








专利摘要
本发明提供一种高精度转向控制的气动搬运车及其转向控制方法,以解决当前搬运类小车转向精度低,因电动机电磁辐射和电火花等原因难以适用于高精度、易燃易爆等场合。所述一种高精度转向控制的气动搬运车包括载物台、车架、车轮、抬升气缸组件、抬升推板、后驱动气缸支持座、后驱动气缸、气动螺旋转向驱动器、前车轮轴、前棘爪盘、前棘轮齿轮、前传动齿轮、前驱动齿条、后驱动齿条、后传动齿轮、后棘爪盘、后车轮轴、后棘轮齿轮、前驱动气缸和前驱动气缸支持座。利用压电超声振动控制螺纹副自锁解锁,结合压缩空气实现法兰盘空心螺杆的运动和制动,并对抬升气缸和气动螺旋转向驱动器的交替供气控制,实现搬运车的精确转向。
权利要求
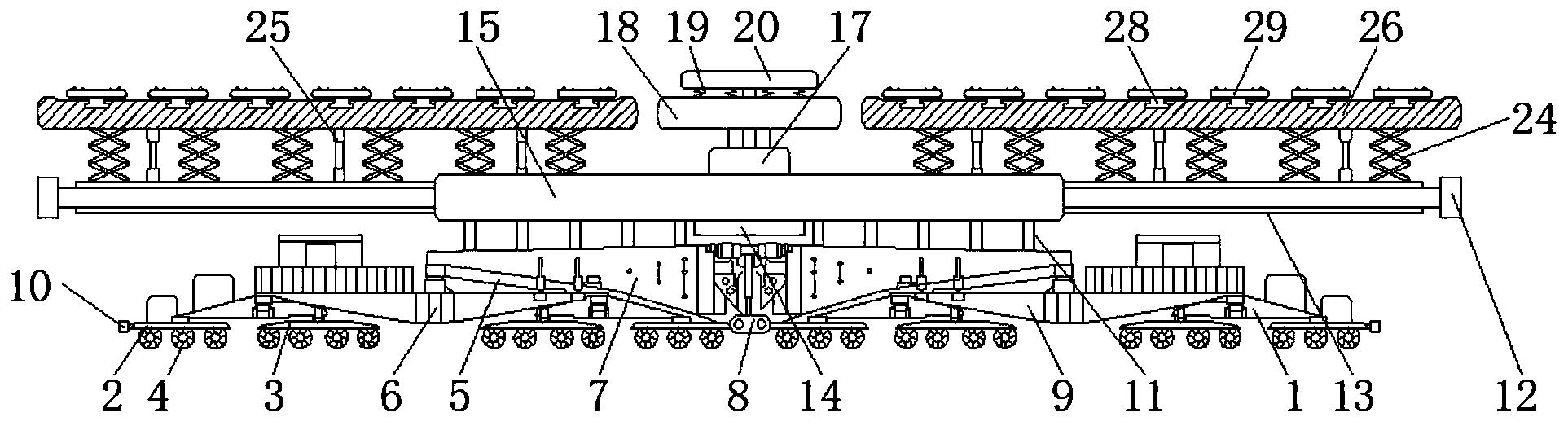
1.一种高精度转向控制的气动搬运车,其特征在于:所述一种高精度转向控制的气动搬运车包括载物台(1)、车架(2)、车轮(3)、抬升气缸组件(4)、抬升推板(5)、后驱动气缸支持座(6)、后驱动气缸(7)、气动螺旋转向驱动器(8)、前车轮轴(9)、前棘爪盘(10)、前棘轮齿轮(11)、前传动齿轮(12)、前驱动齿条(13)、后驱动齿条(14)、后传动齿轮(15)、后棘爪盘(16)、后车轮轴(17)、后棘轮齿轮(18)、前驱动气缸(19)和前驱动气缸支持座(20);所述载物台(1)螺钉连接在车架(2)上,车轮(3)分别配合连接在前车轮轴(9)和后车轮轴(17)两端;所述抬升气缸组件(4)包括气缸主体(4-1)、螺母(4-2),所述抬升气缸组件(4)装卡在载物台(1)和车架(2)之间,在车架(2)的横梁上设置有沉孔(2-1),其与放置抬升气缸组件(4)端部配合连接的螺母(4-2)配合;所述抬升推板(5)焊接在抬升气缸组件(4)的活塞杆端部;所述后驱动气缸(7)固定放置在后驱动气缸支持座(6)上,后驱动气缸支持座(6)螺钉连接在车架(2)上;所述气动螺旋转向驱动器(8)螺栓连接在载物台(1)的下表面上;所述前车轮轴(9)配合连接在车架(2)上,其上嵌套有前棘爪盘(10);所述前棘轮齿轮(11)内置轴承配合连接在前车轮轴(9)上,其上设置的棘爪槽(11-1)与前棘爪盘(10)配合嵌套;所述前传动齿轮(12)轴承连接在车架(2)设置的前凸起(2-2)上,并与前棘轮齿轮(11)上设置的齿轮段(11-2)啮合;所述前驱动齿条(13)焊接在前驱动气缸(19)的活塞杆端部,运动时与前传动齿轮(12)进行啮合;所述后驱动齿条(14)焊接在后驱动气缸(7)的活塞杆端部,运动时与后传动齿轮(15)啮合;所述后传动齿轮(15)轴承连接在车架(2)设置的后凸起(2-3)上;所述后棘爪盘(16)嵌套在后车轮轴(17)上,与后棘轮齿轮(18)配合;所述后棘轮齿轮(18)结构与前棘轮齿轮(11)相同,其内置轴承配合连接在后车轮轴(17)上与后传动齿轮(15)啮合;所述前驱动气缸(19)固定放置在前驱动气缸支持座(20)上;所述前驱动气缸支持座(20)螺钉连接在车架(2)上。
