

IPC分类号 : G08C17/02,G08C23/00,H04W84/18,E21F11/00,E21F17/18








专利摘要
本发明公开了一种基于无线通信传播特性井下救援机器人通讯节点布放方法,包括步骤:一、获取地理信息,采集井下巷道地形参数;二、判断井下巷道壁是否有堆积障碍;三、判断煤矿救援机器人是否可以通过井下巷道壁堆积障碍;四、判断井下巷道壁堆积障碍是否为单侧巷道壁堆积障碍;五、煤矿救援机器人返回起点;六、单侧巷道壁堆积障碍下通讯节点的布放;七、双侧巷道壁堆积障碍下通讯节点的布放;八、多次循环步骤二至步骤七,直至完成井下通讯节点的布放过程。本发明设计新颖,通过煤矿救援机器人识别井下现场环境,实时探测井下通信信号强度,自主布放通讯节点,建立优化的无线网络环境,有效解决复杂环境中数据传输的问题。
权利要求
1.基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于该方法包括以下步骤:
步骤一、获取地理信息,采集井下巷道地形参数:采用煤矿救援机器人获取井下巷道地形参数及地理信息;
所述煤矿救援机器人上安装有用于采集巷道环境参数的环境探测器(1)和用于探测井下巷道地形障碍物的激光探测仪(2),环境探测器(1)的信号输出端和激光探测仪(2)的信号输出端均与煤矿救援机器人中央处理器(3)的输入端连接,煤矿救援机器人中央处理器(3)的输出端接有用于控制所述煤矿救援机器人前进或后退的行走机构(7);
步骤二、判断井下巷道壁是否有堆积障碍:采用激光探测仪(2)沿所述煤矿救援机器人前进方向探测井下巷道壁堆积障碍,当激光探测仪(2)探测到井下巷道壁有堆积障碍时,执行步骤三;当激光探测仪(2)探测井下巷道壁无堆积障碍时,采用与煤矿救援机器人中央处理器(3)相接的无线通信模块(6)实时采集井下通信信号强度,所述煤矿救援机器人根据井下通信信号强度在巷道内实时布放通讯节点(5);
步骤三、判断煤矿救援机器人是否可以通过井下巷道壁堆积障碍:根据步骤二中激光探测仪(2)探测的井下巷道壁堆积障碍高度及范围判断煤矿救援机器人是否可以通行,当激光探测仪(2)发出的探测信号部分被反射接收时,说明煤矿救援机器人可以通过井下巷道壁堆积障碍,执行步骤四;当激光探测仪(2)发出的探测信号全部被反射接收时,说明煤矿救援机器人无法通过井下巷道壁堆积障碍,执行步骤五;
步骤四、判断井下巷道壁堆积障碍是否为单侧巷道壁堆积障碍:采用激光探测仪(2)探测井下巷道壁堆积障碍的高度及范围,并将探测结果送入煤矿救援机器人中央处理器(3)进行分析处理,煤矿救援机器人中央处理器(3)判断井下巷道壁堆积障碍为单侧巷道壁堆积障碍时,执行步骤六;否则,执行步骤七;
步骤五、煤矿救援机器人返回起点:采用煤矿救援机器人中央处理器(3)控制行走机构(7)沿原路返回至起点;
步骤六、单侧巷道壁堆积障碍下通讯节点的布放,过程如下:
步骤601、建立单侧巷道壁堆积障碍空间坐标系O
步骤602、根据公式
步骤603、根据公式
步骤604、判断当前环境下无线通信模块是否可以通信:当公式f
步骤605、单侧巷道壁堆积障碍下通讯节点布放区域划分并计算对应区域的无线电磁波衰减系数α
步骤606、完成单侧巷道壁堆积障碍下通讯节点的布放:通过环境探测器(1)实时探测通讯节点(5)的安全布放位置,当单侧巷道壁堆积障碍下只存在障碍区域I时,优先考虑将通讯节点(5)布放在该障碍区域I中a
当单侧巷道壁堆积障碍下存在障碍区域I和无障碍区域II时,优先考虑将通讯节点(5)布放在无障碍区域II,若环境探测器(1)探测无障碍区域II中无法安装通讯节点(5)时,考虑将通讯节点(5)布放在该情况下的障碍区域I,在该情况下的障碍区域I中,优先考虑将通讯节点(5)布放在该情况下的障碍区域I中a
步骤七、双侧巷道壁堆积障碍下通讯节点的布放,过程如下:
步骤701、建立双侧巷道壁堆积障碍空间坐标系O
步骤702、根据公式
步骤703、根据公式
