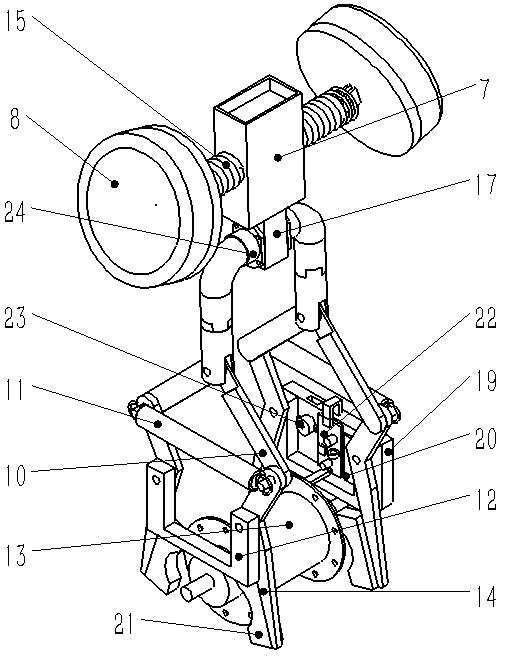
所述可变形辅助平衡系统B包括与平衡轮Ⅰ19结构相同的平衡轮Ⅱ、伸缩机构Ⅰ和伸缩机构Ⅱ,伸缩机构Ⅰ和伸缩机构Ⅱ结构相同,均包括连接管Ⅰ35、连接管Ⅱ36、伸缩杆Ⅰ37、伸缩杆Ⅱ38,丝杆Ⅰ39、丝杆Ⅱ40、变形电机Ⅰ41、变形电机Ⅱ42、联轴器Ⅱ43、联轴器Ⅲ44、定位板Ⅰ45、定位板Ⅱ46、滑块Ⅰ47和滑块Ⅱ48,所述伸缩机构Ⅰ和伸缩机构Ⅱ分别通过连接管Ⅰ35与后轮组17的后轴两端固定安装,且伸缩机构Ⅰ和伸缩机构Ⅱ以后轮组17为对称中心,所述连接管Ⅰ35内腔安装有变形电机Ⅰ41,变形电机Ⅰ41上安装有变形电机编码器Ⅰ,变形电机Ⅰ41输出端通过联轴器Ⅱ43与丝杆Ⅰ39相连,丝杆Ⅰ39贯穿连接管Ⅰ35内的定位板Ⅰ45与伸缩杆Ⅰ37相连,起到支撑丝杆38的作用,连接管Ⅰ36一端与两个固定杆Ⅰ49一端焊接,两个固定杆Ⅰ49对称设置,固定杆Ⅰ49贯穿伸缩杆Ⅰ37滑块Ⅰ47上的通孔与伸缩杆Ⅰ37滑动安装,伸缩杆Ⅰ37伸出端与连接管Ⅱ36一端相连,连接管Ⅱ36内腔安装有变形电机Ⅱ42,变形电机Ⅱ42上安装有变形电机编码器Ⅱ,变形电机Ⅱ42输出端通过联轴器Ⅲ44与丝杆Ⅱ40相连,丝杆Ⅱ40贯穿连接管Ⅱ36内的定位板Ⅱ46与伸缩杆Ⅱ38相连,起到支撑丝杆38的作用,连接管Ⅱ37一端与两个固定杆Ⅱ50一端焊接,且两个固定杆Ⅱ50对称设置,固定杆Ⅱ50贯穿伸缩杆Ⅱ38滑块Ⅱ48上的通孔与伸缩杆Ⅱ38滑动安装,固定杆Ⅰ49和固定杆Ⅱ50另一端均设置有限位块,伸缩杆Ⅱ38末端与平衡轮Ⅱ的支架21固定安装,此时所述变形辅助平衡系统B在自行走时由两个平衡轮Ⅱ驱动。
所述可变形辅助平衡系统B包括与平衡轮Ⅰ19结构相同的平衡轮Ⅱ、伸缩机构Ⅰ,所述伸缩机构Ⅰ通过连接管Ⅰ35一端与后轮组17的后轴一端固定安装,伸缩机构Ⅰ通过伸缩杆Ⅱ末端与平衡轮Ⅱ的支架21固定安装,并在后轮组的后轴与后轮圈之间安装有轮毂电机,此时所述变形辅助平衡系统B在自行走时由一个平衡轮Ⅱ和后轮组同时驱动。
可变形辅助平衡系统B为自动变形锁定,当轮组机器人从骑行状态变为自主行走状态时,骑行者通过变形机构启动展开按键或者触摸屏输入指令给变形电机控制器,变形电机控制器同时发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,两个变形电机驱动器Ⅰ同时驱动两个变形电机Ⅰ41正转,变形电机Ⅰ41带动丝杆Ⅰ39旋转,丝杆Ⅰ39旋转使伸缩杆Ⅰ37从连接管Ⅰ35的孔内移出,当定时器到达定时时间后反馈信号给变形电机控制器,变形电机控制器同时发送停止指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,变形电机Ⅰ41停止工作,伸缩杆Ⅰ37移动到位,同时变形电机控制器发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅱ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,变形电机驱动器Ⅱ驱动变形电机Ⅱ42正转,变形电机Ⅱ42带动丝杆Ⅱ40旋转,使伸缩杆Ⅱ38从连接管Ⅱ36的孔内移出,当定时器达到定时时间后反馈信号给变形电机控制器,变形电机控制器同时发送停止指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅱ,变形电机Ⅱ42停止工作,平衡轮Ⅱ与地面接触,可变形辅助平衡系统B变形锁定完成,此时后轮组17被抬起,可变形辅助平衡系统B仅在后轮组的单侧设置平衡轮时,为一种更简洁方式;当平衡轮处于展开状态时,单侧平衡轮的最低点与后轮的最低点处于同一水平面;后轮组设置轮毂电机,后轮组与单侧平衡轮形成差分(差速)驱动。
