

IPC分类号 : G01N23/046,G01N21/84,G01N21/01,G01D21/02,G01B15/00,G01B11/28,G01B11/02







专利摘要
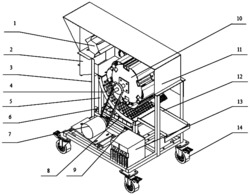
本发明涉及一种适用于农业科研工作者在水稻栽培和遗传育种研究中能够同时获取水稻植株和水稻根系的三维形态参数无损测量的装置及方法。本发明所述的CT检测装置主要由射线源、平板探测器、载物旋转台、升降模组、滚筒输送线、精密运动控制器及计算机系统7个功能模块组成;本发明采用滚筒输送线将待测样本从种植区域输送移动到检测区域,通过精密运动控制器实现盆栽作物的自动定位旋转以及射线源平板探测器的自动升降,以获取不同角度、高度下的地上植株可见光图像和地下根系的X射线断层图像,然后通过运动恢复算法SFM、锥形束FDK算法得到水稻植株和根系的三维重建数据,再通过融合算法得到水稻整株的三维模型数据,并进行性状分析。
权利要求
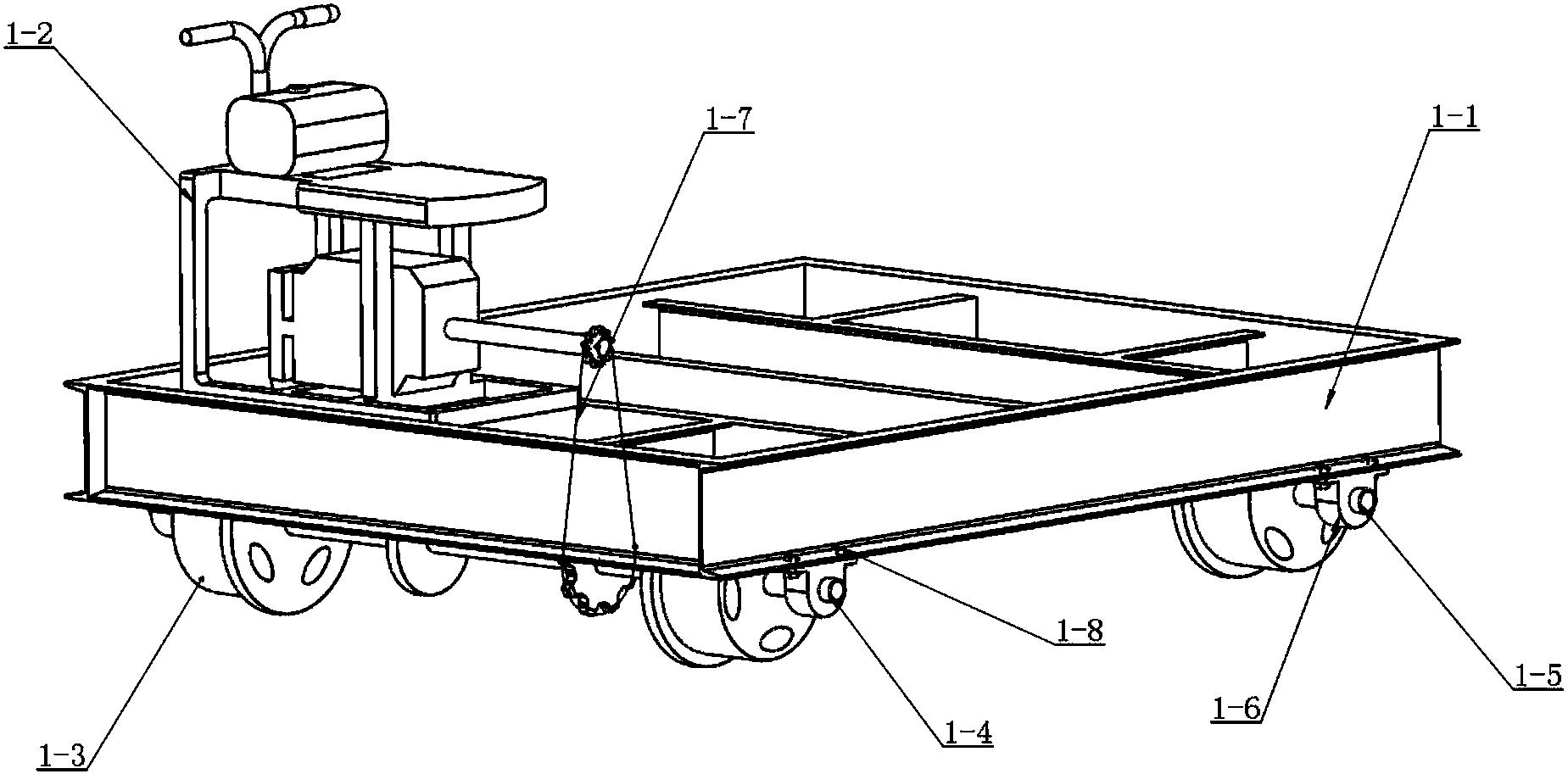
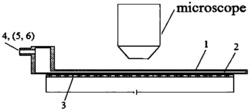
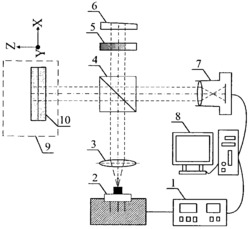
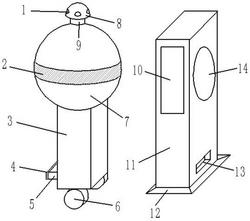
1.一种水稻植株及根系三维性状无损测量装置,其特征在于:包括第一升降模组(8)、第二升降模组(9)、载物旋转台(5)、平移模组(6)、CT射线源(3)、平板探测器(4)、可见光传感器(11)、滚筒输送线(7)、精密运动控制器(2)以及计算机系统(1);第一升降模组(8)、第二升降模组(9)、载物旋转台(5)、平移模组(6)均采用伺服电机驱动,每个运动机构之间既可以独立定位运动也可以联动;可见光传感器(11)用于获取水稻植株不同角度下的2D平面图像;CT射线源(3)用于提供稳定的X射线束,平板探测器(4)用于采集CT断层平面阵列图像;滚筒输送线(7)用于将水稻盆栽(10)输送到指定的检测位置;精密运动控制器(2)用于对第一升降模组(8)、第二升降模组(9)、载物旋转台(5)、平移模组(6)进行驱动控制,通过精密运动控制器(2)实现CT射线源(3)和平板探测器(4)的同步上升和下降;计算机系统(1)实现CT图像自动采集、可见光图像自动采集、可见光图像SFM3D重建、CT图像自动重建、植株整株三维建模和修正、植株表型性状提取、根系表型性状提取、图像及数据存储管理、下位机自动通讯控制以及整个系统的信息全自动接收及处理;
其中,计算机系统(1)内置了测量系统,测量系统具体包括:
硬件控制模块,用于实现计算机系统(1)与精密运动控制器(2)的通信;通过计算机系统(1)发送控制指令给精密运动控制器(2),进而控制滚筒输送线(7)进行盆栽水稻输送功能;同时通过精密运动控制器(2)驱动第一升降模组(8)、第二升降模组(9)及载物旋转台(5),精准控制水稻盆栽的角度旋转和高度升降;