2.根据权利要求1所述的一种高精度转向控制的气动搬运车,其特征在于:所述气动螺旋转向驱动器(8)包括法兰盘空心螺杆(8-1)、密封圈(8-2)、活塞杆(8-3)、激振法兰螺母(8-4)、密封端盖(8-5);所述法兰盘空心螺杆(8-1)其上设置有腔体(8-1-1)、螺杆外螺纹(8-1-2)、连接螺纹孔(8-1-3),所述腔体(8-1-1)被活塞杆(8-3)分成前腔(8-1-1-1)和后腔(8-1-1-2);所述螺杆外螺纹(8-1-2)与激振法兰螺母(8-4)旋合连接;所述密封圈(8-2)嵌套在活塞杆(8-3)上的凹槽(8-3-1)内;所述活塞杆(8-3)另一端设置有外螺纹(8-3-2),螺纹连接在激振法兰螺母(8-4)内部;所述活塞杆(8-3)内部还设置有两个通气孔(8-3-3),一个与前腔(8-1-1-1)相通,另一个与后腔(8-1-1-2)相通。
3.根据权利要求2所述的一种高精度转向控制的气动搬运车,其特征在于:所述激振法兰螺母(8-4)为d
4.根据权利要求2所述的一种高精度转向控制的气动搬运车,其特征在于:所述密封端盖(8-5)为凸台结构,其上设置有外橡胶垫圈(8-5-1)、内橡胶垫圈(8-5-2)、连接螺栓(8-5-3);所述外橡胶垫圈(8-5-1)置于密封端盖(8-5)与法兰盘空心螺杆(8-1)之间,所述内橡胶垫圈(8-5-2)置于密封端盖(8-5)与活塞杆(8-3)之间;所述连接螺栓(8-5-3)与连接螺纹孔(8-1-3)配合连接。
5.根据权利要求2所述的一种高精度转向控制的气动搬运车,其特征在于:所述激振法兰螺母(8-4)为d
6.根据权利要求2所述的一种高精度转向控制的气动搬运车,其特征在于:所述激振法兰螺母(8-4)为d
7.一种高精度转向控制的气动搬运车转向控制方法,该转向控制方法是基于权利要求1所述的一种高精度转向控制的气动搬运车实现;气动搬运车到达预定位置时,首先给气动螺旋转向驱动器(8)供气,气压足够后给激振法兰螺母(8-4)通电,激振法兰螺母(8-4)振动基于超声减摩原理使螺纹副解锁,从而在气压作用和螺纹导向下法兰盘空心螺杆(8-1)旋转着向下伸出,法兰盘空心螺杆(8-1)下端面碰触地面后将支撑起整个车体进行转动,直至转动到设定角度时,使激振法兰螺母(8-4)断电,其停止振动后螺纹副立刻自锁,锁定当前转角,随后给抬升气缸组件(4)供气,抬升气缸组件(4)推动抬升推板(5)向下移动至法兰盘空心螺杆(8-1)离地,停止供气,然后给气动螺旋转向驱动器(8)供反向气压,气压足够后给激振法兰螺母(8-4)通电,激振法兰螺母(8-4)振动使螺纹副解锁,从而在气压作用和螺纹导向下法兰盘空心螺杆(8-1)旋转着向上缩回,至极限位置后断电断气,同时给抬升气缸组件(4)供反向气压,抬升气缸组件(4)拉动抬升推板(5)回位,直至车轮(3)完全接触地面时停止供气,完成整个转向过程。
8.一种高精度转向控制的气动搬运车运动控制方法,该运动控制方法是基于权利要求1所述的一种高精度转向控制的气动搬运车实现;所述运动控制方法为后驱动气缸(7)缩回使处于啮合状态的后驱动齿条(14)和后传动齿轮(15)联动,前驱动气缸(19)伸长使前驱动齿条(13)和前传动齿轮(12)分离;运行时,给后驱动气缸(7)供气,活塞伸长推动后驱动齿条(14)移动,通过传动齿轮(15)将动力传递给后棘轮齿轮(18),通过棘轮棘爪结构将动力传递到车轮上,使车轮转动,驱动小车向前运动,后驱动气缸(7)活塞杆回缩时,因棘轮机构作用,动力不传递给车轮;反向时,使后驱动气缸(7)活塞杆处于伸长状态时停止供气,转而对前驱动气缸(19)供气,本来处于伸长状态的前驱动气缸(19)活塞杆回缩使前驱动齿条(13)和前传动齿轮(12)啮合运动,将动力通过前棘轮齿轮(11)上设置的棘轮棘爪机构传递到车轮上,使车轮反向运动,从而带动小车倒退运动。
