








专利摘要
本实用新型提供了一种月球自掘进取芯机器人装置及系统,月球自掘进取芯机器人装置包括悬吊件、支撑驱动组件和取芯组件,悬吊件、支撑驱动组件和取芯组件依次连接,悬吊件用于与吊索连接;当月球自掘进取芯机器人装置进行取芯时,支撑驱动组件与月球自掘进取芯机器人系统的通孔内壁或月层的钻孔的内壁抵持,以使支撑驱动组件与月球自掘进取芯机器人系统或月层相对固定,支撑驱动组件驱动取芯组件钻取月芯,钻取的月芯容置于取芯组件。通过上述设置,支撑驱动组件与孔壁抵持固定,使得支撑驱动组件能够驱动取芯组件钻开月表并伸入月层,便于在无外接轴压动力装置的前提下完成原位大深度取芯。
权利要求
1.一种月球自掘进取芯机器人装置,其特征在于,所述月球自掘进取芯机器人装置用于自月球自掘进取芯机器人系统伸入月层进行取芯,所述月球自掘进取芯机器人装置包括悬吊件、支撑驱动组件和取芯组件,所述悬吊件、所述支撑驱动组件和所述取芯组件依次连接,所述悬吊件用于与吊索连接;当所述月球自掘进取芯机器人装置进行取芯时,所述支撑驱动组件与所述月球自掘进取芯机器人系统的通孔内壁或所述月层的钻孔的内壁抵持,以使所述支撑驱动组件与所述月球自掘进取芯机器人系统或所述月层相对固定,所述支撑驱动组件驱动所述取芯组件钻取月芯,钻取的所述月芯容置于所述取芯组件。
2.如权利要求1所述的月球自掘进取芯机器人装置,其特征在于,所述支撑驱动组件包括壳体、支撑件和驱动件,所述支撑件设于所述壳体的外周,所述驱动件设于所述壳体内,所述驱动件与所述取芯组件连接;所述支撑件在所述壳体的周向上可膨胀,以抵持所述通孔或所述钻孔的内壁,所述驱动件在所述壳体的轴向上可伸缩,以驱动所述取芯组件钻进所述月层。
3.如权利要求2所述的月球自掘进取芯机器人装置,其特征在于,所述驱动件包括依次连接的轴压驱动件、回转驱动件和振动驱动件,所述振动驱动件和所述回转驱动件均与所述取芯组件连接,所述轴压驱动件对所述回转驱动件施加轴压,以使所述回转驱动件推动所述取芯组件沿轴向方向运动;所述回转驱动件对所述振动驱动件施加周向力矩,以使所述振动驱动件带动所述取芯组件绕所述取芯组件的轴线旋转;所述振动驱动件对所述取芯组件施加振动力,以使所述取芯组件在钻取过程中振动。
4.如权利要求3所述的月球自掘进取芯机器人装置,其特征在于,所述轴压驱动件包括缸体和活塞,所述缸体一端开口以形成容腔而呈筒状,所述活塞伸入所述缸体以封闭所述容腔;所述活塞与所述壳体连接固定,所述缸体与所述回转驱动件连接,或所述缸体与所述壳体连接固定,所述活塞与所述回转驱动件连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述容腔充入液体或气体,以使所述缸体和所述活塞相对运动,所述缸体或所述活塞带动所述回转驱动件和所述取芯组件沿所述取芯组件的轴向方向运动。
5.如权利要求3所述的月球自掘进取芯机器人装置,其特征在于,所述轴压驱动件还包括导柱,所述壳体与所述回转驱动件相对的表面设有导向孔,所述导柱伸入所述导向孔,所述导向孔的轴线方向与所述取芯组件的轴向方向平行,所述导柱远离所述导向孔的一端与所述回转驱动件连接。
6.如权利要求3所述的月球自掘进取芯机器人装置,其特征在于,所述回转驱动件包括定子和转子,所述转子设于所述定子的外周,所述定子与所述轴压驱动件连接,所述定子背向所述轴压驱动件的一端与所述取芯组件连接,所述转子远离所述轴压驱动件的一端与所述振动驱动件连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述转子绕所述定子的轴线旋转,以使所述振动驱动件带动所述取芯组件绕所述取芯组件的轴线旋转。
