









专利摘要
本发明提出了一种地铁轮轨曲线运动智能润滑控制系统,用以解决现有钢轨润滑系统精确度不高,受车速影响较大的问题。包括主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统,主控系统包括MCU控制器、存储器、按键和电源,存储器、按键、电源、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统均与MCU控制器相连接,大容量存储系统与数据传输系统相连接,数据传输系统与数据存储系统相连接。本发明结构简单、方便、安全、性能可靠、智能化、节能环保、功耗低,采用通用芯片,降低成本,电路集成度高,技术成熟,制板工序少,容易生产。
权利要求
1.一种地铁轮轨曲线运动智能润滑控制系统,其特征在于,包括主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统,主控系统包括MCU控制器、存储器、按键和电源,存储器、按键、电源、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统均与MCU控制器相连接,大容量存储系统与数据传输系统相连接,数据传输系统与数据存储系统相连接。
2.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述数据采集系统包括陀螺仪、速度传感器和加速度传感器,陀螺仪、速度传感器和加速度传感器均与MCU控制器相连接;所述数据采集系统对地铁轮轨运动状态信息进行采集,包括位置、角度、速度、加速度和与拐弯处的距离,进行地铁的定位,判断地铁运行状态。
3.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述数据传输系统包括打包模块和GPRS通信模块,数据存储系统包括数据服务器,大容量存储系统与打包模块相连接,打包模块与GPRS通信模块相连接,GPRS通信模块与数据服务器相连接,数据服务器通过互联网与云平台相连接。
4.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述润滑系统包括打油控制器和打油电机,MCU控制器与打油控制器相连接,打油控制器与打油电机相连接;所述打油控制器采用模糊控制算法控制打油量的大小。
5.根据权利要求4所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述模糊控制算法为:若当前打油量大于基本打油量,则降低打油时间,差值越大,时间越短;若当前打油量低于基本打油量,则打油时间增加,差值越大,时间越长;若当前打油量和基本量相差很小,则保持打油固定时间后结束;
选择打油量偏差e,即基本打油量和当前打油量的差值作为观察量,选取电机运行打油时间u(t)为控制量,将打油量偏差e划分为5个模糊集,负大NB、负小NS、零ZO、正小PS、正大PB,打油量偏差e为负表示当前打油量少于基本打油量,打油量偏差e为正表示当前打油量大于基本打油量;
设定打油量偏差e的取值范围为[-3,3],隶属度函数如下:
同样,将控制量u划分为5个模糊集,负大NB、负小NS、零ZO、正小PS、正大PB,控制量u为负表示增大打油电机的时间,控制量u为正表示减小打油的时间,控制量u的取值范围为[-3,3];
根据模糊规则,推导出系统模糊器的输出,为简化计算,上述25个模糊子集分为5类,分别用A、B、C、D、E表示,当前时间的实际值经模糊化后输出为 , , , 。
6.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述电源子系统包括电源控制器、充电模块和电池,电源控制器和电池均与MCU控制器相连接,电源控制器与充电模块相连接,充电模块与电池相连接;所述电池为整个系统提供能量。
