








专利摘要
本实用新型公开了一种水面滑行仿生水黾机器人,属于仿生机器人领域,包括机架和滑行腿,机架两侧对称安装有至少3对滑行腿;滑行腿采用直径为0.2mm~0.3mm的铜丝制作而成,一端向上翻折连接在机架的底面,另一端向上翘起成120°~140°;滑行腿的表面采用超疏水材料进行涂覆;机架的前端和后端至少一端安装有螺旋桨及驱动螺旋桨转动的电机;电机胶装在机架上,螺旋桨与电机轴紧配连接。采用铜丝制作滑行腿,可降低加工难度、提高支承稳定性和变形程度,滑行腿的另一端向上翘起,使滑行腿更加平滑地滑行,减小阻力,在运动过程中尽可能地获得较大的运动速度,能够像水黾一样利用水表面的张力在水面上稳定漂浮,该水黾机器人的结构简单、体积小、且制造成本低。
权利要求
1.一种水面滑行仿生水黾机器人,包括机架和滑行腿,其特征在于:
所述的机架的两侧对称安装有至少3对所述的滑行腿;
所述滑行腿采用直径为0.2mm~0.3mm的铜丝制作而成,其一端向上翻折连接在机架的底面,另一端向上翘起成120°~140°;
所述滑行腿的表面采用超疏水材料进行涂覆;
所述机架的前端和/或后端安装有螺旋桨及驱动螺旋桨转动的电机;
所述电机胶装在所述机架上,所述螺旋桨与电机轴紧配连接。
2.根据权利要求1所述的水面滑行仿生水黾机器人,其特征在于:
位于机架同一侧的相邻两个所述的滑行腿之间的角度为15°~20°。
3.根据权利要求1所述的水面滑行仿生水黾机器人,其特征在于:
所述的机架为十字形结构,其厚度为0.18~0.23mm。
4.根据权利要求3所述的水面滑行仿生水黾机器人,其特征在于:
所述的机架由铝片通过线切割处理得到。
5.根据权利要求1所述的水面滑行仿生水黾机器人,其特征在于:
所述的机架的前后两端均安装有所述的螺旋桨及驱动所述螺旋桨转动的电机。
6.根据权利要求5所述的水面滑行仿生水黾机器人,其特征在于:
所述的电机为微型直流电机。
7.根据权利要求1所述的水面滑行仿生水黾机器人,其特征在于:
所述的滑行腿长度为59mm~89mm。
8.根据权利要求1所述的水面滑行仿生水黾机器人,其特征在于:
所述的螺旋桨为双叶螺旋桨,采用薄型塑料制成。
说明书
技术领域
本实用新型涉及仿生机器人领域,具体地说,涉及一种可在水面上滑行的仿生水黾机器人。
背景技术
水黾是一种常见于小河和池塘中的小型水生昆虫,可适应多变的自然环境,可以在水面上进行滑行和跳跃的运动。同时,可以适应水面的波浪和由于各种原因引起的波动而保证腿部不被浸湿,自由行动。这主要都归功于水黾的超疏水性从而能够适应像水面这样的柔性流体非结构环境,不仅不会沉入水中,而且能够快速移动,具有运动灵活,对水面的破坏小,噪声小,隐蔽性极强等特点。这使得仿生水黾机器人在管道内壁的探查、水质监测、环境数据监测、军事侦察等方面得到了广泛的应用。近年来,受水黾水上运动机理的启发,科学家们希望可以研制出一种小型的水面活动机器人,可以像水黾一样,在复杂的自然环境中可以正常作业,同时又足够轻巧和灵活。