图像采集模块,每当水稻盆栽(10)旋转一个角度并升降一个高度后,通过平板探测器(4)采集水稻盆栽(10)的根系断层图像,以此来控制CT射线源(3)、平板探测器(4)与载物旋转台(5)、第一升降模组(8)、第二升降模组(9)的有序协调运行;
图像处理模块,用于对采集到的水稻根系断层图像通过FDK算法进行图像重建,并对重建后的图像进行图像处理;还用于对可见光传感器(11)获取到的不同角度下水稻盆栽(10 )的2D图像,通过运动恢复结构算法SFM进行三维重建,然后对重建后的水稻植株图像进行三维点云分析;还用于将通过FDK算法获取得到的水稻根系三维数据模型与通过运动恢复结构算法SFM获取得到的水稻植株三维数据模型进行融合,获得水稻整株的三维模型,并对整株的三维模型进行可视化分析,通过标准样品进行效果测试和修正,计算株型参数和根系性状参数,对结果进行输出显示。
2.根据权利要求1所述的水稻植株及根系三维性状无损测量装置,其特征在于:
CT射线源(3)与第二升降模组(9)连接在一起,平板探测器(4)与第一升降模组(8)连接在一起,通过精密运动控制器(2)实现CT射线源(3)和平板探测器(4)的同步上升和下降。
3.根据权利要求1所述的水稻植株及根系三维性状无损测量装置,其特征在于:
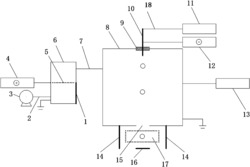
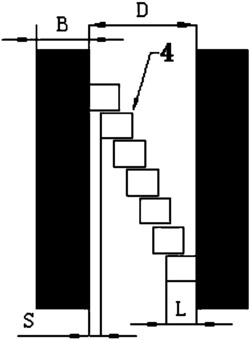
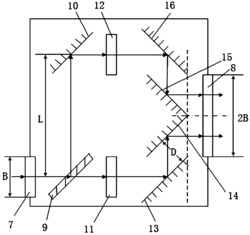
滚筒输送线(7)用于实现水稻盆栽(10)在种植区域(13)与载物旋转台(5)之间的输送;滚筒输送线(7)包含不锈钢滚筒(15),实现水稻盆栽(10)的传动;不锈钢滚筒(15)采用包胶结构,用于增大摩擦力,为水稻盆栽(10)的传动提供稳定的动力;滚筒输送线(7)还包含定位传感器(14),采用金属接近式开关,感应水稻盆栽(10)底托的底部边缘,实现水稻盆栽(10)的定位;滚筒输送线(7)还包含动力电机(16)。
4.一种水稻植株及根系三维性状无损测量方法,采用如权利要求1-3中任意一项所述的水稻植株及根系三维性状无损测量装置,其特征在于,测量方法包括以下步骤:
步骤1,通过滚筒输送线(7)将水稻盆栽(10)输送到载物旋转台(5)上;
步骤2,通过精密运动控制器(2)使CT射线源(3)和平板探测器(4)等高度上升和下降以及载物旋转台等角度旋转;
步骤3,可见光传感器(11)在载物旋转台(5)等角度旋转暂停时,采集水稻盆栽(10)的不同角度下2D图像并传送给计算机系统(1);
步骤4,平板探测器(4)在升降模组(8)、第二升降模组(9)等高度上升和载物旋转台(5)等角度旋转停止时,采集水稻盆栽(10)的根系断层图像并传输给计算机系统(1);
步骤5,待一株水稻盆栽(10)在所有角度和高度条件下采集完成后,由计算机系统(1)的测量系统融合处理得到水稻整株三维模型,并对三维模型进行可视化分析,通过标准样品进行效果测试和修正,计算水稻盆栽(10)的植株性状及根系三维性状,存储并显示结果;
步骤6,滚筒输送线(7)将水稻盆栽(10)输送到种植区域。
