

IPC分类号 : G08C17/02I,G08B5/00I,B25J9/16I,H04N7/18I,H04B1/04I,H04W4/02I







专利摘要
本发明机器人技术领域,具体的说是一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,包括机器人、固定板和机爪;所述承物板上方放置有通讯装置,通讯装置内设有网络接口,网络接口通过Adhoc网络实时连接Corba中间件;所述二号电机的两个驱动轴均固连有转动轴,转动轴上均固连有信号发射装置;所述弧形板相对一侧侧面固连有刀刃;所述弧形板靠近机爪咬合外侧的表面固连有橡胶层;本发明网络接口通过Adhoc网络实时连接Corba中间件,实现机器人实时的无线通讯,通过Adhoc网络可实现机器人之间的信息和网络共享,提高信号覆盖距离,同时通过机器人搜救可有效避免人为搜救时的人员受伤。
权利要求
1.一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,包括机器人1、固定板2和机爪3;其特征在于:所述机器人1下方设有履带轮,方便机器人1于森林中行进;所述固定板2固连于机器人1上表面;所述固定板2上方设有承物板21;所述承物板21通过均匀布置的弹簧22固连于固定板2上表面;所述固定板2右侧上表面固连有固定座23;所述固定座23上铰接有摆动板24;所述摆动板24与固定座23之间固连有扭簧;所述承物板21下表面开设有限位滑槽;所述摆动板24上端滑动于限位滑槽内,使摆动板24上端始终与限位滑槽内,弹簧22位于摆动板24左侧,且弹簧22不均匀布置,从左至右密度依次递减;所述承物板21上方放置有通讯设置25,通讯设置25内设有网络接口,网络接口通过Adhoc网络实时连接Corba中间件,实现机器人1实时的无线通讯,并可通过中央处理器以及控制器将通讯系统内容以动作的方式反馈至机器人1上,实现远程对机器人1的操纵,同时通过Adhoc网络可实现机器人1之间的信息和网络共享,提高信号覆盖距离。
2.根据权利要求1所述的一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,其特征在于:所述承物板21上表面固连有一号电机26,一号电机26与控制器电连接;所述一号电机26的驱动轴固连有固定杆,固定杆上端固连有二号电机27,二号电机27为双轴电机;所述二号电机27的两个驱动轴均固连有转动轴,转动轴上均固连有信号发射装置28,可通过一号电机26和二号电机27控制信号发射装置28的发射方向;所述转动轴表面均固连有一号摄像头29。
3.根据权利要求1所述的一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,其特征在于:所述机爪3通过多个相互铰接的驱动杆连接于机器人1上,并通过多个液压缸驱动,液压缸与控制器电连接;所述机爪3由多个弧形板31通过螺栓连接而成,所述弧形板31背面宽面设计。
4.根据权利要求3所述的一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,其特征在于:所述弧形板31相对一侧侧面固连有刀刃32,且机爪3抓紧时可使相对设置的弧形板31交错;所述机爪3上通过螺钉固连有两个二号摄像头33。
5.根据权利要求4所述的一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,其特征在于:所述弧形板31靠近机爪3咬合外侧的表面固连有橡胶层34,实现机爪3的一爪多用。
