









专利摘要
本发明涉及一种摆动式硅微陀螺仪,由上、下两层构成,上层为制作在单晶硅片上的陀螺仪机械结构,下层为制作在玻璃衬底上的信号引线,该下层玻璃衬底上布置信号引线以及键合点,陀螺仪上层机械结构由一对完全相同的子结构组成,该两个子结构沿Y轴对称设置,并分别与横梁连接,该横梁通过两组扭杆与下层玻璃衬底相键合,使上层的机械结构部分悬空在下层的玻璃衬底部分之上。本发明采用扭杆和横梁,使陀螺仪绕z轴转动,实现陀螺仪的敏感运动,实现了驱动方向与检测方向的运动解耦;扭杆代替了敏感支承梁,减小了支承梁数目,降低了加工误差对陀螺性能的影响较小。
权利要求
1、一种摆动式硅微陀螺仪,由上、下两层构成,上层为制作在单晶硅片上的陀螺仪机械结构,下层为制作在玻璃衬底[5]上的信号引线,该下层玻璃衬底[5]上布置信号引线[108、208、109a、109b、209a、209b、110、210]以及键合点[4a、4b、111a、111b、211a、211b、112a、112b、112c、112d、212a、212b、212c、212d、113a、113b、213a、213b],其特征在于:陀螺仪上层机械结构由一对完全相同的子结构[100、200]组成,该两个子结构[100、200]沿Y轴对称设置,并分别与横梁[3a、3b]连接,该横梁[3a、3b]通过两组扭杆与下层玻璃衬底[5]相键合,使上层的机械结构部分悬空在下层的玻璃衬底部分之上。
2、根据权利要求1所述的摆动式硅微陀螺仪,其特征在于:两组扭杆与固定基座[1a、1b]连接,该固定基座[1a、1b]与下层玻璃衬底[5]相键合,每组扭杆分别由一根或一根扭杆以上组成,扭杆在XY平面内。
