








专利摘要
本发明属于阵列信号处理技术领域,具体的说是涉及一种基于相位补偿的动目标DOA跟踪方法。本发明针对基于DOA的无参考波形动目标跟踪研究中信号空间谱扩展的问题,提出了一种相位补偿的方法,能够实现将动目标扩展空间谱集聚为线谱。经过补偿的数据有助于相干积累以提升信噪比,实现动目标的DOA跟踪。
权利要求
1.一种基于相位补偿的动目标DOA跟踪方法,其特征在于,包括以下步骤:
S1、对信号进行采样得到采样序列{ym(t)},其中m=1~M,M为阵元数,t表示采样时刻,快拍数为T;
S2、对采样序列{ym(t)}各个快拍时刻t进行相位补偿,补偿量为exp(-jpwαt),其中p=[p1…pM]Η是以半波长为单位的阵元位置,α为待估参数,w为动目标角速度;
S3、求解待估参数α:
计算各个快拍时刻t在初始角度θ0处的总瞬时功率强度F(α|θ0),并以此作为目标函数,则求解α的方法包括搜索法、梯度下降法和牛顿迭代法;
所述搜索法包括:
S311、离散化待估参数α,设置搜索步进量,得到待估参数α的各个离散化网格点;
S312、计算各个离散网格点处目标函数F(α|θ0)的函数值;
S313、搜索目标函数的最大值,该离散网格点所对应的α即为搜索结果;
所述梯度下降法包括:
S321、设置迭代初值α,初始补偿角速度,以及最大迭代次数;
S322、以α=α+γf'(α)为迭代公式,计算目标函数F(α|θ0)在各点的函数值,其中γ为迭代步长;
S323、判断目标函数值,若函数值在某个数值附近来回震荡,则已经收敛;否则,回到步骤S322进行下一次迭代,直至收敛或达到最大迭代次数;
所述牛顿迭代法包括:
S331、设置迭代初值α,初始补偿角速度,以及最大迭代次数;
S332、以 为迭代公式,计算目标函数F(α|θ0)在各点的函数值,其中h为迭代步长;
S333、以 为收敛条件,判断是否收敛;若满足收敛条件,则以当前α作为所求点,终止计算;否则,回到步骤S332进行下一次迭代,直至满足收敛条件或达到最大迭代次数。
说明书
技术领域
本发明属于阵列信号处理技术领域,具体的说是涉及一种基于相位补偿的动目标DOA跟踪方法。
背景技术
阵列信号处理是信号处理的一个重要分支,它着重于对空间分布的一组传感器所接收的空间传输波信号进行处理,从接收的信号中提取出有用信号的特征以及信号所包含的信息,达到增强有用信号,抑制无用干扰和噪声的目的。与传统的单个定向传感器相比,传感器阵列具有较高的信号增益、灵活的波束控制、很高的空间分辨率以及极强的干扰抑制能力。
信号的波达方向(Direction Of Arrival,DOA)估计是阵列信号处理领域的一个非常重要的研究内容,不仅能对目标进行空间定位,还为接收过程中的信号增强提供技术上的支持。空间谱则是阵列信号处理中的一个重要概念,空间谱表示信号在空间各个方向上的能量分布。因此如果能得到信号的空间谱,就能得到信号的波达方向(DOA)。所以,空间谱估计常称为DOA估计,即对空间信号的波达方向的分布进行超分辨估计。空间谱估计技术所具有的超高的空间信号的分辨能力,能突破并进一步改善一个波束宽度内的不同空间以提高信号的分辨能力。