7.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述辅助室内定位系统包括射频接收器,射频接收器与MCU控制器相连接;地铁隧道内设有与射频接收器相匹配的RFID射频发射器,RFID射频发射器按照编号均匀的固定在地铁隧道顶部;射频接收器将接收的RFID射频发射器的信息发送给MCU控制器,MCU控制器根据RFID射频发射器的编号辅助定位,MCU控制器根据地铁进入的位置和时间,数据采集系统采集的地铁运行的速度和加速度确定地铁所在位置。
8.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述显示系统包括接口转换装置、显示驱动电路和显示屏,MCU控制器与接口转换装置相连接,接口转换装置与显示驱动电路相连接,显示驱动电路与显示屏相连接;所述显示屏用于显示速度、加速度、当前室内外温度、平衡度、距离打油时间、电池使用状态和使用情况、打油控制器状态、油箱液位信息和轮轨润滑信息。
9.根据权利要求1所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,所述大容量存储系统为在电路板上设计的flash大容量存储模块,大容量存储系统将地铁运行的各类信息暂时存储于本地存储空间中,待GPRS通信模块联通后再利用无线数据传输将信息传递到数据服务器。
10.根据权利要求1-9中任意一项所述的地铁轮轨曲线运动智能润滑控制系统,其特征在于,其工作方法为:
步骤一:电源上电,主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统初始化;
步骤二:数据采集系统将测量的地铁的速度和加速度传送至MCU控制器,MCU控制器根据地铁运行的时间、速度和加速度计算地铁运行的距离,通过预存的轨道弯曲处信息计算距离最近的轨道弯曲处的距离,判断是否到达润滑点,利用模糊控制算法计算润滑油量;
步骤三:当陀螺仪检测到转弯时,润滑系统的打油控制器启动打油电机进行润滑,并将润滑结果传送至MCU控制器,MCU控制器将润滑结果反馈至显示系统进行显示;
步骤四:地铁运行产生的数据暂时存储于大容量存储系统的存储空间,然后利用数据传输系统的GPRS通信模块将需要的数据通过打包模块打包后上传至后数据服务器;
步骤五:数据服务器将地铁轮轨曲线运动过程中润滑结果、地铁轮轨曲线运动角度、速度、加速度和地理位置信息进行保存,并初步处理,分析地铁运行状况;
步骤六:MCU控制器循环步骤二、三、四继续进行润滑点的检测。
说明书
技术领域
本发明涉及地铁润滑和MCU控制的技术领域,尤其涉及一种地铁轮轨曲线运动智能润滑控制系统,可以在地铁运行到拐弯处对轮轨进行润滑。
背景技术
改革开放30年来,伴随着我国国民经济的快速发展,我国的铁路基础设施建设日新月异,特别是高速铁路的建设,得到迅速的发展,相关数据表明,2015年末,全国铁路营业里程、高速铁路里程、公路通车里程、高速公路里程分别达到12万公里、1.9万公里、457万公里、12万公里,分别比2012年末增长23.0%、103.1%、7.8%、24.7%;其中高铁里程占世界高铁总里程的60%以上,居世界第一,铁路快速客运网基本覆盖我国50万以上人口城市。
中国当前处于城镇化高速推进阶段,城镇化率以每年1个百分点的速度增加,这意味着每年有两千万左右的新增城市人口,由此将给中国现有城市交通基础设施带来巨大挑战。另外,中国城市建设的同时还需受到国家保护耕地政策的限制,因而决定了中国城市只能走土地集约型发展道路,不能像美国等国家一样发展小汽车为主的交通方式,城市轨道交通建设成为中国的首选。
