





专利摘要
本发明公开一种仿生水黾机器人,其特征在于该机器人模仿生物水黾的结构布局,主要包括机架、对称安装在机架上的前后四条支撑腿和中间左右两条划水腿、舵机组件和控制电路,所述划水腿包括划水腿划水机构和划水腿抬腿机构,所述舵机组件包括划水舵机组件和抬腿舵机组件;所述支撑腿包括依次连接的上连接杆、中连接杆和漂浮支撑腿,上连接杆与机架连接;所述划水腿划水机构为四杆机构;所述划水腿抬腿机构为平行四边形机构;所述划水腿划水机构与所述划水腿抬腿机构串联安装,并通过控制机构相互配合运动。
说明书
技术领域
本发明涉及机器人技术,具体为一种可在水面上行走的仿生水黾机器人。
背景技术
仿生技术研究是当今机器人研究领域内的前沿课题,模拟各种生物在各种特定条件下的卓越功能,制造出可以代替人类从事恶劣环境下工作的仿生机器人,是研究的最终目标。
各国学者对仿水黾的水上机器人进行了大量研究。卡内基梅隆大学、哥伦比亚大学、麻省理工大学和清华大学(吴立成等,水上漂浮仿生水黾机器人,ZL200610112601.7,清华大学,2006)等都研制出了仿生水黾机器人,其划水腿和支撑腿由金属丝涂特殊防水材料弯制而成,主要利用水的表面张力支撑机器人漂浮于水面,不利于携带负载进行工作。利用水的浮力支撑机器人漂浮于水面的仿水黾机器人国内外也有所研究。河北工业大学高铁红教授课题组研制的一款仿水黾机器人(高铁红,仿水黾机器人机构及性能分析研究:[博士论文],河北工业大学,2008),采用了3个微小电磁铁作为驱动器,驱动三自由度输入并联解耦划水驱动机构实现划水运动,支撑腿采用聚氨酯材料制作成圆柱体,利用其所受浮力支撑机器人浮于水面。该机器人由于受到微小电磁铁行程及复位弹簧弹性恢复力的影响,划水速度受到限制。
发明内容
针对现有技术的不足,本发明拟解决的技术问题是,提供一种仿生水黾机器人,该机器人模仿生物水黾的结构和运动机理设计,采用水的浮力支撑机器人,具有水上运动负载能力强,移动速度快,划水效率高等特点。