说明书
技术领域
本发明涉及气动技术及车辆运动领域,具体涉及一种高精度转向控制的气动搬运车及其转向控制方法。
背景技术
搬运车一般用于工厂车间、仓库,搬运重物或不便直接接触的物品。其结构由车轮、机架、电动机或内燃机、传动机构等部分组成。常见的小车多采用电动机驱动,其转向方式有三种:依靠主动车轮的差速控制实现转向、依靠从动车轮的转向控制方向、依靠其它电动机驱动相关机构实现车体自转。
当前搬运机械中著名的小型搬运车是搬运小坦克系列的电动搬运车,其结构简单、承载能力大、可控性好,广泛应用于自动化仓储中的物品搬运。具有防爆性能的一类搬运车。主要有蓄电池防爆叉车和蓄电池防爆搬运车。对于火花、静电、温度等引起爆炸的因素作了全面处理。电机、电器都设计为隔爆型,电源装置设计为防爆特殊型。适用于石油、化工、纺织、制药、食品、国防等工业部门存在有爆炸性气体混合物的危险场所,用来在搬运站进行货物的装卸、搬运、堆码等操作。除此之外还有大型搬运机械如叉车、循迹车等搬运类工具,这些工具的特点均是体积较大,运动空间较大,因此当前需要一种小型大承载力、精度较高的搬运车。
由于电动机本身存在的电磁辐射等问题,在一些特殊场合如易燃、易爆、受电磁干扰较大等的场合,即使经过防爆处理,也难免存在危险,因此这类搬运车的应用受到限制。同时,依靠主动车轮的差速控制实现转向和依靠从动车轮的转向控制方向实施时占用空间较大,在一些狭小场合难以应用;车体自转时,因电动机的精度问题,在一些对于转向精度有要求的精密加工或装配场合,通用的搬运车难以满足要求。
发明内容
为解决上述搬运车中的问题,本发明提出一种高精度转向控制的气动搬运车及其转向控制方法。
本发明所采用的技术方案:
包括载物台、车架、车轮、抬升气缸组件、抬升推板、后驱动气缸支持座、后驱动气缸、气动螺旋转向驱动器、前车轮轴、前棘爪盘、前棘轮齿轮、前传动齿轮、前驱动齿条、后驱动齿条、后传动齿轮、后棘爪盘、后车轮轴、后棘轮齿轮、前驱动气缸和前驱动气缸支持座。
所述载物台螺钉连接在车架上,车轮分别配合连接在前车轮轴和后车轮轴两端;所述抬升气缸组件包括气缸主体、螺母,所述抬升气缸组件装卡在载物台和车架之间,在车架的横梁上设置有沉孔,其与放置抬升气缸组件端部配合连接的螺母配合,通过转动螺母调节抬升气缸组件裝卡的预紧力;所述抬升推板焊接在抬升气缸组件的活塞杆端部;所述后驱动气缸固定放置在后驱动气缸支持座上,后驱动气缸支持座螺钉连接在车架上;所述气动螺旋转向驱动器螺栓连接在载物台的下表面上;所述前车轮轴配合连接在车架上,其上嵌套有前棘爪盘;所述前棘轮齿轮内置轴承配合连接在前车轮轴上,其上设置的棘爪槽与前棘爪盘配合嵌套;所述前传动齿轮轴承连接在车架设置的前凸起上,并与前棘轮齿轮上设置的齿轮段啮合;所述前驱动齿条焊接在前驱动气缸的活塞杆端部,运动时与前传动齿轮进行啮合;所述后驱动齿条焊接在后驱动气缸的活塞杆端部,运动时与后传动齿轮啮合;所述后传动齿轮轴承连接在车架设置的后凸起上;所述后棘爪盘嵌套在后车轮轴上,与后棘轮齿轮配合;所述后棘轮齿轮结构与前棘轮齿轮相同,其内置轴承配合连接在后车轮轴上与后传动齿轮啮合;所述前驱动气缸固定放置在前驱动气缸支持座上;所述前驱动气缸支持座螺钉连接在车架上。