波达方向(DOA)跟踪是指对无参考波形的运动目标进行实时估计DOA。DOA跟踪与DOA估计的不同之处在于,DOA跟踪是针对运动方向实时变化的运动目标,而DOA估计则只是针对静止目标。DOA跟踪需解决的问题包括运动目标导致的空间谱扩展,以及低信噪比的情况下运动目标快拍信号难以实现长时间相参积累。而充分利用目标快拍信号相位信息的相参积累,可有效提高信噪比,实现对运动目标的实时DOA跟踪。
信号的DOA估计算法大多是一种极值搜索法,即首先形成一个包含待估计参数的函数(伪谱函数),然后通过对该函数进行峰值搜索,得到的极值就是信号的波达方向。以均匀线阵(Uniform Linear Array,ULA)为例,如图1所示,将M个阵元等距离排列成一直线,阵元间距为d。假定信源位于远场,即其信号到达各阵元的波前为平面波,其波达方向(DOA)定义为与阵列法线的夹角θ。若目标为运动目标,则任意时刻接收信号为:
y(t)=a(θt)s(t)+n(t)(0-1)
其中,θt是t时刻目标所处的方向,y(t)是在第t个快拍的观测向量,a(θt)是阵列导向矢量,s(t)远场信号。n(t)是M×1维零均值复高斯分布噪声向量,方差为σ2IM。信号s(t)与噪声n(t)不相关。输入信噪比SNRi定义为:
其中s(t)远场信号,n(t)是噪声,E(|·|2)表示均方值,即平均功率。
阵列导向向量a(θt)=[exp(jp1sinθt)…exp(jpMsinθt)]Η,其中p=[p1…pM]Η是以半波长为单位的阵元位置。为了方便分析和建模,引入如下假设:(1)设运动目标位于法线方向附近,即θt≈0,则sinθt=θt,由此a(θt)≈[exp(jp1θt)…exp(jpMθt)]Η=exp(jpθt)Η。(2)假设目标以阵元为中心作匀速圆周运动,即θt=θ0+ωt,其中θ0为初始角度,ω为运动目标角速度。一般情况下,目标作匀速直线运动的情况较多,但是在远场条件下,匀速直线运动可以近似为匀速圆周运动。
阵列实现了对信号空间信息的采样,因此阵列接收的每一个快拍数据都包含了目标当前时刻的空间信息。目标t时刻在θ方向上的瞬时空间谱为:
目标在一段时间内的空间谱为:
由于 可近似为sinc函数,当θ=θt时,P(θ)取得峰值;当θ远离θt时,P(θ)具有较快的衰减效应。近似分析可以只取θt两侧一定宽度,比如 的第一个零点位置BW。瞬时空间谱的带宽是由空间采样方式,即阵列布阵方式所决定。因此: 其中BW为sinc函数第一零点位置。
那么目标在一段时间目标总的空间谱为
结合以上近似分析有,
图2是运动目标一段时间的空间谱仿真结果。实线为P(θ),点划线为 可以看到两者比较符合。阵列方式为以半波长为间距的均匀线阵,阵元数为100,信号为恒模型号。可知对于移动目标,其空间谱是带状分布的,也就是空间谱的能量在方向上是分散的,在需要使用较长时间积累的场景下不利于目标检测。
根据以上分析,可知目标运动导致空间谱扩展,此时信号的DOA估计无法进行峰值搜索。
发明内容
本发明的目的是,针对动目标的扩展空间谱,提出一种相位补偿的思想使得动目标的宽带空间谱集聚为线谱,提供一种基于相位补偿的动目标DOA跟踪方法。本发明中提出了三种数值方法实现相位补偿。
对t时刻阵列接收数据作相位补偿exp(-jpwαt),其中α是一个系数,那么该时刻在初始角度θ0处的强度即目标函数可表示为
