









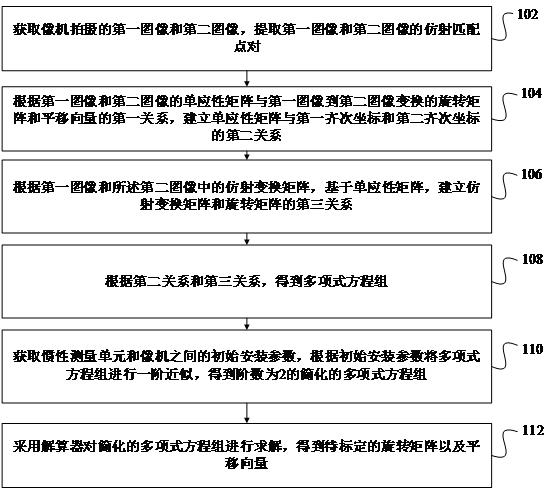
专利摘要
本发明涉及一种基于姿态实时测量矢量水听器的拖曳线列阵装置,包括按顺序排列的转接段、第一减振段、声阵段、第二减振段和尾绳段,所述的转接段连接母船的拖缆,其特征在于,所述声阵段包括姿态实时测量矢量水听器、水声信号放大及滤波模块、16通道采集传输模块、深度传感器和数据传输控制模块,所述的姿态实时测量矢量水听器包括姿态传感器。本发明的拖曳线列阵装置采用姿态实时测量矢量水听器,省去了传统拖线阵的数字段;结构简单,且单条拖线阵就可以实时分辨目标的左右舷,通过对水声信号姿态修正,切实提高目标探测精度。
权利要求
1.一种基于姿态实时测量矢量水听器的拖曳线列阵装置,包括按顺序排列的转接段、第一减振段、声阵段、第二减振段和尾绳段,所述的转接段连接母船的拖缆,其特征在于:
所述声阵段包括姿态实时测量矢量水听器、水声信号放大及滤波模块、16通道采集传输模块、深度传感器和数据传输控制模块;所述的姿态实时测量矢量水听器包括姿态传感器;所述的水声信号放大及滤波模块接收所述的姿态实时测量矢量水听器侦测的水声信号;所述的16通道采集传输模块分别与水声信号放大及滤波模块、深度传感器以及姿态实时测量矢量水听器的姿态传感器电连接,在对水声信号放大及滤波模块输出的经放大及滤波处理的水声信号进行A/D采样得到采样信号后,与从深度传感器和姿态传感器接收的数据信号进行编码,再将编码数据打包发送至数据传输控制模块;所述的数据传输控制模块对16通道采集传输模块发送时间同步信号,并将接收到的编码数据发送至转接段。
2.如权利要求1所述的一种基于姿态实时测量矢量水听器的拖曳线列阵装置,其特征在于,所述的声阵段还包括圆筒形硬塑料框架、电缆支架、拉绳和钛合金接口;所述的钛合金接口安装在声阵段的首端,具有连通转接段电缆和数据传输控制模块接口电缆的电连接器;所述的姿态实时测量矢量水听器有多个,每个姿态实时测量矢量水听器通过8根均匀分布并受力的拉伸弹簧安装在一个圆筒形硬塑料框架的内部,多个姿态实时测量矢量水听器和圆筒形硬塑料框架组成的部件沿长端方向均匀布置在声阵段内,在两个圆筒形硬塑料框架之间具有电缆支架,电缆支架与圆筒形硬塑料框架之间用拉绳进行连接;所述的钛合金接口、电缆支架和圆筒形硬塑料框架都具有直径相同的圆筒形的外壁,在钛合金接口、电缆支架和圆筒形硬塑料框架圆筒形的外壁外包裹外护套,声阵段的尾端封闭。