所述气动螺旋转向驱动器包括法兰盘空心螺杆、密封圈、活塞杆、激振法兰螺母、密封端盖;所述法兰盘空心螺杆其上设置有腔体、螺杆外螺纹、连接螺纹孔,所述腔体被活塞杆分成前腔和后腔,用以为驱动气体提供密闭环境;所述螺杆外螺纹与激振法兰螺母旋合连接,所述连接螺纹孔用以固定密封端盖;所述密封圈嵌套在活塞杆上的凹槽内;所述活塞杆另一端设置有外螺纹,螺纹连接在激振法兰螺母内部;所述活塞杆内部还设置有两个通气孔,一个与前腔相通,另一个与后腔相通;所述激振法兰螺母为d31激振模式法兰螺母、d33激振模式法兰螺母、d15激振模式法兰螺母的其中一种。
所述激振法兰螺母可为d31激振模式法兰螺母,其上设置有振动腔体一,所述振动腔体一外表面设置有粘贴平面,所述粘贴平面个数为2n个,n为大于1的整数,在本具体实施方式中n为6,其上粘贴有压电片,以使振动腔体一产生轴向振动;所述d31激振模式法兰螺母上还设置有两个气孔一,分别与活塞杆内部的两个通气孔联通;所述d31激振模式法兰螺母设置的内螺纹一与螺杆外螺纹旋合连接;所述d31激振模式法兰螺母设置的螺纹孔一与活塞杆设置的外螺纹配合连接;所述d31激振模式法兰螺母还设置有固定通孔一用以与载物台固定。
所述密封端盖为凸台结构,其上设置有外橡胶垫圈、内橡胶垫圈、连接螺栓;所述外橡胶垫圈置于密封端盖与法兰盘空心螺杆之间,所述内橡胶垫圈置于密封端盖与活塞杆之间,进而完成了腔体的密闭;所述连接螺栓与连接螺纹孔配合完成密封端盖的固定。
所述激振法兰螺母可为d33激振模式法兰螺母。所述d33激振模式法兰螺母,其上设置有保持架一、振动腔体二、压电堆叠,所述压电堆叠设置于保持架一与振动腔体二之间,以使振动腔体二产生径向振动,其个数为2n个,n为大于1的整数,在本具体实施方式中n为2;所述d33激振模式法兰螺母上还设置有两个通气孔二,分别与活塞杆内部的两个通气孔联通;所述d33激振模式法兰螺母设置的内螺纹二与螺杆外螺纹旋合连接;所述d33激振模式法兰螺母设置的螺纹孔二与活塞杆设置的外螺纹配合连接;所述d33激振模式法兰螺母还设置有固定通孔二用以与载物台固定。
所述激振法兰螺母可为d15激振模式法兰螺母;所述d15激振模式法兰螺母设置有保持架二、振动腔体三,所述d15激振模式法兰螺母设置的剪切式压电陶瓷粘贴于保持架二与振动腔体三之间,以使振动腔体三产生轴向振动,其个数为2n个,n为大于1的整数,在本具体实施方式中n为2;所述d15激振模式法兰螺母上还设置有两个通气孔三,分别与活塞杆内部的两个通气孔联通;所述d15激振模式法兰螺母设置的内螺纹三与螺杆外螺纹旋合连接;所述d15激振模式法兰螺母设置的螺纹孔三与活塞杆设置的外螺纹配合连接;所述d15激振模式法兰螺母还设置有固定通孔三用以与载物台固定。
所述一种高精度转向控制的气动搬运车转向控制方法为:气动搬运车到达预定位置时,首先给气动螺旋转向驱动器供气,气压足够后给激振法兰螺母通电,激振法兰螺母振动基于超声减摩原理使螺纹副解锁,从而在气压作用和螺纹导向下法兰盘空心螺杆旋转着向下伸出,法兰盘空心螺杆下端面碰触地面后将支撑起整个车体进行转动,直至转动到设定角度时,使激振法兰螺母断电,其停止振动后螺纹副立刻自锁,锁定当前转角,随后给抬升气缸组件供气,抬升气缸组件推动抬升推板向下移动至法兰盘空心螺杆离地,停止供气,然后给气动螺旋转向驱动器供反向气压,气压足够后给激振法兰螺母通电,激振法兰螺母振动使螺纹副解锁,从而在气压作用和螺纹导向下法兰盘空心螺杆旋转着向上缩回,至极限位置后断电断气,同时给抬升气缸组件供反向气压,抬升气缸组件拉动抬升推板回位,直至车轮完全接触地面时停止供气,完成整个转向过程。