本发明解决所述技术问题的技术方案是,设计一种仿生水黾机器人,其特征在于该机器人模仿生物水黾的结构布局,主要包括机架、对称安装在机架上的前后四条支撑腿和中间左右两条划水腿、舵机组件和控制电路,所述划水腿包括划水腿划水机构和划水腿抬腿机构,所述舵机组件包括划水舵机组件和抬腿舵机组件;
所述支撑腿包括依次连接的上连接杆、中连接杆和漂浮支撑腿,上连接杆与机架连接;
所述划水腿划水机构为四杆机构,包含第一划水杆、第二划水杆、第三划水杆及机架,第一划水杆的一端经划水舵机臂与划水舵机输出轴连接,第一划水杆的另一端与第二划水杆的一端、第二划水杆的另一端与第三划水杆的一端、以及第三划水杆的另一端与机架之间均为旋转副连接;
所述划水腿抬腿机构为平行四边形机构,包含第一抬腿杆、第二抬腿杆、连接板和划水板,第一抬腿杆一端经抬腿舵机臂与抬腿舵机连接,抬腿舵机经舵机支撑架与连接板连接,第一抬腿杆的另一端与划水板的一端,划水板的另一端与第二抬腿杆的一端、第二抬腿杆的另一端与连接板之间均通过旋转副连接,所述旋转副为微小轴承及销轴制作而成;
所述划水舵机组件包括划水舵机、划水舵机支撑架和划水舵机臂,划水舵机经舵机支撑架连接到机架上,划水舵机臂分别与划水腿划水机构和划水舵机连接;所述抬腿舵机组件包括抬腿舵机、抬腿舵机支撑架和抬腿舵机臂,抬腿舵机经抬腿舵机支撑架与划水腿抬腿机构连接,抬腿舵机臂分别与划水腿抬腿机构和抬腿舵机连接。
与现有技术相比,本发明仿生水黾机器人具有结构简单,水上运动负载能力强,移动速度快,划水效率高等特点。
附图说明
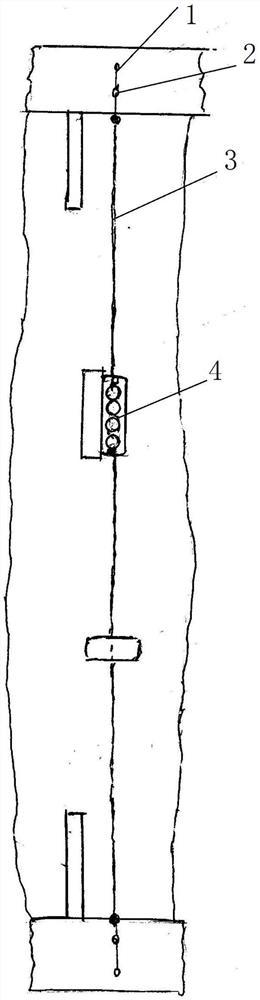
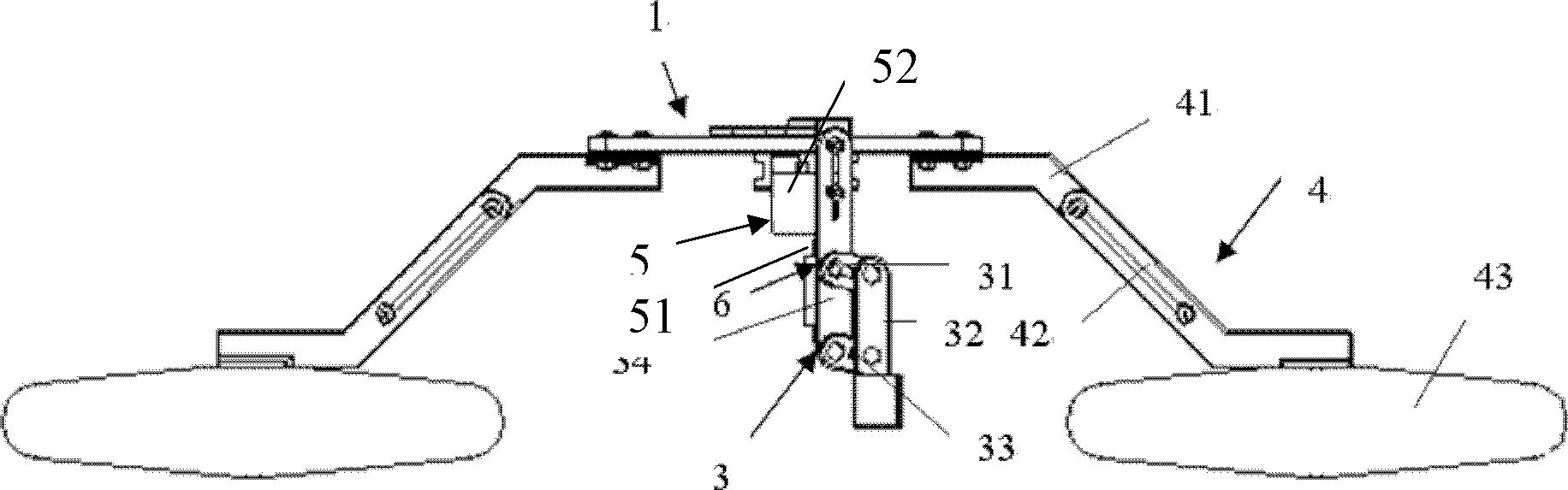