7.如权利要求3所述的月球自掘进取芯机器人装置,其特征在于,所述振动驱动件包括相互连接的换能部和变幅部,所述变幅部背向所述换能部的一端与取芯组件连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述换能部将电能转化为声能,所述变幅部调整所述声能的参数,以使所述取芯组件振动。
8.如权利要求2所述的月球自掘进取芯机器人装置,其特征在于,所述取芯组件包括钻杆和内管,所述钻杆与所述内管均呈筒状,所述内管容置于所述钻杆,所述内管用于容置月芯;当所述月球自掘进取芯机器人装置钻取月芯时,所述驱动件驱动所述钻杆绕所述钻杆的轴线旋转。
9.如权利要求8所述的月球自掘进取芯机器人装置,其特征在于,所述取芯组件还包括自封环,所述自封环设于所述内管背向所述悬吊件的一端并与所述内管连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述自封环呈环状,所述月芯通过所述自封环进入所述内管;当所述月球自掘进取芯机器人装置完成取芯并离开所述月层时,所述自封环封闭以夹断所述月芯,并支撑所述内管中的月芯。
10.如权利要求8所述的月球自掘进取芯机器人装置,其特征在于,所述取芯组件还包括钻头,所述钻头与所述钻杆连接,所述钻头位于所述钻杆背向所述悬吊件的一端,所述钻头设有内孔,所述内孔的轴线方向与所述钻杆的轴线方向相同;当所述月球自掘进取芯机器人装置钻取月芯时,所述钻头旋转以破开所述月层并向所述月层深处钻探,所述月芯通过所述内孔进入所述内管。
11.如权利要求3所述的月球自掘进取芯机器人装置,其特征在于,所述支撑件包括多个膨胀管,所述膨胀管呈环状并套设于所述轴压驱动件的外周;所述月球自掘进取芯机器人装置与月表或所述钻孔的底面抵接时,所述膨胀管通入液体或气体而膨胀,以使所述膨胀管与所述月球自掘进取芯机器人系统的通孔内壁或所述钻孔内壁接触支撑而固定。
12.一种月球自掘进取芯机器人系统,其特征在于,包括存储件、传动件和如权利要求1至11任一项所述的月球自掘进取芯机器人装置,所述存储件容置所述月球自掘进取芯机器人装置钻取的月芯,所述传动件通过吊索与所述月球自掘进取芯机器人装置连接,所述传动件用于控制所述月球自掘进取芯机器人装置移动。
说明书
技术领域
本实用新型属于月球的地质探索领域,尤其涉及月球自掘进取芯机器人装置和具有该月球自掘进取芯机器人装置的月球自掘进取芯机器人系统。
背景技术
月球以其独特的空间位置、广阔的科学探索前景及丰富的环境物质资源,成为了人类探索发现宇宙空间天体的首选。其中,获取月芯是人类探月工程中的重要步骤。
目前获取月芯仍然采用常规的钻取手段,由于月球的低重力环境,钻取月芯的取芯器需要外接动力装置以提供轴压。但外接动力装置的取芯器的钻取深度受限于钻杆的长度,从而难以实现原位大深度取芯。
因此,如何在取芯器不外接提供轴压的动力装置的前提下,克服月球的低重力环境以进行原位大深度取芯成为了关键。
实用新型内容
本实用新型的目的是提供一种月球自掘进取芯机器人装置,能够克服月球的低重力环境以完成原位大深度取芯。
为实现本实用新型的目的,本实用新型提供了如下的技术方案:
第一方面,本实用新型实施例提供了一种月球自掘进取芯机器人装置,所述月球自掘进取芯机器人装置用于自月球自掘进取芯机器人系统伸入月层进行取芯,所述月球自掘进取芯机器人装置包括悬吊件、支撑驱动组件和取芯组件,所述悬吊件、所述支撑驱动组件和所述取芯组件依次连接,所述悬吊件用于与吊索连接;当所述月球自掘进取芯机器人装置进行取芯时,所述支撑驱动组件与所述月球自掘进取芯机器人系统的通孔内壁或所述月层的钻孔的内壁抵持,以使所述支撑驱动组件与所述月球自掘进取芯机器人系统或所述月层相对固定,所述支撑驱动组件驱动所述取芯组件钻取月芯,钻取的所述月芯容置于所述取芯组件。
一种实施方式中,所述支撑驱动组件包括壳体、支撑件和驱动件,所述支撑件设于所述壳体的外周,所述驱动件设于所述壳体内,所述驱动件与所述取芯组件连接;所述支撑件在所述壳体的周向上可膨胀,以抵持所述通孔或所述钻孔的内壁,所述驱动件在所述壳体的轴向上可伸缩,以驱动所述取芯组件钻进所述月层。
一种实施方式中所述驱动件包括依次连接的轴压驱动件、回转驱动件和振动驱动件,所述振动驱动件和所述回转驱动件均与所述取芯组件连接,所述轴压驱动件对所述回转驱动件施加轴压,以使所述回转驱动件推动所述取芯组件沿轴向方向运动;所述回转驱动件对所述振动驱动件施加周向力矩,以使所述振动驱动件带动所述取芯组件绕所述取芯组件的轴线旋转;所述振动驱动件对所述取芯组件施加振动力,以使所述取芯组件在钻取过程中振动。
一种实施方式中,所述轴压驱动件包括缸体和活塞,所述缸体一端开口以形成容腔而呈筒状,所述活塞伸入所述缸体以封闭所述容腔;所述活塞与所述壳体连接固定,所述缸体与所述回转驱动件连接,或所述缸体与所述壳体连接固定,所述活塞与所述回转驱动件连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述容腔充入液体或气体,以使所述缸体和所述活塞相对运动,所述缸体或所述活塞带动所述回转驱动件和所述取芯组件沿所述取芯组件的轴向方向运动。
一种实施方式中,所述轴压驱动件还包括导柱,所述壳体与所述回转驱动件相对的表面设有导向孔,所述导柱伸入所述导向孔,所述导向孔的轴线方向与所述取芯组件的轴向方向平行,所述导柱远离所述导向孔的一端与所述回转驱动件连接。
一种实施方式中,所述回转驱动件包括定子和转子,所述转子设于所述定子的外周,所述定子与所述轴压驱动件连接,所述定子背向所述轴压驱动件的一端与所述取芯组件连接,所述转子远离所述轴压驱动件的一端与所述振动驱动件连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述转子绕所述定子的轴线旋转,以使所述振动驱动件带动所述取芯组件绕所述取芯组件的轴线旋转。
一种实施方式中,所述振动驱动件包括相互连接的换能部和变幅部,所述变幅部背向所述换能部的一端与取芯组件连接;当所述月球自掘进取芯机器人装置钻取月芯时,所述换能部将电能转化为声能,所述变幅部调整所述声能的参数,以使所述取芯组件振动。
一种实施方式中,所述取芯组件包括钻杆和内管,所述钻杆与所述内管均呈筒状,所述内管容置于所述钻杆,所述内管用于容置月芯;当所述月球自掘进取芯机器人装置钻取月芯时,所述驱动件驱动所述钻杆绕所述钻杆的轴线旋转。
一种实施方式中,所述取芯组件还包括自封环,所述自封环设于所述内管背向所述悬吊件的一端;当所述月球自掘进取芯机器人装置钻取月芯时,所述自封环呈环状,所述月芯通过所述自封环进入所述内管;当所述月球自掘进取芯机器人装置完成取芯并离开所述月层时,所述自封环封闭以夹断所述月芯,并支撑所述内管中的月芯。