步骤704、判断当前环境下无线通信模块是否可以通信:当公式f'
步骤705、双侧巷道壁堆积障碍下通讯节点布放区域划分并计算对应区域的无线电磁波衰减系数α
步骤706、完成双侧巷道壁堆积障碍下通讯节点的布放:通过环境探测器(1)实时探测通讯节点(5)的安全布放位置,当双侧巷道壁堆积障碍下只存在障碍区域I'时,优先考虑将通讯节点(5)布放在该障碍区域I'中a'
当双侧巷道壁堆积障碍下存在障碍区域I'和无障碍区域II'时,优先考虑将通讯节点(5)布放在无障碍区域II',若环境探测器(1)探测无障碍区域II'中无法安装通讯节点(5)时,考虑将通讯节点(5)布放在该情况下的障碍区域I',在该情况下的障碍区域I'中,优先考虑将通讯节点(5)布放在该情况下的障碍区域I'中a'
步骤八、多次循环步骤二至步骤七,直至完成井下通讯节点的布放过程。
2.按照权利要求1所述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤一中环境探测器(1)包括温度传感器、湿度传感器和惯性传感器。
3.按照权利要求1所述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤二中通讯节点(5)为无线中继器。
4.按照权利要求1所述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤二中无线通信模块(6)为WIFI无线通信模块。
5.按照权利要求1所述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤601中建立的单侧巷道壁堆积障碍空间坐标系O
6.按照权利要求1所述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤701中建立的双侧巷道壁堆积障碍空间坐标系O
说明书
技术领域
本发明属于井下通讯节点布放技术领域,具体涉及一种基于无线通信传播特性井下救援机器人通讯节点布放方法。
背景技术
煤矿井下通信系统是保障煤炭生产正常运行的重要前提,也是煤矿事故发生后,煤矿救援人员、煤矿救援机器人等开展救援工作的重要保证。煤矿事故发生后,通信系统遭到破坏,无法正常使用,给救援工作带来极大的阻碍。目前,针对矿用无线通信技术在多变的地理环境中传输特性的研究相对薄弱,尤其是没有细致的分析和研究煤矿救援工作中的无线通信节点布放问题,导致救援过程中应急通信节点无法准确合理的放置,更无法发挥出无线通信技术在煤矿救援人员、救援机器人等之间的作用。目前,针对煤矿巷道中无线通信网络信道的研究,大多集中在空直巷道中无线电磁波传播特性的探索,而在复杂环境下的无线通信系统信道特性的研究非常少,可借鉴的无线信道特性理论主要是空直巷道或者理想环境下的研究成果,对于无线通信系统在复杂环境中传输特性的研究仍需要深入研究。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于无线通信传播特性井下救援机器人通讯节点布放方法,通过煤矿救援机器人识别井下现场环境,实时探测井下通信信号强度,自主布放通讯节点,建立优化的无线网络环境,有效解决复杂环境中煤矿救援人员、救援机器人等之间数据传输的问题,便于推广使用。
为解决上述技术问题,本发明采用的技术方案是:基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于该方法包括以下步骤:
步骤一、获取地理信息采集井下巷道地形参数:采用煤矿救援机器人获取井下巷道地形参数及地理信息;
所述煤矿救援机器人上安装有用于采集巷道环境参数的环境探测器和用于探测井下巷道地形障碍物的激光探测仪,环境探测器的信号输出端和激光探测仪的信号输出端均与煤矿救援机器人中央处理器的输入端连接,煤矿救援机器人中央处理器的输出端接有用于控制所述煤矿救援机器人前进或后退的行走机构;