5.根据权利要求4所述的水稻植株及根系三维性状无损测量方法,其特征在于:所述步骤5中,计算水稻盆栽(10)的植株性状及根系三维性状,具体采用如下步骤:
步骤51,用标准样品对CT系统以及可见光传感器的各项性能指标进行测试,同时标定好系统重建的各项参数;
步骤52,在各项性能指标参数标定完成的基础之上,采集各个角度下单盆水稻盆栽植株的2D图像,首先通过深度学习对可见光图像进行分割,去除背景后提取水稻植株的可见光图片,接着基于运动恢复结构算法SFM实现水稻植株三维点云重建;
步骤53,在各项性能指标参数标定的基础之上,采集各个角度和高度下单盆水稻盆栽根系投影图片,基于CT重建FDK算法来获取水稻根系三维重建图像;
步骤54,在获得的水稻植株和根系的三维重建数据基础之上,分别获取水稻植株及根系的三维模型结构,再基于三维模型融合算法构建出水稻植株地上地下整株三维数据模型;
步骤55,将构建得到的水稻植株整株三维模型通过标准样品进行效果测试和修正,然后进行株型参数和根系性状参数的测量与计算;株型参数包括:植株株高、叶片角度、植株紧凑度、叶片数、叶面积、生物量和稻穗生物量;根系性状参数包括:最大根长、最大根宽、最小根宽、根长宽比、根表面积、根体积、外接凸包体积、平均根数、最大根数、根面积/体积比和根体积/凸包体积比;
步骤56,输出显示水稻整株三维模型,以及获得的株型参数和根系性状参数。
6.根据权利要求5所述的水稻植株及根系三维性状无损测量方法,其特征在于:步骤51中,CT系统以及可见光传感器的各项性能指标,具体包括可见光图像传感器成像角度、分辨率大小、俯仰角大小、物距和旋转台单次旋转角度、CT系统空间放大倍率确定、视场FOV、系统空间分辨率、系统均一性测试、系统密度分辨率测试、射线源发散角、射线源电压大小、射线源电流大小、投影旋转角度,中心点位置以及物体到射线源的距离。
说明书
技术领域
本发明属于机器视觉检测技术和数字化农业领域,具体涉及一种水稻植株及根系三维性状无损测量装置及方法。
背景技术
水稻根系在水稻植株生长中具有非常重要的作用。水稻根系不仅是水稻植株吸收水分和营养的器官,而且是多种激素和氨基酸的合成场所。水稻根系通过分泌植物激素、有机酸等物质影响着植株土壤微生物的生态环境。根系的相关性状和产量有着密切的联系,根系的结构能够影响整个植株对土壤中营养资源的有效利用。根系的结构在很大程度上间接影响了水稻的产量,因此研究水稻根系表型具有非常重要的理论和实践意义。
传统的水稻根系研究大多都是依靠人工,将水稻根系从土壤中挖出洗净之后进行测量,获取根系的长度、直径以及相关生物量等一些性状参数,这种传统的方法非常耗费劳动力,人工成本太高,而且效率低下,对水稻根系也有损伤,数据量大时人工测量会因为测量人员的主观意识导致测量误差偏大,另外人工测量难以对全生育期的水稻根系进行动态测量。
发明内容
本发明的目的是为了克服上述不足,提供一种水稻植株及根系三维性状无损测量装置及方法。本发明的技术方案如下:
一种水稻植株及根系三维性状无损测量装置,其特征在于:包括第一升降模组8、第二升降模组9、载物旋转台5、平移模组6、CT射线源3、平板探测器4、可见光传感器11、滚筒输送线7、精密运动控制器2以及计算机系统1;第一升降模组8、第二升降模组9、载物旋转台5、平移模组6均采用伺服电机驱动,每个运动机构之间既可以独立定位运动也可以联动;可见光传感器11用于获取水稻植株不同角度下的2D平面图像;CT射线源3用于提供稳定的X射线束,平板探测器4用于采集CT断层平面阵列图像;滚筒输送线7用于将水稻盆栽10输送到指定的检测位置;精密运动控制器2用于对第一升降模组8、第二升降模组9、载物旋转台5、平移模组6进行驱动控制,计算机系统1实现CT图像自动采集、可见光图像自动采集、可见光图像SFM3D重建、CT图像自动重建、植株整株三维建模和修正、植株表型性状提取、根系表型性状提取、图像及数据存储管理、下位机自动通讯控制以及整个系统的信息全自动接收及处理。
具体地,计算机系统1内置了测量系统,测量系统具体包括:
硬件控制模块,用于实现计算机系统1与精密运动控制器2的通信;通过计算机系统1发送控制指令给精密运动控制器2,进而控制滚筒输送线7进行盆栽水稻输送功能;同时通过精密运动控制器2驱动第一升降模组8、第二升降模组9及载物旋转台5,精准控制水稻盆栽的角度旋转和高度升降;
图像采集模块,每当水稻盆栽10旋转一个角度并升降一个高度后,通过平板探测器4采集水稻盆栽10的根系断层图像,以此来控制CT射线源3、平板探测器4与载物旋转台5、第一升降模组8、第二升降模组9的有序协调运行;
图像处理模块,用于对采集到的水稻根系断层图像通过FDK算法进行图像重建,并对重建后的图像进行图像处理;还用于对可见光传感器11获取到的不同角度下水稻盆栽11的2D图像,通过运动恢复结构算法SFM进行三维重建,然后对重建后的水稻植株图像进行三维点云分析;还用于将通过FDK算法获取得到的水稻根系三维数据模型与通过运动恢复结构算法SFM获取得到的水稻植株三维数据模型进行融合,获得水稻整株的三维模型,并对整株的三维模型进行可视化分析,通过标准样品进行效果测试和修正,计算株型参数和根系性状参数,对结果进行输出显示。
具体地,CT射线源3与第二升降模组9连接在一起,平板探测器4与第一升降模组8连接在一起,通过精密运动控制器2实现CT射线源3和平板探测器4的同步上升和下降。
具体地,滚筒输送线7用于实现水稻盆栽10在种植区域13与载物旋转台5之间的输送;滚筒输送线7包含不锈钢滚筒15,实现水稻盆栽10的传动;不锈钢滚筒15采用包胶结构,用于增大摩擦力,为水稻盆栽10的传动提供稳定的动力;滚筒输送线7还包含定位传感器14,采用金属接近式开关,感应水稻盆栽10底托的底部边缘,实现水稻盆栽10的定位;滚筒输送线7还包含动力电机16。
一种水稻植株及根系三维性状无损测量方法,采用前述的水稻植株及根系三维性状无损测量装置,其特征在于,测量方法包括以下步骤:
步骤1,通过滚筒输送线7将水稻盆栽10输送到载物旋转台5上;
步骤2,通过精密运动控制器2使CT射线源3和平板探测器4等高度上升和下降以及载物旋转台等角度旋转;
步骤3,可见光传感器11在载物旋转台5等角度旋转暂停时,采集水稻盆栽10的不同角度下2D图像并传送给计算机系统1;
