









专利摘要
本发明公开了基于北斗定位通信单元的船载手持渔获信息采集装置。它由基于S3C2440的核心处理控制模块,基于DMT32240T035_01W的LCD显示与存储模块,4×5的矩阵扫描键盘模块,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块,Max3232串口电平转换模块,北斗信道切换模块接口组成。本发明能够渔获信息实时传送,渔获信息全面准确,数字化压缩,渔获种类采用彩色图文方式,以图认鱼,统一命名,解决地区间的命名差异,节约汇总时间;推广后信息采集的覆盖面广,同时应用成本较低。
权利要求
1.基于北斗定位通信单元的船载手持渔获信息采集装置,其特征在于,它由基于S3C2440的核心处理控制模块,基于DMT32240T035_01W的LCD显示与存储模块,4×5的矩阵扫描键盘模块,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块,Max3232串口电平转换模块,北斗信道切换模块接口组成;
基于S3C2440的核心处理控制模块的串口引脚分别与Max3232串口电平转换模块的引脚相连,基于S3C2440的核心处理控制模块的串口引脚与Max3232串口电平转换模块的引脚相连,Max3232串口电平转换模块的串口引脚与北斗信道切换模块接口中串口收发引脚相连,Max3232串口电平转换模块中的串口引脚与基于DMT32240T035_01W的LCD显示与存储模块中的串口收发引脚相连;4×5的矩阵扫描键盘模块与基于S3C2440的核心处理控制模块中的引脚相连,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块中的5V输出与基于DMT32240T035_01W的LCD显示与存储模块的电源输入相连,3.3V输出与基于S3C2440的核心处理控制模块、Max3232串口电平转换模块的电源输入相连;基于S3C2440的核心处理控制模块:为核心处理与控制模块,控制信道切换,并与各个模块进行信息的交互和处理;
Max3232串口电平转换模块:实现串口TTL电平和RS232电平的转换,使拥有TTL电平串口的核心处理控制模块可以与拥有RS232电平接口的北斗通信定位单元以及基于DMT32240T035_01W的LCD显示与存储模块进行通信;
基于LM2575HVT-5.0和LM1117-3.3的电源管理模块:为整个终端的各部分提供工作电源;
4X5的矩阵扫描键盘模块:实现各按键按下后电平的转变,并与核心处理控制模块一起,完成按键按下的识别;
北斗信道切换模块:完成信道切换工作;北斗定位通信单元可以进行北斗定位和收发北斗短报文,本装置和渔船已装备的北斗显控单元都需要利用北斗定位通信单元进行定位和收发短报文,北斗信道切换模块实现本装置和北斗显控单元分时切换,共享北斗定位通信单元的服务;