步骤二、判断井下巷道壁是否有堆积障碍:采用激光探测仪沿所述煤矿救援机器人前进方向探测井下巷道壁堆积障碍,当激光探测仪探测到井下巷道壁有堆积障碍时,执行步骤三;当激光探测仪探测井下巷道壁无堆积障碍时,采用与煤矿救援机器人中央处理器相接的无线通信模块实时采集井下通信信号强度,所述煤矿救援机器人根据井下通信信号强度在巷道内实时布放通讯节点;
步骤三、判断煤矿救援机器人是否可以通过井下巷道壁堆积障碍:根据步骤二中激光探测仪探测的井下巷道壁堆积障碍高度及范围判断煤矿救援机器人是否可以通行,当激光探测仪发出的探测信号部分被反射接收时,说明煤矿救援机器人可以通过井下巷道壁堆积障碍,执行步骤四;当激光探测仪发出的探测信号全部被反射接收时,说明煤矿救援机器人无法通过井下巷道壁堆积障碍,执行步骤五;
步骤四、判断井下巷道壁堆积障碍是否为单侧巷道壁堆积障碍:采用激光探测仪探测井下巷道壁堆积障碍的高度及范围,并将探测结果送入煤矿救援机器人中央处理器进行分析处理,煤矿救援机器人中央处理器判断井下巷道壁堆积障碍为单侧巷道壁堆积障碍时,执行步骤六;否则,执行步骤七;
步骤五、煤矿救援机器人返回起点:采用煤矿救援机器人中央处理器控制行走机构沿原路返回至起点;
步骤六、单侧巷道壁堆积障碍下通讯节点的布放,过程如下:
步骤601、建立单侧巷道壁堆积障碍空间坐标系O1-x1y1z1;
步骤602、根据公式 计算单侧巷道壁堆积障碍空间截面面积S1,其中,a为巷道宽,b为巷道高,θ为障碍物坡面与步骤601中建立的坐标系O1-x1y1z1中的z1轴的夹角且θ满足:
步骤603、根据公式 计算当前环境下的截止频率fc,其中,c为真空中光速,m为激光探测仪与巷道侧壁垂直有效距离之间无线通信模块发出的无线电磁波的半波数且 n为激光探测仪与障碍物的有效距离之间无线通信模块发出的无线电磁波的半波数且 Lx为激光探测仪沿x1轴方向距离巷道侧壁的有效距离,Ly为激光探测仪沿y1轴方向距离障碍物的有效距离,λ为无线通信模块发出的无线电磁波的波长;
步骤604、判断当前环境下无线通信模块是否可以通信:当公式fc>f0满足时,说明当前环境下无线通信模块可以通信,执行步骤605,其中,f0为无线通信模块发出的无线电磁波频率;否则,当前环境下无线通信模块无法通信,执行步骤五;
步骤605、单侧巷道壁堆积障碍下通讯节点布放区域划分并计算对应区域的无线电磁波衰减率α1:通过障碍物坡面上一点到巷道顶部距离hi确定单侧巷道壁堆积障碍下通讯节点布放的障碍区域I和无障碍区域II,当不存在hi=b时,单侧巷道壁堆积障碍下只存在障碍区域I,此时的无线电磁波衰减率 其中,αEV为垂直极化衰减率,αHV为水平极化衰减率,λ为无线电磁波波长,ε为巷道环境介电常数,ai为与hi等高时的巷道截面宽;当存在hi=b时,单侧巷道壁堆积障碍下hi=b对应的区域为无障碍区域II,单侧巷道壁堆积障碍下hi<b对应的区域为障碍区域I,此时的无线电磁波衰减率
步骤606、完成单侧巷道壁堆积障碍下通讯节点的布放:通过环境探测器实时探测通讯节点的安全布放位置,当单侧巷道壁堆积障碍下只存在障碍区域I时,优先考虑将通讯节点布放在该障碍区域I中ai<hi的位置,若环境探测器探测该障碍区域I中ai<hi的位置无法安装通讯节点时,考虑该障碍区域I中ai=hi的位置,若环境探测器探测该障碍区域I中ai=hi的位置无法安装通讯节点时,最后考虑该障碍区域I中ai>hi的位置布放通讯节点;
当单侧巷道壁堆积障碍下存在障碍区域I和无障碍区域II时,优先考虑将通讯节点布放在无障碍区域II,若环境探测器探测无障碍区域II中无法安装通讯节点时,考虑将通讯节点布放在该情况下的障碍区域I,在该情况下的障碍区域I中,优先考虑将通讯节点布放在该情况下的障碍区域I中ai<hi的位置,若环境探测器探测该情况下的障碍区域I中ai<hi的位置无法安装通讯节点时,考虑该情况下的障碍区域I中ai=hi的位置,若环境探测器探测该情况下的障碍区域I中ai=hi的位置无法安装通讯节点时,最后考虑该情况下的障碍区域I中ai>hi的位置布放通讯节点;