图1为本发明仿生水黾机器人一种实施例的整体结构主视结构示意图;
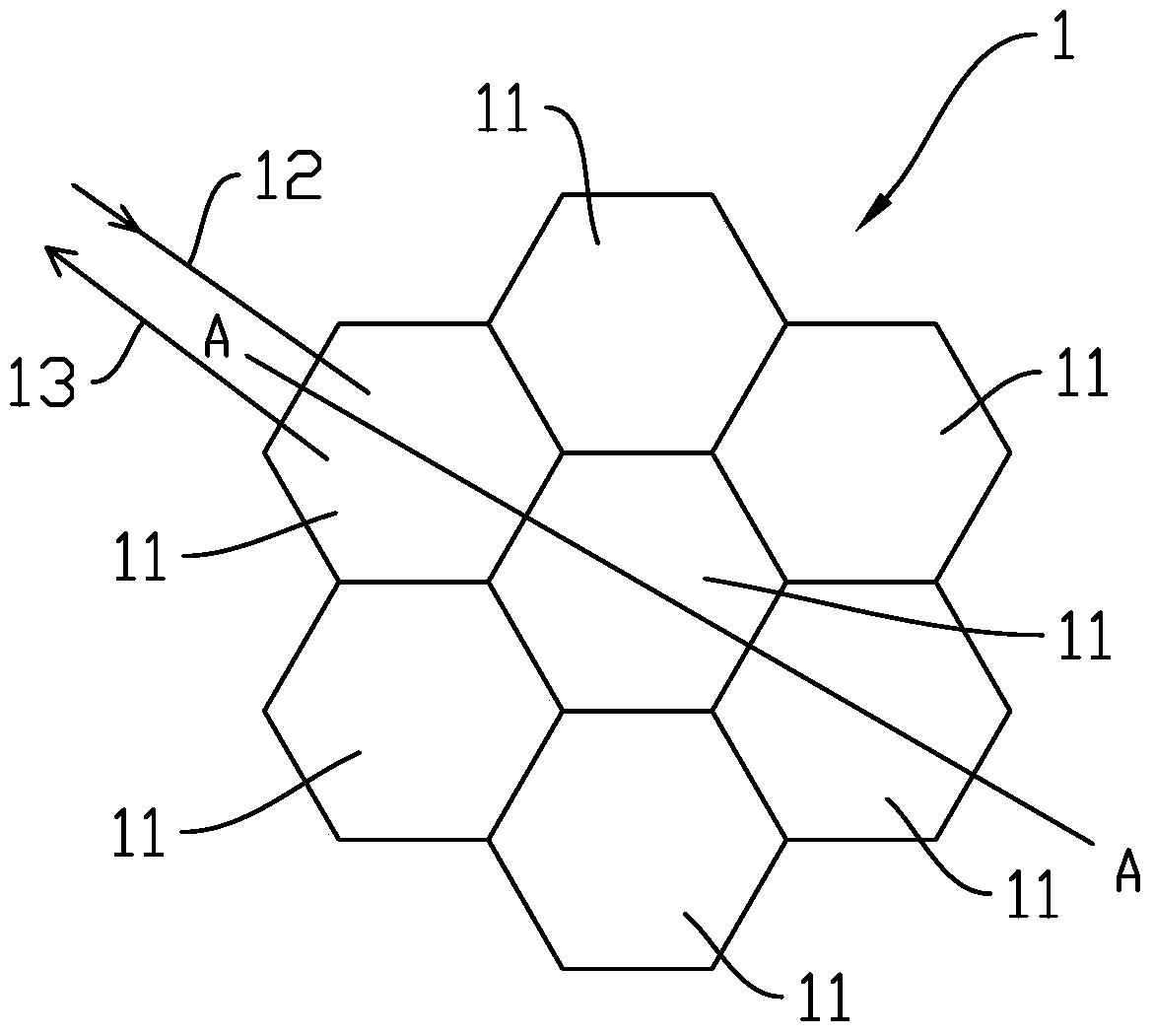
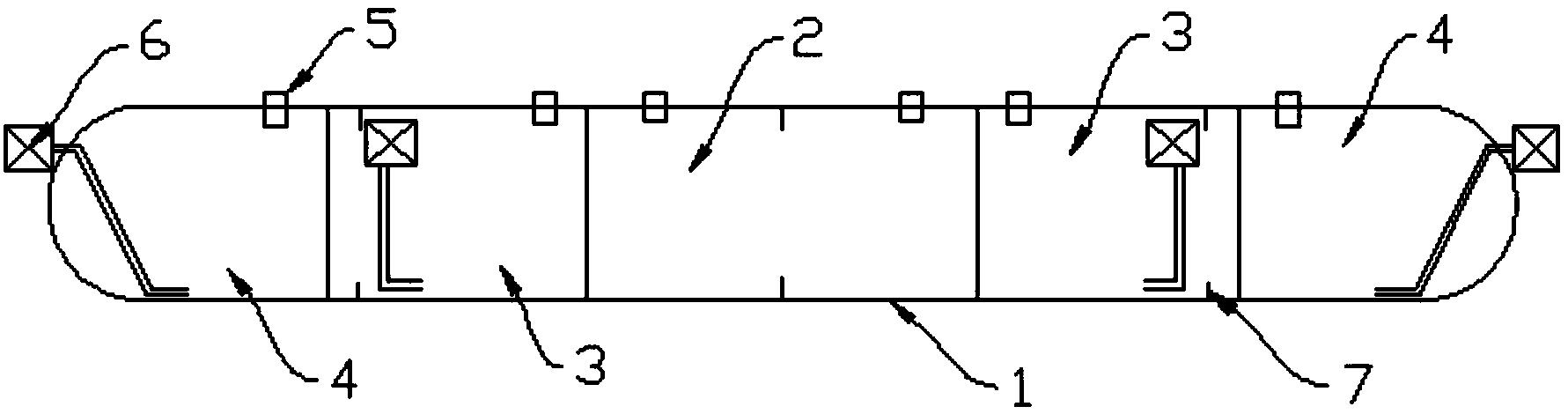
图2为本发明仿生水黾机器人一种实施例的整体结构俯视结构示意图;
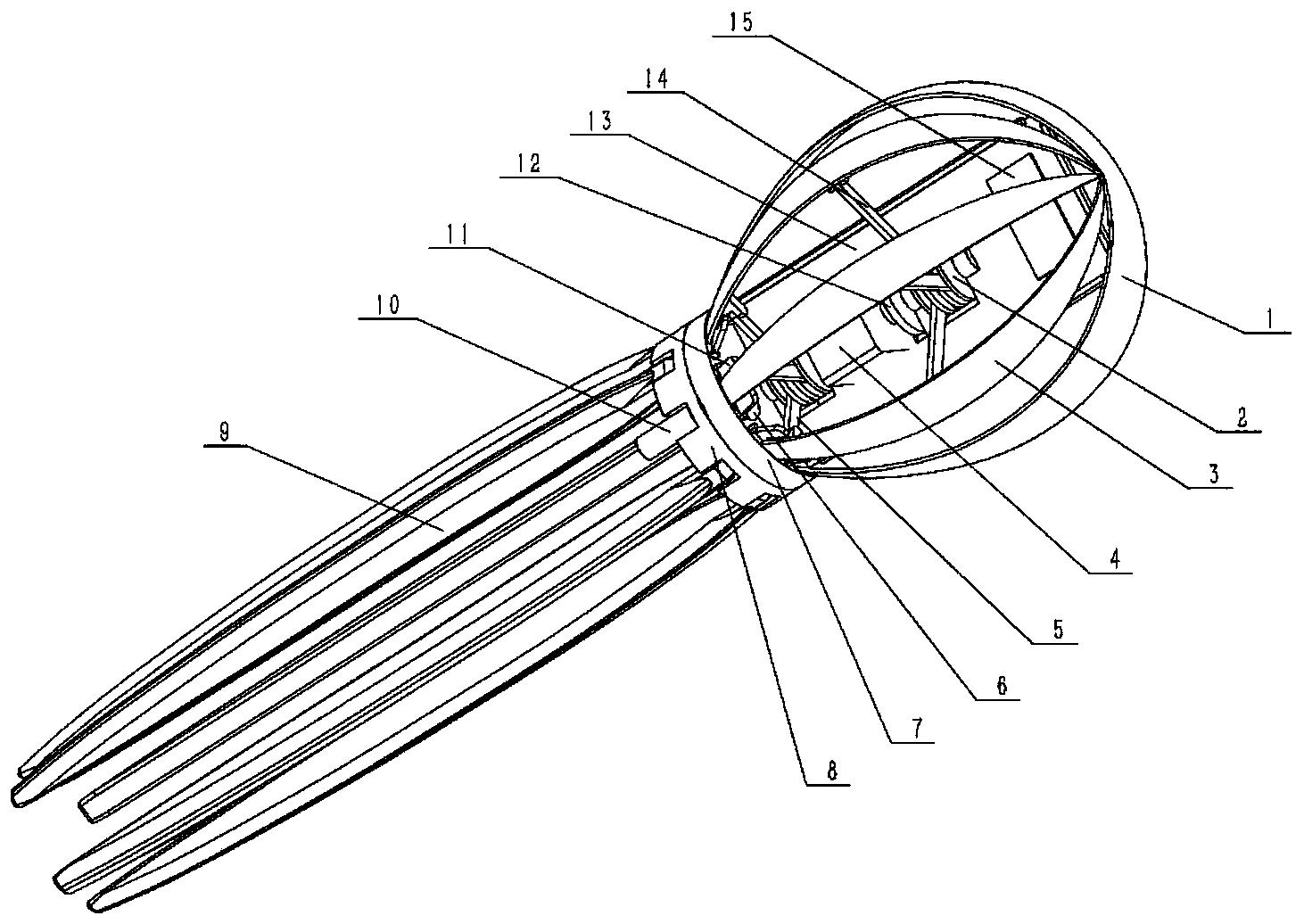
图3为本发明仿生水黾机器人一种实施例的整体结构左视结构示意图;
图4为本发明仿生水黾机器人一种实施例的划水腿划水机构结构示意图,其中,图4(1)为划水腿划水机构主视结构示意图,图4(2)为划水腿划水机构主视结构中的局部结构放大示意图;图4(3)为划水腿划水机构俯视结构示意图;
图5为本发明仿生水黾机器人一种实施例的划水腿抬腿机构结构示意图,其中,图5(1)为划水腿抬腿机构主视结构图,图5(2)为划水腿抬腿机构左视结构图;图5(3)为划水腿抬腿机构左视结构中的局部结构放大示意图;
图6为本发明仿生水黾机器人一种实施例的划水腿抬腿机构中的第一抬腿杆31结构示意图;其中,图6(1)为第一抬腿杆31的主视图,图6(2)为第一抬腿杆31的左视图;
图7为本发明仿生水黾机器人一种实施例的舵机组件6中的抬腿舵机臂63结构示意图;其中,图7(1)为抬腿舵机臂63结构的主视图,图7(2)为抬腿舵机臂63结构的左视图。
具体实施方式
下面结合实施例及其附图进一步叙述本发明:
本发明设计的仿生水黾机器人(简称机器人,参见图1-7),其特征在于该机器人模仿生物水黾的结构布局,主要包括机架和对称安装在机架上的前后四条支撑腿4和中间左右两条划水腿,以及舵机组件和控制电路。所述划水腿包括划水腿划水机构2和划水腿抬腿机构3。
所述机架1为矩形板。机架1可选用碳纤维板、塑料或有机玻璃材料制造。