公布号为CN102556318A的中国专利文献公开了一种仿生水黾机器人,主要包括机架、对称安装在机架上的前后四条支撑腿和中间左右两条划水腿、舵机组件和控制电路,划水腿包括划水腿划水机构和划水腿抬腿机构,舵机组件包括划水舵机组件和抬腿舵机组件;支撑腿包括依次连接的上连接杆、中连接杆和漂浮支撑腿,上连接杆与机架连接;划水腿划水机构为四杆机构;划水腿抬腿机构为平行四边形机构;划水腿划水机构与划水腿抬腿机构串联安装,并通过控制机构相互配合运动。该发明能够实现水黾的划水动作,负载能力强, 移动速度快,但其效率不高,自身震动较大,并且没有应对风浪的能力。
公布号为CN104229087A的中国专利文献公开了一种仿水黾水面滑行机器人。其包括机架、驱动腿和支撑腿,机架包括底座、轴一、轴二、轴三和轴四,驱动腿包括驱动腿架、轴五、轴六、轴七、轴八、凸轮齿轮、摆腿架、轴九、摆腿、微型直流电机、蜗杆、蜗轮齿轮、双层齿轮和连杆;两条驱动腿对称安装在机架左右两侧,多条支撑腿位于同一水平面上且分别对称固定在机架的前端和后端。该发明用于仿水黾水上运动机器人。该发明解决了现有水面机器人不能从根本上实现对水黾水面滑行运动机理的仿生的问题,但其成本高,制造困难,且安装精度要求高。
实用新型内容
本实用新型的目的为提供一种水面滑行仿生水黾机器人,可实现成本低、体积小、重量轻、结构简单、隐蔽性好、载重余量大等特点。
