










专利摘要
一种基于视线的有限时间收敛主动防御制导控制方法,涉及一种制导控制方法,特别是涉及一种主动防御制导控制方法。为了解决防御导弹过载能力受限的问题。本发明首先对目标、防御导弹和拦截导弹相对运动建模,采用视线制导方式为防御导弹设计制导律,然后采用非奇异终端滑模控制来设计制导律,对纵向平面和侧向平面分别定义滑模变量为并对其求导,将目标、防御导弹和拦截导弹相对运动方程带入并整理后得到纵向平面和侧向平面的制导律和,并按制导律对导弹进行控制,本发明能有效降低防御导弹需用过载。本发明适用于主动防御制导控制。
权利要求
1.一种基于视线的有限时间收敛主动防御制导控制方法,其特征在于包括下述步骤:
步骤1:拦截导弹-目标和防御导弹-拦截导弹相对运动建模:
目标、防御导弹和拦截导弹的速度用Vt,Vd和Vm表示;假设拦截导弹和防御导弹的控制均可解耦为纵向平面和侧向平面独立制导;
拦截导弹和目标的相对运动方程建模为:
其中,Rmt为拦截导弹和目标的距离, 为Rmt的一阶导数;qεmt和qβmt分别为拦截导弹-目标的视线高低角和方位角,相应的视线角速度为 和 和 分别为拦截导弹-目标的视线高低角和方位角的二阶导数; 和 分别为目标加速度在拦截导弹-目标视线坐标系下垂直视线的分量; 和 分别为拦截导弹加速度在拦截导弹-目标视线坐标系下垂直视线的分量;
防御导弹和拦截导弹相对运动建模为:
其中,Rdm为防御导弹和拦截导弹的距离, 为Rdm的一阶导数;式中qεdm和qβdm分别为防御导弹-拦截导弹的视线高低角和方位角,相应视线角速度为 和 和 分别为防御导弹-拦截导弹的视线高低角和方位角的二阶导数; 和 分别为防御导弹加速度在防御导弹-拦截导弹视线坐标系下垂直视线的分量; 和 分别为拦截导弹加速度在防御导弹-拦截导弹视线坐标系下垂直视线的分量;
步骤2:视线制导方式建模:
采用视线制导方式为防御导弹设计制导律;视线制导满足如下等式
qεdm=-qεmt,qβdm=qβmt (5)
定义防御导弹对拦截导弹的视线角和视线角速度误差为:
其中
步骤3:定义滑模变量:
采用非奇异终端滑模控制来设计制导律;对纵向平面和侧向平面分别定义滑模变量为σ1和σ2,表达式如下
其中,α1,α2是两个常数,α1和α2均为两个正奇数的商且满足1<α1<2,1<α2<2;β1,β2是两个常数,β1>0,β2>0;
对公式(9)和(10)求导得到滑模变量的时间导数为
将相对运动方程(1),(2),(3)和(4)代入式(11)和(12)整理得
其中
步骤4:设计制导律并按制导律对导弹进行控制:
和 是有限的值,设 和 M1、M2为常数;M1、M2大于零,小于等于拦截导弹最大过载能力;假定目标的机动可以忽略不计;
纵向平面和侧向平面的制导律分别设计如下
其中切换项增益ρ1>M1,ρ2>M2;sign(·)是符号函数;