用户通过输入信息,传给基于S3C2440的核心处理控制模块处理后,通过Max3232串口电平转换模块与基于DMT32240T035_01W的LCD显示与存储模块通信,显示给用户;用户输入信息完毕后,基于S3C2440的核心处理控制模块通过接口控制信道切换,接着通过Max3232串口电平转换模块与北斗定位通信单元通信获取经纬度信息;基于S3C2440的核心处理控制模块将所有渔获的产量信息进行压缩,然后与其他信息一起进行编码,最后按照北斗短报文的格式打包,并经由Max3232串口电平转换模块将打包后的信息备份在基于DMT32240T035_01W的LCD显示与存储模块中;基于S3C2440的核心处理控制模块通过Max3232串口电平转换模块与北斗通信定位单元通信将信息发送至地面控制中心并进入等待状态;在一定的时间内,若中心有回复则完成本次渔获信息的采集发送,如果没有则从基于DMT32240T035_01W的LCD显示与存储模块中提取备份的信息重新发送并等待,直至收到回复后结束。
2.如权利要求1所述的基于北斗定位通信单元的船载手持渔获信息采集装置
的工作方法:
步骤一:接通电源开关,由北斗信道切换模块接口引入的24V电源被接通给基于LM2575HVT-5.0和LM1117-3.3的电源管理模块供电;通过基于LM2575HVT-5.0和LM1117-3.3的电源管理模块中的LM2575HVT-5.0变换成5V直流电源给基于DMT32240T035_01W的LCD显示与存储模块供电,同时5V直流电源在通过LM1117-3.3变成3.3V直流电源给基于S3C2440的核心处理控制模块、Max3232串口电平转换模块供电,供上电后,整个终端开始工作;
步骤二:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块读取4×5的矩阵扫描键盘模块中的渔船作业类型,依据其调取预先存储的与作业渔船相对应的鱼类图片索引;
步骤三:用户通过4×5的矩阵扫描键盘模块依次输入起网时间信息、工作时长等信息、步骤二获取的索引所指的各种鱼类的产量信息;基于S3C2440的核心处理控制模块处理4×5的矩阵扫描键盘模块的信息,并通过基于LM2575HVT-5.0和LM1117-3.3的电源管理模块发送至基于DMT32240T035_01W的LCD显示与存储模块进行显示;
步骤四:通过控制端口切换,获取北斗信道;通过基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块与北斗定位通信单元通信获取当前的经纬度信息;当前的经纬度是先向北斗定位通信单元发送GPS设置指令$GPSZ,然后解析收到的GPS信息指令$GPSX获得;
步骤五:基于S3C2440的核心处理控制模块将步骤三获取的产量信息进行下文基于索引的压缩编码方法进行压缩;
步骤六:基于S3C2440的核心处理控制模块读取4×5的矩阵扫描键盘模块中的终端号码信息,并将步骤五中的压缩编码信息、步骤三中的起网时间与工作时长信息、步骤四中的经纬度信息等进行组合;
步骤七:基于S3C2440的核心处理控制模块将步骤六生成的组合信息通过下文基于伪汉字编码技术进行伪汉字编码。
步骤八:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块读取基于DMT32240T035_01W的LCD显示与存储模块中存储的地面中心接收信息的北斗定位通信单元ID号码,并将之与步骤七生成的信息一起按发送北斗短报文格式进行数据打包,然后将打包后的信息存储在基于DMT32240T035_01W的LCD显示与存储模块中。