为了实现上述目的,本实用新型提供的水面滑行仿生水黾机器人包括机架和滑行腿,机架的两侧对称安装有至少3对滑行腿;滑行腿采用直径为0.2mm~0.3mm的铜丝制作而成,其一端向上翻折连接在机架的底面,另一端向上翘起成120°~140°;滑行腿的表面采用超疏水材料进行涂覆;机架的前端和/或后端安装有螺旋桨及驱动螺旋桨转动的电机;电机胶装在机架上,螺旋桨与电机轴紧配连接。
上述技术方案中,水黾机器人的总体重量约4.65g,可搭载1.15g的重量,将滑行腿的安装端向上翻折后连接在机架的底面,其翻折端可以起到支撑机架的作用,易于机架漂浮在水面上。采用铜丝制作滑行腿,可降低加工难度、提高支承稳定性和变形程度,同时,滑行腿的另一端向上翘起,使滑行腿更加平滑地滑行,减小阻力,在运动过程中尽可能地获得较大的运动速度,向上翘起成120°~140°是使得水黾机器人在划水过程中滑行腿不易刺破水面的较佳角度范围,能够像水黾一样利用水表面的张力在水面上稳定地漂浮着,并且进 行滑行运动,表面涂覆疏水性材料以提供足够的表面张力,使其拥有超疏水性能,利用超疏水性腿划动水面进行水面上的滑行,实现模仿水黾在水面上的滑行运动。该水黾机器人的结构简单、体积小、且制造成本低,可广泛应用于军事侦查及水质监测等领域。
作为优选,位于机架同一侧的相邻两个滑行腿之间的角度为15°~20°。设置该角度范围是为了避免因滑行腿太密集或太稀疏而影响滑行效果。
