








专利摘要
一种高精度低成本星光模拟器,由星图模拟计算机、分频器、显示设备、光源系统、液晶显示系统、平行光管组成,其中光源系统主要由凹透镜和面光源组成,星图模拟计算机装有星图模拟算法和基本星表;星图模拟计算机采用星图模拟算法从基本星表中检索出特定视轴和视场下的所有导航星,根据坐标转换原理,计算每颗导航星在液晶显示系统的映射位置,再通过分频器一部分输出到显示设备进行直观显示,另一部分在光源系统的面光源作用下,以一定星体大小和灰度等级在液晶显示系统中显示恒星的分布情况,将液晶显示系统的显示板置于平行光管的焦平面上,这样即可真实地模拟在特定视场和视轴下无穷远处的平行星光。本发明的精度高、成本低,对天文导航系统的研制具有重要价值。
权利要求
1、一种高精度低成本星光模拟器,其特征在于:包括星图模拟计算机(1)、分频器(2)、显示设备(3)、光源系统(4)、液晶显示系统(5)、平行光管(6),星图模拟计算机(1)内装有基本星表(12),它通过星图模拟算法(11)从基本星表(12)中快速检索出特定视轴和视场下的所有导航星,根据坐标转换原理,计算每颗导航星在液晶显示系统(5)的映射位置,再通过分频器(2)一部分输出到显示设备(3)直观显示,另一部分在光源系统(4)作用下,以一定星体大小和灰度等级在液晶显示系统(5)中显示恒星的分布情况,将液晶显示系统(5)的显示板置于平行光管(6)的焦平面上,即可真实地模拟在特定视场和视轴下无穷远处的平行星光。
2、根据权利要求1所述的高精度低成本星光模拟器,其特征在于:所述的星图模拟算法(11)包括快速导航星选取算法、坐标转换模块和显示模块,它具有静态星图和动态星图模拟功能,初始化后进行飞行器运行周期设置,判断是否进行动态模拟,即设置星图模拟速度、星图模拟器的视场范围、星灰度值、星体大小、视场旋转角、基本星表(12)中检索导航星的星等值;如果是则直接进行快速导航星选取算法;如果不进行动态模拟,则进行视场大小设置、设定液晶显示系统(5)的旋转角,并输入天区中心的赤经和赤纬后再进行快速导航星选取算法,再结合基本星表(12)完成检索结果的输出,并将输出的信息根据坐标变换原理,求解出每颗导航星在显示平面上的映射位置,星体显示属性可进行有效性设置;之后判断是否完成模拟,如完成则算法结束,否则返回到飞行器运行周期设置,进行下一循环的模拟。
3、根据权利要求2所述的高精度低成本星光模拟器,其特征在于:所述的快速导航星选取算法采用几何和投影原理,根据当前视轴的赤纬值,结合视场的大小,利用截面圆和固定区域求解赤经跨度的方法确定选取导航星条件,从而完成从基本星表(12)中快速选取导航星。
4、根据权利要求3所述的高精度低成本星光模拟器,其特征在于:所述的利用截面圆和固定区域求解赤经跨度方法为:设平行光管(6)的视场为FOVx×FOVy,通过其看到天球上的区域S的宽为W,高为H,当前视轴指向为(αh,δ0),赤纬等于δ0的赤纬圈称为截面圆,截面圆的半径r=Rsin(90°-δ0),其中R为天球的半径,实际计算时记为单位长度,截面圆的周长L=2Pi×r=2Pi×Rcos(δ0)。则区域S所覆盖截面圆的弧长即在此赤纬下的赤经跨度Rg为:
5、根据权利要求1所述的低成本星光模拟器,其特征在于:所述的基本星表(12)采用Tycho2基本星表、或J2000基本星表或者SAO基本星表,其中基本星表的恒星星等亮于七等星,这些恒星的位置信息经过精确的修正达到0.1角秒精度。
6、根据权利要求1所述的低成本星光模拟器,其特征在于:所述的液晶显示系统(5)由低成本、高分辨率的液晶显示板和相应的驱动板组成,液晶显示板安装在平行光管(6)的焦平面上,做一定程度的离焦处理,实现有效的星光模拟显示,驱动电路的核心部件采用FPGA,利用FPGA执行效率高、驱动液晶显示板简单方便,存取显示数据速度快等特点,在显示板上实现高效的恒星空间分布;液晶显示板的显示面同光源系统(5)的面光源的面相平行,同平行光管(6)的光轴相垂直。