步骤九:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块发送步骤八中打包好的内容,倒计时等待中心回复,若收到回复则停止到计时,若倒计时到零则由3中提取存储的内容并切换信道重新发送。
说明书
技术领域:
本发明涉及的是基于北斗定位通信单元的船载手持渔获信息采集装置。
背景技术:
当前,渔船的渔获信息主要通过专门航次或者渔船靠岸卖鱼时现场手工调查采集。以上渔获信息采集方式有以下缺点:(1)渔获信息不能实时传输。只有等渔船作业完毕回港后才能获取回传;(2)渔获信息采集的广度有限且成本较高。专门航次覆盖范围有限,成本高昂,渔港调查需要调查人员到各地的码头现场,渔获信息采集的广度受调查人员数量的限制,调查成本也较高;(3)采集的信息不够准确全面。渔民一般能提供渔获的产量信息,但对于捕获的精确位置、工作时长等信息不能提供或提供不准确。(4)渔获信息不能自动数字化。现场采集的渔获信息一般需要人工汇总并手工输入电脑,工作量大且繁琐。(5)渔获信息不规范。就广东、广西、海南三省出海作业的渔民为例,同一种鱼,叫法差异很大,现场调查后需要花大量人工进行规范。
发明内容:
本发明的目的在于克服现有技术的不足,提供基于北斗定位通信单元的船载手持渔获信息采集装置。
为了解决背景技术所存在的问题,本发明采用以下技术方案:
基于北斗定位通信单元的船载手持渔获信息采集装置,它由基于S3C2440的核心处理控制模块,基于DMT32240T035_01W的LCD显示与存储模块,4×5的矩阵扫描键盘模块,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块,Max3232串口电平转换模块,北斗信道切换模块接口组成;
基于S3C2440的核心处理控制模块的串口引脚分别与Max3232串口电平转换模块的引脚相连,基于S3C2440的核心处理控制模块的串口引脚与Max3232串口电平转换模块的引脚相连,Max3232串口电平转换模块的串口引脚与北斗信道切换模块接口中串口收发引脚相连,Max3232串口电平转换模块中的串口引脚与基于DMT32240T035_01W的LCD显示与存储模块中的串口收发引脚相连;4×5的矩阵扫描键盘模块与基于S3C2440的核心处理控制模块中的引脚相连,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块中的5V输出与基于DMT32240T035_01W的LCD显示与存储模块的电源输入相连,3.3V输出与基于S3C2440的核心处理控制模块、Max3232串口电平转换模块的电源输入相连;
基于S3C2440的核心处理控制模块:为核心处理与控制模块,控制信道切换,并与各个模块进行信息的交互和处理;
Max3232串口电平转换模块:实现串口TTL电平和RS232电平的转换,使拥有TTL电平串口的核心处理控制模块可以与拥有RS232电平接口的北斗通信定位单元以及基于DMT32240T035_01W的LCD显示与存储模块进行通信;
基于LM2575HVT-5.0和LM1117-3.3的电源管理模块:为整个终端的各部分提供工作电源;