中国城市轨道交通建设始于1965年开通的北京地铁1号线,此后相当长一段时间内,中国城市轨道交通发展较为缓慢。步入上世纪90年代及21世纪初中国先后出现两次城市轨道交通建设高潮,当时各个城市纷纷推出地铁、轻轨修建规划,投资热情一度高涨,但考虑到财政实力,国家批准的却并不多,批准建设项目基本集中在北京、上海、广州三地。
2000年以来,中国每年新运行轨道交通里程都在50公里以上,中国地铁及轻轨建设步入快速发展期。2014年,中国地铁及轻轨为3155公里,较上年增长409公里;从我国城市轨道交通运营情况来看,上海市城轨交通运营里程为643公里,总里程排名第一位,而南京市城市轨道交通全年新增运营里程排名全国第一,达到95公里。从各地城市建设来看,全国正面临各地都在急速增长的轨道交通建设需求。除了已有地铁投入运营的北京、上海、广州等城市,青岛、大连、南京等30多个城市也纷纷批复或已经申请轨道建设项目立项。
地铁是地下铁道交通的简称,属于轨道交通行业。地铁是采用在地下挖隧道,运用有轨电力机车牵引的交通方式,除为方便乘客,在地面每隔一段距离建一个进出站口外,一般不占用城市的土地和空间,既不对地面构成环境污染,又可为乘客躲避城市的嘈杂提供良好环境。地铁是一种独立的有轨交通系统,其正常运行不受地面道路拥挤的影响,能快捷、安全、舒适地运送旅客。轨道交通是现代城市交通的主流和方向,其运量大、速度快、干扰小、能耗低,被誉为现代城市的大动脉,是一座城市融入国际大城市现代化交通的显著标志,它不仅是一个国家国力和科技水平的实力展现,而且是解决大城市交通紧张状况的最有效的方式。与其他交通方式相比,地铁交通的主要特点如下:一是地铁交通是大型城市基础设施,为社会生产和生活提供基础服务,具有显著的公益性;二是地铁交通基础设施的线路、车站、通信和车辆等,具有资产专用性,一经完成不能他用;三是地铁交通建设成本高,规模大,回收周期长,但地铁网络系统规模的扩大,可以降低成本;四是地铁交通项目的规划、设计、建设和运营等各阶段,需多专业、多行业、多企业间相互配合。
近年来,随着我国城市规模成倍扩大,基础设施落后问题显现,城市交通运输矛盾日益突出。城市轨道交通以其安全、准时、快速的优点,在拓宽城市空间、打造城市快速立体交通网络和改善城市交通环境方面发挥越来越大的作用。全国各大城市根据城市可持续发展和城市交通健康发展的需要,都在积极规划建设城市轨道交通项目。我国城市轨道交通获得长足发展,线路长度、机车数量、客运数量等指标都有大幅增长,我国已成为世界最大的城市轨道交通建设市场,经济稳定发展以及政府的大力支持,使得我国轨道交通建设规模逐步扩大。
日新月异的地铁装备现代化和相对滞后的基础设施维修、养护水平不相协调,其中一个特别突出的问题就是两者的结合点——轮轨关系。特别是地铁拐弯是依靠轮轨和钢轨的摩擦力来实现的,这对轮轨和钢轨都是很大的伤害,因此为降低这种摩擦,在拐弯处在轮轨侧面打润滑油降低摩擦,保护轮轨和钢轨。现代轨道交通运输领域中,轮轨摩擦与润滑关系到机车牵引能量消耗、行车安全、轮轨材料消耗及维修成本等,因此受到各国铁路部门的重视。列车运行速度的进一步提高,轮轨润滑控制问题变得越来越突出。合理有效的轮轨润滑可减少轮轨磨损,对节能和提高机车牵引效率也有重要意义,同时可提高列车运行的安全性。
车轮与钢轨间的摩擦及受力情况非常复杂,既有一定弧度的离心力引起的侧面压力,又有轮缘与轨道侧面的滑动摩擦,要实现轨道交通中高效合理的润滑,需要建立摩檫和受力模型,深入研究受力之间的关系。由此,建立轮轨和摩檫模型,分析受力情况,实时准确地将润滑剂输送到指定部位具有十分重要的意义;其次,还要建立打润滑油时间和曲线半径大小之间的关系,早打和晚打起不到润滑作用,同时也会污染环境;再次,还需要建立打油量和润滑光度之间的关系,打油要适量,多了也会污染环境,少了起不到润滑的作用。