3.如权利要求2所述的一种基于姿态实时测量矢量水听器的拖曳线列阵装置,其特征在于,所述的姿态实时测量矢量水听器还包括三轴压电加速度传感器、压电陶瓷圆管、支撑连杆、低密度复合材料和聚氨酯透声层;所述的姿态传感器包括X、Y、Z三轴相互平行的三轴MEMS加速度传感器、三轴磁力计和三轴MEMS陀螺仪;所述的三轴压电加速度传感器位于姿态传感器正下方并且两者采用支撑连杆连接固定,三轴压电加速度传感器的X、Y、Z三轴与姿态传感器的三轴MEMS加速度传感器、三轴磁力计和三轴MEMS陀螺仪的三轴平行;所述的用支撑连杆连接固定的三轴压电加速度传感器和姿态传感器位于所述的压电陶瓷圆管内,压电陶瓷圆管内填充有低密度复合材料以固定三轴压电加速度传感器和姿态传感器,压电陶瓷圆管外壁具有聚氨酯透声层,三轴压电加速度传感器和姿态传感器的组合重心位于压电陶瓷圆管的几何中心处;所述的聚氨酯透声层外表面形成矢量水听器圆柱形的外壁;所述的压电陶瓷圆管上下两端分别具有一个低密度复合材料制成的半球帽,两个半球帽的球形外表面分别与所述的压电陶瓷圆管外壁的聚氨酯透声层的外壁光顺;所述的压电陶瓷圆管上下两端的半球帽分别均布4个悬挂孔,用于安装所述的8根均匀分布并受力的拉伸弹簧。
4.如权利要求1所述的一种基于姿态实时测量矢量水听器的拖曳线列阵装置,其特征在于,所述钛合金连接器通过多芯屏蔽电缆与所述的转接段连接,所述转接段通过同轴电缆或光纤输出数字信号至拖缆。
5.如权利要求1-4任一项所述的一种基于姿态实时测量矢量水听器的拖曳线列阵装置,其特征在于,所述外护套为聚氨酯材料,外护套内填充轻蜡油、低密度聚氨酯凝胶或聚氨酯发泡固体,拉绳材料为凯夫拉。
说明书
技术领域
本发明涉及一种水声信号接收装置,具体为一种基于姿态实时测量矢量水听器的拖曳线列阵装置。
背景技术
矢量水听器是上世纪四十年代首先在美国出现的一种新型声接收器,于上世纪末引入我国,它可以空间共点、时间同步测量水下声场中的声压标量和振速(或加速度、位移、声压梯度)矢量,相比于传统声压水听器来说具有体积小、重量轻、能有效抗各向同性干扰、空间增益大等优点,能够很好的解决声压水听器阵列在定向时目标左右舷模糊的问题,提高目标探测精度。目前,声压水听器组成的拖曳线列阵为解决定向时目标左右舷模糊问题,通常采用以下方法:
对于单条拖曳线列阵,发现目标后实行本舰机动转向的方法,通过观察目标方位变化来辨别目标方位,该方法时效性差,声纳系统有可能误判和丢失目标,本舰机动产生的噪声容易暴露本舰位置;对于双线阵或多线阵,可以利用多线阵具有多维声孔径来实现目标的被动定位,该方法需要在船只后面同时拖曳多条拖线阵,比较笨重,对于小型船只来说并不适用;对于水听器阵元采用三元水听器组的方法,即在同一个圆周上等间隔布放三只无指向性声压水听器,通过噪声相关模型解决对目标的左右舷分辨问题,该方法对阵元安装精度要求较高,基阵物理尺寸较大。