所述舵机组件包括划水舵机组件5和抬腿舵机组件6。所述划水舵机组件5包括划水舵机51、划水舵机支撑架52和划水舵机臂53。划水舵机51胶结到舵机支撑架52上,划水舵机支撑架52胶结到机架1上,划水舵机臂53分别与划水腿划水机构2的划水杆21和划水舵机51的输出轴连接。所述抬腿舵机组件6包括抬腿舵机61、抬腿舵机支撑架62和抬腿舵机臂63。抬腿舵机61胶结到抬腿舵机支撑架62上,抬腿舵机支撑架62胶结到划水腿抬腿机构3的连接板34上,抬腿舵机臂63分别与划水腿抬腿机构3的抬腿杆31和抬腿舵机61的输出轴连接。
本发明实施例采用的所述划水舵机51和抬腿舵机61,也可选用微小控制电机来替代,如采用微小伺服电机或微小步进电机等,相应安装结构略有变动,其余机构不变。
所述支撑腿4包括四个,结构一致,每个支撑腿包括上连接杆41、中连接杆42和漂浮支撑腿43;上连接杆41的一端与机架1通过螺钉连接,上连接杆41的另一端与中连接杆42的一端连接,中连接杆42的另一端与漂浮支撑腿43胶合连接。漂浮支撑腿43的垂直和水平投影形状均近似为椭圆形的流线型形状,以减小机器人划行时所受水阻力;漂浮支撑腿43采用聚氨酯材料或者其它性能相似的材料制作,取材方便、重量较轻、容易加工。所述四个支撑腿两个一组,对称安装在机架1的前后两边,构成仿生水黾机器人的前后四条腿,用于稳定支撑机架1及其负载漂浮在水面上(参见图1、2、3)。
为了使支撑腿的长度可方便调节,本发明的进一步特征是在上连接杆41上和中连接杆42上分别设有调节长槽,利用两个调节长槽和螺钉把上连接杆41和中连接杆42连接为一体,并可简便调节(参见图1、2)。
所述划水腿划水机构2为结构一致的左右两组,分别对称安装在机架1的左右两侧边上,构成仿生水黾机器人的中间两条腿,划水腿划水机构2为四杆机构,包含第一划水杆21、第二划水杆22、第三划水杆23及机架1。