4X5的矩阵扫描键盘模块:实现各按键按下后电平的转变,并与核心处理控制模块一起,完成按键按下的识别;
北斗信道切换模块:完成信道切换工作;北斗定位通信单元可以进行北斗定位和收发北斗短报文,本装置和渔船已装备的北斗显控单元都需要利用北斗定位通信单元进行定位和收发短报文,北斗信道切换模块实现本装置和北斗显控单元分时切换,共享北斗定位通信单元的服务。
用户通过输入信息,传给基于S3C2440的核心处理控制模块处理后,通过Max3232串口电平转换模块与基于DMT32240T035_01W的LCD显示与存储模块通信,显示给用户;用户输入信息完毕后,基于S3C2440的核心处理控制模块通过接口控制信道切换,接着通过Max3232串口电平转换模块与北斗定位通信单元通信获取经纬度信息;基于S3C2440的核心处理控制模块将所有渔获的产量信息进行压缩,然后与其他信息一起进行编码,最后按照北斗短报文的格式打包,并经由Max3232串口电平转换模块将打包后的信息备份在基于DMT32240T035_01W的LCD显示与存储模块中;基于S3C2440的核心处理控制模块通过Max3232串口电平转换模块与北斗通信定位单元通信将信息发送至地面控制中心并进入等待状态;在一定的时间内,若中心有回复则完成本次渔获信息的采集发送,如果没有则从基于DMT32240T035_01W的LCD显示与存储模块中提取备份的信息重新发送并等待,直至收到回复后结束。
所述的基于北斗定位通信单元的船载手持渔获信息采集装置的工作方法:
步骤一:接通电源开关,由北斗信道切换模块接口引入的24V电源被接通给基于LM2575HVT-5.0和LM1117-3.3的电源管理模块供电;通过基于LM2575HVT-5.0和LM1117-3.3的电源管理模块中的LM2575HVT-5.0变换成5V直流电源给基于DMT32240T035_01W的LCD显示与存储模块供电,同时5V直流电源在通过LM1117-3.3变成3.3V直流电源给基于S3C2440的核心处理控制模块、Max3232串口电平转换模块供电,供上电后,整个终端开始工作;
步骤二:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块读取4×5的矩阵扫描键盘模块中的渔船作业类型,依据其调取预先存储的与作业渔船相对应的鱼类图片索引;
步骤三:用户通过4×5的矩阵扫描键盘模块依次输入起网时间信息、工作时长等信息、步骤二获取的索引所指的各种鱼类的产量信息;基于S3C2440的核心处理控制模块处理4×5的矩阵扫描键盘模块的信息,并通过基于LM2575HVT-5.0和LM1117-3.3的电源管理模块发送至基于DMT32240T035_01W的LCD显示与存储模块进行显示;
步骤四:通过控制端口切换,获取北斗信道;通过基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块与北斗定位通信单元通信获取当前的经纬度信息;当前的经纬度是先向北斗定位通信单元发送GPS设置指令$GPSZ,然后解析收到的GPS信息指令$GPSX获得。