所述一种高精度转向控制的气动搬运车运动控制方法为:所述运动控制方法为后驱动气缸缩回使处于啮合状态的后驱动齿条和后传动齿轮联动,前驱动气缸伸长使前驱动齿条和前传动齿轮分离;运行时,给后驱动气缸供气,活塞伸长推动后驱动齿条移动,通过传动齿轮15将动力传递给后棘轮齿轮,通过棘轮棘爪结构将动力传递到车轮上,使车轮转动,驱动小车向前运动,后驱动气缸活塞杆回缩时,因棘轮机构作用,动力不传递给车轮;反向时,使后驱动气缸活塞杆处于伸长状态时停止供气,转而对前驱动气缸供气,本来处于伸长状态的前驱动气缸活塞杆回缩使前驱动齿条和前传动齿轮啮合运动,将动力通过前棘轮齿轮上设置的棘轮棘爪机构传递到车轮上,使车轮反向运动,从而带动小车倒退运动。
综合以上所述内容,本发明提供了一种高精度转向控制的气动搬运车及其转向控制方法,以解决当前搬运类小车转向精度低、难以适用于特殊场合的问题。本发明利用压电超声振动控制螺纹副自锁解锁,结合压缩空气提供动力,实现法兰盘空心螺杆的旋转直线运动和制动;通过对抬升气缸和气动螺旋转向驱动器的交替供气控制,从而实现搬运车的精确转向。同时本发明采用压缩空气驱动小车运行,避免了电磁辐射、电火花的产生。本发明具有转向精度高、响应速度快、结构简单无污染等优点,可广泛应用于在危险场合物品的搬运。
附图说明
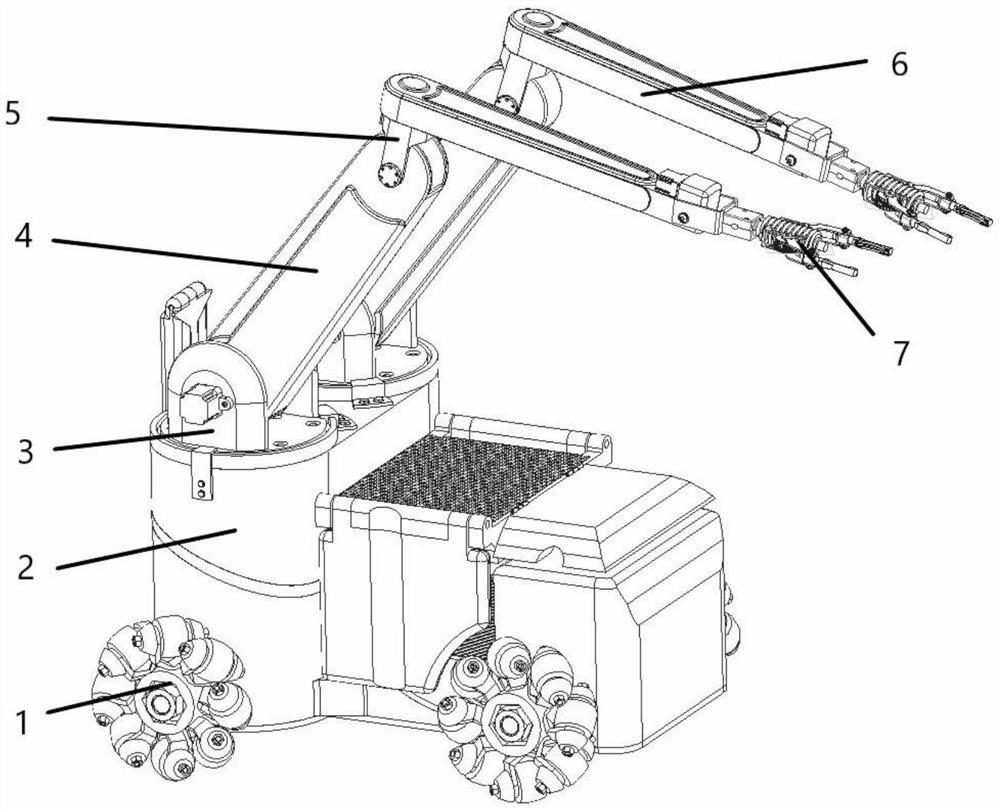
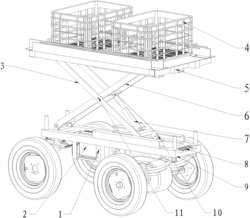
图1所示为本发明提出的一种高精度转向控制的气动搬运车的三维整体结构示意图;
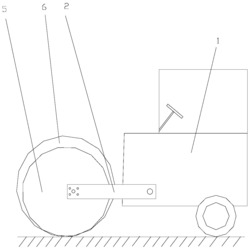
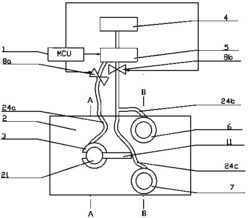
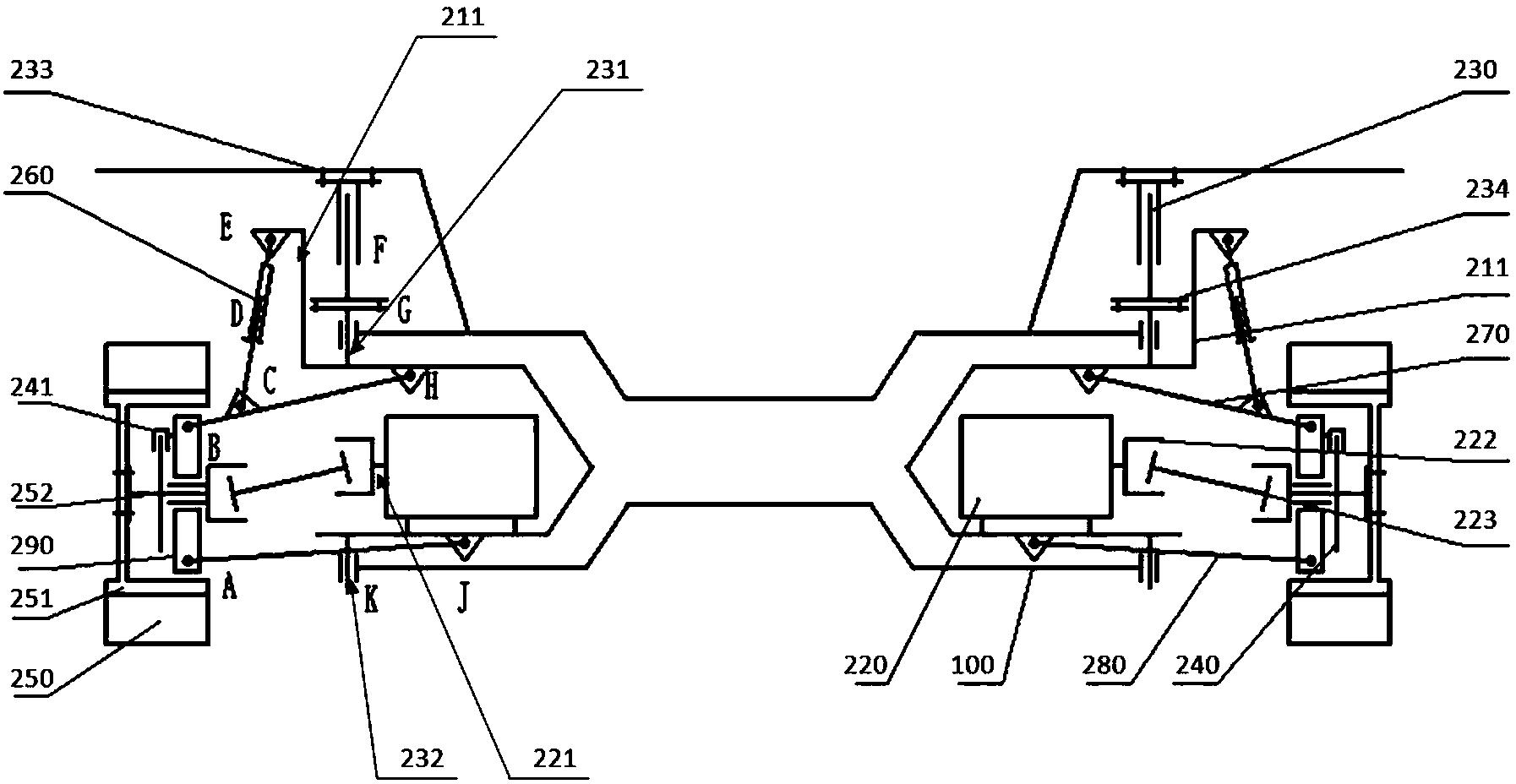
图2所示为本发明提出的一种高精度转向控制的气动搬运车的后向剖视结构示意图;
图3所示为本发明提出的一种高精度转向控制的气动搬运车的前向剖视结构示意图;
图4所示为本发明提出的一种高精度转向控制的气动搬运车的车架装配示意图;
图5所示为本发明提出的一种高精度转向控制的气动搬运车的抬升气缸组件结构示意图;
图6所示为本发明提出的一种高精度转向控制的气动搬运车的抬升推板结构示意图;
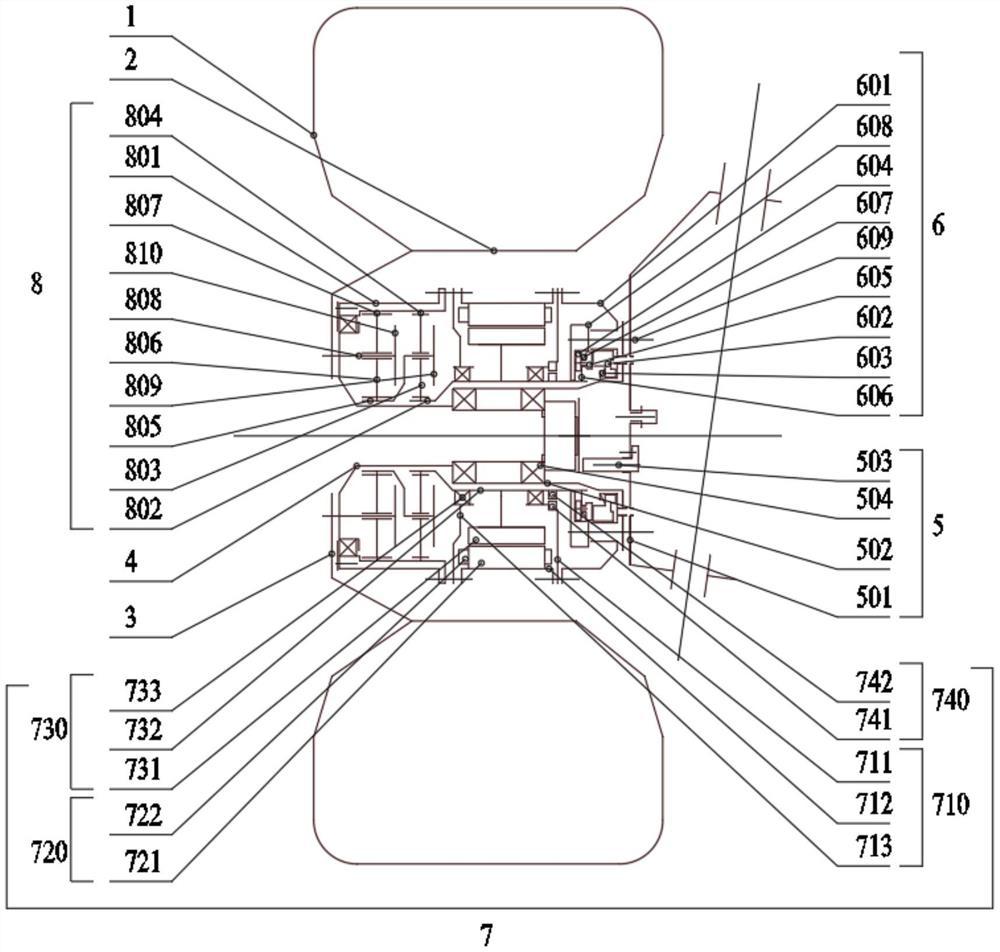
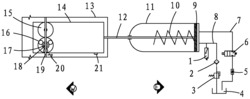
图7所示为本发明提出的一种高精度转向控制的气动搬运车的气动螺旋转向驱动器结构示意图;
图8所示为本发明提出的一种高精度转向控制的气动搬运车的法兰盘空心螺杆结构示意图;
图9所示为本发明提出的一种高精度转向控制的气动搬运车的活塞杆结构示意图;
图10所示为本发明提出的一种高精度转向控制的气动搬运车的密封端盖结构示意图;
图11所示为本发明提出的一种高精度转向控制的气动搬运车的腔体结构示意图;
图12所示为本发明提出的一种高精度转向控制的气动搬运车的d31激振模式法兰螺母结构示意图;
图13所示为本发明提出的一种高精度转向控制的气动搬运车的d31激振模式法兰螺母结构剖视图;