作为优选,机架为十字形结构,其厚度为0.18~0.23mm。十字形结构便于搭载电机及其他微型传感器、微型芯片等,同时方便滑行腿的对称安装。设置0.18~0.23mm的厚度使得机架在保证自身承力范围的情况下更加容易漂浮于水面上。
进一步优选地,机架由铝片通过线切割处理得到。由于机架的形状规整且厚度小,采用线切割可减小成本。
作为优选,机架的前后两端均安装有螺旋桨及驱动螺旋桨转动的电机。两个螺旋桨同时运转,加大滑行动力,使水黾机器人在水中的滑行速度更快。
进一步优选地电机为微型直流电机。微型直流电机的体积小,且其性能完全可以满足搭载着仿生水黾机器人的要求。
作为优选,滑行腿长度为59mm~89mm。该长度范围能达到最佳的滑行效果。
作为优选,螺旋桨为双叶螺旋桨,采用薄型塑料制成。双叶螺旋桨可以正方向驱动,采用薄型塑料制成降低自身重量,使得整体往轻量化分向发展。
整体优选方案,机架的厚度为0.2mm;滑行腿长度为89mm,直径为0.3mm,末尾端部向上翻折成的角度为135°,相邻两滑行腿1间的角度为15°。基于此,本实用新型的水黾机器人的整体机身长12.4cm,宽10.3cm,具备成本低、体积小、重量轻、结构简单、隐蔽性好、载重余量大等优点,体型足够小来适应更加复杂的环境。
与现有技术相比,本实用新型的有益效果为:
本实用新型的水面滑行仿生水黾机器人可实现低成本、微型化水黾机器人 水面滑行的动作。其成本低、体积小、重量轻、结构简单、隐蔽性好、载重余量大的效果,实现了模仿水黾在水面上完成滑行的运动,同时也可以用于研究水黾等其他生物水面运动机理及其仿生学方面的进一步研究。
附图说明
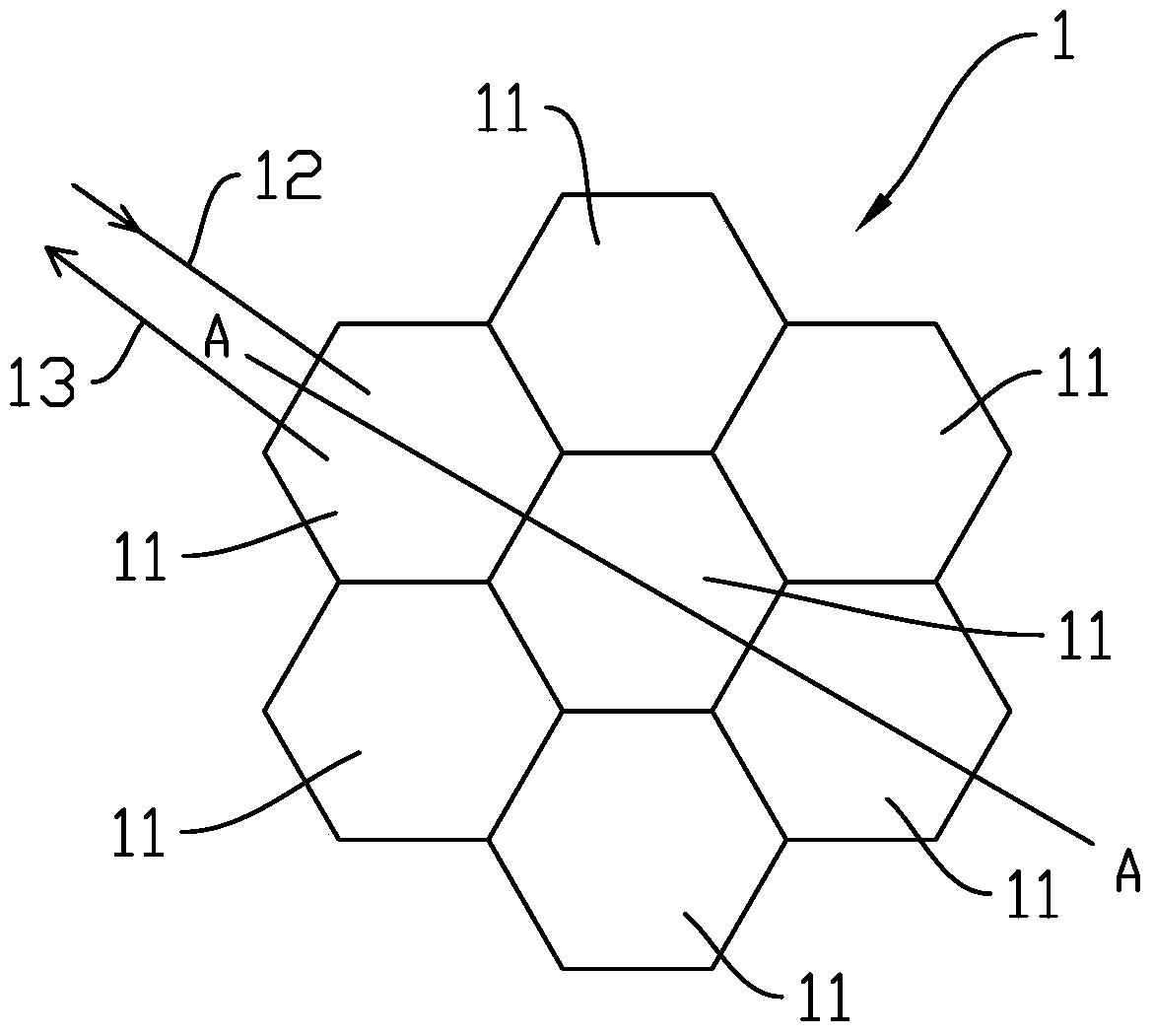
图1为本实用新型实施例的俯视图;
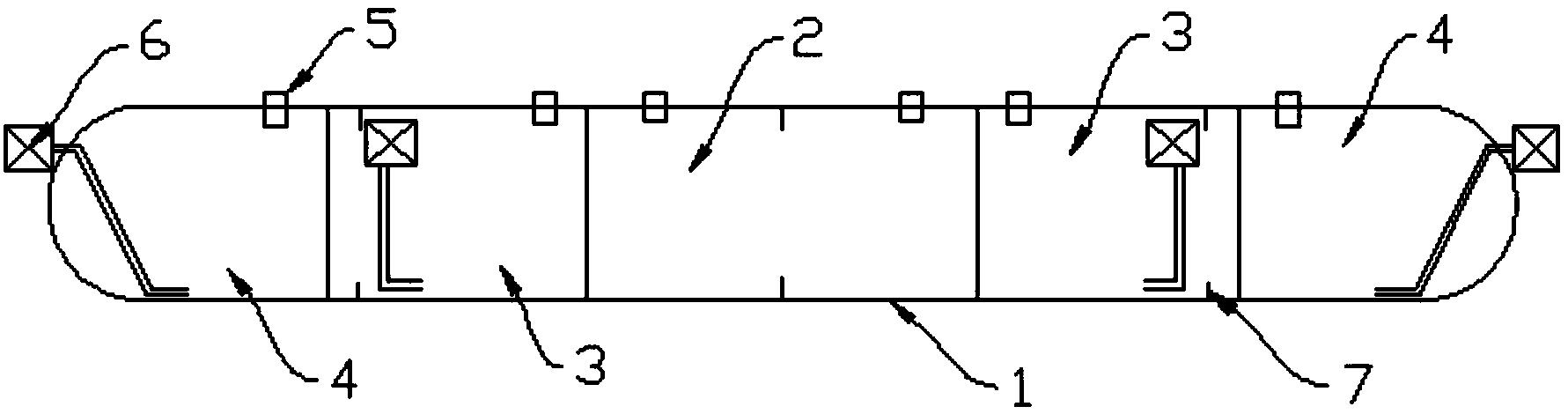
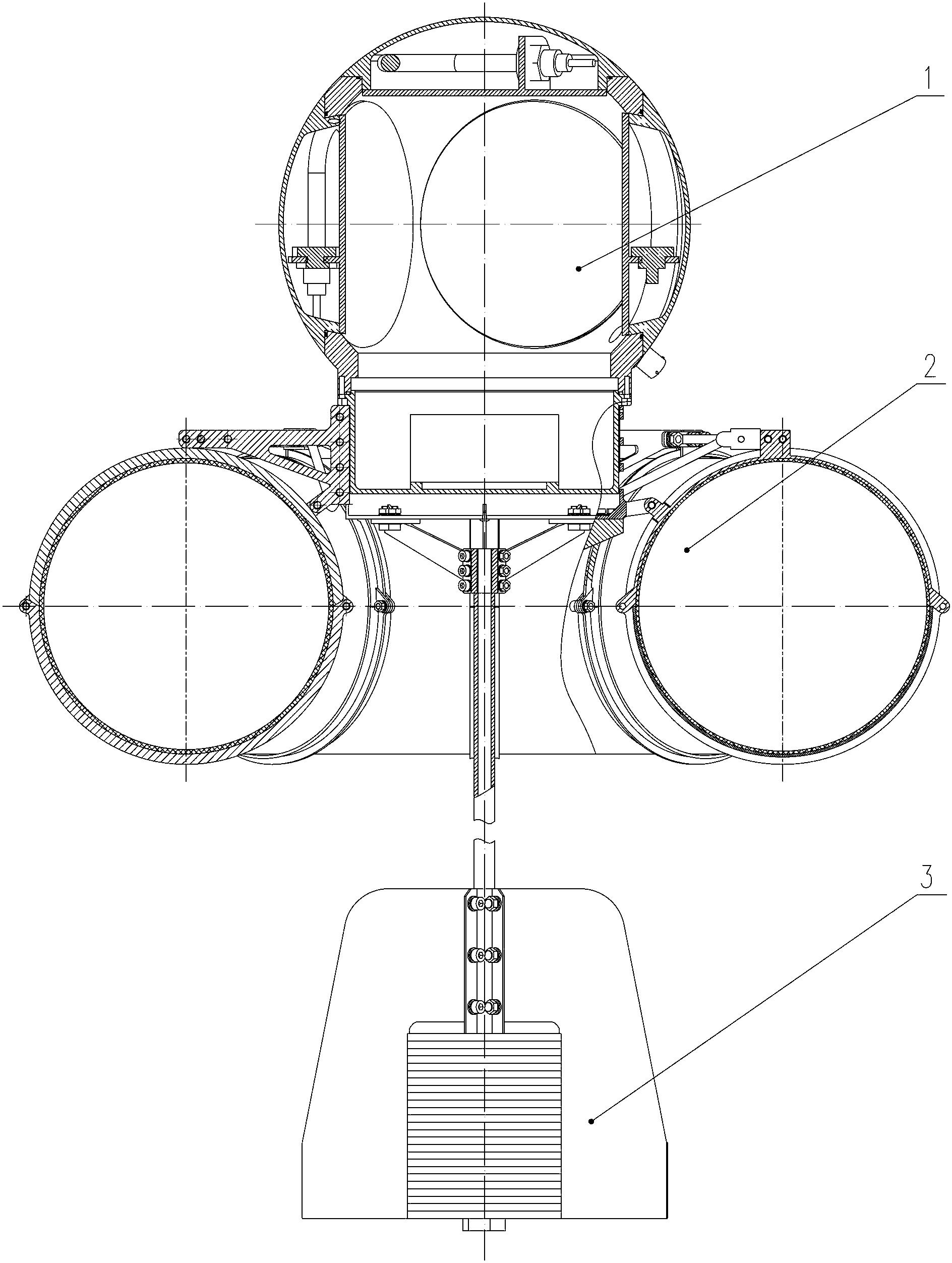
图2为本实用新型实施例的立体图;
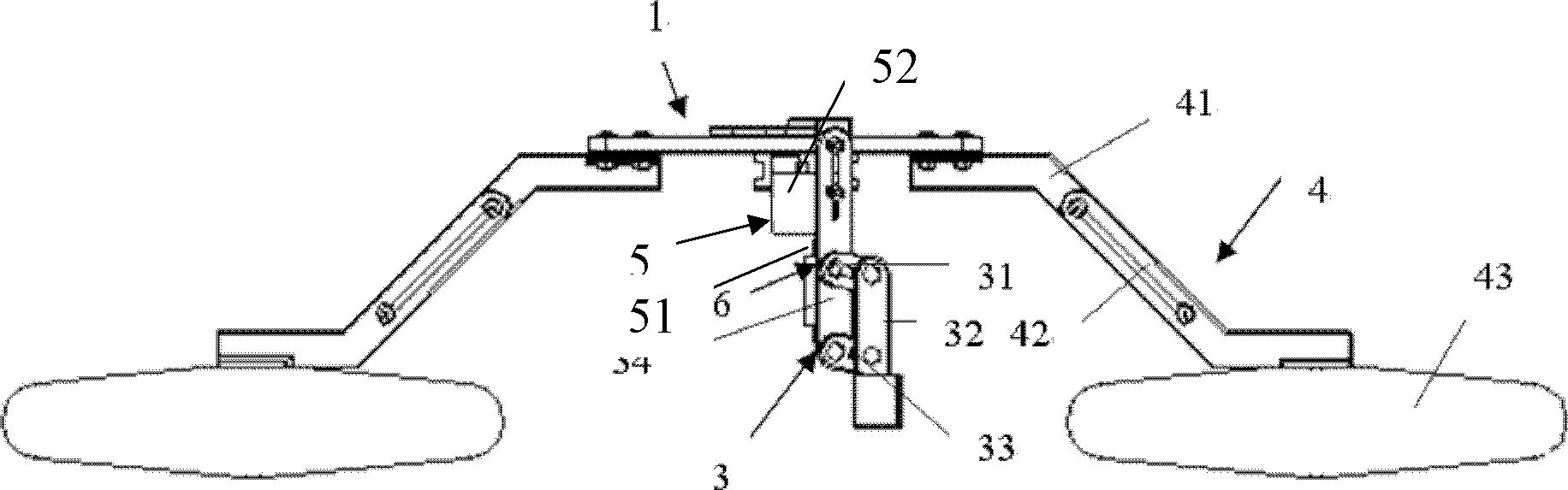
图3为本实用新型实施例的主视图;
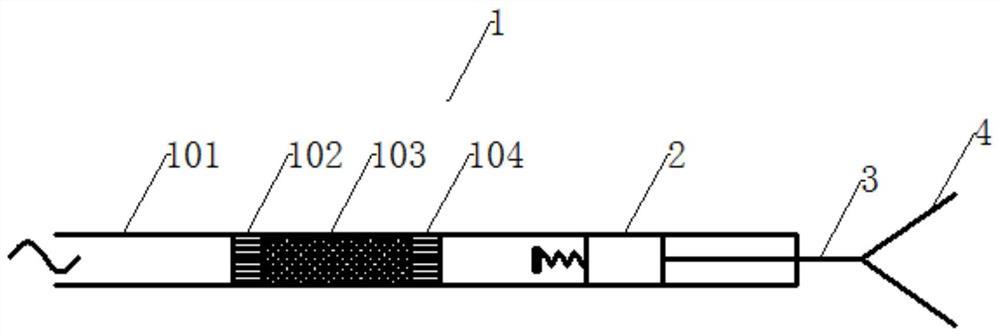
图4为本实用新型实施例的滑行腿的正视图;
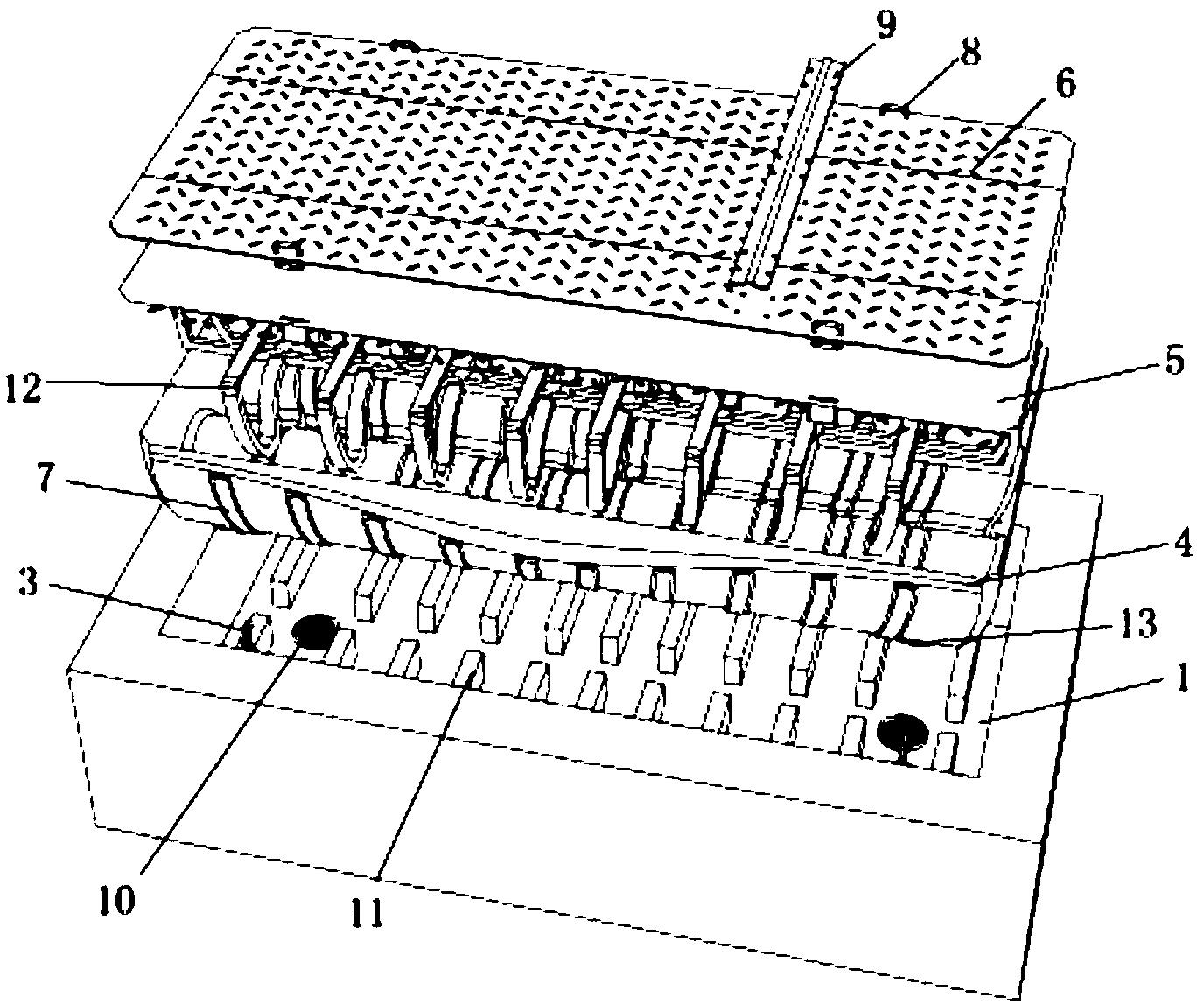
图5为本实用新型实施例的机架示意图。
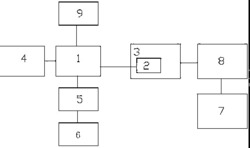
其中:1、滑行腿;2、电机;3、螺旋桨;4、机架。
具体实施方式
以下结合实施例及其附图对本实用新型作进一步说明。
实施例
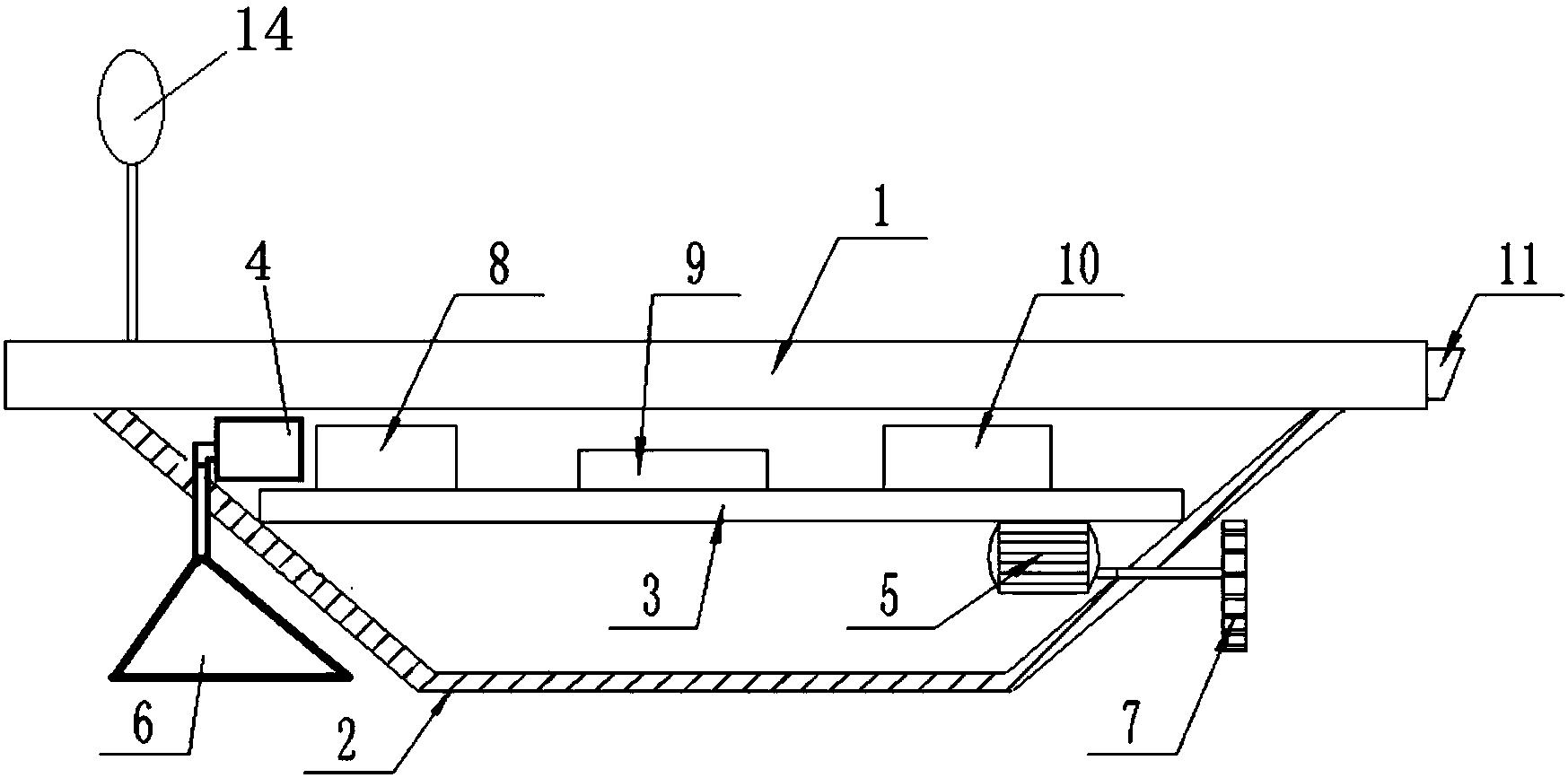