步骤七、双侧巷道壁堆积障碍下通讯节点的布放,过程如下:
步骤701、建立双侧巷道壁堆积障碍空间坐标系O2-x2y2z2;
步骤702、根据公式 计算双侧巷道壁堆积障碍空间截面面积S2,其中,h'imax为双侧巷道壁堆积障碍空间截面面积S2的最大截面高度,θ1为巷道一侧障碍物坡面与步骤701中建立的坐标系O2-x2y2z2中的z2轴的夹角且θ1满足: θ2为巷道另一侧障碍物坡面与步骤701中建立的坐标系O2-x2y2z2中的z2轴的夹角且θ2满足:
步骤703、根据公式 计算当前环境下的截止频率fc';
步骤704、判断当前环境下无线通信模块是否可以通信:当公式f'c>f0满足时,说明当前环境下无线通信模块可以通信,执行步骤705;否则,当前环境下无线通信模块无法通信,执行步骤五;
步骤705、双侧巷道壁堆积障碍下通讯节点布放区域划分并计算对应区域的无线电磁波衰减率α2:通过靠近所述煤矿救援机器人的一侧障碍物坡面上一点到巷道顶部距离hi'确定双侧巷道壁堆积障碍下通讯节点布放的障碍区域I'和无障碍区域II',当不存在h'i=b时,双侧巷道壁堆积障碍下只存在障碍区域I',此时的无线电磁波衰减率 其中,ai'为与hi'等高时的巷道截面宽;当存在h'i=b时,双侧巷道壁堆积障碍下h'i=b对应的区域为无障碍区域II',双侧巷道壁堆积障碍下h'i<b对应的区域为障碍区域I',此时的无线电磁波衰减率
步骤706、完成双侧巷道壁堆积障碍下通讯节点的布放:通过环境探测器实时探测通讯节点的安全布放位置,当双侧巷道壁堆积障碍下只存在障碍区域I'时,优先考虑将通讯节点布放在该障碍区域I'中a'i<h'i的位置,若环境探测器探测该障碍区域I'中a'i<h'i的位置无法安装通讯节点时,考虑该障碍区域I'中a'i=h'i的位置,若环境探测器探测该障碍区域I'中a'i=h'i的位置无法安装通讯节点时,最后考虑该障碍区域I'中a'i>h'i的位置布放通讯节点;
当双侧巷道壁堆积障碍下存在障碍区域I'和无障碍区域II'时,优先考虑将通讯节点布放在无障碍区域II',若环境探测器探测无障碍区域II'中无法安装通讯节点时,考虑将通讯节点布放在该情况下的障碍区域I',在该情况下的障碍区域I'中,优先考虑将通讯节点布放在该情况下的障碍区域I'中a'i<h'i的位置,若环境探测器探测该情况下的障碍区域I'中a'i<h'i的位置无法安装通讯节点时,考虑该情况下的障碍区域I'中a'i=h'i的位置,若环境探测器探测该情况下的障碍区域I'中a'i=h'i的位置无法安装通讯节点时,最后考虑该情况下的障碍区域I'中a'i>h'i的位置布放通讯节点;
步骤八、多次循环步骤二至步骤七,直至完成井下通讯节点的布放过程。
上述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤一中环境探测器包括温度传感器、湿度传感器和惯性传感器。
上述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤二中通讯节点为无线中继器。
上述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤二中无线通信模块为WIFI无线通信模块。
上述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤601中建立的单侧巷道壁堆积障碍空间坐标系O1-x1y1z1为三维直角坐标系一,所述三维直角坐标系一以巷道延伸方向为y1轴,所述三维直角坐标系一中的z1轴竖直垂直于y1轴,所述三维直角坐标系一中的x1轴垂直于y1轴与z1轴组成的平面。
上述的基于无线通信传播特性井下救援机器人通讯节点布放方法,其特征在于:步骤701中建立的双侧巷道壁堆积障碍空间坐标系O2-x2y2z2为三维直角坐标系二,所述三维直角坐标系二以巷道延伸方向为y2轴,所述三维直角坐标系二中的z2轴竖直垂直于y2轴,所述三维直角坐标系二中的x2轴垂直于y2轴与z2轴组成的平面。
