

IPC分类号 : G01C1/00,G01C9/00,G06T7/277,G06T17/00






专利摘要
本发明涉及无人机领域,具体提供一种基于扩展卡尔曼滤波的无人机同步定位与地图构建(SLAM)技术测量倾斜角系统,包括电力杆塔结构模型数据库模块、无人机运动与测量模块、无人机数据处理模块和杆塔模型重建模块;无人机运动与测量模块能够基于扩展卡尔曼滤波的同步定位与地图构建获取环境地图和电力杆塔的点云数据;无人机数据处理模块用于拟合出电力杆塔的中心轴线并计算出倾斜角。本发明能够让电力杆塔倾斜角的测量大大减少工作量,提高巡检输电线路及电力杆塔的工作效率,提高工作速度和智能化程度,降低人工成本、时间成本和工作难度,提高电力杆塔倾斜角测量的准确性、稳定性和易用性,更加简单易用,实现高效智能化地测量倾斜角。
权利要求
1.基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,用于测量电力杆塔的倾斜角,其特征在于:包括电力杆塔结构模型数据库模块、无人机运动与测量模块、无人机数据处理模块和杆塔模型重建模块;所述电力杆塔结构模型数据库模块用于对电力杆塔进行分类并构建对应的电力杆塔数学结构模型,以及根据所述电力杆塔数学结构模型设计无人机的初始巡检路线;所述无人机运动与测量模块能够基于扩展卡尔曼滤波的同步定位与地图构建获取环境地图和所述电力杆塔的点云数据;所述无人机数据处理模块用于根据所述环境地图和所述点云数据拟合出电力杆塔的中心轴线并计算出倾斜角;所述杆塔模型重建模块用于根据所述环境地图和所述点云数据拟合出电力杆塔的三维图像模型。
2.根据权利要求1所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述无人机运动与测量模块包括无人机、加速度传感器和激光雷达,所述加速度传感器和所述激光雷达搭载在所述无人机上,所述无人机根据不同的电力杆塔选择不同的所述初始巡检路线,所述加速度传感器用于获取所述无人机运动的加速度数据,所述激光雷达用于获取环境地图和所述电力杆塔的点云数据。
3.根据权利要求2所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述无人机为四旋翼无人机,所述点云数据包括所述电力杆塔上每个点的坐标,所述无人机的运动模型设置为环绕待测量的电力杆塔运动,所述无人机的初始状态为悬浮在距离地面一定高度的空中。
4.根据权利要求2所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述激光雷达利用激光器向所述电力杆塔发射大量的激光束,激光束打在所述电力杆塔的各个点上,再利用接收器接收反射回来的激光,获得所述电力杆塔上每个点的坐标以形成点云数据,所述无人机根据所述加速度数据和所述点云数据通过扩展卡尔曼滤波不断更新运动模型和状态方程以改变巡检路线,同时采集相关的地图数据,实现同步定位与地图构建。
5.根据权利要求2所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述无人机在环绕待测量的电力杆塔运动进行公转的同时还在自转,以使所述激光雷达能够始终对准所述电力杆塔。
6.根据权利要求2所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述无人机每公转一个固定角度,都会记录下所述电力杆塔在所述无人机视角中的左右轮廓线和相关的数据以作为观测点。
7.根据权利要求2所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述基于扩展卡尔曼滤波的同步定位与地图构建包括观测点提取、数据关联和扩展卡尔曼滤波过程;所述观测点提取是从所述点云数据中进行观测点提取,通过所述数据关联判断该观测点是否为之前观测到的,如果不是,则将该观测点加入更新状态方程;所述数据关联是在不同时间、不同地点的传感器测量之间、传感器测量与地图特征之间或不同的地图特征之间建立对应的关系,以确定它们是否源于环境中同一物理实体的过程;所述扩展卡尔曼滤波过程在进行所述观测点提取和所述数据关联之后进行,扩展卡尔曼滤波包括预测阶段、更新阶段和状态增广阶段。