参见图1和图2,水面滑行仿生水黾机器人包括机架4、滑行腿1、螺旋桨3及电机2。其中,滑行腿1对称安装在机架4的左右两侧。螺旋桨3为双叶螺旋桨,并采用轻薄的塑料制作而成,与电机2的输出轴紧配连接。电机2为微型直流电机,并通过胶装固定连接在机架4上,用于驱动螺旋桨3旋转以带动仿生水黾机器人向前滑行。
参见图5,机架4为一个厚0.18~0.23mm的十字形平台,由2mm的铝片做线切割处理得到,十字形结构便于搭载微型电机及其他微型传感器、微型芯片等,同时方便滑行腿1的安装。水黾机器人在水面漂浮状态下,铝制机架在距离水面7mm处。
本实施例中,共设有5对对称分布在机架4的左右两侧的滑行腿1,相邻两滑行腿1间的角度为15°~20°;共设两个电极螺旋桨组,两个电机2分别 胶装在机架4的前后部,两个螺旋桨同时运转,加大滑行动力,使水黾机器人在水中的滑行速度更快。
参见图3和图4,滑行腿1的长度为59mm~89mm,选择0.2mm~0.3mm的铜丝制作而成,且表面经过超疏水材料涂覆处理,综合在水面上所获得的表面张力和自重,单条腿能够提供的支撑力为0.59g。滑行腿1的一端向上翻折90°连接在机架4的底面,另一端向上翻折成120°~140°,以使滑行腿1在流体中更加平滑地滑行,从而减小整体的阻力,在滑行运动过程中尽可能地获得更大的速度。通过实验测量,该水黾机器人在水上能达到最快直线运动速度为6cm/s,最大可耐受波浪为1.5Hz,波高约为10mm。