就轮轨润滑而言,车载轮缘润滑系统发展较迅速,各种形式和原理的车载轮缘润滑系统层出不穷。目前轮轨润滑技术大致分为车载轮缘润滑系统、车载钢轨润滑系统、地面钢轨润滑系统和车载轮缘固体润滑技术。按润滑剂分为润滑油、润滑脂、油性润滑剂、固体润滑剂。由于车辆的振动,车载钢轨润滑系统涂油位置的准确性很难控制,因此大部分同类润滑器受车速限制,有些地方使用专用涂油车。美国曾进行了大范围的“地面+车载”轮轨润滑试验,两者结合使用可节省燃料消耗25%~35%。在半径350m的曲线上实施润滑,可减少列车运行阻力50%。
作为控制器的核心单元,基于嵌入式的MCU控制技术伴随着微控制单元应用和开发走过了二十余年的历程,逐渐嵌入到社会生活各个方面。而且处理器也从前期的8位处理器平台向32位高级RISC处理器平台转变的趋势,从无操作系统到有操作系统,但8位机以其方便、快捷,外围电路简单等优势,依然难以被取代。目前,嵌入式MCU控制技术已被广泛应用到国民经济各行业、军事及家用电器等各个领域,尤其是手机、汽车自动导航设备、PDA、智能玩具、智能家电、医疗设备等行业。国内嵌入式平台有超过10余万名从事微控制单元解决方案开发应用的工程师,为嵌入式MCU控制技术的广泛应用提供了巨大的人才基础,两化融合和工业4.0的机遇也为嵌入式解决方案的开发提供了无限的商机。
发明内容
针对现有钢轨润滑系统精确度不高,受车速影响较大的技术问题,本发明提出一种地铁轮轨曲线运动智能润滑控制系统,通过MCU控制器控制润滑系统对轮轨进行打油,能实时准确地将润滑剂输送到指定部位。
为了达到上述目的,本发明的技术方案是这样实现的:一种地铁轮轨曲线运动智能润滑控制系统,包括主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统,主控系统包括MCU控制器、存储器、按键和电源,存储器、按键、电源、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统均与MCU控制器相连接,大容量存储系统与数据传输系统相连接,数据传输系统与数据存储系统相连接。
所述数据采集系统包括陀螺仪、速度传感器和加速度传感器,陀螺仪、速度传感器和加速度传感器均与MCU控制器相连接;所述数据采集系统对地铁轮轨运动状态信息进行采集,包括位置、角度、速度、加速度和与拐弯处的距离,进行地铁的定位,判断地铁运行状态。
所述数据传输系统包括打包模块和GPRS通信模块,数据存储系统包括数据服务器,大容量存储系统与打包模块相连接,打包模块与GPRS通信模块相连接,GPRS通信模块与数据服务器相连接,数据服务器通过互联网与云平台相连接。
所述润滑系统包括打油控制器和打油电机,MCU控制器与打油控制器相连接,打油控制器与打油电机相连接;所述打油控制器采用模糊控制算法控制打油量的大小。
所述模糊控制算法为:若当前打油量大于基本打油量,则降低打油时间,差值越大,时间越短;若当前打油量低于基本打油量,则打油时间增加,差值越大,时间越长;若当前打油量和基本量相差很小,则保持打油固定时间后结束;
选择打油量偏差e,即基本打油量和当前打油量的差值作为观察量,选取电机运行打油时间u(t)为控制量,将打油量偏差e划分为5个模糊集,负大NB、负小NS、零ZO、正小PS、正大PB,打油量偏差e为负表示当前打油量少于基本打油量,打油量偏差e为正表示当前打油量大于基本打油量。设定打油量偏差e的取值范围为[-3,3],隶属度函数如下:
同样,将控制量u划分为5个模糊集,负大NB、负小NS、零ZO、正小PS、正大PB,控制量u为负表示增大打油电机的时间,控制量u为正表示减小打油的时间,控制量u的取值范围为[-3,3];