8.根据权利要求7所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述预测阶段用控制量和状态向量进行下一时刻无人机位置的估计,所述无人机的初始时刻的位置由所述加速度数据提供,作为所述无人机在所述扩展卡尔曼滤波过程中的初始位置猜测,下一时刻的位置都是根据前一时刻的位置进行预测,根据估计出的位置更新状态矢量X和预测模型的雅可比矩阵A以及控制噪声矩阵对所述无人机位置进行协方差矩阵P更新,计算所述无人机自身的协方差后更新所述无人机与观测点之间的协方差矩阵P;所述更新阶段使用所述无人机观测到的观测点来计算无人机位置与估计的无人机位置之间的差异并对估计的无人机位置进行修正;所述状态增广阶段将新的观测点加入到所述状态矢量X和所述协方差矩阵P中并更新所述协方差矩阵P。
9.根据权利要求1所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述无人机数据处理模块对所述点云数据进行切割、拼接、消除杂点以得到所需数据,根据所需数据按照初始设定的电力杆塔数学结构模型在专业的数据处理软件拟合出电力杆塔的中心轴线,根据所述中心轴线与地面的夹角,计算出倾斜角。
10.根据权利要求1所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,其特征在于:所述杆塔模型重建模块根据所需数据按照初始设定的电力杆塔数学结构模型拟合出重建的电力杆塔的三维图像模型,对重建的电力杆塔的三维图像模型标注好参数信息。
说明书
技术领域
本发明涉及无人机领域,具体地提供一种基于扩展卡尔曼滤波(EKF)的无人机SLAM(同步定位与地图构建)技术测量倾斜角系统。
背景技术
电力线路中的电力杆塔是支承架空输电线路导线和架空地线并使它们之间以及与大地之间保持一定距离的杆形或塔形构筑物,通常采用钢结构、木结构和钢筋混凝土结构,电力杆塔的中心度关系到电力运行的安全性和可靠性;在施工安装时,必须确保中心度以确保线路的安全可靠运行。但是在电力线路运行多年后,由于基础地质情况的变化会引起电力杆塔的不均匀沉降,造成电力杆塔倾斜和中心度偏移,容易引起事故隐患,所以随时精准测量出倾斜角度数显得非常重要。
以前对电力杆塔的倾斜角测量是通过经纬仪、全站仪等仪器进行人工操作,例如用经纬仪和平面镜法测量倾斜角时需要先在地面上设置好多个方向桩和平面镜,有时还需要工作人员登塔作业,增加了工作强度和作业风险,测量倾斜角时所需要的准备工作太多,使得测量繁琐复杂、不够灵活、精准度差并低质低效,人力和时间成本都比较大。
现有技术中也有借助倾角传感器、摄像机、GPS定位器、无人机等对电力杆塔的倾斜角进行测量或监测,专利CN201020124341.7公开了一种杆塔倾斜在线监测系统,包括数据采集单元、接收基站以及与接收基站相连的主站计算机,所述数据采集单元包括电源、与电源相连的倾角传感器以及信号发送器;专利CN201110157735.1公开了一种基于视频差异的输电线路杆塔倾斜的测量方法,通过定焦摄像机获取杆塔图像,对得到的杆塔图像进行预处理,对得到的预处理后的图像数据进行计算,得到输电线路杆塔倾斜角;专利CN201220420007.5公开了一种输电线路杆塔倾斜监测系统,包括输电线塔、输电线、杆塔倾斜监测装置、无线通信基站和远程监控设备,杆塔倾斜监测装置安装在输电线塔上,用于实时感应输电线塔的倾斜角度并输出倾斜角度信号,杆塔倾斜监测装置包括倾角传感器;专利CN201710911478.3公开了一种基于杆塔图像的电力杆塔实时检测系统,包括智能巡检数据处理器以及电力杆塔检测终端,所述电力杆塔检测终端设有图像采集模块,所述图像采集模块用于实时采集杆塔的图像信息,所述电力杆塔检测终端还设有GPS定位模块;专利CN201811028136.8公开了一种输电线路杆塔倾斜度自动测量系统,包括无人机、搭载在无人机上的RTK定位模块和激光雷达模块、RTK定位基站、激光雷达基站,智能控制终端,所述RTK定位模块、RTK定位基站用于无人机定位、导航、并用于采集输电线路杆塔坐标、高度、横担尺寸,将采集的数据传输到智能控制终端,所述激光雷达模块、激光雷达基站用于对输电线路杆塔进行建模,建立杆塔激光点云模型,所述智能控制终端用于对数据进行处理,对无人机进行飞行控制。