一种实施方式中,所述取芯组件还包括钻头,所述钻头与所述钻杆连接,所述钻头位于所述钻杆背向所述悬吊件的一端,所述钻头设有内孔,所述内孔的轴线方向与所述钻杆的轴线方向相同;当所述月球自掘进取芯机器人装置钻取月芯时,所述钻头旋转以破开所述月层并向所述月层深处钻探,所述月芯通过所述内孔进入所述内管。
一种实施方式中,所述支撑件包括多个膨胀管,所述膨胀管呈环状并套设于所述轴压驱动件的外周;所述月球自掘进取芯机器人装置与月表或所述钻孔的底面抵接时,所述膨胀管通入液体或气体而膨胀,以使所述膨胀管与所述月球自掘进取芯机器人系统的通孔内壁或所述钻孔内壁接触支撑而固定。
第二方面,本实用新型实施例还提供了一种月球自掘进取芯机器人系统,月球自掘进取芯机器人系统包括存储件、传动件和如第一方面任一项实施方式所述的月球自掘进取芯机器人装置,所述存储件容置所述月球自掘进取芯机器人装置钻取的月芯,所述传动件通过吊索与所述月球自掘进取芯机器人装置连接,所述传动件用于控制所述月球自掘进取芯机器人装置移动。
通过设置支撑驱动组件和取芯组件,支撑驱动组件与月球自掘进取芯机器人系统的通孔或者月层的钻孔的内壁抵持固定,为支撑驱动组件提供驱动的着力位置,使得支撑驱动组件能够驱动取芯组件钻开月表并伸入月层,便于在无外接轴压动力装置的前提下完成原位大深度取芯。
附图说明
为了更清楚地说明本实用新型实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
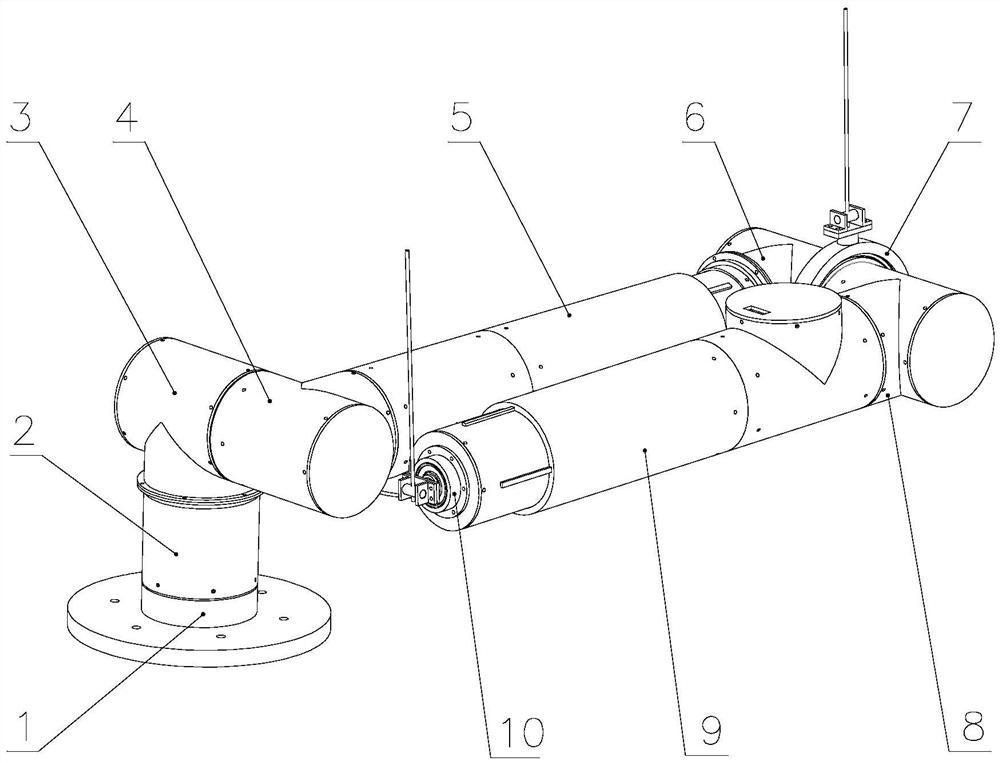
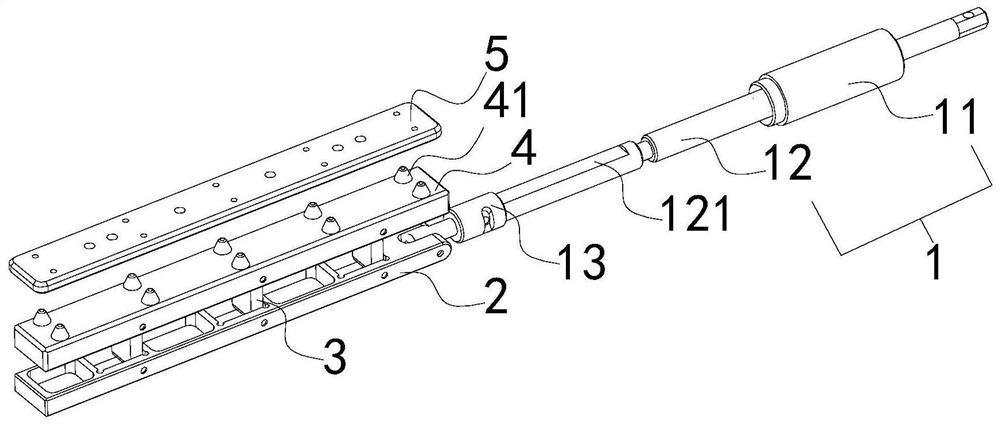
图1是本实用新型实施例提供的月球自掘进取芯机器人装置的结构示意图;
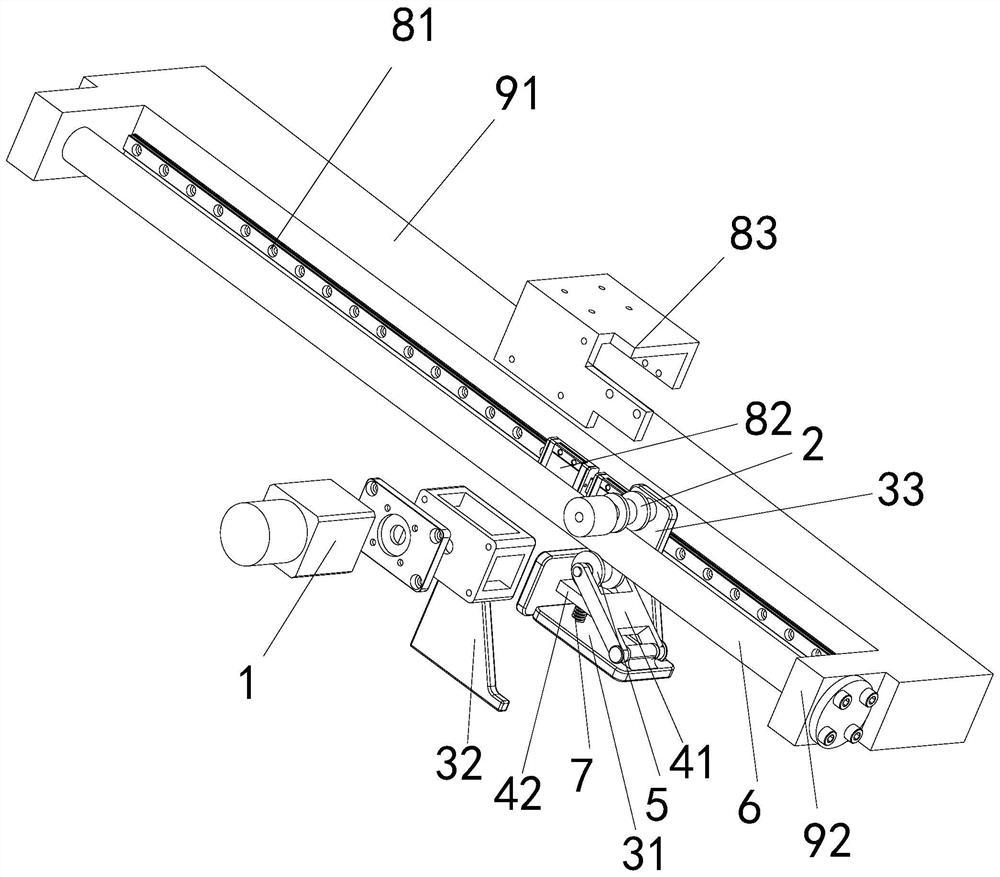
图2是图1的月球自掘进取芯机器人装置的内部的结构示意图;
图3是图1的月球自掘进取芯机器人装置的悬吊件和支撑驱动组件的结构示意图;
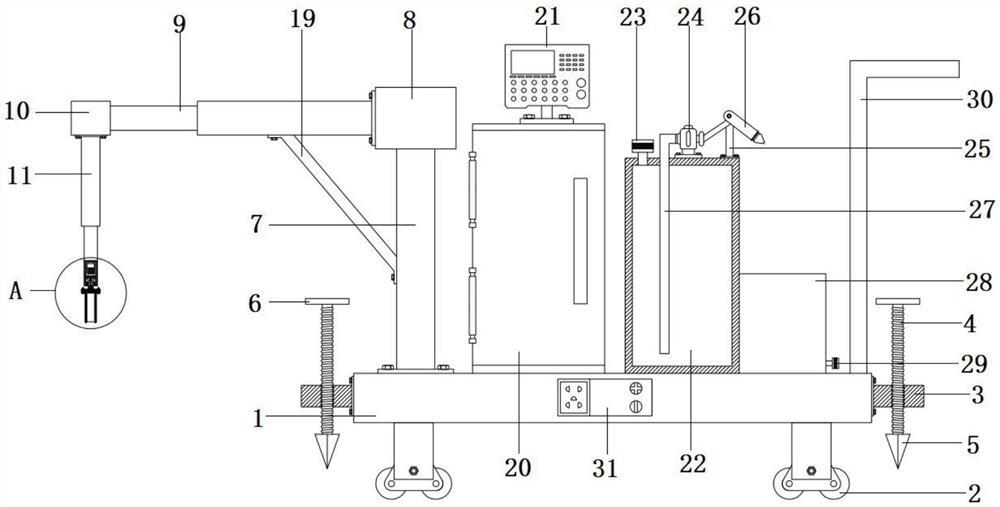
图4是图1的月球自掘进取芯机器人装置的取芯组件的结构示意图。
具体实施方式
下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
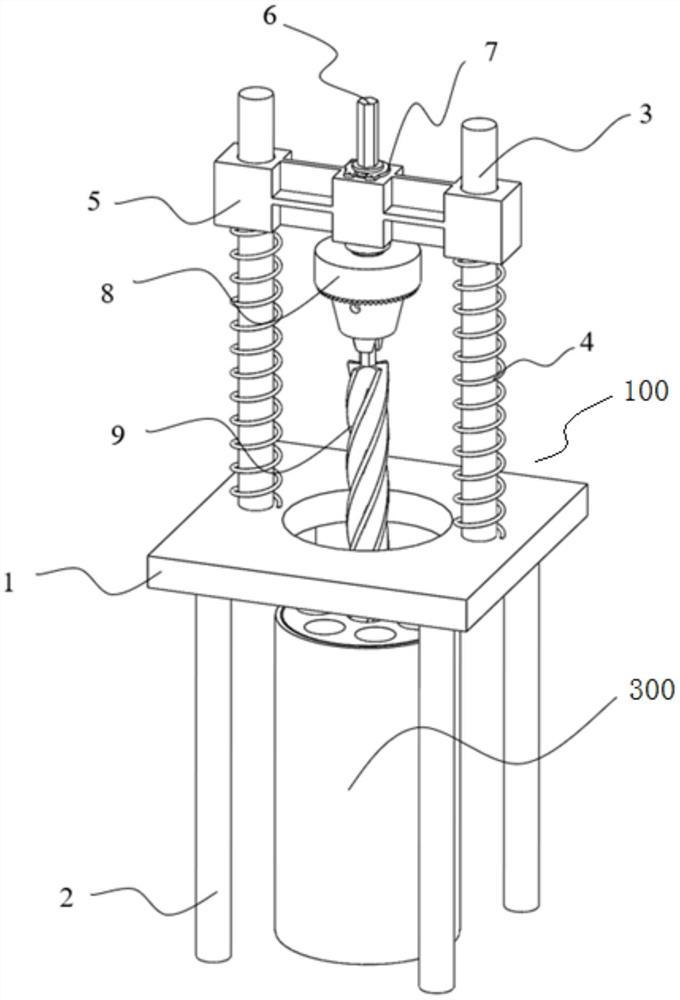
请参阅图1,,本实用新型实施例提供了一种月球自掘进取芯机器人装置 100,月球自掘进取芯机器人装置100用于自月球自掘进取芯机器人系统伸入月层进行取芯,所钻取的月芯为月壤或月岩。月球自掘进取芯机器人装置100主要应用于月球的取芯作业,但对于其他地质条件与月球相似的星球,本实用新型提供的月球自掘进取芯机器人装置100也适用。月球自掘进取芯机器人装置 100包括悬吊件10、支撑驱动组件20和取芯组件30。悬吊件10、支撑驱动组件20和取芯组件30依次连接,悬吊件10用于与吊索连接。当月球自掘进取芯机器人装置100进行取芯时,支撑驱动组件20与月球自掘进取芯机器人系统的通孔内壁或月层的钻孔的内壁抵持,以使支撑驱动组件20与月球自掘进取芯机器人系统或月层相对固定,支撑驱动组件20驱动取芯组件30钻取月芯,钻取的月芯容置于取芯组件30。
具体的,悬吊件10和支撑驱动组件20为螺纹连接或卡扣连接等可拆卸连接的方式,支撑驱动组件20和取芯组件30也为可拆卸连接。悬吊件10背向支撑驱动组件20的端面上设有吊耳,悬吊件10通过吊耳与吊索连接。取芯组件30可采用钨钴类、钨钛钴类和钨钛钽(铌)类等硬质合金。月球自掘进取芯机器人装置100的整体呈杆状,月球自掘进取芯机器人装置100在月表钻取时,自月表向外依次为取芯组件30、支撑驱动组件20和悬吊件10。