步骤五:基于S3C2440的核心处理控制模块将步骤三获取的产量信息进行下文基于索引的压缩编码方法进行压缩;
步骤六:基于S3C2440的核心处理控制模块读取4×5的矩阵扫描键盘模块中的终端号码信息,并将步骤五中的压缩编码信息、步骤三中的起网时间与工作时长信息、步骤四中的经纬度信息等进行组合。
步骤七:基于S3C2440的核心处理控制模块将步骤六生成的组合信息通过下文基于伪汉字编码技术进行伪汉字编码。
步骤八:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块读取基于DMT32240T035_01W的LCD显示与存储模块中存储的地面中心接收信息的北斗定位通信单元ID号码,并将之与步骤七生成的信息一起按发送北斗短报文格式进行数据打包,然后将打包后的信息存储在基于DMT32240T035_01W的LCD显示与存储模块中。
步骤九:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块发送步骤八中打包好的内容,倒计时等待中心回复,若收到回复则停止到计时,若倒计时到零则由3中提取存储的内容并切换信道重新发送。
本发明对比现有技术有如下的有益效果:本发明能够渔获信息实时传送,渔获信息全面准确,数字化压缩,渔获种类采用彩色图文方式,以图认鱼,统一命名,解决地区间的命名差异,节约汇总时间;推广后信息采集的覆盖面广,同时应用成本较低。
附图说明:
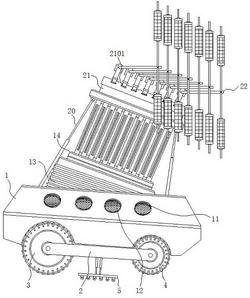
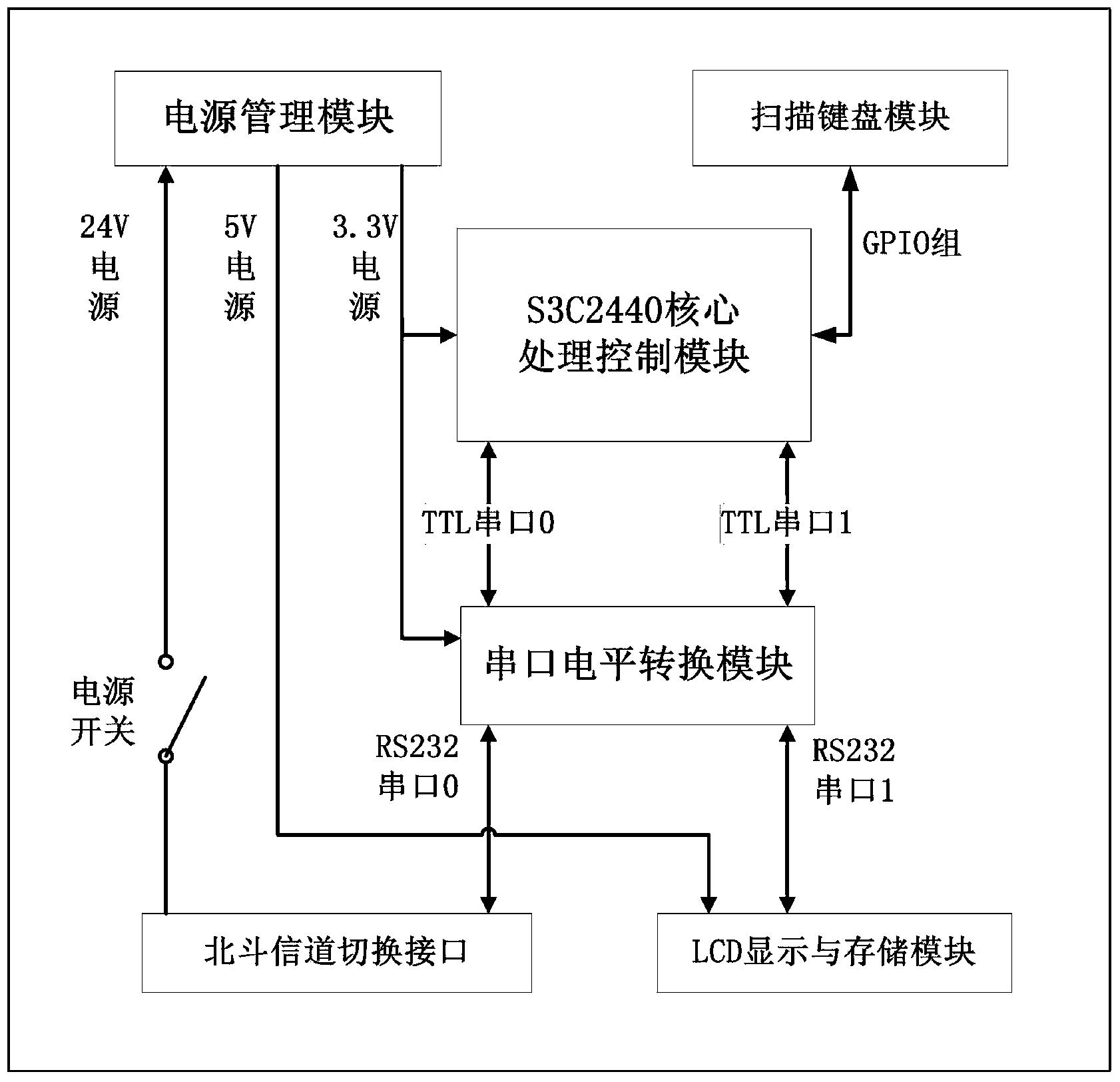
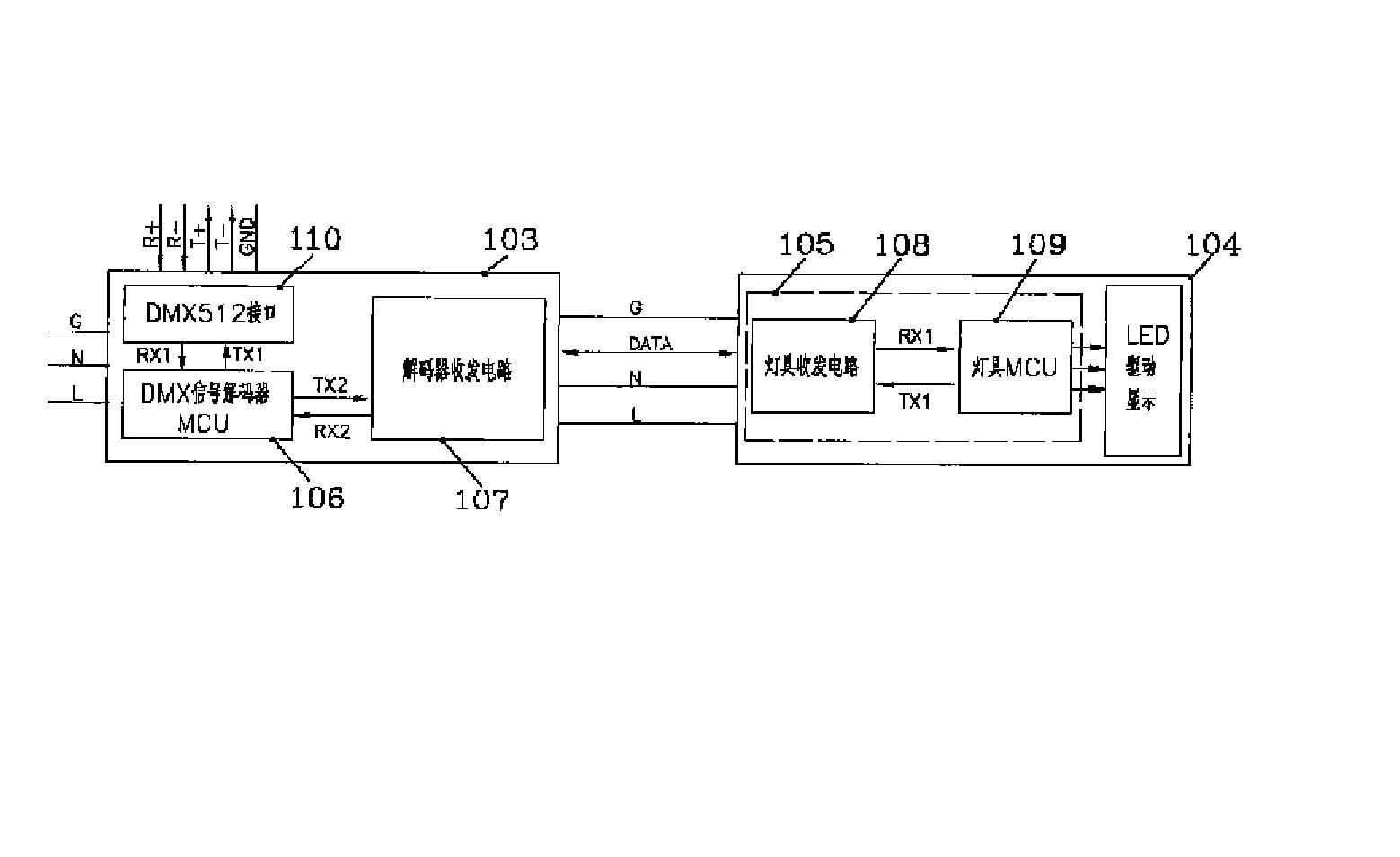
图1为本发明的组成结构图。
图2为5V直流电源产生电路原理图。
图3为3.3V直流电源产生电路原理图。
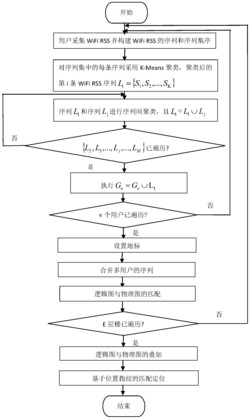
图4为基于索引的压缩编码原理图。
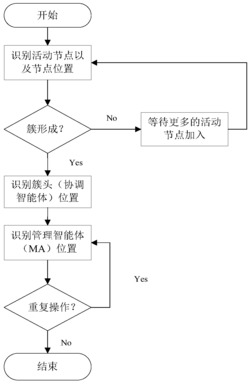
图5为伪汉字编码原理图。
图6为船载渔获信息采装置连接示意图。
图7为信道复用切换模块硬件结构图。
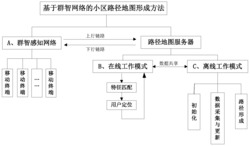
图8为本发明装置软件系统层次图。
具体实施方式:
下面结合附图和具体实施方式对本发明作进一步描述:
图1为本发明的组成结构图。基于北斗定位通信单元的船载手持渔获信息采集装置,它由基于S3C2440的核心处理控制模块,基于DMT32240T035_01W的LCD显示与存储模块,4×5的矩阵扫描键盘模块,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块,Max3232串口电平转换模块,北斗信道切换模块接口组成。基于S3C2440的核心处理控制模块的串口引脚分别与Max3232串口电平转换模块的引脚相连,基于S3C2440的核心处理控制模块的串口引脚与Max3232串口电平转换模块的引脚相连,Max3232串口电平转换模块的串口引脚与北斗信道切换模块接口中串口收发引脚相连,Max3232串口电平转换模块中的串口引脚与基于DMT32240T035_01W的LCD显示与存储模块中的串口收发引脚相连;4×5的矩阵扫描键盘模块与基于S3C2440的核心处理控制模块中的引脚相连,基于LM2575HVT-5.0和LM1117-3.3的电源管理模块中的5V输出与基于DMT32240T035_01W的LCD显示与存储模块的电源输入相连,3.3V输出与基于S3C2440的核心处理控制模块、Max3232串口电平转换模块的电源输入相连;