6.根据权利要求5所述的一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统,其特征在于:所述橡胶层34内开设有气道,机器人1内设有气泵,气泵与控制器电连接,且气泵通过管道连通气道;所述橡胶层34表面开设有均匀布置的气孔35,气孔35连通气道。
说明书
技术领域
本发明机器人技术领域,具体的说是一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统。
背景技术
CORBA(Common Object Request Broker Architecture,公共对象请求代理体系结构,通用对象请求代理体系结构)是由OMG组织制订的一种标准的面向对象应用程序体系规范。或者说CORBA体系结构是对象管理组织(OMG)为解决分布式处理环境(DCE)中,硬件和软件系统的互连而提出的一种解决方案;OMG组织是一个国际性的非盈利组织,其职责是为应用开发提供一个公共框架,制订工业指南和对象管理规范,加快对象技术的发展。
Ad-Hoc(点对点)模式:ad-hoc模式就和以前的直连双绞线概念一样,是P2P的连接,所以也就无法与其它网络沟通了。一般无线终端设备像PMP、PSP、DMA等用的就是ad-hoc模式。在家庭无线局域网的组建,我想大家都知道最简单的莫过于两台安装有无线网卡的计算机实施无线互联,其中一台计算机连接Internet就可以共享带宽。
在进行森林搜救时,现有技术中,通常习惯将大量人员派入森林内进行地毯式搜救,但是,由于森林中信号覆盖差,人员往往无法深入深林深处太远,从而造成搜救进度慢,搜救效果差的问题,同时森林中危机四伏,也是制约人为搜救的一大困难;且人为搜救过程中常常出现被困人员安全救出后,大量搜救人员受伤,以及搜救人员失踪的现象,同时,现有技术中使用的搜救机器人由于森林信号覆盖较差,无法进行有效的通讯,导致搜救机器人无法深入太远,搜救效率低,同时大量搜救机器人遗失,造成过大的经济损失。
发明内容
为了弥补现有技术的不足,解决人为搜救时人员无法深入深林深处太远、搜救效率低、搜救人员受伤和失踪、机器人搜救过程中无法进行有效的信息共享和信号覆盖差,造成机器人遗失的问题,本发明提出的一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统。
本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统,包括机器人、固定板和机爪;所述固定板固连于机器人上表面;所述固定板上方设有承物板;所述承物板通过均匀布置的弹簧固连于固定板上表面;所述固定板右侧上表面固连有固定座;所述固定座上铰接有摆动板;所述摆动板与固定座之间固连有扭簧;所述摆动板上端滑动于限位滑槽内,使摆动板上端始终与限位滑槽内,弹簧位于摆动板左侧,且弹簧不均匀布置,从左至右密度依次递减;所述承物板上方放置有通讯设置,通讯设置内设有网络接口,网络接口通过Ad hoc网络实时连接Corba中间件,实现机器人实时的无线通讯,并可通过中央处理器以及控制器将通讯系统内容以动作的方式反馈至机器人上,实现远程对机器人的操纵;同时通过Ad hoc网络可实现机器人之间的信息共享,提高信号覆盖距离;工作时,由于森林路面凹凸不平,机器人行进过程中颠簸较为剧烈,可是通讯设置内零部件较多,无法承受较多的颠簸,容易导致零部件接触不良,从而影响通讯设置的正常使用,机器人前端瞬间抬起时,由于弹簧的不均匀布置,以及通讯设置自身重量较重,固定板随机器人瞬间抬起时,承物板具有摆动延迟,从而使摆动板逆时针摆动,从而降低固定板右端与承物板之间的距离,保持承物板水平,当机器人前端瞬间向下摆动时,固定板右端瞬间向下摆动,由于承物板的惯性延迟,使摆动板顺时针摆动,对承物板进行支撑,保证机器人在瞬间上下坡时,承物板保持水平,同时承物板向上震动时,摆动板顺时针摆动,抵住承物板,通过摆动板的摆动配合弹簧有效降低承物板的震动频率和幅度,从而防止通讯设置的故障,导致机器人无法寻回,造成损失的同时影响搜救进度。