矢量水听器理论上能够解决声压水听器阵列在定向时目标左右舷模糊的问题,但矢量水听器在基于水下晃动平台特别是拖曳线列阵声纳中应用仍有很多技术难题没有解决,尤其是矢量水听器在水下晃动平台的姿态实时测量问题,制约了矢量水听器的工程应用,在实际使用难以分辨目标左右舷,并且现有的传统拖线阵还存在结构复杂等问题。
发明内容
本发明的目的是提供一种基于姿态实时测量矢量水听器的拖曳线列阵装置,采用姿态实时测量矢量水听器取代传统声压水听器,克服现有拖线阵结构复杂的缺点,实时分辨探测目标左右舷,提高拖线阵目标探测精度。
本发明具体的技术方案是一种基于姿态实时测量矢量水听器的拖曳线列阵装置,包括按顺序排列的转接段、第一减振段、声阵段、第二减振段和尾绳段,所述的转接段连接母船的拖缆,其特征在于:
所述声阵段包括姿态实时测量矢量水听器、水声信号放大及滤波模块、16通道采集传输模块、深度传感器和数据传输控制模块;所述的姿态实时测量矢量水听器包括姿态传感器;所述的水声信号放大及滤波模块接收所述的姿态实时测量矢量水听器侦测的水声信号;所述的16通道采集传输模块分别与水声信号放大及滤波模块、深度传感器以及姿态实时测量矢量水听器的姿态传感器电连接,在对水声信号放大及滤波模块输出的经放大及滤波处理的水声信号进行A/D采样得到采样信号后,与从深度传感器和姿态传感器接收的数据信号进行编码,再将编码数据打包发送至数据传输控制模块;所述的数据传输控制模块对16通道采集传输模块发送时间同步信号,并将接收到的编码数据发送至转接段。
更进一步地,所述的声阵段还包括圆筒形硬塑料框架、电缆支架、拉绳和钛合金接口;所述的钛合金接口安装在声阵段的首端,具有连通转接段电缆和数据传输控制模块接口电缆的电连接器;所述的姿态实时测量矢量水听器有多个,每个姿态实时测量矢量水听器通过8根均匀分布并受力的拉伸弹簧安装在一个圆筒形硬塑料框架的内部,多个姿态实时测量矢量水听器和圆筒形硬塑料框架组成的部件沿长端方向均匀布置在声阵段内,在两个圆筒形硬塑料框架之间具有电缆支架,电缆支架与圆筒形硬塑料框架之间用拉绳进行连接;所述的钛合金接口、电缆支架和圆筒形硬塑料框架都具有直径相同的圆筒形的外壁,在钛合金接口、电缆支架和圆筒形硬塑料框架圆筒形的外壁外包裹外护套,声阵段的尾端封闭。
更进一步地,所述的姿态实时测量矢量水听器还包括三轴压电加速度传感器、压电陶瓷圆管、支撑连杆、低密度复合材料和聚氨酯透声层;所述的姿态传感器包括X、Y、Z三轴相互平行的三轴MEMS加速度传感器、三轴磁力计和三轴MEMS陀螺仪;所述的三轴压电加速度传感器位于姿态传感器正下方并且两者采用支撑连杆连接固定,三轴压电加速度传感器的X、Y、Z三轴与姿态传感器的三轴MEMS加速度传感器、三轴磁力计和三轴MEMS陀螺仪的三轴平行;所述的用支撑连杆连接固定的三轴压电加速度传感器和姿态传感器位于所述的压电陶瓷圆管内,压电陶瓷圆管内填充有低密度复合材料以固定三轴压电加速度传