3、根据权利要求1所述的摆动式硅微陀螺仪,其特征在于:两组扭杆与下层玻璃衬底[5]相连,每组扭杆由一根扭杆[12a、12b]组成,扭杆垂直于XY平面。
4、根据权利要求1所述的摆动式硅微陀螺仪,其特征在于:每个子结构包括质量块[101、201]、驱动支承梁[105a、105b、105c、105d、205a、205b、205c、205d]、驱动电容、驱动检测电容和敏感电容,每个质量块[101、201]分别通过各自的驱动支承梁[105a、105b、105c、105d、205a、205b、205c、205d]与横梁[3a、3b]相连。
5、根据权利4所述的摆动式硅微陀螺仪,其特征在于:每个质量块[101、201]四周对称分布直线形活动梳齿,其中沿X轴对称分布的活动驱动梳齿与固定驱动梳齿[103a、103b、103c、103d、203a、203b、203c、203d]交错对插排列形成驱动电容,活动驱动检测梳齿与固定驱动检测梳齿[104a、104b、204a、204b]交错对插排列形成驱动检测电容;质量块[101、201]沿Y轴对称分布活动敏感梳齿与固定敏感梳齿[102a、102b、202a、202b]交错对插排列形成敏感电容。
6、根据权利要求5所述的摆动式硅微陀螺仪,其特征在于:在固定驱动梳齿[103a、103b、103c、103d、203a、203b、203c、203d]上施加带直流偏置的交流电压,实现陀螺仪的单边静电驱动。