f(α|t,θ0)
=|exp(jpθ0)H[y(t)⊙exp(-jpwαt)]|2
=(exp(jpθ0)H[y(t)⊙exp(-jpwαt)])H(exp(jpθ0)H[y(t)⊙exp(-jpwαt)])(0-7)
在一段时间内,经过相位补偿的信号在初始角度θ0处的总强度
如果对运动导致的相差进行了完全的补偿,即α=1,此时经过相位补偿的信号总的空间谱将呈现线谱状。注意相位补偿的过程并不改变空间谱的总能量,只是改变了空间谱在空间上的分布。当完全补偿相位时,所有的空间谱能量将集聚在一个方位上,此时单根谱线能量达到最大,这等价于
为了方便数值求解,下面给出目标函数f(α|t,θ0)的一阶和二阶导数
结合上述分析,假设初始角度θ0已知。实际中该值可以通过初始若干快拍数据进行估计。因为远场条件下,在较短时间内目标可近似认为没有移动,即此时的空间谱是一个线谱模型。可以采用MUSIC等空间谱算法计算初始的角度θ0。
求得θ0后,进一步利用后文提出的算法可以求得α。则目标任意时刻的角度θt可由θt=θ0+ωt计算得出。进一步由下式
可求得远场信号s(t)的估计,经过相位补偿处理的y(t)易于相参积累。输出信噪比SNRo定义为:
其中 是远场信号s(t)的估计,n(t)是噪声,E(|·|2)表示均方值,即平均功率。比较输出信噪比SNRo与输入信噪比SNRi,可知该方法可提升信噪比。
三种实现相位补偿的数值方法包括搜索法、梯度法、牛顿迭代法。
(1)搜索法:
初始角度θ0已知,对目标函数进行一维搜索。观察目标函数及其一二阶导数图像,可得到对目标的最大角速度的一个估计ωmax,那么对(-1,1)ωmax进行离散化,便可以计算每一个离散网格点上对应的目标函数值,最后取出最大值所对应的α。
(2)梯度下降法:
梯度下降法是最早的求解无约束多元函数极值的数值方法,是一个最优化算法,通常也称为最速下降法。梯度下降法的计算过程就是沿梯度下降的方向求解极小值。针对目标函数f(α)的迭代公式为α=α+γf'(α),其中γ为迭代步长,f'(α)为梯度下降方向。但是梯度法的收敛速度是线性的,即其收敛速度较慢。对于迭代步长γ的选取也存在矛盾,若迭代步长过大则收敛性能不佳,若迭代步长过小则收敛速度太慢。
(3)牛顿迭代法:
牛顿迭代法是一种在实数域和复数域上近似求解方程的方法。多数方程不存在求根公式,因此求精确根非常困难甚至不可能,因此寻找方程的近似根显得特别重要。牛顿迭代法使用函数f(x)泰勒级数的前几项来寻找方程f(x)=0的根。牛顿迭代法具有三次方的收敛速度,收敛速度较快。就本问题而言,从图5中可以看出,目标函数二阶导数的符号并不是恒定的,即不是凸(凹)函数,不满足牛顿迭代法全局收敛的性质。但是可以采用数学处理使得二阶导数恒定为正,比如求绝对值,并且利用二阶导数的模值变化,构造出一种变步长的迭代算法,以提高迭代收敛速度。针对目标函数f(α)的迭代公式为
其中h为迭代步长,控制迭代速度和精度。
下面以搜索法为例,进行仿真实验来观察前面提到的目标函数图像及其一阶导数、二阶导数图像,并说明搜索法计算量与搜索精度的矛盾。仿真的远场信号是单频复正弦信号,噪声为服从零均值高斯分布的白噪声,动目标初始角度为10度,角速度0.01度/秒。仿真条件:阵元数为100,快拍数T=1000,步进量为0.01。