基于S3C2440的核心处理控制模块:为核心处理与控制模块;
Max3232串口电平转换模块:实现串口TTL电平和RS232电平的转换
基于LM2575HVT-5.0和LM1117-3.3的电源管理模块:为整个终端提供工作电源,其中5V直流电源提供给基于DMT32240T035_01W的LCD显示与存储模块,3.3V直流电源提供给基于S3C2440的核心处理控制模块、Max3232串口电平转换模块;
用户通过输入信息,传给基于S3C2440的核心处理控制模块处理后,通过Max3232串口电平转换模块与基于DMT32240T035_01W的LCD显示与存储模块通信,显示给用户;用户输入信息完毕后,基于S3C2440的核心处理控制模块通过接口控制信道切换,接着通过Max3232串口电平转换模块与北斗定位通信单元通信获取经纬度信息;基于S3C2440的核心处理控制模块将所有渔获的产量信息进行压缩,然后与其他信息一起进行编码,最后按照北斗短报文的格式打包,并经由Max3232串口电平转换模块将打包后的信息备份在基于DMT32240T035_01W的LCD显示与存储模块中;基于S3C2440的核心处理控制模块通过Max3232串口电平转换模块与北斗通信定位单元通信将信息发送至地面控制中心并进入等待状态;在一定的时间内,若中心有回复则完成本次渔获信息的采集发送,如果没有则从基于DMT32240T035_01W的LCD显示与存储模块中提取备份的信息重新发送并等待,直至收到回复后结束。
本装置所采集的渔业信息由以下部分定义并组成:
a.起网时间,即渔民起网时的时间;b.工作时长,即渔民从下网到起网之间的时间间隔长度;c.渔船作业类型(包括但不限于拖网渔船、围网渔船、刺网渔船、灯光罩网渔船)编号;d.渔获采集终端编号,即每个渔获采集终端唯一的ID号;e.发送消息时的经纬度;
初次使用前先开机初始化,输入三种信息:渔船的作业类型,渔获信息终端编号、地面中心用于接收信息的北斗定位通信单元ID号码,输入完保存在基于DMT32240T035_01W的LCD显示与存储模块中。
基于北斗定位通信单元的船载手持渔获信息采集装置的工作方法:
步骤一:接通电源开关,由北斗信道切换模块接口引入的24V电源被接通给基于LM2575HVT-5.0和LM1117-3.3的电源管理模块供电;通过基于LM2575HVT-5.0和LM1117-3.3的电源管理模块中的LM2575HVT-5.0变换成5V直流电源给基于DMT32240T035_01W的LCD显示与存储模块供电,同时5V直流电源在通过LM1117-3.3变成3.3V直流电源给基于S3C2440的核心处理控制模块、Max3232串口电平转换模块供电,供上电后,整个终端开始工作;