7、根据权利要求5所述的摆动式硅微陀螺仪,其特征在于:固定基座[1a、1b]和固定键合点[4a、4b]相连,固定驱动梳齿[103a、103b、103c、103d、203a、203b、203c、203d]、固定驱动检测梳齿[104a、104b、204a、204b]、固定敏感梳齿[102a、102b、202a、202b]分别与下层玻璃衬底的对应键合点[112a、112b、112c、112d、212a、212b、212c、212d、113a、113b、213a、213b、111a、111b、211a、211b]相连。
说明书
技术领域技术领域
本发明属于微电子机械系统和微惯性测量技术,特别是一种摆动式硅微陀螺仪。
技术背景背景技术
微机械惯性仪表包括微机械陀螺仪(MMG)和微机械加速度计(MMA)。利用微电子加工工艺允许将微机械结构与所需的电子线路完全集成在一个硅片上,从而达到性能、价格、体积、重量、可靠性诸方面的高度统一。因而,这类仪表具有一系列的优点(如体积小、重量轻、价格便宜、可靠性高、能大批量生产等),在军民两方面都具有广泛的应用前景。在民用方面,主要用于汽车工业、工业监控及消费类产品和机器人技术,如气囊、防抱死系统、偏航速率传感器、翻滚速率传感器、图象稳定及玩具等等;在军用领域,主要用于灵巧炸弹、智能炮弹、战术导弹、新概念武器和微型飞机的自主导航制导系统等。
1993年,美国德雷珀实验室通过在玻璃表面复盖硅层技术制作了一种新颖的微机械陀螺—音叉式线振动陀螺。该陀螺仪由双质量块、支承梁和横梁组成,在驱动力的作用下双质量在做平行于衬底的线振动,有角速率输入时,双质量块做垂直于衬底平面的角振动,通过检测质量块与衬底间的电容变化,测试输入角速率。为提高陀螺仪的检测电容可减小衬底与质量块的间距或增大它们的重叠面积,但这又大大增加了阻尼,陀螺仪的灵敏度不能有效得到增大。此外,质量块与衬底间的很小间距使得活动结构受到悬浮力的影响,增加了干扰信号。