发明内容
针对现有技术对电力杆塔的倾斜角进行测量或监测时存在测量繁琐复杂、不够灵活、测量精度不高等缺点,提供一种基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统。
本发明解决其技术问题所采取的技术方案是:基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,用于测量电力杆塔的倾斜角,其特征在于:包括电力杆塔结构模型数据库模块、无人机运动与测量模块、无人机数据处理模块和杆塔模型重建模块;所述电力杆塔结构模型数据库模块用于对电力杆塔进行分类并构建对应的电力杆塔数学结构模型,以及根据所述电力杆塔数学结构模型设计无人机的初始巡检路线;所述无人机运动与测量模块能够基于扩展卡尔曼滤波的同步定位与地图构建获取环境地图和所述电力杆塔的点云数据;所述无人机数据处理模块用于根据所述环境地图和所述点云数据拟合出电力杆塔的中心轴线并计算出倾斜角;所述杆塔模型重建模块用于根据所述环境地图和所述点云数据拟合出电力杆塔的三维图像模型。
优选地,所述无人机运动与测量模块包括无人机、加速度传感器和激光雷达,所述加速度传感器和所述激光雷达搭载在所述无人机上,所述无人机根据不同的电力杆塔选择不同的所述初始巡检路线,所述加速度传感器用于获取所述无人机运动的加速度数据,所述激光雷达用于获取环境地图和所述电力杆塔的点云数据。
更优选地,所述无人机为四旋翼无人机,所述点云数据包括所述电力杆塔上每个点的坐标,所述无人机的运动模型设置为环绕待测量的电力杆塔运动,所述无人机的初始状态为悬浮在距离地面一定高度的空中。
更优选地,所述激光雷达利用激光器向所述电力杆塔发射大量的激光束,激光束打在所述电力杆塔的各个点上,再利用接收器接收反射回来的激光,获得所述电力杆塔上每个点的坐标以形成点云数据,所述无人机根据所述加速度数据和所述点云数据通过扩展卡尔曼滤波不断更新运动模型和状态方程以改变巡检路线,同时采集相关的地图数据,实现同步定位与地图构建。
更优选地,所述无人机在环绕待测量的电力杆塔运动进行公转的同时还在自转,以使所述激光雷达能够始终对准所述电力杆塔。
更优选地,所述无人机每公转一个固定角度,都会记录下所述电力杆塔在所述无人机视角中的左右轮廓线和相关的数据以作为观测点。
优选地,所述基于扩展卡尔曼滤波的同步定位与地图构建包括观测点提取、数据关联和扩展卡尔曼滤波过程;所述观测点提取是从所述点云数据中进行观测点提取,通过所述数据关联判断该观测点是否为之前观测到的,如果不是,则将该观测点加入更新状态方程;所述数据关联是在不同时间、不同地点的传感器测量之间、传感器测量与地图特征之间或不同的地图特征之间建立对应的关系,以确定它们是否源于环境中同一物理实体的过程;所述扩展卡尔曼滤波过程在进行所述观测点提取和所述数据关联之后进行,扩展卡尔曼滤波包括预测阶段、更新阶段和状态增广阶段。
更优选地,所述预测阶段用控制量和状态向量进行下一时刻无人机位置的估计,所述无人机的初始时刻的位置由所述加速度数据提供,作为所述无人机在所述扩展卡尔曼滤波过程中的初始位置猜测,下一时刻的位置都是根据前一时刻的位置进行预测,根据估计出的位置更新状态矢量X和预测模型的雅可比矩阵A以及控制噪声矩阵对所述无人机位置进行协方差矩阵P更新,计算所述无人机自身的协方差后更新所述无人机与观测点之间的协方差矩阵P;所述更新阶段使用所述无人机观测到的观测点来计算无人机位置与估计的无人机位置之间的差异并对估计的无人机位置进行修正;所述状态增广阶段将新的观测点加入到所述状态矢量X和所述协方差矩阵P中并更新所述协方差矩阵P。
优选地,所述无人机数据处理模块对所述点云数据进行切割、拼接、消除杂点以得到所需数据,根据所需数据按照初始设定的电力杆塔数学结构模型在专业的数据处理软件拟合出电力杆塔的中心轴线,根据所述中心轴线与地面的夹角,计算出倾斜角。