可以理解的是,月球自掘进取芯机器人装置100是通过月球自掘进取芯机器人系统的通孔从月球自掘进取芯机器人系统伸出并抵达月表,以破开月层进行取芯。而为了克服传统钻杆由于长度导致的“钻不深”问题,月球自掘进取芯机器人装置100的悬吊件10通过吊索与月表上的月球自掘进取芯机器人系统的其他部件连接,以使得月球自掘进取芯机器人装置100不需要较大的长度也可钻取月层较深处的月芯。但由此引出新的问题,如何在通过吊索连接月球自掘进取芯机器人装置100的前提下,月球自掘进取芯机器人装置100为自身提供钻取月芯的轴压。当月球自掘进取芯机器人装置100首次取芯时,月球自掘进取芯机器人装置100的取芯组件30抵接月表,支撑驱动组件20仍处于月球自掘进取芯机器人系统的通孔内,此时支撑驱动组件20与通孔的内壁抵持而与月球自掘进取芯机器人系统相对固定,然后支撑驱动组件20驱动取芯组件30 远离月球自掘进取芯机器人系统运动,从而钻开月表并伸入月层;当月球自掘进取芯机器人装置100钻进月层取芯时,月球自掘进取芯机器人装置100的支撑驱动组件20和取芯组件30已经伸入月层中,此时支撑驱动组件20与月层的钻孔的内壁抵持而与月层相对固定,然后支撑驱动组件20驱动取芯组件30远离月表运动,从而向月层深处钻取月芯。
通过设置支撑驱动组件20和取芯组件30,支撑驱动组件20与月球自掘进取芯机器人系统的通孔或者月层的钻孔的内壁抵持固定,为支撑驱动组件20提供驱动的着力位置,使得支撑驱动组件20能够驱动取芯组件30钻开月表并伸入月层,便于在无外接轴压动力装置的前提下完成原位大深度取芯。
一种实施方式中,请参阅图2和图3,支撑驱动组件20包括壳体21、支撑件22和驱动件23。支撑件22设于壳体21的外周,驱动件23设于壳体21内,驱动件23与取芯组件30连接。支撑件22在壳体21的周向上可膨胀,以抵持通孔或钻孔的内壁。驱动件23在壳体21的轴向上可伸缩,以驱动取芯组件30 钻进月层。具体的,壳体21与悬吊件10连接,优选为螺纹连接或卡扣连接。壳体21整体呈筒状,内设有容纳孔,驱动件23的部分容置于容纳孔。通过设置支撑件22和驱动件23,支撑件22周向膨胀以与通孔的内壁或者钻孔的内壁抵持并对其施加一个较大的压力,以使得驱动件23在壳体21上周向伸缩时,支撑件22与通孔的内壁或钻孔的内壁之间产生静摩擦力,驱动件23能够推动取芯组件30钻取月芯。
一种实施方式中,请参阅图2和图3,驱动件23包括依次连接的轴压驱动件231、回转驱动件232和振动驱动件233,振动驱动件233和回转驱动件232 均与取芯组件30连接。轴压驱动件231对回转驱动件232施加轴压,以使回转驱动件232推动取芯组件30沿轴向方向运动。回转驱动件232对振动驱动件233 施加周向力矩,以使振动驱动件233带动取芯组件30绕取芯组件30的轴线旋转。振动驱动件233对取芯组件30施加振动力,以使取芯组件30在钻取过程中振动。具体的,回转驱动件232和振动驱动件233均与取芯组件30联动,轴压驱动件231向回转驱动件232施加轴压,轴压通过回转驱动件232传递至取芯组件30。回转驱动件232向振动驱动件233施加周向力矩,周向力矩通过振动驱动件233传递至取芯组件30。而振动驱动件233直接向取芯组件30施加振动力,使其在钻取过程中振动以提高钻进速度。通过设置轴压驱动件231、回转驱动件232和振动驱动件233,轴压驱动件231对取芯组件30进行轴向加压,以支持取芯组件30轴向钻进运动,回转驱动件232使取芯组件30在钻进的同时周向转动,进行“回转+冲击”的工作模式,使得取芯组件30具有较高的钻进效率,同时振动驱动件233使得取芯组件30在钻进的过程中发生多方向的振动,进一步提高取芯组件30的钻进效率。