图2为5V直流电源产生电路原理图。LM2575HVT-5.0是一直流—直流的开关稳压集成电路,1脚为高压输入(最高为63V),2脚为5V输出(最大输出1安培),4脚为反馈输入,将输出的5V电压反馈回芯片,调整电路,使输出稳定。
图3为3.3V直流电源产生电路原理图。LM1117-3.3是线性直流——直流稳压电路,3号引脚为5V输入,2、4好引脚为3.3V直流输出(最大输出电流0.8安培)。输入、输出端的100nF电容用来滤除高频干扰,100uF电容用来滤除低频干扰。
步骤二:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块读取4×5的矩阵扫描键盘模块中的渔船作业类型,依据其调取预先存储的与作业渔船相对应的鱼类图片索引;
步骤三:用户通过4×5的矩阵扫描键盘模块依次输入起网时间信息、工作时长等信息、步骤二获取的索引所指的各种鱼类的产量信息;基于S3C2440的核心处理控制模块处理4×5的矩阵扫描键盘模块的信息,并通过基于LM2575HVT-5.0和LM1117-3.3的电源管理模块发送至基于DMT32240T035_01W的LCD显示与存储模块进行显示;
步骤四:通过控制端口切换,获取北斗信道;通过基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块与北斗定位通信单元通信获取当前的经纬度信息;当前的经纬度是先向北斗定位通信单元发送GPS设置指令$GPSZ,然后解析收到的GPS信息指令$GPSX获得。
步骤五:基于S3C2440的核心处理控制模块将步骤三获取的产量信息进行下文基于索引的压缩编码方法进行压缩;
图4为基于索引的压缩编码原理图。本发明装置提供30中鱼类及其他杂鱼给用户选择并输入产量,共需64字节数据表示。一般情况下,一次捕捞最多有十余种鱼类,大多数产量为零。因此加入8字节的索引共64位,索引中的每一位与64个字节数据一一对应。对应数据为零,则索引中对应位为0,数据非零,则索引中对应位为1。若64字节数据中有N(0《N《64)个字节非零,则压缩前后字节数比为64:(N+8)。
解码时,进行上述过程的逆操作即可。
本装置中是对64个字节采用了基于8字节索引的压缩编码方法,但本压缩编码方法具有普遍性,可以但不限于对64个字节数据进行压缩。极端情况下,对2个字节的数据,如2个零字节数据即可产生压缩效果。
步骤六:基于S3C2440的核心处理控制模块读取4×5的矩阵扫描键盘模块中的终端号码信息,并将步骤五中的压缩编码信息、步骤三中的起网时间与工作时长信息、步骤四中的经纬度信息等进行组合。
步骤七:基于S3C2440的核心处理控制模块将步骤六生成的组合信息通过下文基于伪汉字编码技术进行伪汉字编码。
图5为伪汉字编码原理图。GB2312中每个汉字由2个字节组成,第一个字节的范围为176-247,第二个字节的范围为160-254。北斗通信导航系统的短报文对符合GB2312编码的数据传输成功率很高,而非GB2312码的数据传输成功率较低,因此对信息进行了为伪汉字编码,编码过程如下:
首先将原始数据以三个字节为一组进行分组,最后剩余不足三个字节的以零补足。
接着将每组8比特的三个字节以6比特的单位顺序分割,分割后在每个6比特的单位前以2位零补足,变成4个字节,每个字节表示的数值范围为0~63;