7、根据权利要求1所述的高精度低成本星光模拟器,其特征在于:所述的平行光管(6)采用小畸变,平像场,复消色差的成像器件,其光学系统表面镀了高质量的增透膜,光路内做了强的防杂光处理,同时平行光管(6)的内侧面涂黑且植绒毛增强吸收杂散光的能力;平行光管的光轴垂直液晶显示板的显示面,且过其显示面中心。
说明书
技术领域技术领域
本发明涉及一种高精度低成本星光模拟器,适用于天文导航系统的理论方法和工程应用技术研究以及星敏感器的性能验证。
技术背景背景技术
随着自主天文导航技术的日趋成熟,测姿精度高的星敏感器倍受青睐,它可敏感天球上不同位置的恒星星图,通过星图识别算法识别敏感星图中的恒星,并利用恒星位置来确定飞行器的姿态。但对星敏感器的性能测试和星图识别算法的软件测试,由于航天实验费用大,往往不可能进行实时星空拍摄,因此为检验星图识别算法和星敏感器性能,通常采用星光模拟器,通过计算机仿真模拟技术在地面上模拟星空。目前,国内外在星光模拟器的研制方面,主要集中在星光模拟器的精度、速度和成本上。国外在此方面较为成熟,一般主要利用基于星光角距的导航星选取方法,通过价格昂贵的高精度、高分辨率的液晶光阀以及计算机软硬件技术来实现高精度的星光模拟,但由于采用星光角距选星及液晶光阀模拟,存在星光模拟速度慢、价格高的缺点。国内,目前已有多家单位在研制方面起步较早,但同国外仍有差距;它们大都从国外引进昂贵的液晶光阀,完成星光模拟,也有些单位直接利用笔记本模拟星图。总之,目前国内外还没有在性能和价格上比较完备的星光模拟器,本发明针对此提出了一种快速的高精度、低成本的星光模拟器。
发明内容发明内容
本发明的技术解决问题是:克服现有星光模拟器在星光模拟的精度、速度和成本等方面的不足,构建一种精度高、速度快、成本低的星光模拟器。
本发明的技术解决方案是:一种高精度低成本星光模拟器,由星图模拟计算机、分频器、显示设备、光源系统、液晶显示系统、平行光管组成,其中光源系统主要由凹透镜和面光源组成,星图模拟计算机装有星图模拟算法和基本星表;星图模拟计算机采用星图模拟算法从基本星表中检索出特定视轴和视场下的所有导航星,根据坐标转换原理,计算每颗导航星在液晶显示系统的映射位置,再通过分频器一部分输出到显示设备进行直观显示,另一部分在光源系统的面光源作用下,以一定星体大小和灰度等级在液晶显示系统中显示恒星的分布情况,将液晶显示系统的显示板置于平行光管的焦平面上,这样即可真实地模拟在特定视场和视轴下无穷远处的平行星光。
星图模拟计算机装入的星图模拟算法包括快速导航星选取算法、坐标转换模块和显示模块,它具有静态星图模拟和动态星图模拟功能;静态模拟功能可设定模拟天区中心的赤经、赤纬值,并且可将光轴设置成抖动方式,光轴抖动的范围根据飞行器横滚角度的情况设置;动态模拟功能需要导入飞行器运行的轨迹数据,可设置星图模拟速度、星图模拟器的视场范围、星灰度值、星体大小、视场旋转角、基本星表中检索导航星的星等值等。
快速导航星选取算法采用几何和投影原理,根据当前视轴的赤纬值,结合视场的大小,利用截面圆和固定区域求解赤经跨度的方法确定选取导航星条件,从而完成从基本星表中快速选取导航星。利用截面圆和固定区域求解赤经跨度方法的具体实现步骤为:设平行光管(6)视场为FOVx×FOVy,通过其看到天球上的区域S的宽为W,高为H,当前视轴指向为(αh,δ0),赤纬等于δ0的赤纬圈称为截面圆,截面圆的半径r=Rsin(90°-δ0),其中R为天球的半径,实际计算时记为单位长度,截面圆的周长L=2Pi×r=2Pi×Rcos(δ0)。则区域S所覆盖截面圆的弧长即在此赤纬下的赤经跨度Rg为:
基本星表可采用Tycho2基本星表、J2000基本星表或者SAO基本星表;为提高检索速度,其中基本星表的恒星星等亮于七等星,这些恒星的位置信息经过精确的修正达到0.1角秒(3σ)精度。
液晶显示系统由低成本、高分辨率的液晶显示板和相应的驱动电路组成,液晶显示板安装在平行光管的焦平面上,做一定程度的离焦处理,实现有效的星光模拟显示,驱动电路的核心部件采用FPGA,利用FPGA执行效率高、驱动液晶显示板简单方便,存取显示数据速度快等特点,在显示板上实现高效的恒星空间分布;液晶显示板的显示面同光源系统的面光源的面相平行,同平行光管(6)的光轴相垂直;平行光管(6)采用小畸变,平像场,复消色差的成像器件;其光学系统表面镀了高质量的增透膜,光路内做了强的防杂光处理,同时平行光管(6)的内侧面涂黑且植绒毛增强吸收杂散光的能力,避免了平行光经平行光管(6)内侧面反射产生杂光;平行光管(6)的光轴垂直液晶显示板的显示面,且过其显示面中心。
本发明的原理是:利用星图模拟计算机(1)中的星图模拟算法,从基本星表中检索出特定视轴和视场下的所有导航星,根据坐标转换原理,计算每颗导航星在液晶显示系统的映射位置;通过分频器一部分输出到显示设备直观显示,另一部分在光源系统的面光源作用下,以一定星体大小和灰度等级在液晶显示系统中显示恒星的分布情况,将液晶显示系统的显示板置于平行光管的焦平面上,这样即可真实地模拟在特定视场和视轴下无穷远处的平行星光。
本发明与现有技术相比的优点在于:保留了传统星光模拟器简单,易于参数设置、优化和工程实现的优点,同时又克服了传统星光模拟器模拟精度较低、速度慢和成本高的缺点,构建了一种精度高、成本低和模拟速度快的星光模拟器,它具有以下的优点:(1)星图模拟计算机中的高精度星图模拟算法具有静态星图的高精度模拟和动态星图的高精度模拟功能;(2)快速导航星选取算法采用几何和投影原理,利用截面圆和固定区域求解赤经跨度的方法确定选取导航星条件,而不用星光角距信息,这可大大提高星光模拟的速度;(3)液晶显示系统由低成本、高分辨率的液晶显示板和相应的驱动电路组成,液晶显示板安装在平行光管的焦平面上,做一定程度的离焦处理,实现有效的高精度星光模拟显示,同时大大降低了成本;(4)平行光管采用小畸变,平像场,复消色差的成像器件;其光学系统表面镀了高质量的增透膜,光路内做了强的防杂光处理,同时平行光管的内侧面涂黑且植绒毛增强吸收杂散光的能力,避免了平行光经平行光管内侧面反射产生杂光;平行光管的光轴垂直液晶显示板的显示面,且过其显示面中心。
附图说明附图说明
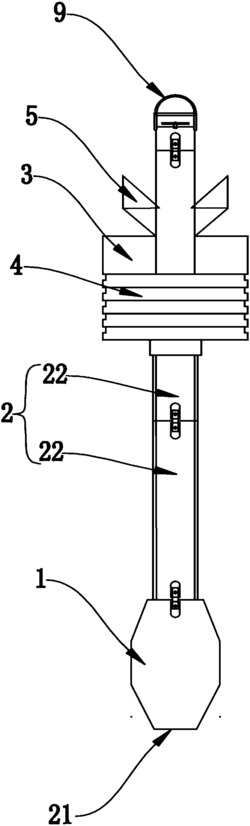
图1为本发明的的结构框架图;
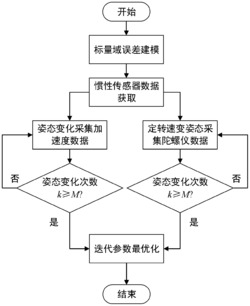
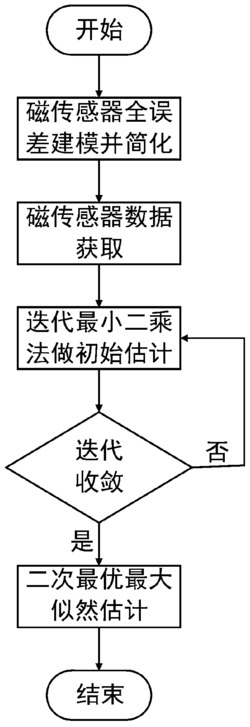
图2为本发明中的星图模拟算法流程图;
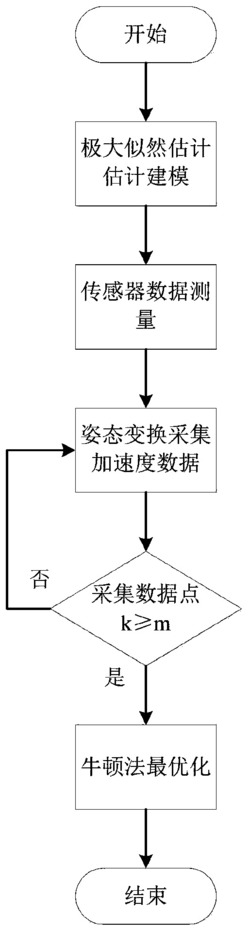
图3为本发明中的一种利用截面圆和固定区域求解赤经跨度进行导航星选取的流程图;
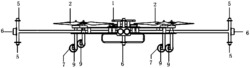
图4为本发明中的一种平行光管产生平行光原理图;
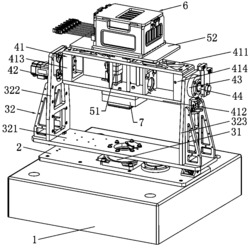
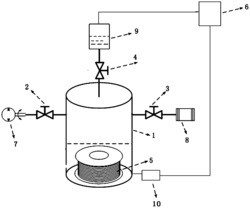
图5为本发明中的光源系统、液晶显示板和平行光管的安装图。
具体实施方式具体实施方式