按制导律(15)(16)对导弹进行控制。
2.根据权利要求1所述的一种基于视线的有限时间收敛主动防御制导控制方法,其特征在于,步骤3中的
3.根据权利要求1或2所述的一种基于视线的有限时间收敛主动防御制导控制方法,其特征在于,步骤3中的β1=β2=40。
4.根据权利要求3所述的一种基于视线的有限时间收敛主动防御制导控制方法,其特征在于,步骤4中0<M1<100、0<M2<100。
说明书
技术领域
本发明涉及一种制导控制方法,特别是涉及一种主动防御制导控制方法。
背景技术
随着导弹防御系统技术的完善,弹道导弹突防面临巨大挑战。弹道导弹在大气层外的中段飞行段由于机动能力很小,弹道固定容易被导弹防御系统拦截。为了避免被导弹防御系统拦截,传统突防的弹道导弹采用了被动逃避的方式,例如电子干扰,隐身技术,释放诱饵,中段制导,多弹头攻击和机动变轨等多种方式。与此相对的是采用主动防御方法,即弹道导弹释放防御导弹,之后防御导弹与其伴飞,拦截导弹防御系统发射的拦截导弹。主动防御方法也可以结合以上提到的被动防御方法,进一步提高弹道导弹的突防概率。为了叙述简便,将突防的弹道导弹称为目标,伴飞的防御导弹称为防御导弹,导弹防御系统发射的拦截目标的导弹称为拦截导弹。整个制导场景分为拦截导弹拦截目标和防御导弹拦截拦截导弹。在导弹末制导技术中,应用最广的是基于零化视线角速率的PN制导律。但是使用PN制导律的防御导弹要成功拦截机动目标需要很大的过载能力。花文化等人在《飞行力学》,2012年第1期“主动防御协同自适应滑模制导律”提出了一种飞机防御的制导律。采用了传统滑模控制方法。飞机防御问题属于大气层内制导问题,防御导弹需用过载大,这和大气层外防御导弹机动过载能力较小不同,作者并未验证其制导律是否能直接应用到大气层外的弹道导弹防御场景中。针对以上方法存在的问题,需要设计一种能降低防御导弹需用过载的鲁棒的制导律。
发明内容
本发明为了解决防御导弹过载能力受限的问题,进而提出了一种基于视线的有限时间收敛主动防御制导控制方法。
一种基于视线的有限时间收敛主动防御制导控制方法,包括下述步骤:
步骤1:拦截导弹-目标和防御导弹-拦截导弹相对运动建模:
目标、防御导弹和拦截导弹的速度用Vt,Vd和Vm表示;假设拦截导弹和防御导弹的控制均可解耦为纵向平面和侧向平面独立制导;
拦截导弹和目标的相对运动方程建模为:
其中,Rmt为拦截导弹和目标的距离, 为Rmt的一阶导数;qεmt和qβmt分别为拦截导弹-目标的视线高低角和方位角,相应的视线角速度为 和 和 分别为拦截导弹-目标的视线高低角和方位角的二阶导数; 和 分别为目标加速度在拦截导弹-目标视线坐标系下垂直视线的分量; 和 分别为拦截导弹加速度在拦截导弹-目标视线坐标系下垂直视线的分量;
防御导弹和拦截导弹相对运动建模为:
其中,Rdm为防御导弹和拦截导弹的距离, 为Rdm的一阶导数;式中qεdm和qβdm分别为防御导弹-拦截导弹的视线高低角和方位角,相应视线角速度为 和 和 分别为防御导弹-拦截导弹的视线高低角和方位角的二阶导数; 和 分别为防御导弹加速度在防御导弹-拦截导弹视线坐标系下垂直视线的分量; 和 分别为拦截导弹加速度在防御导弹-拦截导弹视线坐标系下垂直视线的分量;
步骤2:视线制导方式建模:
采用视线制导方式为防御导弹设计制导律;在视线制导方式下,防御导弹通过控制将自身的位置置于拦截导弹和目标的视线上;随着拦截导弹不断接近目标,最终将撞上防御导弹;视线制导满足如下等式
qεdm=-qεmt,qβdm=qβmt (5)
在制导过程中,防御导弹-拦截导弹的视线角和视线角速度并不能精确满足公式(5)和(6),定义防御导弹对拦截导弹的视线角和视线角速度误差为:
其中
步骤3:定义滑模变量:
采用非奇异终端滑模控制来设计制导律;对纵向平面和侧向平面分别定义滑模变量为σ1和σ2,表达式如下
其中,α1,α2是两个常数,α1和α2均为两个正奇数的商且满足1<α1<2,1<α2<2;β1,β2是两个常数,β1>0,β2>0;根据非奇异终端滑模控制方法的特点,后续设计的制导律可以保证状态xε1和xβ1在有限时间内收敛到0;
对公式(9)和(10)求导得到滑模变量的时间导数为
将相对运动方程(1),(2),(3)和(4)代入式(11)和(12)整理得
其中
步骤4:设计制导律并按制导律对导弹进行控制:
和 是有限的值,设 和 M1、M2为常数,具体值和拦截导弹的过载能力有关,M1、M2大于零,小于等于拦截导弹最大过载能力;假定目标的机动可以忽略不计;
纵向平面和侧向平面的制导律分别设计如下
其中切换项增益ρ1>M1,ρ2>M2;sign(·)是符号函数;
按制导律(15)(16)对导弹进行控制。
本发明使用了基于视线的制导方式并采用了非奇异终端滑模控制理论,能有效降低防御导弹需用过载。PN制导律的平均脱靶量为0.24米时,过载能力为5g;而本发明制导律的平均脱靶量为0.2米时,过载能力2.5g。
附图说明
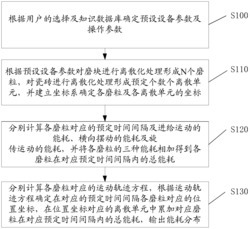
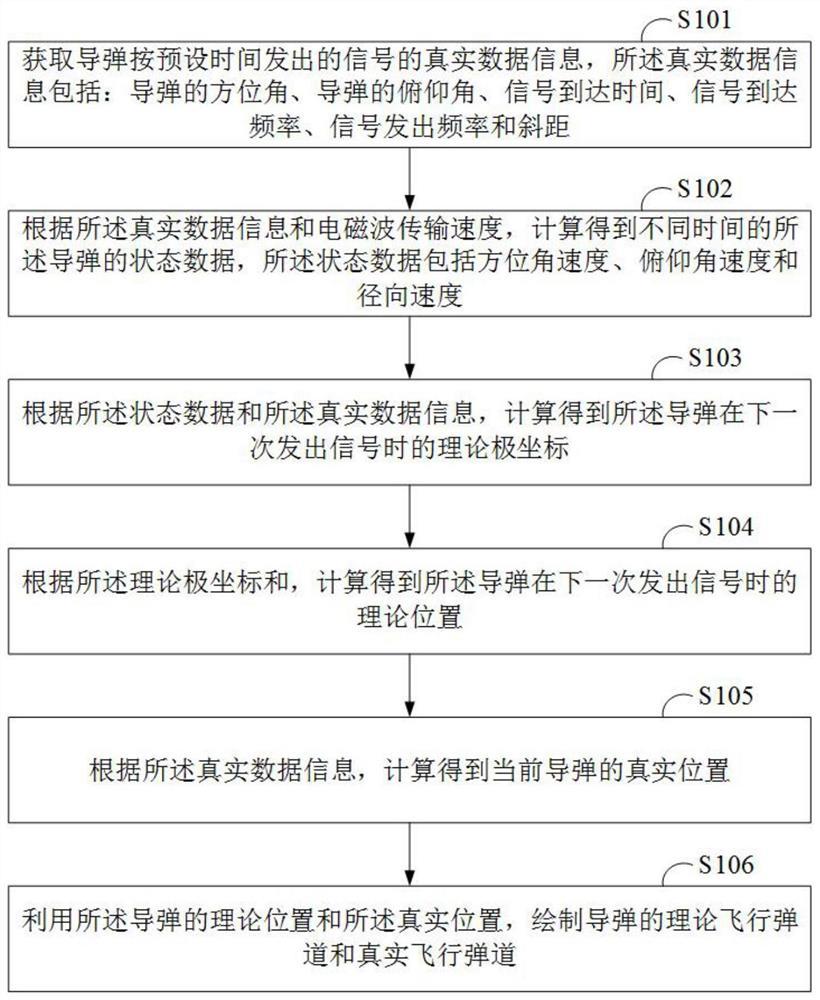
图1基于视线的有限时间收敛主动防御制导控制方法流程图;
图2目标、防御导弹和拦截导弹三者相对运动示意图;
图3目标、拦截导弹和防御导弹弹道轨迹;
图4防御导弹对拦截导弹的视线角速率;
图5目标、拦截导弹和防御导弹三点共线情况图。
具体实施方式
具体实施方式一:结合图1说明本实
一种基于视线的有限时间收敛主动防御制导控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0