一种实施方式中,请参阅图2和图3,轴压驱动件231包括缸体2311和活塞2312,缸体2311一端开口以形成容腔2301而呈筒状,活塞2312伸入缸体 2311以封闭容腔2301。活塞2312与壳体21连接固定,缸体2311与回转驱动件232连接;或缸体2311与壳体21连接固定,活塞2312与回转驱动件232连接。当月球自掘进取芯机器人装置100钻取月芯时,容腔2301充入液体或气体,以使缸体2311和活塞2312相对运动,缸体2311或活塞2312带动回转驱动件 232和取芯组件30沿取芯组件30的轴向方向91运动。具体的,活塞2312和缸体2311的延伸方向、壳体21的轴向方向和取芯组件30的轴向方向91(即钻进的方向)相同。通过设置缸体2311和活塞2312,向容腔2301充入液体或气体,从而使取芯组件30获得轴压,便于取芯组件30钻取月芯。
一种实施例中,缸体2311与回转驱动件232连接固定,活塞2312与壳体21连接固定,在活塞2312上开设通液孔(未图示)以通入液体或气体从而形成轴压,轴压驱动件231通过缸体2311将轴压传递至取芯组件30。
另一种实施例中,活塞2312与回转驱动件232连接固定,缸体2311与壳体21连接固定,在缸体2311上开设通液孔以通入液体或气体从而形成轴压,轴压驱动件231通过活塞2312将轴压传递至取芯组件30。活塞2312包括第一连接部23111,第一连接部23111位于活塞2312背向缸体2311的端部,活塞 2312通过第一连接部23111与回转驱动件232连接。
一种实施方式中,请参阅图2和图3,轴压驱动件231还包括导柱2313,壳体21与回转驱动件232相对的表面设有导向孔2302。导柱2313伸入导向孔 2302,导向孔2302的轴线方向与取芯组件30的轴向方向91平行,导柱2313 远离导向孔2302的一端与回转驱动件232连接。具体的,壳体21的导向孔2302 位于容纳孔的四周,导向孔2302的轴线方向与壳体21的轴向方向相同。导柱 2313的数目为多个,导向孔2302的数目与导柱2313的数目相同。导柱2313的一端伸入导向孔2302,导柱2313的另一端与回转驱动件232连接。可以理解的是,回转驱动件232和振动驱动件233会产生一定的周向冲击力,并且由于轴压驱动件231的缸体2311和活塞2312为活动连接,轴压驱动件231容易受到损坏。通过设置导柱2313,导柱2313相对导向孔2302在取芯组件30的轴向方向91上移动,从而起到导向的作用,有利于提高取芯组件30的运动精度,同时,导柱2313承担取芯组件30钻取过程中产生的周向负载,避免轴压驱动件 231出现故障。