第一划水杆21一端的槽中嵌入划水舵机臂53,并将划水舵机臂53与划水舵机51输出轴连接,划水舵机51胶结到划水舵机支撑架52上,再将划水舵机支撑架52胶结到机架1上。第一划水杆21的另一端与第二划水杆22的一端、第二划水杆22的另一端与第三划水杆23的一端、以及第三划水杆23的另一端与机架1之间均为旋转副连接。所述的旋转副为微小轴承及销轴制作而成。
所述划水舵机51运行时,带动划水舵机臂53旋转,同时划水舵机臂53也带动第一划水杆21旋转,并通过四杆机构带动第二划水杆22运动,从而将划水舵机51的旋转运动转化为第二划水杆22的划水运动。
所述划水腿抬腿机构3为平行四边形机构,包括第一抬腿杆31、第二抬腿杆33、连接板34和划水板32。第一抬腿杆31一端的槽中嵌入抬腿舵机臂63,并将抬腿舵机臂63与抬腿舵机61的输出轴连接,抬腿舵机61胶结到舵机支撑架62上,再将舵机支撑架62胶结到连接板34上。第一抬腿杆31的另一端与划水板32的一端通过微小轴承及销轴制作的旋转副进行连接,同理划水板32的另一端与第二抬腿杆33的一端、第二抬腿杆33的另一端与连接板34之间也通过微小轴承及轴制作的旋转副进行连接。划水腿抬腿机构3也为结构一致的左右两组,分别与左右两组划水腿划水机构2串联安装,具体为连接板34上设有的长槽孔与第二划水杆22通过螺钉固联。
所述抬腿舵机61运行时,带动抬腿舵机臂63旋转,同时抬腿舵机臂63带动抬腿杆31旋转,并通过平行四边形机构带动划水板32上下运动,从而将抬腿舵机61的旋转运动转化为划水板32的抬腿运动。
所述划水板32的入水高度或划水板32与水面之间距离,可通过第二划水杆22与连接板34之间的滑槽位置来调节;也可通过调节两个支撑腿的上连接杆41和中连接杆42的滑槽连接位置,使机器人机身整体抬高或降低,从而使划水板的入水高度得到高低调节,使机器人划水时划水板32能适当浸入水中,机器人抬腿时划水板32能适当脱离水面。