当轮足机器人从自行走状态变为骑行状态时;骑行者通过变形机构启动收缩按键或者触摸屏输入指令给变形电机控制器,变形电机控制器发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅱ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,变形电机驱动器Ⅱ驱动变形电机Ⅱ42反转,变形电机Ⅱ42带动丝杆Ⅱ40旋转,使伸缩杆Ⅱ38移入连接管Ⅱ36内,当定时器到达定时时间后反馈信号给变形电机控制器,变形电机控制器发送停止指令给变形电机驱动器,变形电机停止工作,伸缩杆Ⅱ38移动到位,同时变形电机控制器发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,变形电机驱动器Ⅰ驱动变形电机Ⅰ41反转,变形电机Ⅰ41带动丝杆Ⅰ39旋转,使伸缩杆Ⅰ37移入连接管Ⅰ35内,当定时器达到定时时间后反馈信号给变形电机控制器,变形电机控制器发送停止指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,变形电机Ⅰ41停止工作,平衡轮Ⅱ与地面脱离。
所述自主导航行走系统包括双目深度相机、激光雷达、平衡轮电机控制器、平衡轮电机编码器、平衡轮电机驱动器、变形电机控制器、变形电机编码器、变形电机驱动器、上位机、卫星定位模块、GPRS无线通信模块(向后台发送交车和泊车指令)、陀螺仪(确定自身方向)、触摸屏、行走系统启动按键、变形机构启动展开按键、变形机构启动收缩按键、蓄电池和控制箱51,自主导航行走系统通过控制箱51安装于机械本体水平架18的顶部,所述控制箱51的顶部侧壁外表面安装有双目视觉相机,控制箱51的顶部侧壁上安装有触摸屏、行走系统启动按键、变形机构启动展开按键和变形机构启动收缩按键,控制箱51顶板上表面安装有激光雷达,所述控制箱51内安装有蓄电池、上位机、陀螺仪、卫星定位模块和GPRS无线通讯模块,所述上位机分别与蓄电池、双目深度相机、激光雷达、平衡轮电机控制器、变形电机控制器、卫星定位模块、GPRS无线通讯模块、陀螺仪、行走系统启动按键、变形机构启动展开按键、变形机构启动收缩按键和触摸屏电连接,所述平衡轮电机控制器分别与平衡轮电机驱动器和平衡轮电机编码器电连接,所述变形电机控制器分别与变形电机驱动器和变形电机编码器电连接,所述自主导航行走系统通过互联网与后台服务器通信,自行走时采用卫星定位模块进行定位,采用车载陀螺仪的磁传感器输出进行位姿计算;本实施中的双目深度相机型号为:D435,激光雷达型号为:SIMO-LS-205,陀螺仪采用九轴陀螺仪,型号为:mpu9250,卫星定位模块采用GPS卫星定位模块,平衡轮电机控制器与变形电机控制器型号均采用stm32控制器,平衡轮电机23型号为MD-36N,变形电机Ⅰ41和变形电机Ⅱ42型号均为:42BYGH34-401A,平衡轮电机编码器和变形电机编码器均采用霍尔编码器,平衡轮电机驱动器型号为:zm-6615,变形电机驱动器型号均为:fmdd50d40nom。
在自行走时,所述后轮组17为前进轮组,前轮组11位于后轮组17的后方,所述两个平衡轮Ⅰ19或两个平衡轮Ⅱ为驱动轮,通过两个平衡轮Ⅰ19或两个平衡轮Ⅱ的速度差实现转向。