2007年,裘安萍、苏岩等人研制了的双质量振动式硅微陀螺仪(双质量振动式硅微陀螺仪200710133223.5),该陀螺仪由双质量块、支承梁和横梁组成,在驱动力的作用下双质量在做平行于衬底的线振动,有角速率输入时,双质量块做平行于衬底的另一个方向的线振动,通过检测敏感电容的变化,测试输入角速率。该陀螺仪采用了八根驱动支承梁和八根敏感支承梁实现驱动模态与敏感模态的分离。由于微电子工艺的相对误差较大,加工误差对陀螺仪性能有很大的影响。
发明内容发明内容
本发明的目的在于提供一种能实现驱动模态与检测模态的运动解耦,受加工误差影响较小,且具有高灵敏度、抗干扰能力强的硅微陀螺仪。
实现本发明目的的技术方案为:一种摆动式硅微陀螺仪,由上、下两层构成,上层为制作在单晶硅片上的陀螺仪机械结构,下层为制作在玻璃衬底上的信号引线,该下层玻璃衬底上布置信号引线以及键合点,陀螺仪上层机械结构由一对完全相同的子结构组成,该两个子结构沿Y轴对称设置,并分别与横梁连接,该横梁通过两组扭杆与下层玻璃衬底相键合,使上层的机械结构部分悬空在下层的玻璃衬底部分之上。
本发明与现有技术相比,其显著优点为:(1)两个子结构左右对称布置,增加了输出信号,为单质量块输出信号的两倍,提高了陀螺仪的灵敏度;(2)采用扭杆和横梁,使陀螺仪绕z轴转动,实现陀螺仪的敏感运动,实现了驱动方向与检测方向的运动解耦;(3)扭杆代替了敏感支承梁,减小了支承梁数目,降低了加工误差对陀螺性能的影响较小;(4)两个子结构的驱动运动和检测运动均为相向运动,形成梳齿差动电容检测,实现了敏感输出解耦,抑制了干扰信号;(5)两个子结构的梳齿反对称布置,在两个子结构的驱动梳齿上施加相同的驱动电压,便可使得两个子结构相向运动,从而简化了电路。