如图1所示,本发明包括星图模拟计算机1、分频器2、显示设备3、光源系统4、液晶显示系统5、平行光管6,其中光源系统4由凹透镜和面光源组成;星图模拟计算机1装有星图模拟算法11和基本星表12;星图模拟计算机1,采用星图模拟算法11,从基本星表12中检索出特定视轴和视场下的所有导航星,根据坐标转换原理,计算每颗导航星在液晶显示系统5的映射位置;通过分频器2,一部分输出到显示设备3直观显示,另一部分在光源系统4的面光源作用下,以一定星体大小和灰度等级在液晶显示系统5中显示恒星的分布情况;将液晶显示系统5的显示板置于平行光管6的焦平面上,这样即可真实地模拟在特定视场和视轴下无穷远处的平行星光。
如图2所示,本发明的星图模拟算法11流程为:算法初始化后进行飞行器运行周期设置,判断是否进行动态模拟,如是则直接进行快速导航星选取,否则进行视场大小设置;设定液晶显示系统5的旋转角,并输入天区中心的赤经和赤纬,后进行快速导航星选取,结合基本星表12完成检索结果的输出;将输出的信息根据坐标变换原理,求解出每颗导航星在显示平面上的映射位置,星体显示属性可进行有效性设置;之后判断是否完成模拟,如完成则算法结束,否则返回到飞行器运行周期设置,进行下一循环的模拟。
如图3所示,本发明中的导航星快速选取算法采用几何和投影原理,根据当前视轴的赤纬值,结合视场的大小,利用截面圆和固定区域求解赤经跨度的方法确定选取导航星条件,从而完成从基本星表12中快速选取导航星。具体实现为:设平行光管6的视场为FOVx×FOVy,通过其看到天球上的区域S的宽为W,高为H,当前视轴指向为(αh,δ0),赤纬等于δ0的赤纬圈称为截面圆,截面圆的半径r=Rsin(90°-δ0),其中R为天球的半径,实际计算时记为单位长度,截面圆的周长L=2Pi×r=2Pi×Rcos(δ0)。则区域S所覆盖截面圆的弧长即在此赤纬下的赤经跨度Rg为:
赤经跨度求解出来后,即可进行导航星的选取:设光轴方向为(α0,δ0),根据赤纬δ0通过上述方法确定的赤经跨度为Rg,则观测星的选取方法如下:假设某一颗恒星的赤经、赤纬值为(α,δ),则只要α,δ值满足以下条件,就可将其选为观测星。
根据上面公式即可完成导航星的快速选取。
如图4所示,本发明的液晶显示系统5由低成本、高分辨率的液晶显示板和相应的驱动板组成,液晶显示板安装在平行光管6的焦平面上,做一定程度的离焦处理,实现有效的星光模拟显示,驱动电路的核心部件采用FPGA,利用FPGA执行效率高、驱动液晶显示板简单方便,存取显示数据速度快等特点,在显示板上实现高效的恒星空间分布;液晶显示板的显示面同光源系统5的面光源的面相平行,同平行光管6的光轴相垂直。根据光学原理,将模拟星图的液晶显示板放置在镜头的焦平面61上,光源上的每一个光点(如A点)将通过透镜产生一组平行光62,而且该组平行光的方向均平行于通过该光点和镜头中心的光线63。
平行光管6采用小畸变,平像场,复消色差的成像器件,其光学系统表面64镀了高质量的增透膜,光路内做了强的防杂光处理,同时平行光管的内侧面65涂黑且植绒毛增强吸收杂散光的能力避免了平行光经平行光管6内侧面反射产生杂光。
如图5所示,本发明的光源系统4、液晶显示板和平行光管6的安装,要求光源系统4面光源的面同液晶显示板的显示面相平行,平行光管6的光轴垂直这两个面,且过这两个面的中心;本发明为了使液晶显示板受光均匀,在面光源的前端安装一个凹透镜,将面光源安置在凹透镜的焦平面上,B为凹透镜的焦点;凹透镜的高度h同液晶显示板上的有效显示面相一致,距离d根据星光模拟时所要求的模拟最暗恒星的能量确定。
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的
现有技术。
一种高精度低成本星光模拟器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0