考虑到疏水性能与表面支撑力两者要达到最大,本实施例设计的滑行腿1长度优选为89mm,直径优选为0.3mm,末尾端部向上翻折成的角度优选为135°,相邻两滑行腿1间的角度优选为15°。基于此,本实施例的水黾机器人整体机身长12.4cm,宽10.3cm。
本实施例的工作过程如下:
将滑行仿生水黾机器人平稳地放置于水域的水面上,通过给搭载在铝制的机架4上的微型直流型的电机2供电,使其驱动与电机2相连的螺旋桨3转动,从而驱动水黾腿1向前滑行,实现水黾机器人水面滑行机理的仿真。
由于铜制滑行腿1表面经过超疏水材料涂覆处理过,因而具有超疏水性,能够给水黾机器人稳定地漂浮在水面上提供尽可能大的支撑力,且这种支撑力主要来自水表面的张力,能够完美地利用表面张力在水面上漂浮,很好的实现对水黾机器人水面漂浮的仿生机理的研究。
在某些特殊的情况下,可以利用水黾机器人搭载微型芯片或者微型传感器实现特定领域的特殊任务,并且本实施例提出的滑行仿生水黾机器人具有成本低、体积小、重量轻、结构简单、隐蔽性好、载重余量大等优点,可以很好的应用于军事侦查及水质监测等领域。
需说明以下几点:
以上所述仅为本实用新型的较佳实施举例,并不用于限制本实用新型的实施方案,凡在本实用新型精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
水面滑行仿生水黾机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0