根据模糊规则,推导出系统模糊器的输出,上述25个模糊子集分为5类,分别用A、B、C、D、E表示,当前时间的实际值经模糊化后输出为 , , , 。
所述电源子系统包括电源控制器、充电模块和电池,电源控制器和电池均与MCU控制器相连接,电源控制器与充电模块相连接,充电模块与电池相连接;所述电池为整个系统提供能量。
所述辅助室内定位系统包括射频接收器,射频接收器与MCU控制器相连接;地铁隧道内设有与射频接收器相匹配的RFID射频发射器,RFID射频发射器按照编号均匀的固定在地铁隧道顶部;射频接收器将接收的RFID射频发射器的信息发送给MCU控制器,MCU控制器根据RFID射频发射器的编号辅助定位,MCU控制器根据地铁进入的位置和时间,数据采集系统采集的地铁运行的速度和加速度确定地铁所在位置。
所述显示系统包括接口转换装置、显示驱动电路和显示屏,MCU控制器与接口转换装置相连接,接口转换装置与显示驱动电路相连接,显示驱动电路与显示屏相连接;所述显示屏用于显示速度、加速度、当前室内外温度、平衡度、距离打油时间、电池使用状态和使用情况、打油控制器状态、油箱液位信息和轮轨润滑信息。
所述大容量存储系统为在电路板上设计的flash大容量存储模块,大容量存储系统将地铁运行的各类信息暂时存储于本地存储空间中,待GPRS通信模块联通后再利用无线数据传输将信息传递到数据服务器。
其工作方法为:
步骤一:电源上电,主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统初始化;
步骤二:数据采集系统将测量的地铁的速度和加速度传送至MCU控制器,MCU控制器根据地铁运行的时间、速度和加速度计算地铁运行的距离,通过预存的轨道弯曲处信息计算距离最近的轨道弯曲处的距离,判断是否到达润滑点,利用模糊控制算法计算润滑油量;
步骤三:当陀螺仪检测到转弯时,润滑系统的打油控制器启动打油电机进行润滑,并将润滑结果传送至MCU控制器,MCU控制器将润滑结果反馈至显示系统进行显示;
步骤四:地铁运行产生的数据暂时存储于大容量存储系统的存储空间,然后利用数据传输系统的GPRS通信模块将需要的数据通过打包模块打包后上传至后数据服务器;
步骤五:数据服务器将地铁轮轨曲线运动过程中润滑结果、地铁轮轨曲线运动角度、速度、加速度和地理位置信息进行保存,并初步处理,分析地铁运行状况;
步骤六:MCU控制器循环步骤二、三、四继续进行润滑点的检测。
本发明的有益效果:能够进行合理有效的轮轨润滑,减少轮轨磨损,实现节能和提高机车牵引效率,同时提高列车运行的安全性。本发明具有结构简单、方便、安全、性能可靠、智能化、节能环保、功耗低等优点,采用通用芯片,降低成本,电路集成度高,技术成熟,制板工序少,容易生产。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
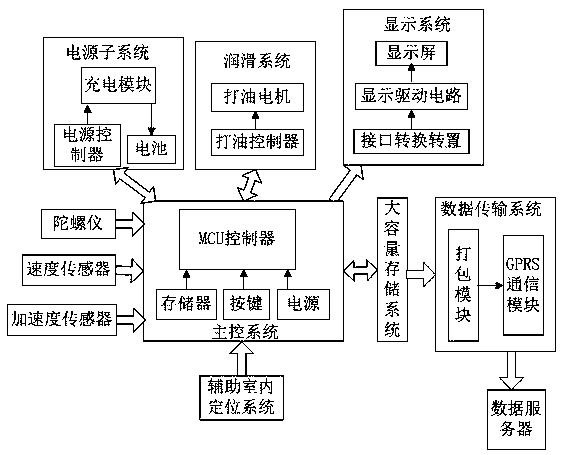
图1为本发明的原理框图。
图2为本发明主控系统的流程图。
图3为本发明模糊控制的流程图。
图4为本发明隶属度函数的图像。
图5为本发明模糊控制算法的仿真图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,一种地铁轮轨曲线运动智能润滑控制系统,其特征在于,包括主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统,主控系统包括MCU控制器、存储器、按键和电源,存储器、按键、电源、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统均与MCU控制器相连接,大容量存储系统与数据传输系统相连接,数据传输系统与数据存储系统相连接。根据地铁在地下时难以完成GPRS的实时传输,大容量存储系统用于暂时保存数据在本地存储空间,待等到有GPRS信号时通过数据传输系统将数据传送至数据存储系统。