感器和姿态传感器,压电陶瓷圆管外壁具有聚氨酯透声层,三轴压电加速度传感器和姿态传感器的组合重心位于压电陶瓷圆管的几何中心处;所述的聚氨酯透声层外表面形成矢量水听器圆柱形的外壁;所述的压电陶瓷圆管上下两端分别具有一个低密度复合材料制成的半球帽,两个半球帽的球形外表面分别与所述的压电陶瓷圆管外壁的聚氨酯透声层的外壁光顺;所述的压电陶瓷圆管上下两端的半球帽分别均布4个悬挂孔,用于安装所述的8根均匀分布并受力的拉伸弹簧。
更进一步地,所述钛合金连接器通过多芯屏蔽电缆与所述的转接段连接,所述转接段通过同轴电缆或光纤输出数字信号至拖缆。
更进一步地,所述外护套为聚氨酯材料,外护套内填充轻蜡油,拉绳材料为凯夫拉。
本发明的有益效果是声阵段采用具有姿态实时测量功能的复合同振式三维矢量水听器,省去外接姿态传感器;放大和滤波模块、16通道采集传输模块、数据传输控制模块等电子元件均放置于声阵段,省去了传统拖线阵的数字段;结构简单,且单条拖线阵就可以实时分辨目标的左右舷,通过对水声信号姿态修正,切实提高目标探测精度。
附图说明
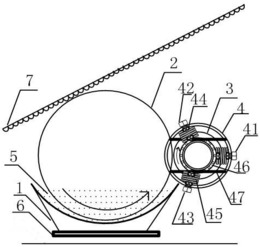
图1为本发明的拖曳线列阵装置的示意图;
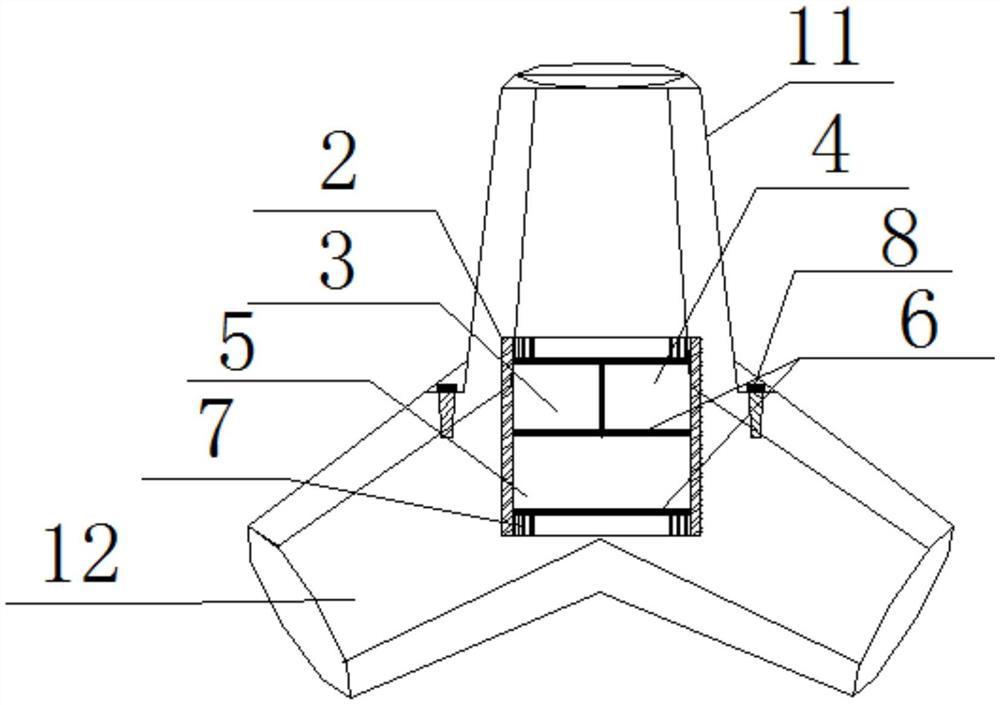
图2为本发明的拖曳线列阵装置的声阵段结构示意图;
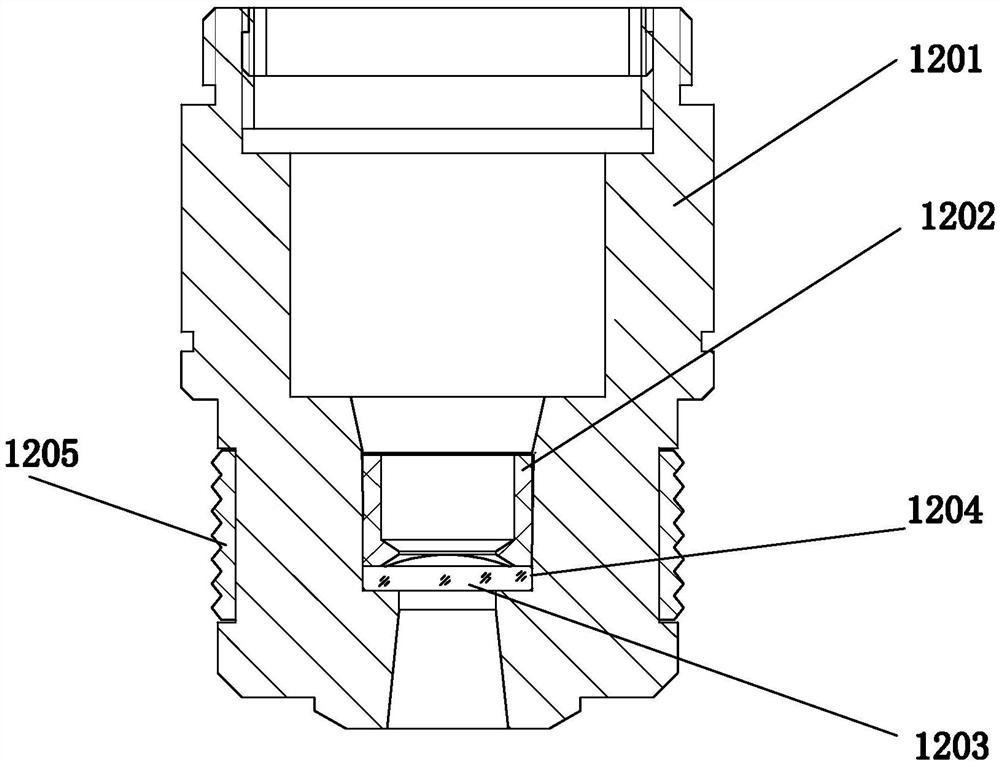
图3为本发明的拖曳线列阵装置的声阵段的姿态实时测量矢量水听器结构示意图;
图4为本发明的拖曳线列阵装置的声阵段的16通道采集传输模块示意图;
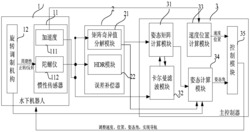
图5为本发明的拖曳线列阵装置的声阵段的原理框图。
具体实施方式
下面结合附图,对本发明的技术方案进行详细描述。
如附图1-2所示,本发明实施例一种基于姿态实时测量矢量水听器的拖曳线列阵装置,包括按顺序排列的转接段1、第一减振段2、声阵段3、第二减振段4、尾绳段5,声阵段3具有钛合金连接器309连接,外层采用聚氨酯外护套308包裹,外护套横截面尺寸为Φ70mm,厚度为5mm,外护套内部填充轻蜡油,所述转接段通过拖缆将信号传送至母船。本发明实施例所述声阵段3包括姿态实时测量矢量水听器301、信号放大及滤波模块302、深度传感器303、16通道采集传输模块304、数据传输控制模块305,各模块位置根据导线310最短的原则分布。