优选地,所述杆塔模型重建模块根据所需数据按照初始设定的电力杆塔数学结构模型拟合出重建的电力杆塔的三维图像模型,对重建的电力杆塔的三维图像模型标注好参数信息。
本发明基于扩展卡尔曼滤波(EKF)的同步定位与地图构建(SLAM)技术,能够让电力杆塔倾斜角的测量大大减少工作量,提高巡检输电线路及电力杆塔的工作效率,提高工作速度和智能化程度,降低人工成本、时间成本和工作难度,提高电力杆塔倾斜角测量的准确性、稳定性和易用性,更加简单易用,实现高效智能化地测量倾斜角。
附图说明:
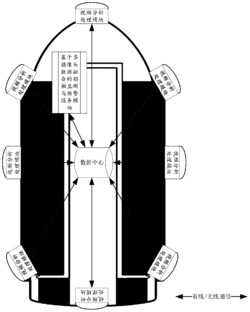
图1为本发明所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统的框架图;
图2为本发明所述的伞型钢塔的棱台模型;
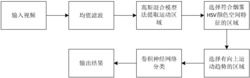
图3为本发明所述的EKF-SLAM算法的流程图;
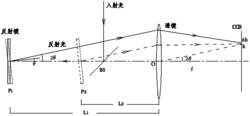
图4为本发明所述的电力杆塔轮廓投影的中心关系示意图;
图5为本发明所述的电力杆塔的矩形界面示意图;
图6为本发明所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统的倾斜角测量流程图;
图7为MATLAB模拟仿真实验的原先的电力杆塔模型和重建的电力杆塔模型对比图。
具体实施方式:
以下结合附图对本发明的内容作进一步说明。
如图1所示,本发明所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统,用于测量电力杆塔的倾斜角,包括电力杆塔结构模型数据库模块、无人机运动与测量模块、无人机数据处理模块和杆塔模型重建模块;所述电力杆塔结构模型数据库模块用于对电力杆塔进行分类并构建对应的电力杆塔数学结构模型,以及根据所述电力杆塔数学结构模型设计无人机的初始巡检路线;所述无人机运动与测量模块能够基于扩展卡尔曼滤波的同步定位与地图构建(EKF-SLAM算法)获取环境地图和所述电力杆塔的点云数据;所述无人机数据处理模块用于根据所述环境地图和所述点云数据拟合出电力杆塔的中心轴线并计算出倾斜角;所述杆塔模型重建模块用于根据所述环境地图和所述点云数据拟合出电力杆塔的三维图像模型;所述基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统具有准确性、稳定性和易用性等优点,能够使倾斜角测量达到比较高的测量精度,在正常情况下能够正常工作,在意外情况下亦能适当地处理以使可能导致的损失最小,例如在环境因素如风力、光照等或者无人机本身因素如偶尔的抖动等使得无人机测量出现偏差时,系统可以很通过设定的不同的噪声滤除方程来对数据进行处理,得到更为准确的数据,减低环境和无人机本身因素造成的影响;还能够在满足实现核心功能的前提下,提供用户简洁实用、友善的人机界面,操作简单、方便。
所述电力杆塔结构模型数据库模块用于对目前常见的几种电力杆塔进行分类,并构建合适典型的电力杆塔数学结构模型,以及根据不同的所述电力杆塔数学结构模型设计无人机的初始巡检路线;目前常见的电力杆塔的种类很多,例如伞型钢塔、电线水泥杆等;本发明以伞型钢塔举例,其本体由许多钢条构成,并从下往上逐渐缩小,呈现伞状,故名伞型钢塔。通常,这些电力杆塔都是十分巨大的,占地几十平方米,高度可达几十米,故用于观测巡检的无人机的自身体积大小相对于电力杆塔来说可忽略不计,可视为一个质点。如图2所示,本发明将上小下大的伞型钢塔简化近似看成一个棱台模型。