图14所示为本发明提出的一种高精度转向控制的气动搬运车的前棘轮齿轮结构示意图;
图15所示为本发明提出的一种高精度转向控制的气动搬运车的d33激振模式法兰螺母结构示意图;
图16所示为本发明提出的一种高精度转向控制的气动搬运车的d33激振模式法兰螺母结构剖视图;
图17所示为本发明提出的一种高精度转向控制的气动搬运车的d15激振模式法兰螺母结构示意图;
图18所示为本发明提出的一种高精度转向控制的气动搬运车的d15激振模式法兰螺母结构剖视图。
具体实施方式
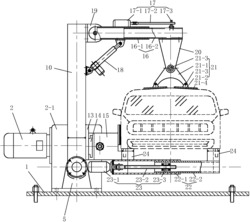
具体实施方式一:结合图1~图14说明本具体实施方式。本实施方式提供了一种高精度转向控制的气动搬运车的具体实施方案;所述一种高精度转向控制的气动搬运车包括载物台1、车架2、车轮3、抬升气缸组件4、抬升推板5、后驱动气缸支持座6、后驱动气缸7、气动螺旋转向驱动器8、前车轮轴9、前棘爪盘10、前棘轮齿轮11、前传动齿轮12、前驱动齿条13、后驱动齿条14、后传动齿轮15、后棘爪盘16、后车轮轴17、后棘轮齿轮18、前驱动气缸19和前驱动气缸支持座20。
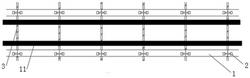
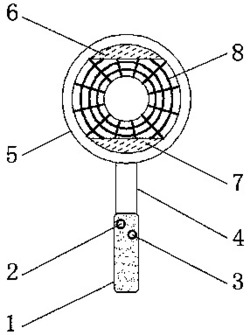
所述载物台1螺钉连接在车架2上,车轮3分别配合连接在前车轮轴9和后车轮轴17两端;所述抬升气缸组件4包括气缸主体4-1、螺母4-2,所述抬升气缸组件4装卡在载物台1和车架2之间,在车架2的横梁上设置有沉孔2-1,其与放置抬升气缸组件4端部配合连接的螺母4-2配合,通过转动螺母4-2调节抬升气缸组件4裝卡的预紧力;所述抬升推板5焊接在抬升气缸组件4的活塞杆端部;所述后驱动气缸7固定放置在后驱动气缸支持座6上,后驱动气缸支持座6螺钉连接在车架2上;所述气动螺旋转向驱动器8螺栓连接在载物台1的下表面上;所述前车轮轴9配合连接在车架2上,其上嵌套有前棘爪盘10;所述前棘轮齿轮11内置轴承配合连接在前车轮轴9上,其上设置的棘爪槽11-1与前棘爪盘10配合嵌套;所述前传动齿轮12轴承连接在车架2设置的前凸起2-2上,并与前棘轮齿轮11上设置的齿轮段11-2啮合;所述前驱动齿条13焊接在前驱动气缸19的活塞杆端部,运动时与前传动齿轮12进行啮合;所述后驱动齿条14焊接在后驱动气缸7的活塞杆端部,运动时与后传动齿轮15啮合;所述后传动齿轮15轴承连接在车架2设置的后凸起2-3上;所述后棘爪盘16嵌套在后车轮轴17上,与后棘轮齿轮18配合;所述后棘轮齿轮18结构与前棘轮齿轮11相同,其内置轴承配合连接在后车轮轴17上与后传动齿轮15啮合;所述前驱动气缸19固定放置在前驱动气缸支持座20上;所述前驱动气缸支持座20螺钉连接在车架2上。
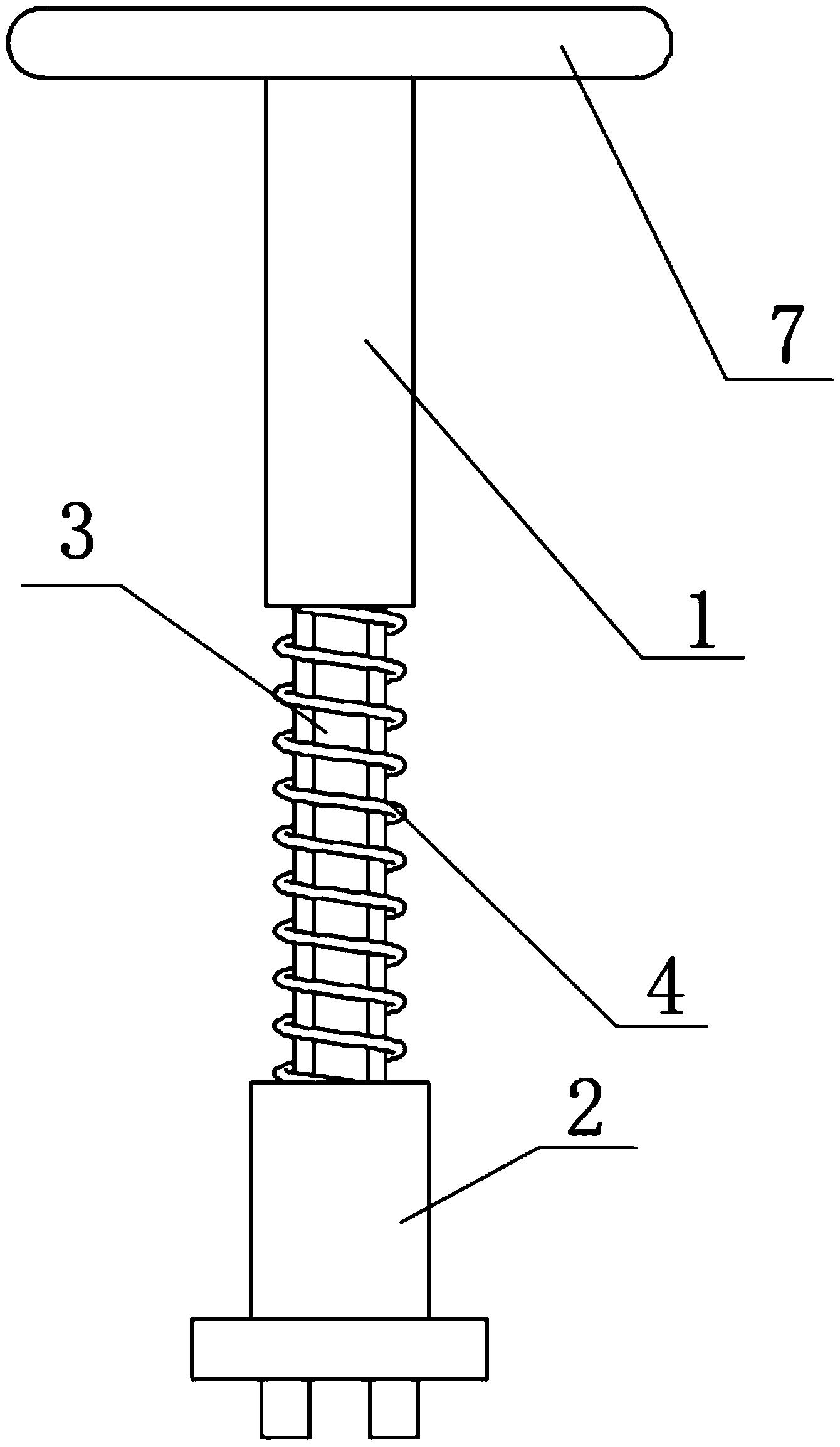
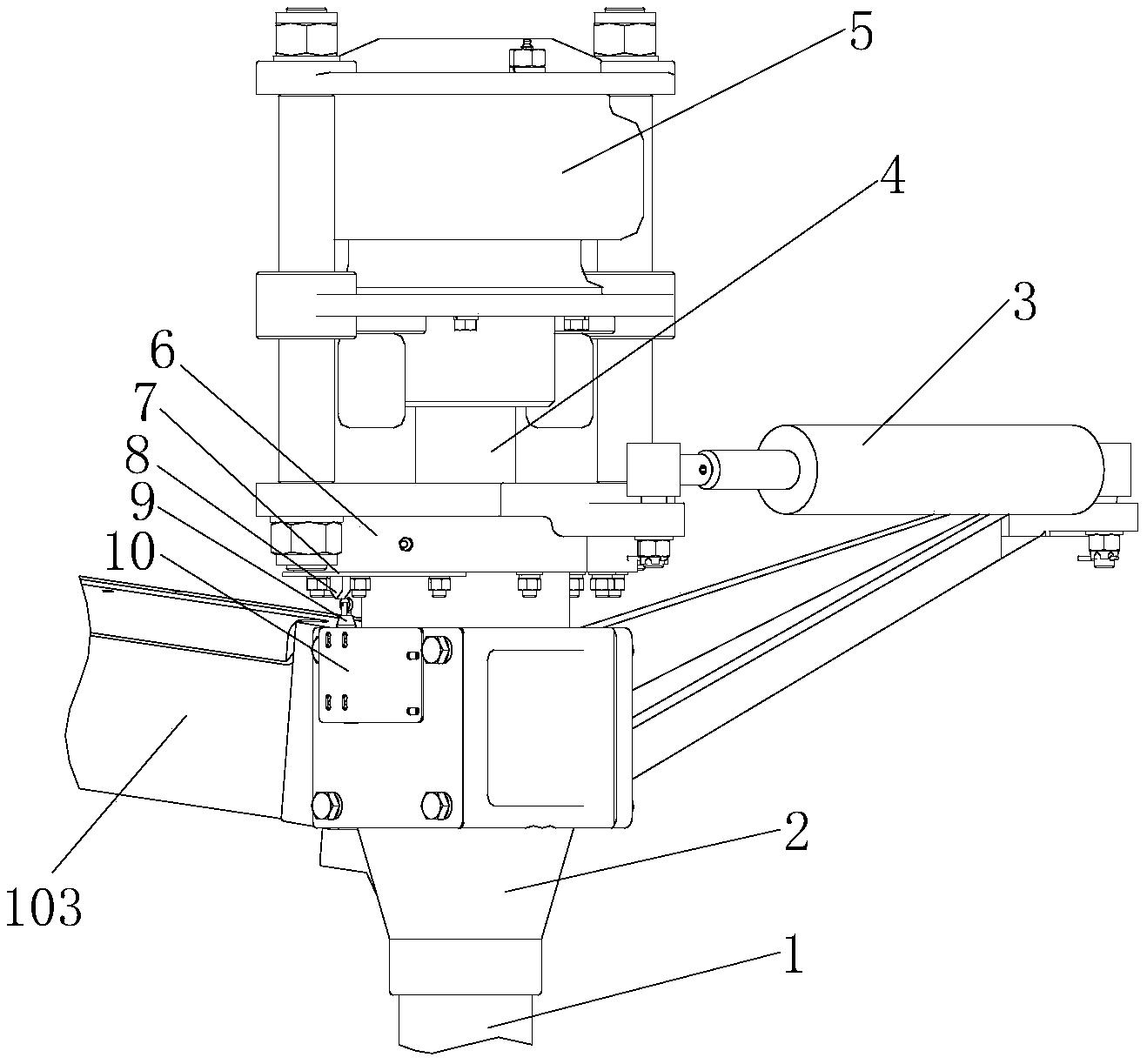