优选的,所述承物板上表面固连有一号电机,一号电机与控制器电连接;所述一号电机的驱动轴固连有固定杆,固定杆上端固连有二号电机,二号电机为双轴电机;所述二号电机的两个驱动轴均固连有转动轴,转动轴上均固连有信号发射装置,可通过一号电机和二号电机控制信号发射装置的发射方向;所述转动轴表面均固连有一号摄像头;工作时,当机器人深入森林深处,无法对外部进行有效的通讯和机器人发生侧翻,定位系统无法准确定位时,控制器控制一号电机和二号电机旋转,使信号发射装置竖直向上,发送信号弹,方便搜救人员前往寻回机器人,同时信号发射装置可通过发射信号弹和照明弹的方式为失踪人员前往机器人位置,加快搜救速度,同时一号摄像头可通过一号电机和二号电机的旋转,实现全方位的监控。
优选的,所述机爪通过多个相互铰接的驱动杆连接于机器人上,并通过多个液压缸驱动,液压缸与控制器电连接;所述机爪由多个弧形板通过螺栓连接而成,所述弧形板背面宽面设计;工作时,当机器人遇到仅通过履带无法越过的障碍时,机爪张开,通过机爪背面协助机器人越过障碍物,同时机器人侧翻后,可通过机爪的支撑迅速恢复。
优选的,所述弧形板相对一侧侧面固连有刀刃;所述机爪上通过螺钉固连有两个二号摄像头;工作时,机器人行进过程中,由于信号发射装置位置较高,森林内藤蔓较多,容易缠绕于机器人表面,造成机器人无法正常工作,严重时造成机器人的损坏,通过弧形板的刀刃,可将藤蔓剪断,清除路面,方便机器人行进,同时机爪上的刀刃可对大型障碍物进行截断后搬离,同时可通过机爪探测沟壑类路障,防止机器人掉落至较深沟壑内。
优选的,所述弧形板靠近机爪咬合外侧的表面固连有橡胶层;工作时,当机器人发现森林中有人类遗留物时,可通过机爪抓起,用于判断失踪人员的大概位置,从而加快搜救进度,同时防止失踪人员的物品损失。
优选的,所述橡胶层内开设有气道,机器人内设有气泵,气泵与控制器电连接,且气泵通过管道连通气道;所述橡胶层表面开设有均匀布置的气孔,气孔连通气道;工作时,当橡胶层表面和刀刃表面附着泥土时,通过调整机爪的张合程度,调整气孔所吹位置,从而对刀刃和橡胶层进行清理,提高刀刃和橡胶层的使用寿命,同时可调整机爪使气孔对准地面,对地面落叶等进行清理,通过二号摄像头可对路面失踪人员留下脚印进行查看,从而加快搜救速度,降低搜救范围,同时落叶清理后更方便机器人的行进。
本发明的有益效果如下:
1.本发明所述的一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统,网络接口通过Ad hoc网络实时连接Corba中间件,实现机器人实时的无线通讯,并可通过中央处理器以及控制器将通讯系统内容以动作的方式反馈至机器人上,实现远程对机器人的操纵;同时通过Ad hoc网络可实现机器人之间的信息和网络共享,提高信号覆盖距离,同时通过机器人搜救可有效避免人为搜救时的人员受伤。
2.本发明所述的一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统,通过设置信号发射装置、一号电机和二号电机,通过控制器控制一号电机和二号电机旋转,使信号发射装置竖直向上,发送信号弹,方便搜救人员前往寻回机器人,同时信号发射装置可通过发射信号弹和照明弹的方式为失踪人员前往机器人位置,加快搜救速度。