所述无人机运动与测量模块包括无人机、加速度传感器和激光雷达,所述加速度传感器和所述激光雷达搭载在所述无人机上;所述无人机选用普通四旋翼无人机,所述无人机根据不同的电力杆塔选择不同的所述初始巡检路线;所述加速度传感器用于获取所述无人机运动的加速度数据,所述激光雷达用于获取环境地图和所述电力杆塔的点云数据,所述点云数据包括所述电力杆塔上每个点的坐标(X,Y,Z);设置所述无人机的运动模型为环绕待测量的电力杆塔运动,所述无人机的初始状态为悬浮在距离地面一定高度(例如20~30米)的空中,当所述无人机开始环绕待测量的电力杆塔运动时,所述加速度传感器和所述激光雷达开启,所述加速度传感器获取所述无人机运动的加速度数据,所述激光雷达利用激光器向所述电力杆塔发射大量的激光束,激光束打在所述电力杆塔的各个点上,再利用接收器接收反射回来的激光,获得所述电力杆塔上每个点的坐标(X,Y,Z)以形成点云数据,所述无人机根据所述加速度数据和所述点云数据通过扩展卡尔曼滤波(EKF)不断更新运动模型和状态方程以改变巡检路线,从而帮助所述无人机导航定位,同时采集相关的地图数据,实现同步定位与地图构建(SLAM)。
优选地,所述无人机在环绕待测量的电力杆塔运动进行公转的同时还在自转,以使所述激光雷达能够始终对准所述电力杆塔,从而实现准确地获取数据;所述无人机每公转一个固定角度,都会记录下所述电力杆塔在所述无人机视角中的左右轮廓线和相关的数据,所述相关的数据具体可以包括所述无人机距离所述电力杆塔的最近点的点云数据,作为重要的观测点。
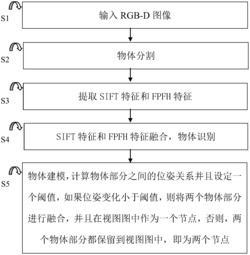
如图3所示,本发明所述的基于扩展卡尔曼滤波的同步定位与地图构建(EKF-SLAM算法)包括观测点提取、数据关联和扩展卡尔曼滤波过程;所述观测点提取是从所述点云数据中进行观测点提取,通过所述数据关联判断该观测点是否为之前观测到的,如果不是,则将该观测点加入更新状态方程;所述数据关联是在不同时间、不同地点的传感器测量之间、传感器测量与地图特征之间或不同的地图特征之间建立对应的关系,以确定它们是否源于环境中同一物理实体的过程;所述扩展卡尔曼滤波过程在进行所述观测点提取和所述数据关联之后进行,扩展卡尔曼滤波作为一种基于概率模型的状态和参数的估计方法,通常用于解决非线性系统模型的估计问题,具体包括预测阶段、更新阶段和状态增广阶段。
所述预测阶段用控制量和状态向量进行下一时刻无人机位置的估计,所述无人机的初始时刻的位置由所述加速度数据提供,作为所述无人机在所述扩展卡尔曼滤波过程中的初始位置猜测,下一时刻的位置都是根据前一时刻的位置进行预测,根据估计出的位置更新状态矢量X和预测模型的雅可比矩阵A以及控制噪声矩阵对所述无人机位置进行协方差矩阵P更新,计算所述无人机自身的协方差后更新所述无人机与观测点之间的协方差矩阵P;所述更新阶段使用所述无人机观测到的观测点来计算无人机位置与估计的无人机位置之间的差异并对估计的无人机位置进行修正;由于所述预测阶段估计的无人机位置不是真实的位置,通过所述无人机的观测点数据更新所述无人机位置的估计值;所述状态增广阶段将新的观测点加入到所述状态矢量X和所述协方差矩阵P中并更新所述协方差矩阵P。所述无人机完成基于扩展卡尔曼滤波的同步定位与地图构建(EKF-SLAM算法)之后,可以再次移动,观察观测点,关联观测点,使用测距法更新系统状态,使用重新观察的观测点更新系统状态,最后添加新的观测点。通过上述三个阶段的反复进行后,对所述无人机获取的传感器数据进行整理,得到相应的环境地图和电力杆塔的点云数据。
所述无人机数据处理模块利用设计的数据处理方法对所述点云数据进行切割、拼接、消除杂点以得到所需数据,根据所需数据按照初始设定的电力杆塔数学结构模型在专业的数据处理软件拟合出电力杆塔的中心轴线,根据所述中心轴线与地面的夹角,计算出倾斜角;为了计算电力杆塔的倾斜角,首先需要获得能代表电力杆塔塔体本身的中心轴线,通过所述无人机的巡检扫描而获取点云数据,从中提取电力杆塔的塔体主轮廓,然后拟合出电力杆塔的中心轴线。