本发明与现有技术相比具有以下优点:
1、本发明的方法设计合理,实现方便且投入成本低,能够适用于实际复杂矿井环境中,操作简便。
2、本发明对井下巷道环境进行实时的检测,采用煤矿救援机器人自主前进或后退对通讯节点进行布放,通过激光探测仪采集巷道障碍物参数,通过连续的判断确定井下巷道是直空巷道、不可跨越巷道、单侧巷道壁堆积障碍巷道或者双侧巷道壁堆积障碍巷道,针对不同类型的巷道采取不同的布放规则,建立优化的无线网络环境。
3、本发明针对不同类型的巷道规划通讯节点布放位置时,考虑环境因素,优先考虑无障碍区电磁波衰减慢的区域,当无障碍区由于环境因素无法布放通讯节点时,考虑有障碍区电磁波衰减快的区域布放通讯节点,在有障碍区布放通讯节点时,障碍物越高,巷道的有效截面面积越小,电磁波衰减越快,考虑环境因素并沿电磁波衰减递增的方向在有障碍区布放通讯节点,实现无线网络环境最优化,同时最大程度的减少通讯节点的使用数量。
4、本发明能够有效解决复杂环境中煤矿救援人员、救援机器人等之间数据传输的问题,满足实际应用的需求。
综上所述,本发明设计新颖合理,通过煤矿救援机器人识别井下现场环境,实时探测井下通信信号强度,自主布放通讯节点,建立优化的无线网络环境,有效解决复杂环境中煤矿救援人员、救援机器人等之间数据传输的问题,便于推广使用。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
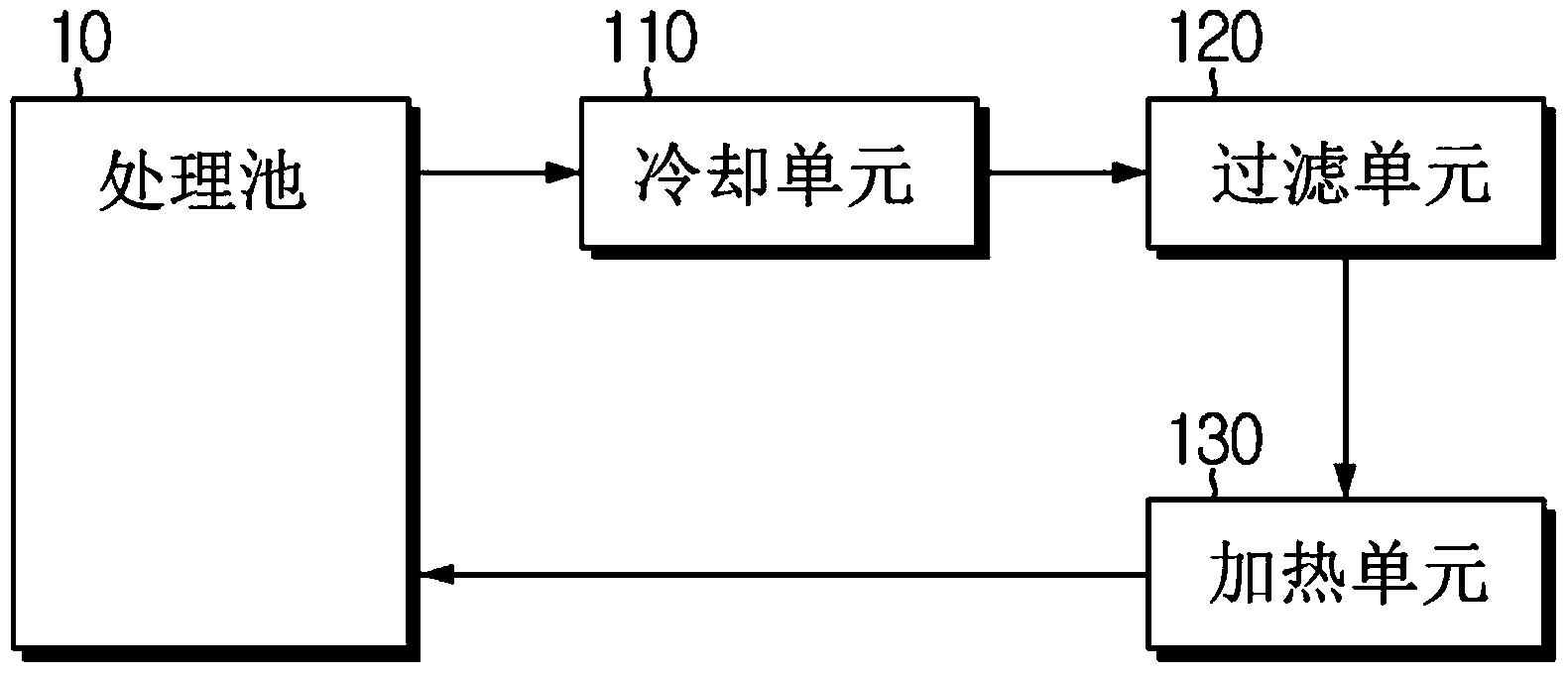
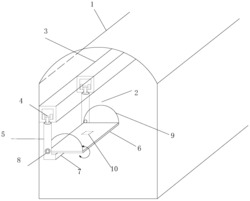
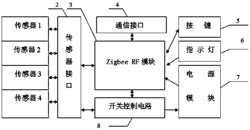
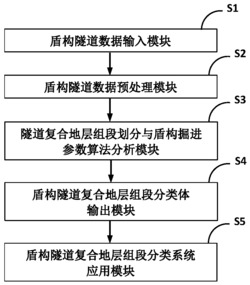
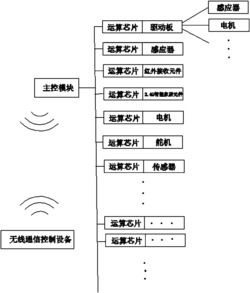
图1为本发明采用的井下通讯节点布放节点的电路原理框图。
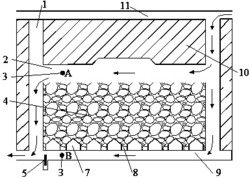
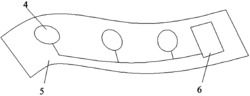
图2为本发明单侧巷道壁堆积障碍效果图。
图3为针对图2建立的空间坐标系O1-x1y1z1中O1-x1z1二维平面示意图。
图4为针对图2建立的空间坐标系O1-x1y1z1中O1-x1y1二维平面示意图。
图5为本发明双侧巷道壁堆积障碍效果图。
图6为针对图5建立的空间坐标系O2-x2y2z2中O2-x2z2二维平面示意图。
图7为针对图5建立的空间坐标系O2-x2y2z2中O2-x2y2二维平面示意图。
图8为本发明井下通讯节点布放方法的方法流程框图。
附图标记说明:
1—环境探测器; 2—激光探测仪;
3—煤矿救援机器人中央处理器; 4—舵机控制模块;
5—通讯模块; 6—无线通信模块; 7—行走机构。
具体实施方式
如图1和图8所示,本发明基于无线通信传播特性井下救援机器人通讯节点布放方法,包括以下步骤:
步骤一、获取地理信息采集井下巷道地形参数:采用煤矿救援机器人获取井下巷道地形参数及地理信息;
所述煤矿救援机器人上安装有用于采集巷道环境参数的环境探测器1和用于探测井下巷道地形障碍物的激光探测仪2,环境探测器1的信号输出端和激光探测仪2的信号输出端均与煤矿救援机器人中央处理器3的输入端连接,煤矿救援机器人中央处理器3的输出端接有用于控制所述煤矿救援机器人前进或后退的行走机构7;
需要说明的是,井下巷道分为直空巷道、不可跨越巷道、单侧巷道壁堆积障碍巷道或者双侧巷道壁堆积障碍巷道,采用煤矿救援机器人从巷道起点获取地理信息采集井下巷道地形参数,图2为单侧巷道壁堆积障碍效果图,图5为双侧巷道壁堆积障碍效果图。