一种实施方式中,请参阅图2和图3,回转驱动件232包括定子2321和转子2322,转子2322设于定子2321的外周。定子2321与轴压驱动件231连接,定子2321背向轴压驱动件231的一端与取芯组件30连接,转子2322远离轴压驱动件231的一端与振动驱动件233连接。当月球自掘进取芯机器人装置100 钻取月芯时,转子2322绕定子2321的轴线旋转,以使振动驱动件233带动取芯组件30绕取芯组件30的轴线旋转。具体的,定子2321与活塞2312或者缸体2311连接,转子2322位于定子2321和振动驱动件233的的外周并延伸至取芯组件30,与取芯组件30连接固定。转子2322和定子2321在轴向上相对固定。转子2322包括转子壳23221,定子2321容置于转子壳23221中,且转子壳23221 远离定子2321的一端与振动驱动件233连接。定子2321包括第二连接部23211,第二连接部23211位于定子2321之背向第一连接部23111的一端,第一连接部 23111穿过振动驱动件233与取芯组件30连接。回转驱动件232还包括减速部 (未图示),减速部调节转子2322输出的转速。通过设置定子2321和转子2322,定子2321相对的两端与轴压驱动件231连接,转子2322与取芯组件30连接,
一种实施方式中,请参阅图2和图3,振动驱动件233包括相互连接的换能部2331和变幅部2332,变幅部2332背向换能部2331的一端与取芯组件30连接。当月球自掘进取芯机器人装置100钻取月芯时,换能部2331将电能转化为声能,变幅部2332调整声能的参数,以使取芯组件30振动。具体的,换能部 2331与变幅部2332均设有通孔而呈环状,换能部2331的通孔和变幅部2332的通孔的轴线重合,以使得定子2321的第二连接部23211能够穿过,从而与取芯组件30连接。变幅部2332的外周设有环形电磁铁2333,环形电磁铁2333与变幅部2332固定连接,可以通过环形电磁铁2333控制变幅部2332与取芯组件30 连接与否(通电连接,断电分离)。可以理解的是,变幅部2332主要作用是改变换能部2331的振幅(一般是增大)、提高振速比、提高效率,提高机械品质因数,加强耐热性,扩大适应温度范围,延长振动驱动件233的使用寿命。通过设置换能部2331和变幅部2332,变幅杆调整换能器与取芯组件30之间的负载匹配,减小了谐振阻抗,使其在谐振频率工作,从而提高了电声转换效率,有利于取芯组件30顺利进行原位大深度取芯,同时有效降低了振动驱动件233的发热量,提高使用寿命。
一种实施方式中,请参阅图2、图3和图4,取芯组件30包括钻杆31和内管32,钻杆31与内管32均呈筒状,内管32容置于钻杆31,内管32用于容置月芯。当月球自掘进取芯机器人装置100钻取月芯时,驱动件23驱动钻杆31 绕钻杆31的轴线旋转。具体的,钻杆31设有通孔311,内管32设有盲孔321,内管32容置于钻杆31的通孔311,月芯能够通过内管32的通孔311进入内管 32的盲孔321从而存储于内管32。另外内管32能够通过钻杆31的通孔311在轴向上离开钻杆31,从而离开月层。振动驱动件233的变幅部2332通过环形电磁铁2333与钻杆31可拆卸连接,为钻杆31提供超声振动并使其转动(内管32 不转)。定子2321的第二连接部23211与内管32连接固定。当取芯组件30取芯结束,变幅部2332通过环形电磁铁2333与钻杆31解除连接,定子2321仍然与内管32连接,吊索拉动悬吊部,带动月球自掘进取芯机器人装置100离开月层进入月球自掘进取芯机器人系统,将储存有月芯的内管32放置于月球自掘进取芯机器人系统内,并通过定子2321的第二连接部23211连接未装有月芯的内管32,然后继续进行取芯作业。通过设置钻杆31和内管32,钻杆31钻探月层,内管32存储月芯,避免进入内管32的月芯受到较大的钻取冲击力而丢失原位岩芯成分信息和赋存状态信息。