数据采集系统包括陀螺仪、速度传感器和加速度传感器,陀螺仪、速度传感器和加速度传感器均与MCU控制器相连接;所述数据采集系统对地铁轮轨运动状态信息进行采集,包括位置、角度、速度、加速度和与拐弯处的距离,进行地铁的定位,判断地铁运行状态。数据采集通过速度、加速度、陀螺仪等多类传感器实现,这些传感器将检测到的基本信息,按一定协议、一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。传感器具有微型化、数字化、智能化、多功能化、系统化、网络化等特点,是实现自动检测和自动控制的首要环节。
数据传输系统包括打包模块和GPRS通信模块,数据存储系统包括数据服务器,大容量存储系统与打包模块相连接,打包模块与GPRS通信模块相连接,GPRS通信模块与数据服务器相连接,数据服务器通过互联网与云平台相连接。数据传输系统利用GPRS无线通信技术对地铁在拐弯等曲线运动过程中润滑结果、地铁轮轨曲线运动角度、速度、加速度和地理位置信息进行上传。数据存储系统接收地铁在拐弯等曲线运动过程中润滑结果、地铁轮轨曲线运动角度、速度、加速度和地理位置等信息。数据传输通过GPRS通信模块实现,将数据上传到数据服务器。GPRS通信模块可以实现在任何时间、任何地点快速方便地接入互联网。它具有高速数据传输、永远在线、按数据流量计费等特点。被广泛应用于移动办公、移动商务、移动信息服务、移动互联网、多媒体业务等。
润滑系统包括打油控制器和打油电机,MCU控制器与打油控制器相连接,打油控制器与打油电机相连接,实现对地铁行驶到拐弯处时进行打润滑油润滑钢轨侧面。打油控制器采用模糊控制算法控制打油量的大小。打油量的大小采用模糊控制算法实现分类,根据地铁轮轨曲线运动角度、速度、加速度和地理位置等信息和经验值设计合适的打油量,利用模糊控制算法实现打油控制。打油电机为直流电机,在油箱里形成一定压力,实现对地铁轮轨在拐弯等曲线运动时进行智能润滑。
打油控制难以用精确数据来描述,采用模糊控制的办法就显得意义重大。因为模糊控制不用建立数学模型不需要预先知道过程精确的数学模型。建立模糊量和精确量之间相互转化的模型至关重要,其控制流程如图3所示。
模糊控制算法为:若当前打油量大于基本打油量,则降低打油时间,差值越大,时间越短;若当前打油量低于基本打油量,则打油时间增加,差值越大,时间越长;若当前打油量和基本量相差很小,则保持打油固定时间后结束;
选择打油量偏差e,即基本打油量和当前打油量的差值作为观察量,选取电机运行打油时间u(t)为控制量,将打油量偏差e划分为5个模糊集,负大NB、负小NS、零ZO、正小PS、正大PB,打油量偏差e为负表示当前打油量少于基本打油量,打油量偏差e为正表示当前打油量大于基本打油量。设定打油量偏差e的取值范围为[-3,3],隶属度函数如下:
同样,将控制量u划分为5个模糊集,负大NB、负小NS、零ZO、正小PS、正大PB,控制量u为负表示增大打油电机的时间,控制量u为正表示减小打油的时间,控制量u的取值范围为[-3,3],隶属度函数如图4所示。
根据模糊规则,推导出系统模糊器的输出,为简化计算,上述25个模糊子集分为5类,分别用A、B、C、D、E表示,当前时间的实际值经模糊化后输出为 , , , 。根据打油规则,计算出偏差量,去模糊化。模糊规则仿真结果如图5所示。