步骤二、判断井下巷道壁是否有堆积障碍:采用激光探测仪2沿所述煤矿救援机器人前进方向探测井下巷道壁堆积障碍,当激光探测仪2探测到井下巷道壁有堆积障碍时,执行步骤三;当激光探测仪2探测井下巷道壁无堆积障碍时,采用与煤矿救援机器人中央处理器3相接的无线通信模块6实时采集井下通信信号强度,所述煤矿救援机器人根据井下通信信号强度在巷道内实时布放通讯节点5;
需要说明的是,所述煤矿救援机器人设置有用于布放通讯节点5的机械臂,所述机械臂采用舵机控制模块4控制动作,通过煤矿救援机器人中央处理器3驱动舵机控制模块4完成通讯节点5的位置布放工作。
实际使用中,激光探测仪2发出的探测信号不被反射接收时,说明井下巷道为直空巷道,采用无线通信模块6实时采集井下通信信号强度,在无线网络通信覆盖环境区域内考虑环境因素布放通讯节点5。
本实施例中,步骤二中通讯节点5为无线中继器。
本实施例中,步骤二中无线通信模块6为WIFI无线通信模块。
步骤三、判断煤矿救援机器人是否可以通过井下巷道壁堆积障碍:根据步骤二中激光探测仪2探测的井下巷道壁堆积障碍高度及范围判断煤矿救援机器人是否可以通行,当激光探测仪2发出的探测信号部分被反射接收时,说明煤矿救援机器人可以通过井下巷道壁堆积障碍,执行步骤四;当激光探测仪2发出的探测信号全部被反射接收时,说明煤矿救援机器人无法通过井下巷道壁堆积障碍,执行步骤五;
步骤四、判断井下巷道壁堆积障碍是否为单侧巷道壁堆积障碍:采用激光探测仪2探测井下巷道壁堆积障碍的高度及范围,并将探测结果送入煤矿救援机器人中央处理器3进行分析处理,煤矿救援机器人中央处理器3判断井下巷道壁堆积障碍为单侧巷道壁堆积障碍时,执行步骤六;否则,执行步骤七;
需要说明的是,激光探测仪2探测井下巷道壁堆积障碍的高度及范围时,当井下巷道壁两侧壁其中一个侧壁接收不到反射的探测信号时,煤矿救援机器人中央处理器3判断井下巷道壁堆积障碍为单侧巷道壁堆积障碍,当井下巷道壁两侧壁均可接收到反射的探测信号且位于巷道壁两侧壁之间的区域存在接收不到反射的探测信号时,煤矿救援机器人中央处理器3判断井下巷道壁堆积障碍为双侧巷道壁堆积障碍。
步骤五、煤矿救援机器人返回起点:采用煤矿救援机器人中央处理器3控制行走机构7沿原路返回至起点;
步骤六、单侧巷道壁堆积障碍下通讯节点的布放,过程如下:
步骤601、建立单侧巷道壁堆积障碍空间坐标系O1-x1y1z1;
如图3和图4所示,本实施例中,步骤601中建立的单侧巷道壁堆积障碍空间坐标系O1-x1y1z1为三维直角坐标系一,所述三维直角坐标系一以巷道延伸方向为y1轴,所述三维直角坐标系一中的z1轴竖直垂直于y1轴,所述三维直角坐标系一中的x1轴垂直于y1轴与z1轴组成的平面。
步骤602、根据公式 计算单侧巷道壁堆积障碍空间截面面积S1,其中,a为巷道宽,b为巷道高,θ为障碍物坡面与步骤601中建立的坐标系O1-x1y1z1中的z1轴的夹角且θ满足:
步骤603、根据公式 计算当前环境下的截止频率fc,其中,c为真空中光速,m为激光探测仪2与巷道侧壁垂直有效距离之间无线通信模块6发出的无线电磁波的半波数且 n为激光探测仪2与障碍物的有效距离之间无线通信模块6发出的无线电磁波的半波数且 Lx为激光探测仪2沿x1轴方向距离巷道侧壁的有效距离,Ly为激光探测仪2沿y1轴方向距离障碍物的有效距离,λ为无线通信模块6发出的无线电磁波的波长;
需要说明的是,激光探测仪2沿x1轴方向距离巷道侧壁的有效距离为无线通信模块6发出的无线电磁波衰减速度慢的一侧距离,所述煤矿救援机器人位于巷道内时,所述煤矿救援机器人的左右两侧分别与巷道侧壁保持一定的距离,针对单侧巷道壁堆积障碍,若单侧巷道壁堆积障碍在巷道左侧壁,则激光探测仪2沿x1轴方向距离巷道侧壁的有效距离为激光探测仪2距离巷道右侧壁的距离;若单侧巷道壁堆积障碍在巷道右侧壁,则激光探测仪2沿x1轴方向距离巷道侧壁的有效距离为激光探测仪2距离巷道左侧壁的距离;沿所述煤矿救援机器人前进方向,激光探测仪2距离前侧障碍物的垂直距离为激光探测仪2沿y1轴方向距离障碍物的有效距离。
