

IPC分类号 : G01N21/21,G01J3/447,G01J3/28,G01J4/00







专利摘要
本发明提供一种多功能Stokes‑Mueller矩阵成像偏振仪的标定方法,采用本征值标定法,能够实现对反射系统和透射系统以及系统各个元件的精确标定。本发明采用一次本征值标定法和分步本征值标定法分别对该系统进行标定,不仅实现了偏振仪的高精度测量,还完成了对系统中所有器件的单独标定,可以确定每个元件的误差大小,从而确定整个系统的误差链,最终提高仪器的测量精度。该标定方法操作简单、可行性强、标定精度高。
权利要求
1.一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法,其特征在于,
在样品台上放置标准平面反射镜,其Mueller矩阵为M
获得GT
步骤301,不加任何标定样品,获得探测器探测的光强矩阵I
I
步骤302,依次将标定样品S
I
其中,S
步骤303,利用I
对式(7)进行计算求得GT
GT
然后再根据式(5)求得AT
AT
2.如权利要求1所述的多功能Stokes-Mueller矩阵成像偏振仪的标定方法,其特征在于,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,将标定样品S
3.如权利要求1所述的多功能Stokes-Mueller矩阵成像偏振仪的标定方法,其特征在于,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,采用分步本征值标定法对透射系统进行标定,具体步骤为:
步骤201,将标定样品S
G1
其中,G
步骤202,将标定样品S
A2
步骤203,将标定样品S
A3
对式(3)进行变换如下式:
M
将式(1)和式(2)中获得的A
4.一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法,其特征在于,采用分步本征值标定法对反射系统进行标定,具体步骤为:
步骤401,在样品台上放置标准平面反射镜,其Mueller矩阵为M
移除系统中的物镜,将标定样品S
G1
其中,n=1,2,3,S
Bs
步骤402,将标定样品S
G2
步骤403,不加任何标定样品,获得探测器探测的光强矩阵I
将标定样品S
其中,M
步骤404,利用I
则对式(14)进行计算求得:
G3
再根据式(15)求得Bs
Bs
根据式(12)、(13)和式(15)求得Bs
Bs
步骤405,将物镜放入系统中,将标定样品放置在平面反射镜和物镜之间,采用一次本征值标定法获得当前PSG的仪器矩阵G4
G4
则根据式(15)以及式(18)求得光束第一次通过物镜时物镜的Mueller矩阵M
M
光束第二次通过物镜时物镜的Mueller矩阵M
M
其中,I
5.如权利要求4所述的多功能Stokes-Mueller矩阵成像偏振仪的标定方法,其特征在于,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,将标定样品S
6.如权利要求4所述的多功能Stokes-Mueller矩阵成像偏振仪的标定方法,其特征在于,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,采用分步本征值标定法对透射系统进行标定,具体步骤为:
步骤201,将标定样品S
G1
其中,G
步骤202,将标定样品S
A2
步骤203,将标定样品S
A3
对式(3)进行变换如下式:
M
将式(1)和式(2)中获得的A
说明书
技术领域
本发明属于偏振像差检测技术领域,尤其涉及一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法。
背景技术
Mueller矩阵成像偏振仪已广泛应用于光电子器件、量子光学、光通讯及生物医药科技等新型领域中。随着这些新型领域中样品测量尺寸越来越小以及测量结构装置越来越复杂,对Mueller矩阵成像偏振仪的精度要求也越来越高。而实现Mueller矩阵成像偏振仪高精度测量的关键在于如何对系统进行精确标定。
传统的Mueller矩阵偏振仪主要由偏振态产生器和偏振态分析器组成。通过调制偏振态产生器与偏振态分析器完成对样品偏振像差的测量。为了提高偏振像差的测量精度,需要对Mueller矩阵偏振仪进行标定。Mueller矩阵偏振仪的标定方法主要有傅里叶分析法、极大似然法和本征值标定法。其中,傅里叶分析法只考虑了Mueller矩阵偏振仪中5个主要误差源:偏振态产生器中1/4波片相位延迟量误差及其快轴方位角误差,偏振态分析器中1/4波片相位延迟量误差及其快轴方位角误差与偏振片透光轴的方位角误差,并没有考虑1/4波片和偏振片的透过率误差等其他误差,使得标定结果不精确;极大似然法和本征值标定法都需要用到至少2个标定样品,并且需要对每种标定样品进行至少16次测量,其中,极大似然法为了能够采用极大似然法进行数据处理,将偏振态产生器和偏振态分析器的仪器矩阵分别进行了参数化处理,在处理过程中有一些不合理性;现在主流的标定法为本征值标定法,通过标定偏振态产生器的仪器矩阵和和偏振态分析器的仪器矩阵完成Mueller矩阵偏振仪的标定。
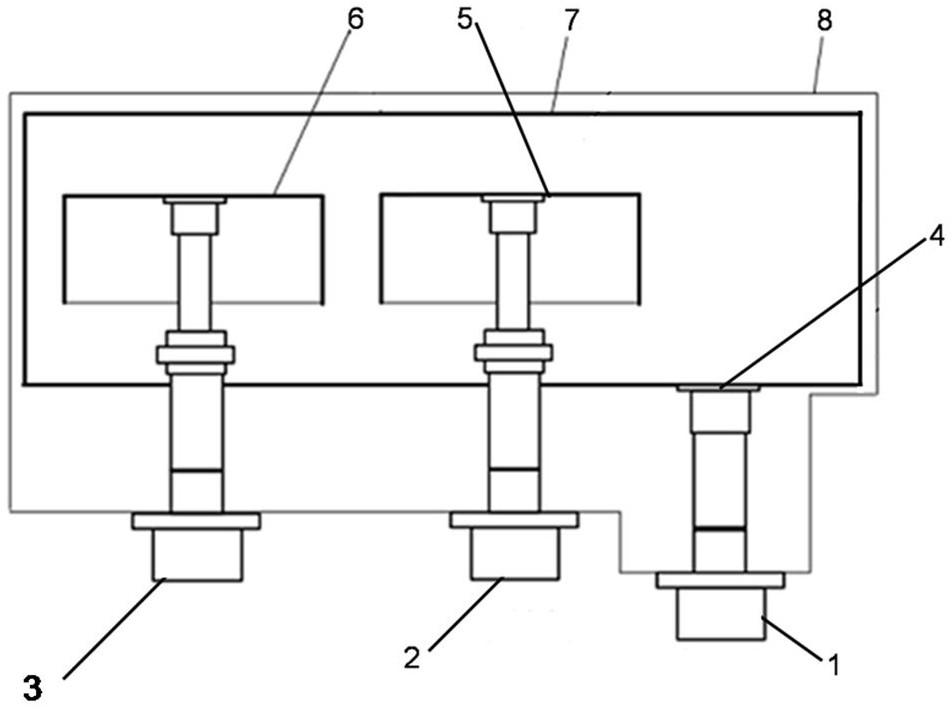
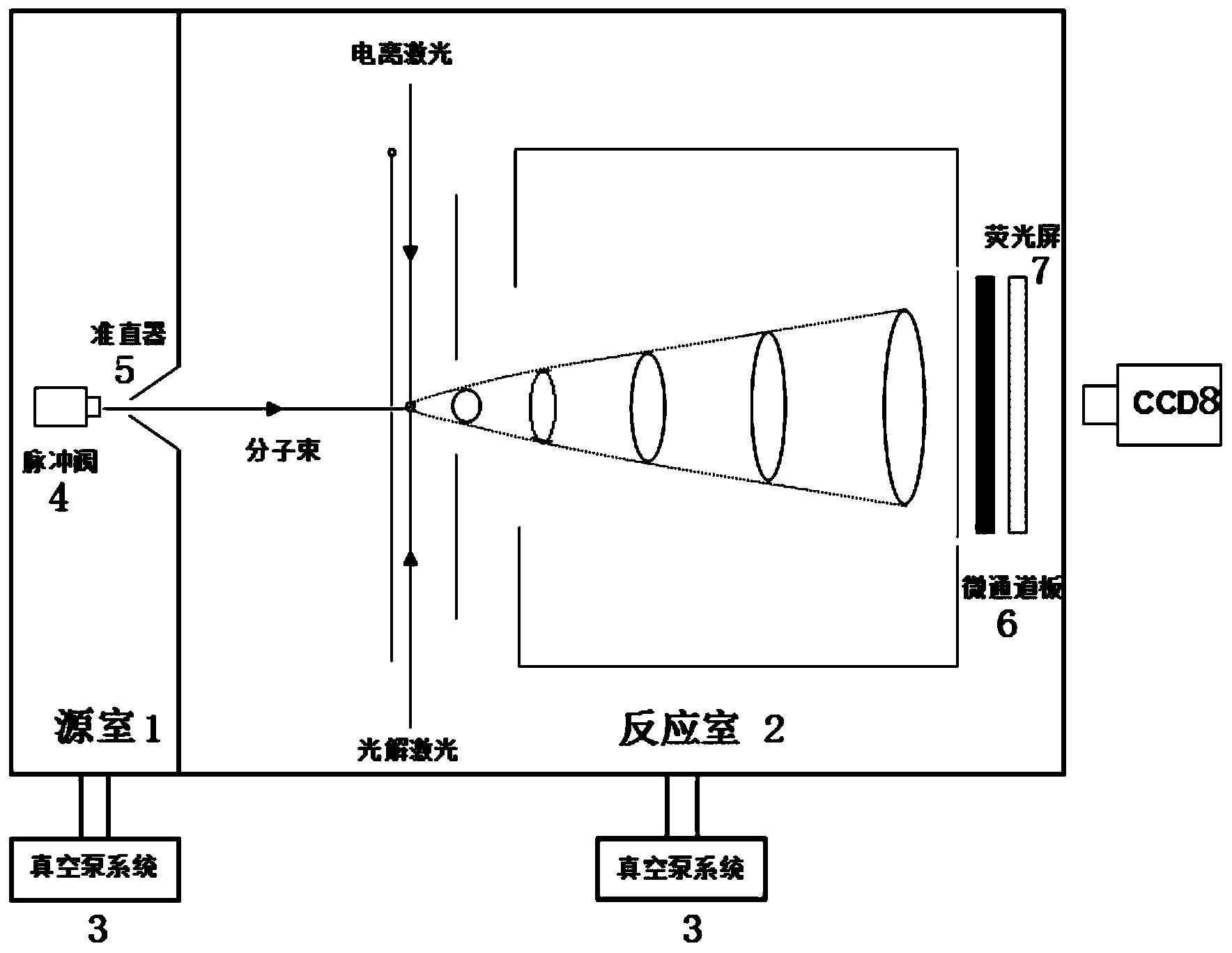
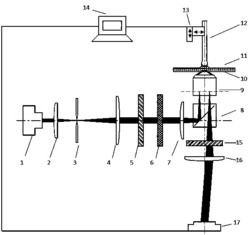
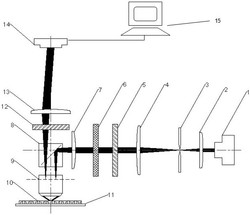
申请号为201910989198.3的《一种多功能Stokes-Mueller成像及光谱探测系统和检测方法》专利中涉及一种多功能Stokes-Mueller矩阵成像偏振仪,该成像偏振仪涉及透射系统和反射系统,如图1所示,透射系统包括透射光源101、用于将来自光源的光束起偏为不同偏振态的偏振态产生器(PSG)102、用于将来自偏振态产生器产生的偏振光束照射到待测样品的聚光镜103、用于承载待测样品的样品台104、用于接收来自样品的成像光束的物镜105、用于对光束进行分离的分束镜106,用于对经过物镜的成像光束进行检偏的偏振态分析器(PSA)107、用于对检偏后的光束做成像的探测器108以及用于控制以上器件并对来自探测器的数据做处理的计算机;反射系统包括反射光源111、用于将来自光源的光束起偏为不同偏振态的PSG 