一种实施方式中,请参阅图2、图3和图4,取芯组件30还包括自封环33,自封环33设于内管32背向悬吊件10的一端并与内管32连接;当月球自掘进取芯机器人装置100钻取月芯时,自封环33呈环状,月芯通过自封环33的通孔331进入内管32;当月球自掘进取芯机器人装置100完成取芯并离开月层时,自封环33封闭以夹断月芯,并支撑内管32中的月芯。可以理解的是,若不设置自封环33,月芯装满内管32后,依然与月层连接,不能随内管32离开月层。通过设置自封环33,当月球自掘进取芯机器人装置100完成取芯并离开月层时,自封环33封闭以夹断月芯,并支撑内管32中的月芯,使得月芯能够随着内管 32离开月层。
可以理解的是,月芯为月壤或者月岩,自封环33适用于钻取月壤时。而在钻取月岩时,由于月岩松脆的特性,可设置自锁式卡爪代替自封环33。自锁式卡爪具有易进难出的特点,月芯通过自锁式卡爪进入内管32后便会被自锁式卡爪支撑而留在内管32中。
一种实施方式中,请参阅图2、图3和图4,取芯组件30还包括钻头34,钻头34与钻杆31连接,钻头34位于钻杆31背向悬吊件10的一端,钻头34 设有内孔341,内孔341的轴线方向与钻杆31的轴线方向相同;当月球自掘进取芯机器人装置100钻取月芯时,钻头34旋转以破开月层并向月层深处钻探,月芯通过内孔341进入内管32。具体的,钻杆31的轴线方向与取芯组件30的轴向方向91平行。钻头34可采用硬质合金,钻头34与钻杆31可以为螺纹连接等连接方式。通过设置具有内孔341的钻头34,月芯能够通过钻头34进入内管32,便于取芯组件30钻取月芯。
一种实施方式中,请参阅图1和图3,支撑件22包括多个膨胀管221,膨胀管221呈环状并套设于轴压驱动件231的外周;月球自掘进取芯机器人装置 100与月表或钻孔的底面抵接时,膨胀管221通入液体或气体而膨胀,以使膨胀管221与月球自掘进取芯机器人系统的通孔内壁或钻孔内壁接触支撑而固定。具体的,膨胀管221为强度较高的柔性材料,以使得膨胀管221不膨胀时,体积较小,不会阻碍取芯器进入月层的钻孔。多个膨胀管221的间距相同,膨胀后的直径相同。通过设置多个膨胀管221,增大膨胀管221与通孔内壁或钻孔内壁的摩擦力,便于轴压驱动件231为取芯组件30提供更大的轴压,有利于提高取芯的效率。
本实用新型实施例还提供了一种月球自掘进取芯机器人系统,请参阅图1,月球自掘进取芯机器人系统主要应用于月球的取芯作业,其不仅具有取芯的功能,还能暂时存储钻取的月芯,并对月芯进行保真。月球自掘进取芯机器人系统包括存储件、传动件和如第一方面任一项实施方式的月球自掘进取芯机器人装置100,存储件容置月球自掘进取芯机器人装置100钻取的月芯,传动件通过吊索与月球自掘进取芯机器人装置100连接,传动件用于控制月球自掘进取芯机器人装置100移动。通过在月球自掘进取芯机器人系统中加入本实用新型提供的月球自掘进取芯机器人装置100,月球自掘进取芯机器人系统通过吊索连接月球自掘进取芯机器人装置100,支撑驱动组件20与月球自掘进取芯机器人系统的通孔或者月层的钻孔的内壁抵持固定,为支撑驱动组件20提供驱动的着力位置,使得支撑驱动组件20能够驱动取芯组件30钻开月表并伸入月层,有利于月球自掘进取芯机器人系统实现原位大深度取芯。
以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本实用新型权利要求所作的等同变化,仍属于实用新型所涵盖的范围。
月球自掘进取芯机器人装置及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0