具体以图2中的电力杆塔的棱台模型为例,当电力杆塔垂直于地面,即其倾斜角为90度时,它的中心轴线也就是法线,把电力杆塔模型的轮廓观测点投影在一个二维平面时,表现为多个同心矩形;当杆塔不垂直于地面时,电力杆塔模型的轮廓投影在同一个二维平面,表现为多个非同心矩形;在借助观测点坐标拟合求出电力杆塔轮廓投影的中心后,对这多个电力杆塔轮廓投影的中心采用最小二乘法,即可拟合出中心轴线的投影的方程。由于无人机是在距离地面一定距离的空中进行环绕电力杆塔运动的,多个矩形截面之间的高度差是可知的,则通过中心轴线的投影方程计算多个非矩形截面的中心的欧几里得距离,再通过反三角函数,即可计算出电力杆塔的中心轴线与地面的夹角,即电力杆塔的倾斜角。如图4所示,假设电力杆塔轮廓投影的一个矩形界面轮廓中心为A,另一个矩形界面轮廓中心为B,两中心投影的欧式距离为d,上下两个轮廓界面观测点的高度差为H,则已知H、d,通过反三角函数,即可计算出电力杆塔的中心轴线与地面的夹角,即电力杆塔的倾斜角。
如图5所示,将电力杆塔轮廓面观测点在地面的平面投影近似为矩形,假设该电力杆塔的矩形界面的中心为O,则由矩形的几何特性,通过最小二乘法拟合求得直线AB、BC的方程,并且可知矩形界面的中心O为其两条对角线的交点,既在AB的垂直平分线上,也在BC的垂直平分线上,所以中心O在地图数据上的横坐标与BC中点的横坐标一致,纵坐标与AB中点的纵坐标一致,如此可求出矩形界面的中心为O的位置。
所述杆塔模型重建模块根据所需数据按照初始设定的电力杆塔数学结构模型在专业的数据处理软件拟合出重建的电力杆塔的三维图像模型,在人机交互软件界面上对重建的电力杆塔的三维图像模型标注好重要的参数信息,方便用户观察和记录。
如图6所示,本发明所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角的主要流程包括(1)巡检航迹、范围规划,(2)环境地图构建、无人机定位,(3)获取电力杆塔的三维模型,(4)计算倾斜角;所述(1)巡检航迹、范围规划主要由所述电力杆塔结构模型数据库模块完成,设计出无人机的初始巡检路线;所述(2)环境地图构建、无人机定位主要由所述无人机运动与测量模块完成,能够基于扩展卡尔曼滤波的同步定位与地图构建(EKF-SLAM算法)获取环境地图和所述电力杆塔的点云数据;所述(3)获取电力杆塔的三维模型主要由所述杆塔模型重建模块完成,根据所述环境地图和所述点云数据拟合出电力杆塔的三维图像模型;所述(4)计算倾斜角主要由所述无人机数据处理模块完成,根据所述环境地图和所述点云数据拟合出电力杆塔的中心轴线并计算出倾斜角。
本发明举例通过在MATLAB仿真平台(加装SLAM TOOL工具包)进行仿真实验检验基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统的测量精度:
实验过程主要通过主要的三个仿真程序实现,分别是电力杆塔模型生成程序、无人机环绕运动并定位建图程序、无人机数据处理以及倾斜角计算程序;电力杆塔模型生成程序包括电力杆塔结构数学模型的基本参数;无人机环绕运动并定位建图程序为主程序,实现仿真的功能;无人机数据处理以及倾斜角计算程序,负责对无人机观测得到数据进行处理,借助多组观测点坐标拟合求出多个电力杆塔轮廓投影的中心后,对这多个电力杆塔轮廓投影的中心采用最小二乘法拟合出中心轴线的投影的方程,再以此展开数据的处理;通过改变初始生成的电力杆塔模型的参数,实现倾斜角90°、89°、85°、80°的改变,根据无人机围绕电力杆塔运动观测得到数据生成的电力杆塔模型,通过上文提到的算法计算出轮廓投影的中心,再根据中心的坐标通过上文的算法计算出倾斜角,结果如表1所示;
表1:倾斜角测量仿真实验结果
如图7所示,倾斜角为90度时,原先的电力杆塔模型显示为标记100,重建的电力杆塔模型显示为标记101,MATLAB模拟仿真实验证明,本发明所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统具有较高的倾斜角测量精度。
以上内容是对本发明所述的基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统作出的进一步详细说明,并非对本发明的范围进行限定,在不脱离本发明构思的前提下,本领域普通技术人员依据本发明的技术方案做出的各种变形和改进,均应视为属于本发明的保护范围。
基于扩展卡尔曼滤波的无人机SLAM技术测量倾斜角系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0