步骤4,平板探测器4在升降模组8、第二升降模组9等高度上升和载物旋转台5等角度旋转停止时,采集水稻盆栽10的根系断层图像并传输给计算机系统1;
步骤5,待一株水稻盆栽10在所有角度和高度条件下采集完成后,由计算机系统1的测量系统融合处理得到水稻整株三维模型,并对三维模型进行可视化分析,通过标准样品进行效果测试和修正,计算水稻盆栽10的植株性状及根系三维性状,存储并显示结果;
步骤6,滚筒输送线7将水稻盆栽10输送到种植区域。
具体地,所述步骤5中,计算水稻盆栽10的植株性状及根系三维性状,具体采用如下步骤:
步骤51,用标准样品对CT系统以及可见光传感器的各项性能指标进行测试,同时标定好系统重建的各项参数;
步骤52,在各项性能指标参数标定完成的基础之上,采集各个角度下单盆水稻盆栽植株的2D图像,首先通过深度学习对可见光图像进行分割,去除背景后提取水稻植株的可见光图片,接着基于运动恢复结构算法SFM实现水稻植株三维点云重建;
步骤53,在各项性能指标参数标定的基础之上,采集各个角度和高度下单盆水稻盆栽根系投影图片,基于CT重建FDK算法来获取水稻根系三维重建图像;
步骤54,在获得的水稻植株和根系的三维重建数据基础之上,分别获取水稻植株及根系的三维模型结构,再基于三维模型融合算法构建出水稻植株地上地下整株三维数据模型;
步骤55,将构建得到的水稻植株整株三维模型通过标准样品进行效果测试和修正,然后进行株型参数和根系性状参数的测量与计算;株型参数包括:植株株高、叶片角度、植株紧凑度、叶片数、叶面积、生物量和稻穗生物量;根系性状参数包括:最大根长、最大根宽、最小根宽、根长宽比、根表面积、根体积、外接凸包体积、平均根数、最大根数、根面积/体积比和根体积/凸包体积比等;
步骤56,输出显示水稻整株三维模型,以及获得的株型参数和根系性状参数。
具体地,步骤51中,CT系统以及可见光传感器的各项性能指标,具体包括可见光图像传感器成像角度、分辨率大小、俯仰角大小、物距和旋转台单次旋转角度、CT系统空间放大倍率确定、视场FOV、系统空间分辨率、系统均一性测试、系统密度分辨率测试、射线源发散角、射线源电压大小、射线源电流大小、投影旋转角度,中心点位置以及物体到射线源的距离。
通过以上技术方案,本发明获得了如下积极技术效果:实现了对水稻植株整株的在体无损高通量自动化测量,不仅包括地面植株部分,还包括地下根系部分,将两部分测量结果进行融合,进行修正处理,获得了精确的整株三维模型,并在此基础上测量得到了精确的植株株型参数和根系性状参数,相比于现有技术而言获得了更高的效率和精度。
附图说明
图1全自动CT水稻植株及根系三维性状无损测量装置示意图
图2不锈钢滚筒输送线结构示意图
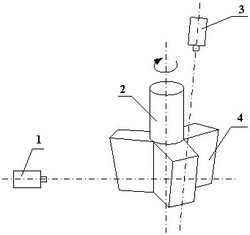
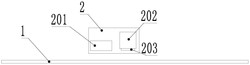
图3种植区域转向示意图
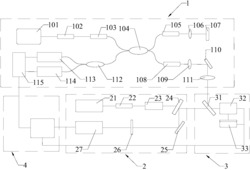
图4全自动CT无损测量技术流程图
图5水稻植株重建后的图像
图6水稻根系重建后的图像
具体实施方式
本发明的具体实施方式如下:
一种水稻植株及根系三维性状无损测量装置,其特征在于:包括第一升降模组8、第二升降模组9、载物旋转台5、平移模组6、CT射线源3、平板探测器4、可见光传感器11、滚筒输送线7、精密运动控制器2以及计算机系统1;第一升降模组8、第二升降模组9、载物旋转台5、平移模组6均采用伺服电机驱动,每个运动机构之间既可以独立定位运动也可以联动;可见光传感器11用于获取水稻植株不同角度下的2D平面图像;CT射线源3用于提供稳定的X射线束,平板探测器4用于采集CT断层平面阵列图像;滚筒输送线7用于将水稻盆栽10输送到指定的检测位置;精密运动控制器2用于对第一升降模组8、第二升降模组9、载物旋转台5、平移模组6进行驱动控制,计算机系统1实现CT图像自动采集、可见光图像自动采集、可见光图像SFM3D重建、CT图像自动重建、植株整株三维建模和修正、植株表型性状提取、根系表型性状提取、图像及数据存储管理、下位机自动通讯控制以及整个系统的信息全自动接收及处理。
具体地,计算机系统1内置了测量系统,测量系统具体包括:
硬件控制模块,用于实现计算机系统1与精密运动控制器2的通信;通过计算机系统1发送控制指令给精密运动控制器2,进而控制滚筒输送线7进行盆栽水稻输送功能;同时通过精密运动控制器2驱动第一升降模组8、第二升降模组9及载物旋转台5,精准控制水稻盆栽的角度旋转和高度升降;
图像采集模块,每当水稻盆栽10旋转一个角度并升降一个高度后,通过平板探测器4采集水稻盆栽10的根系断层图像,以此来控制CT射线源3、平板探测器4与载物旋转台5、第一升降模组8、第二升降模组9的有序协调运行;
图像处理模块,用于对采集到的水稻根系断层图像通过FDK算法进行图像重建,并对重建后的图像进行图像处理;还用于对可见光传感器11获取到的不同角度下水稻盆栽11的2D图像,通过运动恢复结构算法SFM进行三维重建,然后对重建后的水稻植株图像进行三维点云分析;还用于将通过FDK算法获取得到的水稻根系三维数据模型与通过运动恢复结构算法SFM获取得到的水稻植株三维数据模型进行融合,获得水稻整株的三维模型,并对整株的三维模型进行可视化分析,通过标准样品进行效果测试和修正,计算株型参数和根系性状参数,对结果进行输出显示。
具体地,CT射线源3与第二升降模组9连接在一起,平板探测器4与第一升降模组8连接在一起,通过精密运动控制器2实现CT射线源3和平板探测器4的同步上升和下降。
具体地,滚筒输送线7用于实现水稻盆栽10在种植区域13与载物旋转台5之间的输送;滚筒输送线7包含不锈钢滚筒15,实现水稻盆栽10的传动;不锈钢滚筒15采用包胶结构,用于增大摩擦力,为水稻盆栽10的传动提供稳定的动力;滚筒输送线7还包含定位传感器14,采用金属接近式开关,感应水稻盆栽10底托的底部边缘,实现水稻盆栽10的定位;滚筒输送线7还包含动力电机16。
一种水稻植株及根系三维性状无损测量方法,采用前述的水稻植株及根系三维性状无损测量装置,其特征在于,测量方法包括以下步骤:
步骤1,通过滚筒输送线7将水稻盆栽10输送到载物旋转台5上;
步骤2,通过精密运动控制器2使CT射线源3和平板探测器4等高度上升和下降以及载物旋转台等角度旋转;