3.本发明所述的一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统,通过设置机爪、和二号摄像头,通过机爪可有效对路面障碍物进行清理,同时机爪配合二号摄像头检测沟壑类路障,防止机器人掉入沟壑内,影响搜救效率。
附图说明
下面结合附图对本发明作进一步说明。
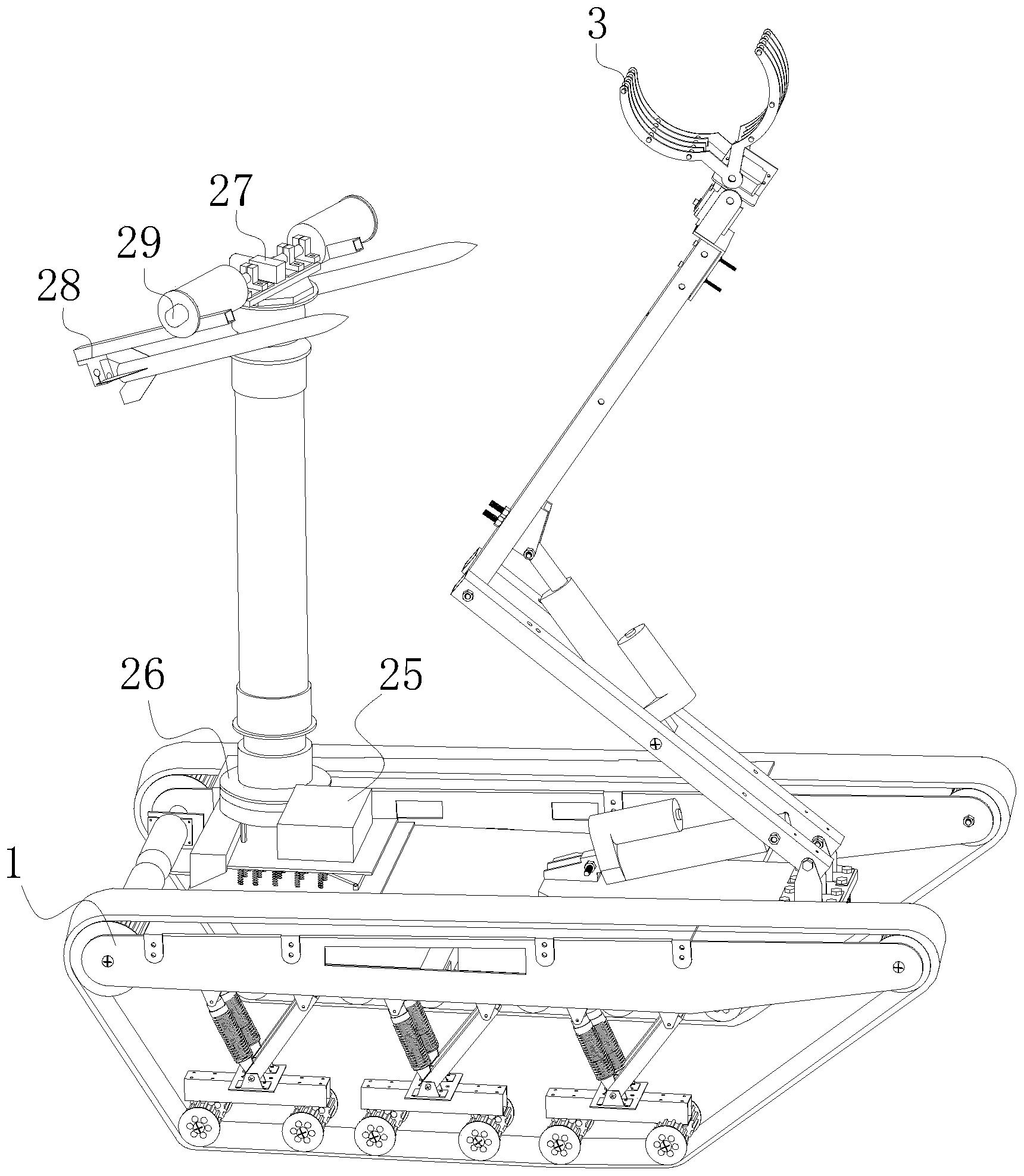
图1是本发明的立体图;
图2是通讯设置固定位置的剖视图;
图3是本发明机爪的立体图;
图4是图3中A处局部放大图;
图中:机器人1、固定板2、承物板21、弹簧22、固定座23、摆动板24、通讯设置 25、一号电机26、二号电机27、发射装置28、摄像头29、机爪3、弧形板31、刀刃32、二号摄像头33、橡胶层34、气孔35。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图4所示,本发明所述的一种基于Corba中间件技术与Ad hoc网络的机器人无线通讯系统,包括机器人1、固定板2和机爪3;所述固定板2固连于机器人1上表面;所述固定板2上方设有承物板21;所述承物板21通过均匀布置的弹簧22固连于固定板2上表面;所述固定板2右侧上表面固连有固定座23;所述固定座23上铰接有摆动板 24;所述摆动板24与固定座23之间固连有扭簧;所述摆动板24上端滑动于限位滑槽内,使摆动板24上端始终与限位滑槽内,弹簧22位于摆动板24左侧,且弹簧22不均匀布置,从左至右密度依次递减;所述承物板21上方放置有通讯设置25,通讯设置25内设有网络接口,网络接口通过Adhoc网络实时连接Corba中间件,实现机器人1实时的无线通讯,并可通过中央处理器以及控制器将通讯系统内容以动作的方式反馈至机器人1上,实现远程对机器人1的操纵;同时通过Ad hoc网络可实现机器人1之间的信息和网络共享,提高信号覆盖距离;工作时,由于森林路面凹凸不平,机器人1行进过程中颠簸较为剧烈,可是通讯设置25内零部件较多,无法承受较多的颠簸,容易导致零部件接触不良,从而影响通讯设置25的正常使用,机器人1前端瞬间抬起时,由于弹簧22的不均匀布置,以及通讯设置25自身重量较重,固定板2随机器人1瞬间抬起时,承物板21具有摆动延迟,从而使摆动板24逆时针摆动,从而降低固定板2右端与承物板21之间的距离,保持承物板21水平,当机器人1前端瞬间向下摆动时,固定板2右端瞬间向下摆动,由于承物板 21的惯性延迟,使摆动板24顺时针摆动,对承物板21进行支撑,保证机器人1在瞬间上下坡时,承物板21保持水平,同时承物板21向上震动时,摆动板24顺时针摆动,抵住承物板21,通过摆动板24的摆动配合弹簧22有效降低承物板21的震动频率和幅度,从而防止通讯设置25的故障,导致机器人1无法寻回,造成损失的同时影响搜救进度。
作为本发明的一种实施方式,所述承物板21上表面固连有一号电机26,一号电机26 与控制器电连接;所述一号电机26的驱动轴固连有固定杆,固定杆上端固连有二号电机27,二号电机27为双轴电机;所述二号电机27的两个驱动轴均固连有转动轴,转动轴上均固连有信号发射装置28,可通过一号电机26和二号电机27控制信号发射装置28的发射方向;所述转动轴表面均固连有一号摄像头29;工作时,当机器人1深入森林深处,无法对外部进行有效的通讯和机器人1发生侧翻,定位系统无法准确定位时,控制器控制一号电机26和二号电机27旋转,使信号发射装置28竖直向上,发送信号弹,方便搜救人员前往寻回机器人1,同时信号发射装置28可通过发射信号弹和照明弹的方式为失踪人员前往机器人1位置,加快搜救速度,同时一号摄像头29可通过一号电机26和二号电机27 的旋转,实现全方位的监控。