控制电路部分主要包括单片机和遥控器,是现有技术。单片机安装在机架1上。利用遥控器控制机器人能够实现前进,左转,右转等运动。
所述机器人机架1与各个连杆件可选用碳纤维板、塑料或有机玻璃材料制造。实施例均采用有机玻璃材料制作,具有重量轻,机械加工性能较好等特点。
本发明机器人的工作过程和原理是:利用前后四条支撑腿4所受的浮力支撑机器人,稳定漂浮在水面上。左右或中间两条腿由四杆机构构成的划水腿划水机构2和平行四边形机构构成的划水腿抬腿机构3构成,划水机构2与抬腿机构3串联安装,并通过控制电路使其相互配合运动。在控制电路控制下,通过划水舵机51的驱动,使划水腿划水机构2的划水杆22运动,并带动抬腿机构3的划水板32一起做划水和回腿运动;通过抬腿舵机61驱动使划水腿抬腿机构3的抬腿杆31运动,从而带动划水板32一起做入水和抬腿运动。运动过程如下:抬腿舵机61驱动划水腿抬腿机构3的抬腿杆31使机器人划水板32入水,然后划水舵机51驱动划水机构2带动抬腿机构3的划水板32进行划水运动,接着抬腿舵机61驱动抬腿机构3的抬腿杆31使机器人划水板32抬出水面,最后划水舵机51驱动划水机构2带动划水板32进行回腿运动,实现机器人一个划水-抬腿-回腿-入水的循环周期运动;同时,左右两个划水腿可以利用其一侧单腿运动和另一侧保持不动的方式,或者左右两侧划水腿都运动,但具有差动的方式来实现和控制机器人的转弯运动。四个漂浮支撑腿采用聚氨酯材料制作成流线型,能减少机器人运动时水产生的阻力,并具有一定的浮力。
本发明未述及之处适用于现有技术。
本发明仿生水黾机器人模仿水黾的结构布局和运动机理,具有较好的负载能力,同时具有划水速度快、划水效率高的特点,可用于环境侦察、勘测、水质监控等领域,具有十分重要的应用前景。
一种仿生水黾机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0