112、用于将来自偏振态产生器产生的偏振光束照射到待测样品的聚光镜103、用于承载待测样品的样品台104、用于接收来自样品的成像光束的物镜105、用于对光束进行分离的分束镜106、用于对经过物镜的成像光束进行检偏的PSA107、用于对检偏后的光束做成像的探测器108以及用于控制以上器件并对来自探测器的数据做处理的计算机;对于透射系统,光源101出射的光经过偏振态102的起偏后,透过聚光镜103,照射到样品台104上的样品,样品透射处的光被物镜105收集,经过偏振态分析器107的检偏后,被探测器108接收。对于反射系统,光源111出射的光经过偏振态产生器112的起偏后,经过分束镜106的反射,透过物镜105照射到样品台104上的样品,样品反射的光被物镜105收集,透过分束镜106再经过偏振态分析器107的检偏后,被探测器108接收。但是对于反射系统的标定无法采用现有的本征值标定法实现,现有的本征值标定法都是针对Mueller矩阵偏振仪的标定,对于成像偏振仪的标定并没有完整的描述。成像偏振仪除了偏振态产生器和偏振态分析器偏振元件外还有聚光镜,准直镜,分束镜这些非偏振元件,也会引入测量误差,需要对其标定。
发明内容
有鉴于此,本发明提出了一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法,采用本征值标定法,能够实现对反射系统和透射系统以及系统各个元件的精确标定。
为实现上述目的,本发明的一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法,在样品台上放置标准平面反射镜,其Mueller矩阵为MR;采用一次本征值标定法对反射系统进行标定,获得PSG的仪器矩阵GTR以及PSA的仪器矩阵ATR,完成标定;其中,GTR为光束第一次通过物镜时物镜的Mueller矩阵ML1f、光束第一次通过分束镜时分束镜的Mueller矩阵Bsf和PSG的Mueller矩阵GR的乘积;ATR为PSA的Mueller矩阵AR、光束第二次通过分束镜时分束镜的Mueller矩阵Bsb和光束第二次通过物镜时物镜的Mueller矩阵ML1b的乘积;
获得GTR和ATR具体步骤如下:
步骤301,不加任何标定样品,获得探测器探测的光强矩阵I10:
I10=AR·Bsb·ML1b·MR·ML1f·Bsf·GR (5)
步骤302,依次将标定样品Sn,其中n=1,2,3,放置在物镜和标准平面反射镜之间,获得对应的探测器探测的光强矩阵I1n:
I1n=AR·Bsb·ML1b·Mrbn·MR·Mrfn·ML1f·Bsf·GR (6)
其中,S1代表透光轴方向为水平方向的偏振片,S2代表透光轴方向为垂直方向的偏振片,S3代表快轴方位角为30快的四分之一波片;Mrbn为光束第二次通过标定样品Sn时标定样品Sn的Mueller矩阵,Mrfn为光束第一次通过标定样品Sn时标定样品Sn的Mueller矩阵;
步骤303,利用I10和I1n构建矩阵C1n:
对上式(7)进行计算可求得GTR:
GTR=ML1f·Bsf·GR (9)
然后再根据式(5)求得ATR:
ATR=AR·Bsb·ML1b=I10·GTR