电源子系统包括电源控制器、充电模块和电池,电源控制器和电池均与MCU控制器相连接,电源控制器与充电模块相连接,充电模块与电池相连接;所述电池为整个系统提供能量。电源子系统分为直接供电分系统和备用电源充电分系统。直接供电分系统采用直流供电模式,包括12V、5V、和3.3V三种电压模式,以应对不同的电压需求。备用电源充电分系统在不使用时进行充电,充电满时进入保持状态,当主电源掉电或者是停电时则对外提供电能,以保证系统的正常工作。
辅助室内定位系统利用基于IC卡的室内简易定位控制技术,实现地铁的辅助定位,结合地铁进入地下的位置和时刻,利用地铁的速度、加速度等信息,综合出地铁的位置信息。辅助室内定位系统包括射频接收器,射频接收器与MCU控制器相连接;地铁隧道内设有与射频接收器相匹配的RFID射频发射器,RFID射频发射器按照编号均匀的固定在地铁隧道顶部;射频接收器将接收的RFID射频发射器的信息发送给MCU控制器,MCU控制器根据RFID射频发射器的编号辅助定位,MCU控制器根据地铁进入的位置和时间,数据采集系统采集的地铁运行的速度和加速度确定地铁所在位置。
显示系统包括接口转换装置、显示驱动电路和显示屏,MCU控制器与接口转换装置相连接,接口转换装置与显示驱动电路相连接,显示驱动电路与显示屏相连接;所述显示屏用于显示速度、加速度、当前室内外温度、平衡度、距离打油时间、电池使用状态和使用情况、打油控制器状态、油箱液位信息和轮轨润滑信息,如润滑程度、上次打油时间、润滑是否成功等。显示屏分类显示地铁当前运行情况,设置多个子界面显示相关内容。
大容量存储系统保存核心数据,在应急时离线保存相应数据。大容量存储系统为在电路板上设计的flash大容量存储模块,大容量存储系统将地铁运行的各类信息暂时存储于本地存储空间中,待GPRS通信模块联通后再利用无线数据传输将信息传递到数据服务器。数据存储包括片内flash存储模块和后台数据服务器,将GPRS传输模块传输的数据实时存储到后台服务器中,或者在没有GPRS信号的时候直接保存在本地存储单元种实现,后台服务器提供容灾备份的数据和信息服务器。
其工作方法为:
步骤一:电源上电,主控系统、显示系统、电源子系统、润滑系统、辅助室内定位系统、大容量存储系统、数据采集系统、数据传输系统和数据存储系统初始化;如图2所示。
步骤二:数据采集系统将测量的地铁的速度和加速度传送至MCU控制器,MCU控制器根据地铁运行的时间、速度和加速度计算地铁运行的距离,通过预存的轨道弯曲处信息计算距离最近的轨道弯曲处的距离,判断是否到达润滑点,利用模糊控制算法计算润滑油量。
步骤三:当陀螺仪检测到转弯时,润滑系统的打油控制器启动打油电机进行润滑,并将润滑结果传送至MCU控制器,MCU控制器将润滑结果反馈至显示系统。
步骤四:地铁运行产生的数据暂时存储于大容量存储系统的存储空间,然后利用数据传输系统的GPRS通信模块将需要的数据通过打包模块打包后上传至数据存储系统的数据服务器。
步骤五:数据服务器将地铁轮轨曲线运动过程中润滑结果、地铁轮轨曲线运动角度、速度、加速度和地理位置信息进行保存,并初步处理,分析地铁运行状况。
步骤六:MCU控制器循环步骤二、三、四继续进行润滑点的检测。
本发明根据数据采集系统当前采集的速度和加速度,及室内外温度、打油控制器状态、油箱液位信息等地铁工作状态信息,利用模糊分类控制算法,计算打油量,并将计算结果传输到润滑子系统,打油结束后显示润滑是否成功等信息。根据地铁进入地下的位置,地铁运行的速度、加速度等状态,结合辅助室内定位系统计算出地铁所在位置信息。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种地铁轮轨曲线运动智能润滑控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0