所述气动螺旋转向驱动器8包括法兰盘空心螺杆8-1、密封圈8-2、活塞杆8-3、激振法兰螺母8-4、密封端盖8-5;所述法兰盘空心螺杆8-1其上设置有腔体8-1-1、螺杆外螺纹8-1-2、连接螺纹孔8-1-3,所述腔体8-1-1被活塞杆8-3分成前腔8-1-1-1和后腔8-1-1-2,用以为驱动气体提供密闭环境;所述螺杆外螺纹8-1-2与激振法兰螺母8-4旋合连接,所述连接螺纹孔8-1-3用以固定密封端盖8-5;所述密封圈8-2嵌套在活塞杆8-3上的凹槽8-3-1内;所述活塞杆8-3另一端设置有外螺纹8-3-2,螺纹连接在激振法兰螺母8-4内部;所述活塞杆8-3内部还设置有两个通气孔8-3-3,一个与前腔8-1-1-1相通,另一个与后腔8-1-1-2相通;所述激振法兰螺母8-4为d31激振模式法兰螺母8-400、d33激振模式法兰螺母8-401、d15激振模式法兰螺母8-402的其中一种。
所述激振法兰螺母8-4可为d31激振模式法兰螺母8-400,其上设置有振动腔体一8-400-1,所述振动腔体一8-400-1外表面设置有粘贴平面8-400-2,所述粘贴平面8-400-2个数为2n个,n为大于1的整数,在本具体实施方式中n为6,其上粘贴有压电片8-400-3,以使振动腔体一8-400-1产生轴向振动;所述d31激振模式法兰螺母8-400上还设置有两个气孔一8-400-4,分别与活塞杆8-3内部的两个通气孔8-3-3联通;所述d31激振模式法兰螺母8-400设置的内螺纹一8-400-5与螺杆外螺纹8-1-2旋合连接;所述d31激振模式法兰螺母8-400设置的螺纹孔一8-400-6与活塞杆8-3设置的外螺纹8-3-2配合连接;所述d31激振模式法兰螺母8-400还设置有固定通孔一8-400-7用以与载物台1固定。
所述密封端盖8-5为凸台结构,其上设置有外橡胶垫圈8-5-1、内橡胶垫圈8-5-2、连接螺栓8-5-3;所述外橡胶垫圈8-5-1置于密封端盖8-5与法兰盘空心螺杆8-1之间,所述内橡胶垫圈8-5-2置于密封端盖8-5与活塞杆8-3之间,进而完成了腔体8-1-1的密闭;所述连接螺栓8-5-3与连接螺纹孔8-1-3配合完成密封端盖8-5的固定。
具体实施方式二:结合图15~图16说明本具体实施方式。本具体实施方式与具体实施方式一的区别在于:所述激振法兰螺母8-4可为d33激振模式法兰螺母8-401;所述d33激振模式法兰螺母8-401,其上设置有保持架一8-401-1、振动腔体二8-401-2、压电堆叠8-401-3,所述压电堆叠8-401-3设置于保持架一8-401-1与振动腔体二8-401-2之间,以使振动腔体二8-401-2产生径向振动,其个数为2n个,n为大于1的整数,在本具体实施方式中n为2;所述d33激振模式法兰螺母8-401上还设置有两个通气孔二8-401-4,分别与活塞杆8-3内部的两个通气孔8-3-3联通;所述d33激振模式法兰螺母8-401设置的内螺纹二8-401-5与螺杆外螺纹8-1-2旋合连接;所述d33激振模式法兰螺母8-401设置的螺纹孔二8-401-6与活塞杆8-3设置的外螺纹8-3-2配合连接;所述d33激振模式法兰螺母8-401还设置有固定通孔二8-401-7用以与载物台1固定。