其中,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,将标定样品Sn放置在聚光镜和物镜之间的样品台上,采用一次本征值标定法对透射系统进行标定,获得PSG当前的仪器矩阵GTT以及PSA当前的仪器矩阵ATT,完成标定;其中,GTT为聚光镜的Mueller矩阵和PSG的Mueller矩阵的乘积;ATT为PSA的Mueller矩阵和物镜的Mueller矩阵的乘积。
其中,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,采用分步本征值标定法对透射系统进行标定,具体步骤为:
步骤201,将标定样品Sn放置在PSG和聚光镜之间时,运用一次本征值标定法获得当前PSG的仪器矩阵G1T和当前PSA的仪器矩阵A1T:
G1T=GT,A1T=AT·ML1·ML2 (1)
其中,GT为PSG的Mueller矩阵,AT为PSA的Mueller矩阵,ML1为物镜的Mueller矩阵,ML2为聚光镜的Mueller矩阵;
步骤202,将标定样品Sn放置在PSA和物镜之间时,运用一次本征值标定法获得当前PSG的仪器矩阵G2T和当前PSA的仪器矩阵A2T:
A2T=AT,G2T=ML1·ML2·GT (2)
步骤203,将标定样品Sn放置在聚光镜和物镜之间时,运用一次本征值标定法获得当前PSG的仪器矩阵G3T和当前PSA的仪器矩阵A3T:
A3T=AT·ML1,G3T=ML2·GT (3)
对(3)式进行变换如下式:
ML1=AT
将式(1)和式(2)中获得的AT和GT带入到(4)中,获得ML1和ML2,完成透射系统中的GT、AT、ML1和ML2标定。
本发明还提供了另一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法,采用分步本征值标定法对反射系统进行标定,具体步骤为:
步骤401,在样品台上放置标准平面反射镜,其Mueller矩阵为MR;
移除系统中的物镜,将标定样品Sn放置在PSG和分束镜之间,采用一次本征值标定法获得当前PSG的仪器矩阵G1R和当前PSA的仪器矩阵A1R:
G1R=GR,A1R=AR·Bsb·MR·Bsf (11)
其中,n=1,2,3,S1代表透光轴方向为水平方向的偏振片,S2代表透光轴方向为垂直方向的偏振片,S3代表快轴方位角为30快的四分之一波片;
Bsf为光束第一次通过分束镜时分束镜的Mueller矩阵,GR为PSG的Mueller矩阵,AR为PSA的Mueller矩阵,Bsb为光束第二次通过分束镜时分束镜的Mueller矩阵;
步骤402,将标定样品Sn放置在PSA和分束镜之间,采用一次本征值标定法获得当前PSG的仪器矩阵G2R和当前PSA的仪器矩阵A2R:
G2R=Bsb·MR·Bsf·GR,A2R=AR (12)
步骤403,不加任何标定样品,获得探测器探测的光强矩阵I20;
将标定样品Sn放置在平面反射镜和分束镜之间,获得探测器探测的光强矩阵I2n;I20和I2n满足如下表达式:
其中,Mrbn为光束第二次通过标定样品Sn时标定样品Sn的Mueller矩阵,Mrfn为光束第一次通过标定样品Sn时标定样品Sn的Mueller矩阵;
步骤404,利用I20和I2n构建矩阵C2n:
则对上式(14)进行计算可以求得:
G3R=Bsf·GR (15)
再根据式(15)可求得Bsf:
Bsf=G3R·GR
根据式(12)、(13)和式(15)可求得Bsb:
Bsb=AR
步骤405,将物镜放入系统中,将标定样品放置在平面反射镜和物镜之间,采用一次本征值标定法获得当前PSG的仪器矩阵G4R:
G4R=ML1f·Bsf·GR=ML1f·G3R (18)
则根据式(15)以及式(18)求得光束第一次通过物镜时物镜的Mueller矩阵ML1f:
ML1f=G4R·G3R
光束第二次通过物镜时物镜的Mueller矩阵ML1b为:
ML1b=(AR·Bsb)
其中,I10=AR·Bsb·ML1b·MR·ML1f·Bsf·GR,完成系统中所有器件的标定。
其中,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,将标定样品Sn放置在聚光镜和物镜之间的样品台上,采用一次本征值标定法对透射系统进行标定,获得PSG当前的仪器矩阵GTT以及PSA当前的仪器矩阵ATT,完成标定;其中,GTT为聚光镜的Mueller矩阵和PSG的Mueller矩阵的乘积;ATT为PSA的Mueller矩阵和物镜的Mueller矩阵的乘积。
其中,还包括对透射系统进行标定的步骤,具体如下:
移除标准平面反射镜,采用分步本征值标定法对透射系统进行标定,具体步骤为:
步骤201,将标定样品Sn放置在PSG和聚光镜之间时,运用一次本征值标定法获得PSG当前的仪器矩阵G1T和PSA当前的仪器矩阵A1T:
G1T=GT,A1T=AT·ML1·ML2 (1)
其中,GT为PSG的Mueller矩阵,AT为PSA的Mueller矩阵,ML1为物镜的Mueller矩阵,ML2为聚光镜的Mueller矩阵;
步骤202,将标定样品Sn放置在PSA和物镜之间时,运用一次本征值标定法获得PSG当前的仪器矩阵G2T和PSA当前的仪器矩阵A2T:
A2T=AT,G2T=ML1·ML2·GT (2)
步骤203,将标定样品Sn放置在聚光镜和物镜之间时,运用一次本征值标定法获得PSG当前的仪器矩阵G3T和PSA当前的仪器矩阵A3T:
A3T=AT·ML1,G3T=ML2·GT (3)
对(3)式进行变换如下式:
ML1=AT
将式(1)和式(2)中获得的AT和GT带入到(4)中,获得ML1和ML2,完成透射系统中的GT、AT、ML1和ML2标定。
有益效果:
1)、本发明中涉及的方法适用于多功能Stokes-Mueller矩阵成像偏振仪的反射系统,具有标定方法操作简单、标定精度高的优点。
2)、本发明中涉及的方法可以标定出系统中每个元件的误差大小,确定整个系统的误差链,最终提高仪器的测量精度。
3)、本发明的方法适用于任意NA的偏振成像系统中,包括但不仅限于高分辨显微镜、望远镜和用于制备超大规模集成电路的光刻系统。
附图说明
图1为多功能Stokes-Mueller矩阵成像偏振仪示意图。图中实心箭头表示透射照明和成像光路,空心箭头表示反射照明光路。
其中,101-透射光源,102-偏振态产生器,103-聚光镜,104-样品台,105-物镜,106-分束镜,107-偏振态分析器,108-探测器,111-反射光源,112-偏振态产生器(反射系统)。