轮足机器人的具体工作原理如下:使用者通过手机或PC机登陆轮足机器人使用系统,提交具体的使用时间、使用地点、使用车型需求信息,并通过手机或PC机将需求信息提交至后台控制中心,后台控制中心将需求信息发送至距离使用地点最近的某基地的空闲轮足机器人的自主导航行走系统,接收信息的轮足机器人自主启动导航行走系统,根据目的地和自身的卫星定位信息进行路径规划,向目的地进发,双目深度相机和激光雷达采集路况信息,实时反馈给上位机,上位机控制可变形辅助平衡系统进而完成自主避障,不断更新自身卫星位置信息,直到到达指定地点。当骑行者选择的为手动轮组机器人时,骑行者通过豁口34按下锁杆31,锁杆31与第二弹簧33连接端向第二弹簧33一侧转动,锁杆31上的卡块32与卡槽二脱离,此时第二弹簧33收缩,转动转动板使平衡轮Ⅰ19与地面脱离,此时平衡轮Ⅰ19反向转动角度为90°,松开锁杆31,锁杆31上的卡块32和卡槽二相邻的卡槽一配合锁定平衡轮Ⅰ19,当骑行者选择的为自动轮足机器人时,可变形辅助平衡系统B为自动变形锁定,骑行者通过变形机构启动收缩按键或者触摸屏输入指令给变形电机控制器,变形电机控制器发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅱ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,变形电机驱动器Ⅱ驱动变形电机Ⅱ42反转,变形电机Ⅱ42带动丝杆Ⅱ40旋转,使伸缩杆Ⅱ41移入连接管Ⅱ36内,当定时器到达定时时间后反馈信号给变形电机控制器,变形电机控制器发送停止指令给变形电机驱动器,变形电机停止工作,伸缩杆37移动到位,同时变形电机控制器发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,变形电机驱动器Ⅰ驱动变形电机Ⅰ41反转,变形电机Ⅰ41带动丝杆Ⅰ39旋转,使伸缩杆Ⅰ37移入连接管Ⅰ35内,当定时器达到定时时间后反馈信号给变形电机控制器,变形电机控制器发送停止指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,变形电机Ⅰ41停止工作,平衡轮Ⅱ与地面脱离,此时后轮组17与地面接触,打开前轮变形锁定装置54,轮足机器人从自行走状态变为可骑行状态,骑行者通过驾驶轮组机器人到达预计的地点,轮足机器人自行走过程中或被骑行过程中,不断通过卫星定位模块和双目深度相机对自身位置进行定位,并通过GPRS无线通信模块发送给后台控制中心。
骑行者到达目的地后,当骑行者选择的为手动轮组机器人时,骑行者通过豁口34按下锁杆31,锁杆31与第二弹簧33连接端向第二弹簧33一侧转动,锁杆31上的卡块32与卡槽一脱离,此时第二弹簧33收缩,转动转动板使平衡轮Ⅰ19转动至地面,此时平衡轮Ⅰ19转动角度为90°,松开锁杆31,锁杆31上的卡块32和卡槽一相邻的卡槽二配合锁定平衡轮Ⅰ19;当骑行者选择的为自动轮足机器人时,当轮组机器人从骑行状态变为自主行走状态时,骑行者通过变形机构启动展开按键或者触摸屏输入指令给变形电机控制器,变形电机控制器同时发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,两个变形电机驱动器Ⅰ同时驱动两个变形电机Ⅰ41正转,变形电机Ⅰ41带动丝杆Ⅰ39旋转,丝杆Ⅰ39旋转使伸缩杆Ⅰ37从连接管Ⅰ35的孔内移出,当定时器到达定时时间后反馈信号给变形电机控制器,变形电机控制器同