具体实施方式三:结合图17~图18说明本具体实施方式。本具体实施方式与具体实施方式一的区别在于:所述激振法兰螺母8-4可为d15激振模式法兰螺母8-402;所述d15激振模式法兰螺母8-402设置有保持架二8-402-1、振动腔体三8-402-2,所述d15激振模式法兰螺母8-402设置的剪切式压电陶瓷8-402-3粘贴于保持架二8-402-1与振动腔体三8-402-2之间,以使振动腔体三8-402-2产生轴向振动,其个数为2n个,n为大于1的整数,在本具体实施方式中n为2;所述d15激振模式法兰螺母8-402上还设置有两个通气孔三8-402-4,分别与活塞杆8-3内部的两个通气孔8-3-3联通;所述d15激振模式法兰螺母8-402设置的内螺纹三8-402-5与螺杆外螺纹8-1-2旋合连接;所述d15激振模式法兰螺母8-402设置的螺纹孔三8-402-6与活塞杆8-3设置的外螺纹8-3-2配合连接;所述d15激振模式法兰螺母8-402还设置有固定通孔三8-402-7用以与载物台1固定。
具体实施方式四:结合图1~图18说明本具体实施方式。本实施方式提供了一种高精度转向控制的气动搬运车转向控制方法的具体实施方案;所述一种高精度转向控制的气动搬运车转向控制方法为:气动搬运车到达预定位置时,首先给气动螺旋转向驱动器8供气,气压足够后给激振法兰螺母8-4通电,激振法兰螺母8-4振动基于超声减摩原理使螺纹副解锁,从而在气压作用和螺纹导向下法兰盘空心螺杆8-1旋转着向下伸出,法兰盘空心螺杆8-1下端面碰触地面后将支撑起整个车体进行转动,直至转动到设定角度时,使激振法兰螺母8-4断电,其停止振动后螺纹副立刻自锁,锁定当前转角,随后给抬升气缸组件4供气,抬升气缸组件4推动抬升推板5向下移动至法兰盘空心螺杆8-1离地,停止供气,然后给气动螺旋转向驱动器8供反向气压,气压足够后给激振法兰螺母8-4通电,激振法兰螺母8-4振动使螺纹副解锁,从而在气压作用和螺纹导向下法兰盘空心螺杆8-1旋转着向上缩回,至极限位置后断电断气,同时给抬升气缸组件4供反向气压,抬升气缸组件4拉动抬升推板5回位,直至车轮3完全接触地面时停止供气,完成整个转向过程。
具体实施方式五:结合图1~图18说明本具体实施方式。本实施方式提供了一种高精度转向控制的气动搬运车运动控制方法的具体实施方案;所述一种高精度转向控制的气动搬运车运动控制方法为:所述运动控制方法为后驱动气缸7缩回使处于啮合状态的后驱动齿条14和后传动齿轮15联动,前驱动气缸19伸长使前驱动齿条13和前传动齿轮12分离;运行时,给后驱动气缸7供气,活塞伸长推动后驱动齿条14移动,通过传动齿轮15将动力传递给后棘轮齿轮18,通过棘轮棘爪结构将动力传递到车轮上,使车轮转动,驱动小车向前运动,后驱动气缸7活塞杆回缩时,因棘轮机构作用,动力不传递给车轮;反向时,使后驱动气缸7活塞杆处于伸长状态时停止供气,转而对前驱动气缸19供气,本来处于伸长状态的前驱动气缸19活塞杆回缩使前驱动齿条13和前传动齿轮12啮合运动,将动力通过前棘轮齿轮11上设置的棘轮棘爪机构传递到车轮上,使车轮反向运动,从而带动小车倒退运动。
综合以上所述内容,本发明提供了一种高精度转向控制的气动搬运车及其转向控制方法,以解决当前搬运类小车转向精度低、难以适用于特殊场合的问题。本发明利用压电超声振动控制螺纹副自锁解锁,结合压缩空气提供动力,实现法兰盘空心螺杆的旋转直线运动和制动;通过对抬升气缸和气动螺旋转向驱动器的交替供气控制,从而实现搬运车的精确转向。同时本发明采用压缩空气驱动小车运行,避免了电磁辐射、电火花的产生。本发明具有转向精度高、响应速度快、结构简单无污染等优点,可广泛应用于在危险场合物品的搬运。
一种高精度转向控制的气动搬运车及其转向控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0