所述姿态实时测量矢量水听器301在外护套308内等间距布放,每只姿态实时测量矢量水听器301用8根长度相等、劲度系数相同的拉伸弹簧悬挂于圆筒形硬塑料框架311内,产生4路水声信号和2路姿态信号,圆筒形硬塑料框架311用凯夫拉材料的拉绳307连接固定;所述信号放大及滤波模块302为4通道,对所述4路水声信号进行放大和滤波,同时为所述姿态实时测量矢量水听器301提供恒流源供电,增益和滤波参数可以通过母船显控界面进行设置;所述16通道采集传输模块304完成对水声信号和非水声信号的同步编码,将数据打包发送至数据传输控制模块305;所述数据传输控制模块305对16通道采集传输模块304发送时间同步指令,并将数据通过拖缆发送至母船。电缆支架306横截面处有走线电缆孔。
如附图3所示,声阵段的姿态实时测量矢量水听器301包括三轴压电加速度传感器3011、姿态传感器3012、压电陶瓷圆管3013、聚氨酯透声层3014、支撑连杆3015和低密度复合材料3016;所述的姿态传感器3012包括X、Y、Z三轴相互平行的三轴MEMS加速度传感器、三轴磁力计和三轴MEMS陀螺仪;所述的三轴压电加速度传感器3011位于姿态传感器3012正下方并且两者采用支撑连杆3015连接固定,三轴压电加速度传感器3011的X、Y、Z三轴与姿态传感器3012的三轴MEMS加速度传感器、三轴磁力计和三轴MEMS陀螺仪的三轴平行;所述的用支撑连杆3015连接固定的三轴压电加速度传感器3011和姿态传感器3012位于所述的压电陶瓷圆管3013内,压电陶瓷圆管3013内填充有低密度复合材料3016以固定三轴压电加速度传感器3011和姿态传感器3012,压电陶瓷圆管3013外壁具有聚氨酯透声层3014,三轴压电加速度传感器3011和姿态传感器3012的组合重心位于压电陶瓷圆管3013的几何中心处;所述的聚氨酯透声层3014外表面形成矢量水听器圆柱形的外壁;所述的压电陶瓷圆管3013上下两端分别具有一个低密度复合材料3016制成的半球帽,两个半球帽的球形外表面分别与所述的压电陶瓷圆管3013外壁的聚氨酯透声层3014的外壁光顺;所述的压电陶瓷圆管3013上下两端的半球帽分别均布4个悬挂孔3017,压电陶瓷圆管3013下端的半球帽引出多芯屏蔽电缆3018;该水听器所用低密度复合材料为环氧树脂和玻璃微珠混合物,二者的比例决定低密度复合材料的密度,按照质量比100:15的比例,其密度为0.8g/cm3。
姿态实时测量矢量水听器301的制作方法按以步骤:
1)将三轴压电加速度传感器3011、姿态传感器3012用支撑连杆3015连接固定,且三轴压电加速度传感器3011的X、Y、Z轴向与姿态传感器的三个轴向方向一致,再将采用支撑连杆3015固定好的三轴压电加速度传感器3011和姿态传感器3012固定于第一套模具中,第一套模具具有圆柱形的腔体,使三轴压电加速度传感器3011和姿态传感器3012的组合重心位于第一套模具腔体的几何中心处,然后,将搅拌均匀的低密度复合材料3016的原料缓慢倒入第一套模具,经室温固化、脱模、表面打磨后得到圆柱体Ⅰ;