作为本发明的一种实施方式,所述机爪3通过多个相互铰接的驱动杆连接于机器人1 上,并通过多个液压缸驱动,液压缸与控制器电连接;所述机爪3由多个弧形板31通过螺栓连接而成,所述弧形板31背面宽面设计;工作时,当机器人1遇到仅通过履带无法越过的障碍时,机爪3张开,通过机爪3背面协助机器人1越过障碍物,同时机器人1侧翻后,可通过机爪3的支撑迅速恢复。
作为本发明的一种实施方式,所述弧形板31相对一侧侧面固连有刀刃32;所述机爪 3上通过螺钉固连有两个二号摄像头33;工作时,机器人1行进过程中,由于信号发射装置28位置较高,森林内藤蔓较多,容易缠绕于机器人1表面,造成机器人1无法正常工作,严重时造成机器人1的损坏,通过弧形板31的刀刃32,可将藤蔓剪断,清除路面,方便机器人1行进,同时机爪3上的刀刃32可对大型障碍物进行截断后搬离,同时可通过机爪3探测沟壑类路障,防止机器人1掉落至较深沟壑内。
作为本发明的一种实施方式,所述弧形板31靠近机爪3咬合外侧的表面固连有橡胶层34;工作时,当机器人1发现森林中有人类遗留物时,可通过机爪3抓起,用于判断失踪人员的大概位置,从而加快搜救进度,同时防止失踪人员的物品损失。
作为本发明的一种实施方式,所述橡胶层34内开设有气道,机器人1内设有气泵,气泵与控制器电连接,且气泵通过管道连通气道;所述橡胶层34表面开设有均匀布置的气孔35,气孔35连通气道;工作时,当橡胶层34表面和刀刃32表面附着泥土时,通过调整机爪3的张合程度,调整气孔35所吹位置,从而对刀刃32和橡胶层34进行清理,提高刀刃32和橡胶层34的使用寿命,同时可调整机爪3使气孔35对准地面,对地面落叶等进行清理,通过二号摄像头33可对路面失踪人员留下脚印进行查看,从而加快搜救速度,降低搜救范围,同时落叶清理后更方便机器人1的行进。
工作时,机器人1前端瞬间抬起时,由于弹簧22的不均匀布置,以及通讯设置25自身重量较重,固定板2随机器人1瞬间抬起时,承物板21具有摆动延迟,从而使摆动板 24逆时针摆动,从而降低固定板2右端与承物板21之间的距离,保持承物板21水平,当机器人1前端瞬间向下摆动时,固定板2右端瞬间向下摆动,由于承物板21的惯性延迟,使摆动板24顺时针摆动,对承物板21进行支撑,保证机器人1在瞬间上下坡时,承物板 21保持水平,同时承物板21向上震动时,摆动板24顺时针摆动,抵住承物板21,当机器人1深入森林深处,无法对外部进行有效的通讯和机器人1发生侧翻,定位系统无法准确定位时,控制器控制一号电机26和二号电机27旋转,使信号发射装置28竖直向上,发送信号弹,方便搜救人员前往寻回机器人1,同时信号发射装置28可通过发射信号弹和照明弹的方式为失踪人员前往机器人1位置,同时一号摄像头29可通过一号电机26和二号电机27的旋转,实现全方位的监控,当机器人1遇到仅通过履带无法越过的障碍时,机爪3张开,通过机爪3背面协助机器人1越过障碍物,同时机器人1侧翻后,可通过机爪3的支撑迅速恢复,同时可通过弧形板31的刀刃32,可将藤蔓剪断,同时机爪3上的刀刃32可对大型障碍物进行截断后搬离,同时可通过机爪3探测沟壑类路障,当机器人1 发现森林中有人类遗留物时,可通过机爪3抓起,用于判断失踪人员的大概位置,当橡胶层34表面和刀刃32表面附着泥土时,通过调整机爪3的张合程度,调整气孔35所吹位置。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
一种基于Corba中间件技术与Adhoc网络的机器人无线通讯系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0