由图3,横坐标α为补偿量exp(-jpwαt)中的待求参数,目标函数的函数值在α=1时取得最大值。即α=0代表相位未补偿,α=1代表相位完全补偿。为达到对动目标角速度ω的准确估计,步进量取值须尽可能小,但计算量也随之增加。
由图4、5,可观察目标函数一阶导数、二阶导数图像,同样存在计算量与搜索精度的矛盾。
由前面的理论分析及仿真实验可知,搜索法在一定范围内可得到全局最优值,但弊端是存在计算量与搜索精度的矛盾,所以搜索法的计算时间较长。与搜索法相比,梯度下降法与牛顿迭代法的计算量较少,但得到的结果可能是局部最优值。
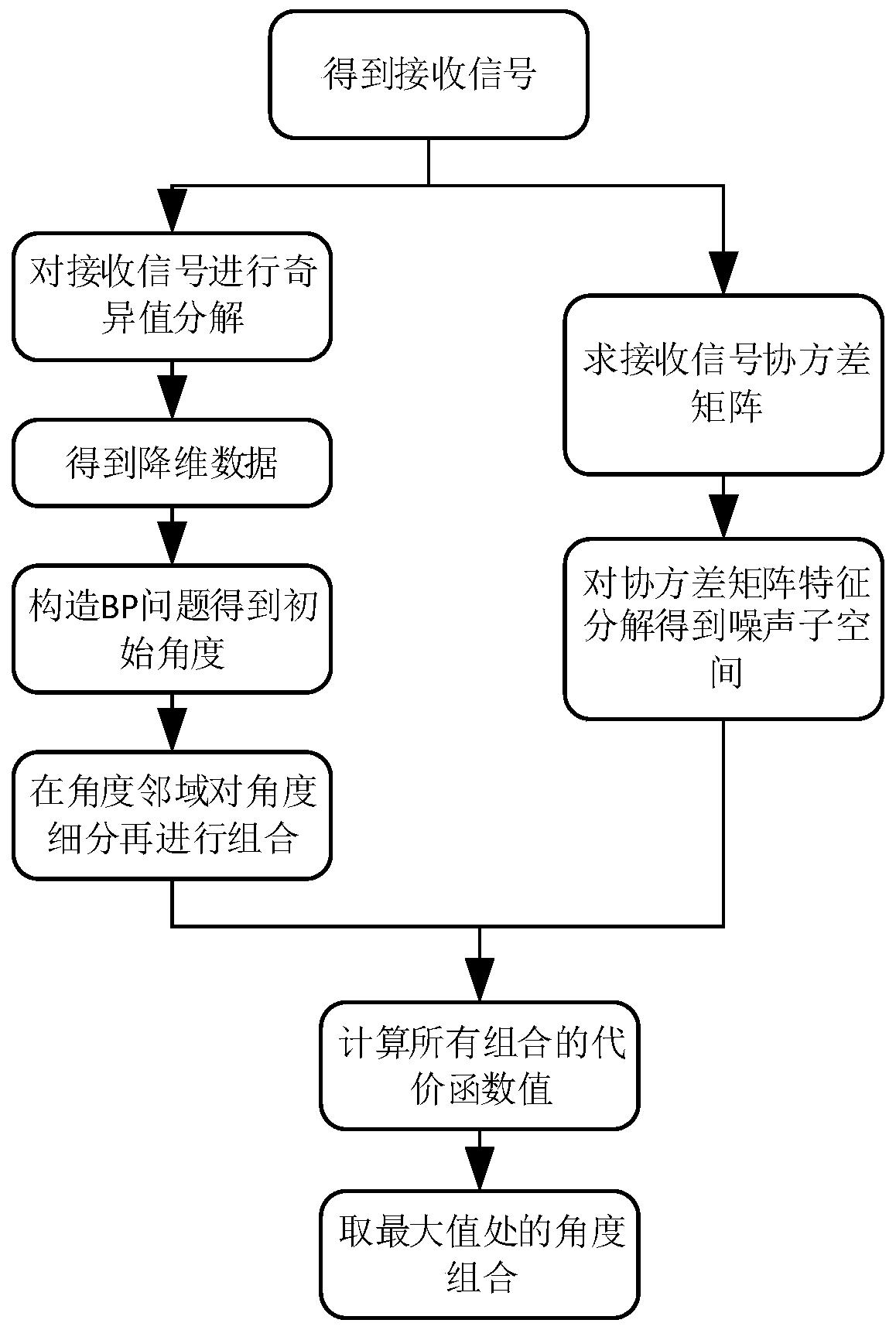
本发明针对基于DOA的无参考波形动目标跟踪研究中信号空间谱扩展的问题,提出了一种相位补偿的方法,能够实现将动目标扩展空间谱集聚为线谱。经过补偿的数据有助于相干积累以提升信噪比,实现动目标的DOA跟踪。图6为本发明的信号处理原理图。
本发明针对动目标的扩展空间谱,提出相位补偿的处理流程。对信号进行采样得到采样序列{ym(t)},其中m=1~M(M为阵元数),t表示采样时刻。快拍数为T。再对采样序列{ym(t)}各个快拍时刻t进行相位补偿,补偿量为exp(-jpwαt),其中α为待估参数,ω为动目标角速度。计算各个快拍时刻t在初始角度θ0处的总瞬时功率强度F(α|θ0),并以此作为目标函数。求解待估参数α有三种实现方法,分别为搜索法、梯度下降法、牛顿迭代法。
(1)搜索法的处理流程包括以下步骤:
步骤1:离散化待估参数α,设置搜索步进量,得到待估参数α的各个离散化网格点。
步骤2:计算各个离散网格点处目标函数F(α|θ0)的函数值。
步骤3:搜索目标函数的最大值,该离散网格点所对应的α即为搜索结果。
(2)梯度下降法的处理流程包括以下步骤:
步骤1:设置迭代初值α(初始补偿角速度),以及最大迭代次数。
步骤2:以α=α+γf'(α)为迭代公式,计算目标函数F(α|θ0)在各点的函数值。
步骤3:判断目标函数值,若函数值在某个数值附近来回震荡,则已经收敛;否则,转至步骤二进行下一次迭代。
(3)牛顿迭代法的处理流程包括以下步骤:
步骤1:设置迭代初值α(初始补偿角速度),以及最大迭代次数。
步骤2:以 为迭代公式,计算目标函数F(α|θ0)在各点的函数值。
步骤3:以 为收敛条件,判断是否收敛。若满足收敛条件,则以当前α作为所求点,终止计算;否则,转至步骤二进行下一次迭代。
以上处理步骤,假设初始角度θ0已知。在实际情况中,可以通过初始若干快拍数据采用MUSIC等空间谱算法对θ0进行估计。
本发明的有益效果是:解决了动目标空间谱扩展的问题,实现动目标DOA的跟踪。
附图说明
图1:均匀线阵示意图。
图2:动目标空间谱。
图3:目标函数图像。
图4:目标函数一阶导数图像。
图5:目标函数二阶导数图像。
图6:本发明原理图。
图7:目标积累效率。
图8:梯度下降法角速度补偿结果。
图9:梯度下降法目标函数迭代结果。
图10:梯度下降法目标函数一阶导数迭代结果。
图11:牛顿迭代法角速度补偿结果。
图12:牛顿迭代法目标函数迭代结果。
图13:牛顿迭代法目标函数一阶导数迭代结果。