时发送停止指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅰ,变形电机Ⅰ41停止工作,伸缩杆Ⅰ37移动到位,同时变形电机控制器发送指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅱ,同时变形电机控制器内的定时器开始计时,定时500ms-1s,变形电机驱动器Ⅱ驱动变形电机Ⅱ42正转,变形电机Ⅱ42带动丝杆Ⅱ40旋转,使伸缩杆Ⅱ38从连接管Ⅱ36的孔内移出,当定时器达到定时时间后反馈信号给变形电机控制器,变形电机控制器同时发送停止指令给伸缩机构Ⅰ和伸缩机构Ⅱ的变形电机驱动器Ⅱ,变形电机Ⅱ42停止工作,平衡轮Ⅱ与地面接触,可变形辅助平衡系统B变形锁定完成,此时后轮组17被抬起,通过前轮变形锁定装置54锁定前轮组,避免在自行走时出现前轮组摆动,整体失稳的情况,此时通过平衡轮提供动力,且后轮组作为前进轮完成自主行走,当自动轮足机器人的辅助平衡轮自动放下并锁定,系统认为骑行者已完成车辆上交,轮足机器人从可骑行状态变为自行走状态,然后骑行者通过触摸屏或按键启动自主行走系统,轮足机器人根据卫星定位模块或双目深度相机对自身位置进行定位,查找附近的基地,进行路径规划,返回至最近的基地。到达基地后,基地工作人员进行回收,或自主在停车场内寻找空间,自主泊车。
具体导航过程如下:
如图21和图22所示,机器人进入自主导航状态后,根据前期已建立的地图,进行路径规划,不断进行自身定位,沿规划路径前进,在遇到障碍物的情况下,自主避障功能启动,绕开障碍物后继续前进,通过上位机搭载的开源ROS-SLAM功能包,如ROB-SLAM完成三维点云建图,路径规划,自主定位,位姿估计,避障等功能;或者借助GPS卫星定位模块进行全局导航结合深度双目相机局部导航的方法完成机器人自主导航。
通过GPS卫星定位模块进行全局导航结合深度双目相机局部导航,具体导航过程如下:
基地远离商场等黄金地段或地铁口等人员密集区,散布于街心花园等公共空间的地上,或在地下开辟专用单车存放空间,以进一步降低对现有空间的影响。骑行者在C18节点提出预约申请,后台控制中心向距离预约节点最近的C3C4C8C9区域的基地的某空闲机器人发出指令,轮足机器人可在工作人员的帮助下,通过触摸屏启动平衡轮,或着轮组机器人接收到后台控制中心发送的启动指令,自主离开基地,进入C4C9路段;
机器人自主导航系统的上位机导入电子地图数据,车载卫星定位系统对机器人当前的位置进行定位,把GPRS无线通信模块接收的目的信息导入地图,则在当前地点和目的地之间在地图上给出路径规划(如图中虚线所示,可采用A*算法),通过计算车载九轴陀螺仪输出的磁场方向与车体前进方向的夹角来确定自身位姿,由双目视觉相机和激光雷达组成的局部导航系统,通过双目深度相机寻找道路的边缘,平衡轮电机控制器发出指令控制平衡轮电机23前进和转向,沿着道路的边缘前进,同时通过激光雷达进行避障。在出现分支的路口,全局导航系统给出转向或继续前进指令,到达指定地点后,利用双目深度相机和激光雷达在指定停车场的单车停车空位停车,然后停止前进,向后台控制中心发送开始等待信息,后台控制中心查询该轮足机器人的卫星定位信息,同时通过网络发布位置信息,供使用者查询,使用者到达预约位置后,可通过查询机器人车身编号(由后台提供),找到预约车辆。
一种基于可变形辅助平衡系统与差速驱动的轮足机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0