步骤3,可见光传感器11在载物旋转台5等角度旋转暂停时,采集水稻盆栽10的不同角度下2D图像并传送给计算机系统1;
步骤4,平板探测器4在升降模组8、第二升降模组9等高度上升和载物旋转台5等角度旋转停止时,采集水稻盆栽10的根系断层图像并传输给计算机系统1;
步骤5,待一株水稻盆栽10在所有角度和高度条件下采集完成后,由计算机系统1的测量系统融合处理得到水稻整株三维模型,并对三维模型进行可视化分析,通过标准样品进行效果测试和修正,计算水稻盆栽10的植株性状及根系三维性状,存储并显示结果;
步骤6,滚筒输送线7将水稻盆栽10输送到种植区域。
具体地,所述步骤5中,计算水稻盆栽10的植株性状及根系三维性状,具体采用如下步骤:
步骤51,用标准样品对CT系统以及可见光传感器的各项性能指标进行测试,同时标定好系统重建的各项参数;
步骤52,在各项性能指标参数标定完成的基础之上,采集各个角度下单盆水稻盆栽植株的2D图像,首先通过深度学习对可见光图像进行分割,去除背景后提取水稻植株的可见光图片,接着基于运动恢复结构算法SFM实现水稻植株三维点云重建;
步骤53,在各项性能指标参数标定的基础之上,采集各个角度和高度下单盆水稻盆栽根系投影图片,基于CT重建FDK算法来获取水稻根系三维重建图像;
步骤54,在获得的水稻植株和根系的三维重建数据基础之上,分别获取水稻植株及根系的三维模型结构,再基于三维模型融合算法构建出水稻植株地上地下整株三维数据模型;
步骤55,将构建得到的水稻植株整株三维模型通过标准样品进行效果测试和修正,然后进行株型参数和根系性状参数的测量与计算;株型参数包括:植株株高、叶片角度、植株紧凑度、叶片数、叶面积、生物量和稻穗生物量;根系性状参数包括:最大根长、最大根宽、最小根宽、根长宽比、根表面积、根体积、外接凸包体积、平均根数、最大根数、根面积/体积比和根体积/凸包体积比等;
步骤56,输出显示水稻整株三维模型,以及获得的株型参数和根系性状参数。
具体地,步骤51中,CT系统以及可见光传感器的各项性能指标,具体包括可见光图像传感器成像角度、分辨率大小、俯仰角大小、物距和旋转台单次旋转角度、CT系统空间放大倍率确定、视场FOV、系统空间分辨率、系统均一性测试、系统密度分辨率测试、射线源发散角、射线源电压大小、射线源电流大小、投影旋转角度,中心点位置以及物体到射线源的距离。
通过以上技术方案,本发明获得了如下积极技术效果:实现了对水稻植株整株的在体无损高通量自动化测量,不仅包括地面植株部分,还包括地下根系部分,将两部分测量结果进行融合,进行修正处理,获得了精确的整株三维模型,并在此基础上测量得到了精确的植株株型参数和根系性状参数,相比于现有技术而言获得了更高的效率和精度。
本申请中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例作各种修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
一种水稻植株及根系三维性状无损测量装置及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0