2)将压电陶瓷圆管3013附着于圆柱体Ⅰ外表面后固定于第二套模具中,第二套模具具有圆柱形的腔体,使圆柱体Ⅰ和压电陶瓷圆管3013的重心位于第二套模具腔体的的几何中心处,然后,将搅拌均匀的聚氨酯透声层3014的材料原料缓慢倒入第二套模具,最后在鼓风干燥箱干燥以及室温固化、脱模、表面打磨后得到圆柱体Ⅱ。
3)将圆柱体Ⅱ固定于第三套模具中,第三套模具用于成形压电陶瓷圆管上下两端的对称的两个半球帽,使圆柱体Ⅱ的重心位于待成型矢量水听器的几何中心处,然后,将低密度复合材料3016的原料缓慢倒入第三套模具,最后,经室温固化、脱模、表面打磨后得到姿态实时测量矢量水听器301。
其中,三轴压电加速度传感器3011构成矢量水听器矢量通道、压电陶瓷圆管3013构成其声压通道、姿态传感器3012实时显示矢量水听器的姿态信息,在实际使用过程中将水听器用8根参数一致的拉伸弹簧通过悬挂孔3017悬挂于圆筒形硬塑料框架311内部,通过姿态传感器3012所得实时姿态角度对矢量通道接收水声信号进行姿态修正,从而对目标进行高精度测向和测距。
如附图4所示,本发明实施例所述16通道采集传输模块304具有16通道A/D采样功能、电压转换功能、TTL串口;所述A/D采样精度为24位、采样频率为10kHz;所述电压转换功能可以完成高压直流电源到16通道采集传输模块304所需电压的转换,包括姿态传感器所需直流5V电源模块、深度传感器303所需直流12V电源模块、放大及滤波模块302和A/D转换模块所需+16V、-16V电源模块;所述TTL串口可以完成姿态传感器3012和深度传感器303数据的接入;所述16通道采集传输模块304通过接收数据传输控制模块305发来的时间同步信号,完成水声信号和非水声信号的数据编码,并将数据打包发送至数据传输控制模块305。
如附图5所示,本实施例共有20只姿态实时测量矢量水听器301、20块放大及滤波模块302、5只深度传感器303、5块16通道采集传输模块304、1块数据传输控制模块305;所述每只姿态实时测量矢量水听器301后接1块放大及滤波模块302,每块16通道采集传输模块304完成4只姿态实时测量矢量水听器301水声信号和非水声信号以及深度传感器303数据的采集和编码,5块16通道采集传输模块304接收数据传输控制模块305时间同步指令,完成所有水声信号和非水声信号的时间同步编码。
本实施例中护套内部亦可以填充低密度聚氨酯凝胶或者是聚氨酯发泡固体;声阵段中矢量水听器数目可以增加或减少,亦可以按非等间距排列构成稀疏阵。
一种基于姿态实时测量矢量水听器的拖曳线列阵装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0