图2为偏振态产生器示意图。
其中,221-线偏振片P1,222-延迟器R1。
图3为偏振态分析器示意图。
其中,371-延迟器R2,372-线偏振片P2。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明采用一次本征值标定法和多步本征值标定法对多功能Stokes-Mueller矩阵成像偏振仪的反射系统进行标定,可以完成对该成像偏振仪中所有的光学元件的标定,包括偏振光学元件和非偏振光学元件,而且适用于透射和反射两种模式。
为了提高仪器的测量精度,采用一次本征值标定法对透射系统和反射系统进行标定,可以实现多功能Stokes-Mueller矩阵成像偏振仪的高精度测量,采用分步本征值标定法对透射系统和反射系统进行标定,可以完成对系统所有器件的单独标定,具体如下:
(1)透射系统的一次本征值标定法步骤为:
将标定样品Sn放置在聚光镜和物镜之间的样品台上,采用一次本征值标定法对透射系统进行标定,获PSG当前的仪器矩阵GTT以及PSA当前的仪器矩阵ATT,完成标定;
其中,n=1,2,3,S1代表透光轴方向为水平方向的偏振片,S2代表透光轴方向为垂直方向的偏振片,S3代表快轴方位角为30°的四分之一波片;
GTT为聚光镜的Mueller矩阵和PSG的Mueller矩阵的乘积;ATT为PSA的Mueller矩阵和物镜的Mueller矩阵的乘积。
(2)透射系统的分步本征值标定法步骤为:
步骤201,将标定样品Sn放置在PSG和聚光镜之间时,运用一次本征值标定法获得PSG当前的仪器矩阵G1T和PSA当前的仪器矩阵A1T:
G1T=GT,A1T=AT·ML1·ML2 (1)
其中,GT为PSG的Mueller矩阵,AT为PSA的Mueller矩阵,ML1为物镜105的Mueller矩阵,ML2为聚光镜的Mueller矩阵;
步骤202,将标定样品Sn放置在PSA和物镜之间时,运用一次本征值标定法获得PSG当前的仪器矩阵G2T和PSA当前的仪器矩阵A2T:
A2T=AT,G2T=ML1·ML2·GT (2)
步骤203,将标定样品Sn放置在聚光镜和物镜之间时,运用一次本征值标定法获得PSG当前的仪器矩阵G3T和PSA当前的仪器矩阵A3T:
A3T=AT·ML1,G3T=ML2·GT (3)
对(3)式进行变换如下式:
ML1=AT
将(1)和(2)中获得的AT和GT带入到(4)中,便可以获得ML1和ML2。在此完成透射系统中的GT、AT、ML1和ML2标定。
(3)反射系统的一次本征值标定法步骤为:
在样品台上放置标准平面反射镜,其Mueller矩阵为MR;采用一次本征值标定法对反射系统进行标定,获得PSG当前的仪器矩阵GTR以及PSA当前的仪器矩阵ATR,完成标定;
其中GTR为光束第一次通过物镜时物镜的Mueller矩阵ML1f、光束第一次通过分束镜时分束镜的Mueller矩阵Bsf和PSG的Mueller矩阵GR的乘积;ATR为PSA的Mueller矩阵AR、光束第二次通过分束镜
一种多功能Stokes-Mueller矩阵成像偏振仪的标定方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0