图14:动目标积累信噪比图。
具体实施方式
下面结合实例详细说明本发明的技术方案。
实施例1:采取在时间上直接积累的方式,快拍数T=1000,采用表1给出信号的各仿真参数,比较静止目标与运动目标的积累效率。仿真参数设置如表1所示。
实验硬件平台为一台处理器为AMD A8-4500M APU with Radeon(tm)HD Graphics 2.50GHz、内存为4G的笔记本电脑,软件平台为WIN7操作系统,Matlab2012a。
表1仿真参数设置
由图7,说明静止目标的谱峰高度随着快拍数的增加而持续增长,与之相反,运动目标的谱峰高度先随着快拍数的增加逐渐变高,然后达到最大值,之后不再随着快拍数的增加而增长。
对于静止目标其空间谱始终是一根谱线,在时间上直接积累M个快拍,这M个快拍的信号相干,信噪比呈线性增长。对于运动目标空间谱扩展,在时间上直接积累M个快拍,但这M个快拍的信号非相干,信噪比增长有限。所以静止目标的谱峰高度会随着快拍数的增加而持续增长,相反运动目标的谱峰高度先随着快拍数的增加逐渐变高,之后不再随着快拍数增加而增长。
实施例2:在本实施例中使用的数据类型仍然是实施例1的数据类型,快拍数T=1000,仿真参数设置如表2所示。基于本发明提出的处理流程,比较梯度下降法与牛顿迭代法的迭代收敛情况,角速度补偿结果、目标函数迭代结果、目标函数一阶导数迭代结果,如图8~10、图11~13所示。
表2仿真参数设置
由图8、图11,当α=1时,目标运动导致的相位差得到完全补偿,即达到收敛。梯度下降法所用迭代次数为100次,牛顿迭代法的迭代次数为5次。可以看出两种方法的收敛情况存在较大差异,牛顿迭代法收敛速度明显优于梯度下降法。与图3比较,梯度下降法与牛顿迭代法的计算量也都小于搜索法。
实施例3:在进行实际的信号处理时,噪声存在较大随机性,为了进行仿真实验,在本实施例中使用零均值高斯分布随机数模拟每个快拍的接收采样噪声,快拍数T=1000。在本实施例中使用的数据类型仍然是实施例2的数据类型。信噪比变化范围-10dB~20dB,共计7个不同的输入信噪比SNRi。每个SNRi点进行了500次独立实验,计算各点对应输出信噪比SNRo的均方根误差(Root Mean Square Error,RMSE),比较在不同输入信噪比SNRi条件下信号回波输出信噪比SNRo的变化情况。动目标积累信噪比改善情况如图14所示,各点输出信噪比SNRo的具体数值大小如表3所示。
表3动目标积累后的输出信噪比
由图14,说明本发明基于相位补偿的动目标DOA对信噪比改善是显著的。各点的输出信噪比SNRo相较于输入信噪比SNRi信噪比都有20dB的提升。使用牛顿迭代法完成对动目标角速度ω的搜索,可对各个快拍时刻t进行完全相位补偿,经过相位补偿后的数据进行相参积累,可使信噪比获得较大提高。
总结起来,本发明提出的基于相位补偿的动目标DOA跟踪方法:首先需要已知动目标初始角度θ0,然后通过迭代运算完成对ω的一维搜索,然后对阵列接收数据进行相位补偿。从而实现数据的有效积累,提升信噪比,完成动目标DOA跟踪。
一种基于相位补偿的动目标DOA跟踪方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0