步骤604、判断当前环境下无线通信模块是否可以通信:当公式fc>f0满足时,说明当前环境下无线通信模块6可以通信,执行步骤605,其中,f0为无线通信模块6发出的无线电磁波频率;否则,当前环境下无线通信模块6无法通信,执行步骤五;
步骤605、单侧巷道壁堆积障碍下通讯节点布放区域划分并计算对应区域的无线电磁波衰减率α1:通过障碍物坡面上一点到巷道顶部距离hi确定单侧巷道壁堆积障碍下通讯节点5布放的障碍区域I和无障碍区域I I,当不存在hi=b时,单侧巷道壁堆积障碍下只存在障碍区域I,此时的无线电磁波衰减率 其中,αEV为垂直极化衰减率,αHV为水平极化衰减率,λ为无线电磁波波长,ε为巷道环境介电常数,ai为与hi等高时的巷道截面宽;当存在hi=b时,单侧巷道壁堆积障碍下hi=b对应的区域为无障碍区域II,单侧巷道壁堆积障碍下hi<b对应的区域为障碍区域I,此时的无线电磁波衰减率
如图3和图4所示,本实施例中,单侧巷道壁堆积障碍堆积在巷道左侧壁,单侧巷道壁堆积障碍底部交于x1轴的u1点位置处,巷道宽交于x1轴的u2点位置处,当u1点和u2点重合时,不存在hi=b,单侧巷道壁堆积障碍下只存在障碍区域I;当u1点和u2点不重合时,存在hi=b,单侧巷道壁堆积障碍下hi=b对应的区域为无障碍区域II,即u1点和u2点之间的位置区域,单侧巷道壁堆积障碍下hi<b对应的区域为障碍区域I;
当ai=hi时,无线电磁波的水平极化波等于垂直极化波,此时,水平极化衰减率αEH等于垂直极化衰减率αEV,在单侧巷道壁堆积障碍空间截面面积S1横纵截面上传播的无线电磁波传输特性、信号强度、衰减量一致;
当ai>hi时,无线电磁波的水平极化波小于垂直极化波,即水平极化波的损耗小于垂直极化波损耗,因此,单侧巷道壁堆积障碍空间截面面积S1横纵截面上的信号传输特性由水平极化波主导;
当ai<hi时,无线电磁波的水平极化波大于垂直极化波,即水平极化波的损耗大于垂直极化波损耗,因此,单侧巷道壁堆积障碍空间截面面积S1横纵截面上的信号传输特性由垂直极化波主导。
步骤606、完成单侧巷道壁堆积障碍下通讯节点的布放:通过环境探测器1实时探测通讯节点5的安全布放位置,当单侧巷道壁堆积障碍下只存在障碍区域I时,优先考虑将通讯节点5布放在该障碍区域I中ai<hi的位置,若环境探测器1探测该障碍区域I中ai<hi的位置无法安装通讯节点5时,考虑该障碍区域I中ai=hi的位置,若环境探测器1探测该障碍区域I中ai=hi的位置无法安装通讯节点5时,最后考虑该障碍区域I中ai>hi的位置布放通讯节点5;
当单侧巷道壁堆积障碍下存在障碍区域I和无障碍区域II时,优先考虑将通讯节点5布放在无障碍区域II,若环境探测器1探测无障碍区域II中无法安装通讯节点5时,考虑将通讯节点5布放在该情况下的障碍区域I,在该情况下的障碍区域I中,优先考虑将通讯节点5布放在该情况下的障碍区域I中ai<hi的位置,若环境探测器1探测该情况下的障碍区域I中ai<hi的位置无法安装通讯节点5时,考虑该情况下的障碍区域I中ai=hi的位置,若环境探测器1探测该情况下的障碍区域I中ai=hi的位置无法安装通讯节点5时,最后考虑该情况下的障碍区域I中ai>hi的位置布放通讯节点5;
本实施例中,步骤一中环境探测器1包括温度传感器、湿度传感器和惯性传感器。
实际使用中,矿井环境恶劣,常常会出现水患、高温隐患或者倾斜松弛地面等等,导致无法安装通讯节点5,当单侧巷道壁堆积障碍下只存在障碍区域I或者障碍区域I和无障碍区域II同时存在时,优先考虑将通讯节点5布放在该障碍区域I中ai<hi的位置,该障碍区域I中ai<hi的位置为垂直极化波主导区域,若环境探测器1探测该障碍区域I中ai<hi的位置由于矿井环境恶劣无法安装通讯节点5时,考虑该障碍区域I中ai=hi的位置,该障碍区域I中ai=hi的位置为水平极化波等于垂直极化波区域,若环境探测器1探测该障碍区域I中ai=hi的位置由于矿井环境恶劣无法安装通讯节点5时,最后考虑该障碍区域I中ai>hi的位置布放通讯节点5。