最后将将上一步获得的4个字节分别加上176,使之都落在176~239的范围内,系统会把这四个字节识别成2个汉字,完成GB2312字域的映射。
步骤八:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块读取基于DMT32240T035_01W的LCD显示与存储模块中存储的地面中心接收信息的北斗定位通信单元ID号码,并将之与步骤七生成的信息一起按发送北斗短报文格式进行数据打包,然后将打包后的信息存储在基于DMT32240T035_01W的LCD显示与存储模块中。
步骤九:基于S3C2440的核心处理控制模块经由Max3232串口电平转换模块发送步骤八中打包好的内容,倒计时等待中心回复,若收到回复则停止到计时,若倒计时到零则由3中提取存储的内容并切换信道重新发送。
本发明装置需配合船上已经安装的北斗船载终端使用,他们的连接关系如下图6,图6为船载渔获信息采装置连接示意图。鉴于渔船上大多都由渔政部门强制配备了北斗船载终端(包括北斗定位单元和彩屏显控单元及附件),为了降低本终端的使用成本,船载渔获采集终端利用信道复用切换模块,与彩屏显控单元分时复用北斗定位通信单元。平时北斗定位通信单元为彩屏显控单元服务,只在发送渔获信息时,渔获信息采集终端控制信道复用切换模块将北斗定位通信单元的北斗信道切换至Max3232串口电平转换模块的串口1上,为己服务,发送成功后再及交还给彩屏控制单元。
图7为信道复用切换模块硬件结构图。信道复用切换模块用于北斗信道的切换,使得本装置无需另购昂贵的北斗定位通信单元,其内部结构图如图7。其中RXD_T和TXD_T分别表示RS232电平的北斗定位通信单元的数据收发信号;RXD_K和TXD_K表示彩屏显控单元的RS232数据收发信号;RXD_C和TXD_C表示渔获信息采集终端的数据收发信号。光耦控制信号有三根,分别控制串口通信所用的三根信号:接收信号、发送信号、地信号。为了提高使用可靠性,信号复用切换模块在设计上采用了回馈电源模式,即当渔获信息采集终端断电时,切换电路也断电,切换继电器处于断电默认状态(北斗定位通信单元默认和彩屏显控单元连接),不受渔获信息采集终端的控制。
图8为本发明装置软件系统层次图。为了实现本终端功能灵活扩展,方便维护,本终端的嵌入式软件采用面向对象的编程方法。应用程序是由窗口(Window)组成的,窗口只包含控件(Controller),控件为窗口提供各种服务。设备层分为虚拟设备和实设备,虚拟设备是对嵌入式应用中各种设备的一种抽象,相当于一个接口,它与具体设备无关;实设备是实实在在的设备,它与具体的芯片、具体的硬件相关,如图8所示。
控件一方面为应用层服务,一方面又要靠设备的支撑。将设备分为虚设备和实设备,在设备层实现了接口和实现的分离。通过控件层,又使得应用层和设备层相分离。两个分离解决了嵌入式软件开发中常见的强耦合,动一发则牵全身的缺点。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
基于北斗定位通信单元的船载手持渔获信息采集装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0