本实施例中,步骤一中环境探测器1还包括气体传感器和气压计,可用于检测井下环境有害气体浓度和气压数据,将井下不同位置的实际数据采集回地面,便于地面监控人员的处理分析。
步骤七、双侧巷道壁堆积障碍下通讯节点的布放,过程如下:
步骤701、建立双侧巷道壁堆积障碍空间坐标系O2-x2y2z2;
如图6和图7所示,本实施例中,步骤701中建立的双侧巷道壁堆积障碍空间坐标系O2-x2y2z2为三维直角坐标系二,所述三维直角坐标系二以巷道延伸方向为y2轴,所述三维直角坐标系二中的z2轴竖直垂直于y2轴,所述三维直角坐标系二中的x2轴垂直于y2轴与z2轴组成的平面。
步骤702、根据公式 计算双侧巷道壁堆积障碍空间截面面积S2,其中,hi'max为双侧巷道壁堆积障碍空间截面面积S2的最大截面高度,θ1为巷道一侧障碍物坡面与步骤701中建立的坐标系O2-x2y2z2中的z2轴的夹角且θ1满足: θ2为巷道另一侧障碍物坡面与步骤701中建立的坐标系O2-x2y2z2中的z2轴的夹角且θ2满足:
步骤703、根据公式 计算当前环境下的截止频率fc';
步骤704、判断当前环境下无线通信模块是否可以通信:当公式f'c>f0满足时,说明当前环境下无线通信模块6可以通信,执行步骤705;否则,当前环境下无线通信模块6无法通信,执行步骤五;
步骤705、双侧巷道壁堆积障碍下通讯节点布放区域划分并计算对应区域的无线电磁波衰减率α2:通过靠近所述煤矿救援机器人的一侧障碍物坡面上一点到巷道顶部距离hi'确定双侧巷道壁堆积障碍下通讯节点5布放的障碍区域I'和无障碍区域II',当不存在h'i=b时,双侧巷道壁堆积障碍下只存在障碍区域I',此时的无线电磁波衰减率 其中,ai'为与hi'等高时的巷道截面宽;当存在h'i=b时,双侧巷道壁堆积障碍下h'i=b对应的区域为无障碍区域II',双侧巷道壁堆积障碍下h'i<b对应的区域为障碍区域I',此时的无线电磁波衰减率
如图6和图7所示,本实施例中,双侧巷道壁堆积障碍靠近所述煤矿救援机器人的堆积障碍在巷道左侧壁,双侧巷道壁堆积障碍底部交于x2轴的u3点位置处,巷道宽交于x2轴的u4点位置处,当u3点和u4点重合时,不存在h'i=b,双侧巷道壁堆积障碍下只存在障碍区域I';当u3点和u4点不重合时,存在h'i=b,双侧巷道壁堆积障碍下h'i=b对应的区域为无障碍区域II',双侧巷道壁堆积障碍下h'i<b对应的区域为障碍区域I';远离所述煤矿救援机器人的右堆积障碍底部交于x2轴的u5点位置处,当双侧巷道壁堆积障碍空间截面面积S2的最大截面高度h'imax=b时,u3点和u5点之间的区域为无障碍区域II',障碍区域I'有两处且两处障碍区域I'分别位于无障碍区域II'的两侧;当双侧巷道壁堆积障碍空间截面面积S2的最大截面高度h'imax<b时,u3点和u4点之间的区域为无障碍区域II'。
步骤706、完成双侧巷道壁堆积障碍下通讯节点的布放:通过环境探测器1实时探测通讯节点5的安全布放位置,当双侧巷道壁堆积障碍下只存在障碍区域I'时,优先考虑将通讯节点5布放在该障碍区域I'中a'i<h'i的位置,若环境探测器1探测该障碍区域I'中a'i<h'i的位置无法安装通讯节点5时,考虑该障碍区域I'中a'i=h'i的位置,若环境探测器1探测该障碍区域I'中a'i=h'i的位置无法安装通讯节点5时,最后考虑该障碍区域I'中a'i>h'i的位置布放通讯节点5;
当双侧巷道壁堆积障碍下存在障碍区域I'和无障碍区域II'时,优先考虑将通讯节点5布放在无障碍区域II',若环境探测器1探测无障碍区域II'中无法安装通讯节点5时,考虑将通讯节点5布放在该情况下的障碍区域I',在该情况下的障碍区域I'中,优先考虑将通讯节点5布放在该情况下的障碍区域I'中a'i<h'i
基于无线通信传播特性井下救援机器人通讯节点布放方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0