下面结合附图对本发明作进一步详细描述。
附图说明附图说明
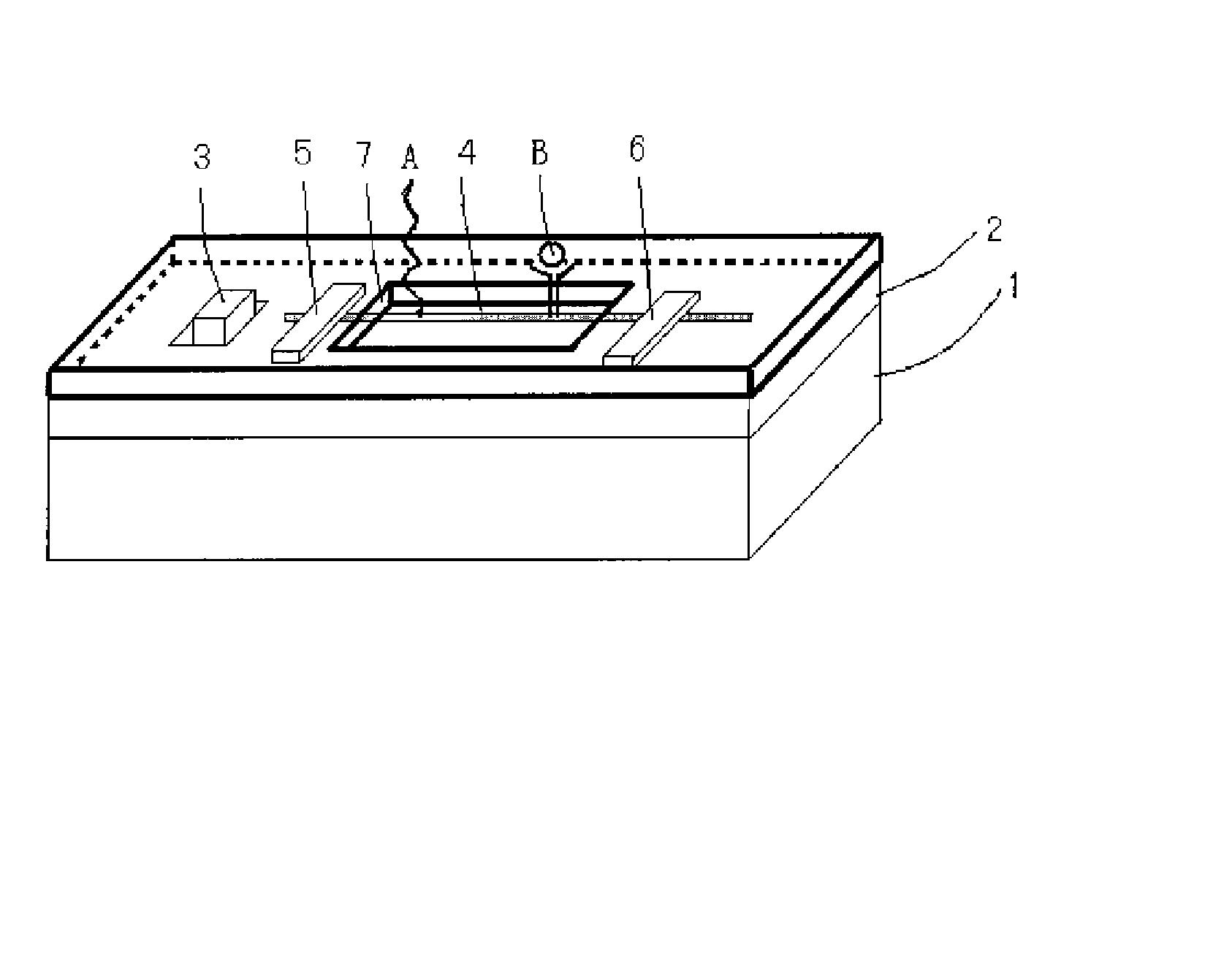
图1是本发明摆动式硅微陀螺仪一种实施例的结构示意图。
图2是本发明摆动式硅微陀螺仪另一种实施例的结构示意图。
图3是本发明摆动式硅微陀螺仪的下层玻璃衬底上的信号引线示意图。
具体实施方式具体实施方式
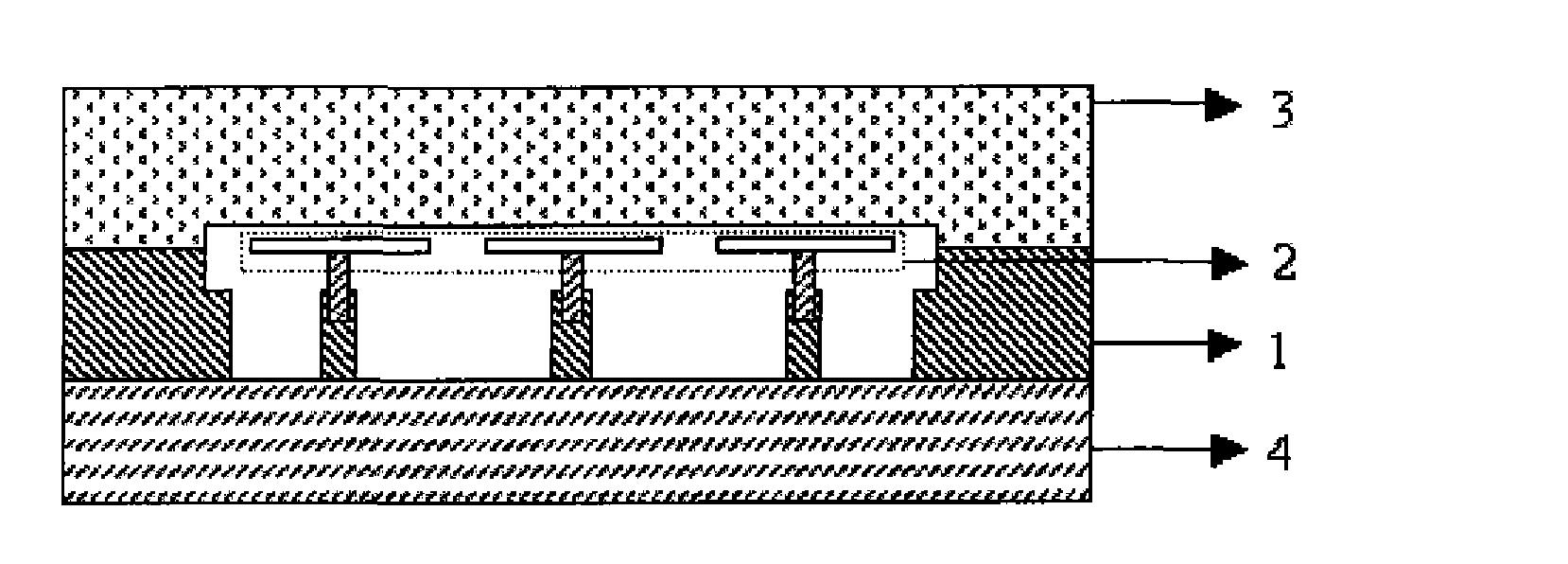
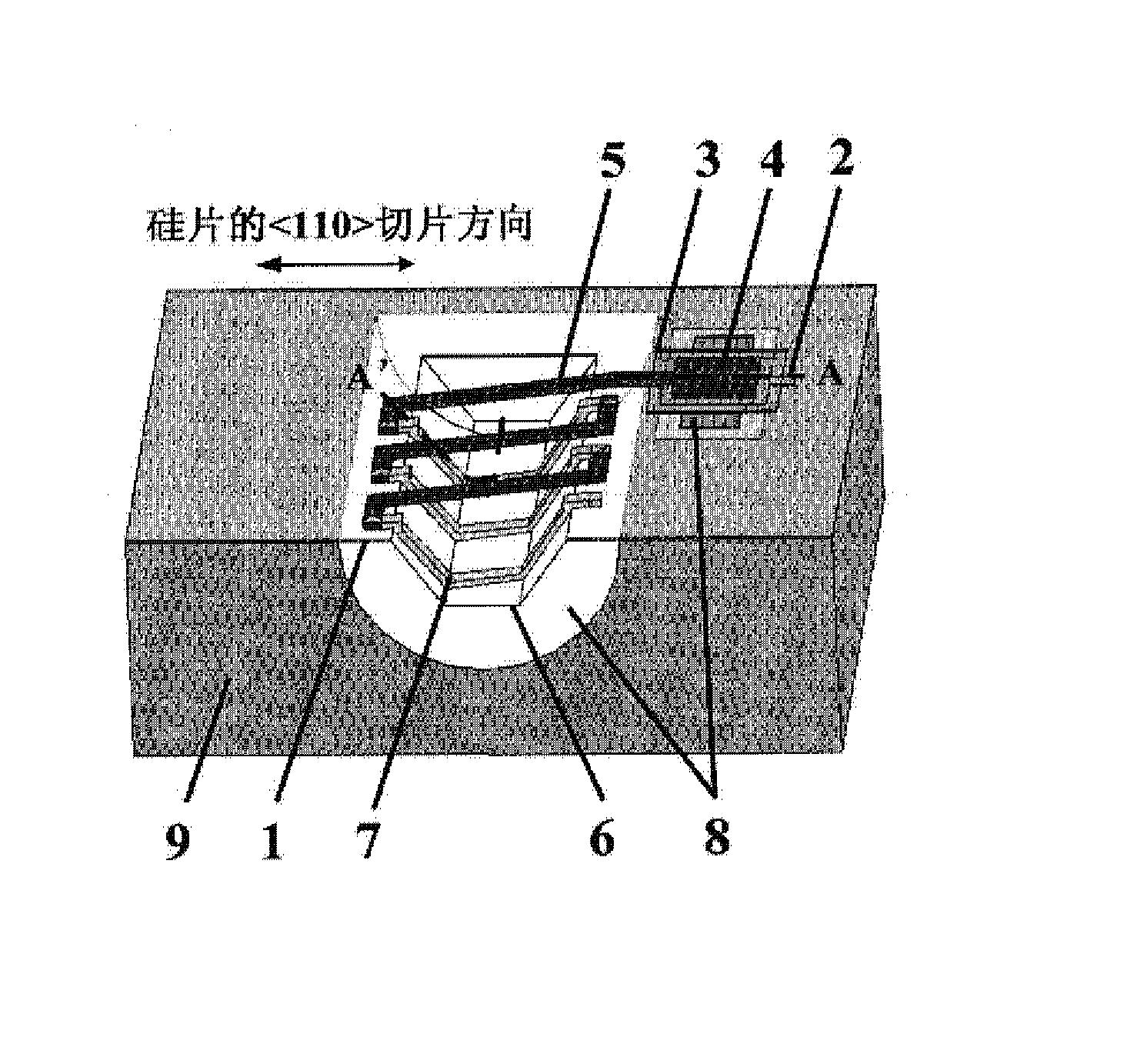
实施例1:结合图1,本发明摆动式硅微陀螺仪,用于测量垂直于基座水平的测量仪器,由上、下两层构成,上层为制作在单晶硅片上的陀螺仪机械结构,下层为制作在玻璃衬底5上的信号引线,该下层玻璃衬底5上布置信号引线108、208、109a、109b、209a、209b、110、210以及键合点4a、4b、111a、111b、211a、211b、112a、112b、112c、112d、212a、212b、212c、212d、113a、113b、213a、213b,陀螺仪上层机械结构由一对完全相同的子结构100、200组成,该两个子结构100、200沿Y轴对称设置,并分别与横梁3a、3b连接,该横梁3a、3b通过两组扭杆与固定基座1a、1b连接,该固定基座1a、1b与下层玻璃衬底5相键合,使上层的机械结构部分悬空在下层的玻璃衬底部分之上。每组扭杆分别由一根或一根扭杆以上组成,如可以为两根扭杆2a、2b、2c、2d,扭杆在XY平面内。
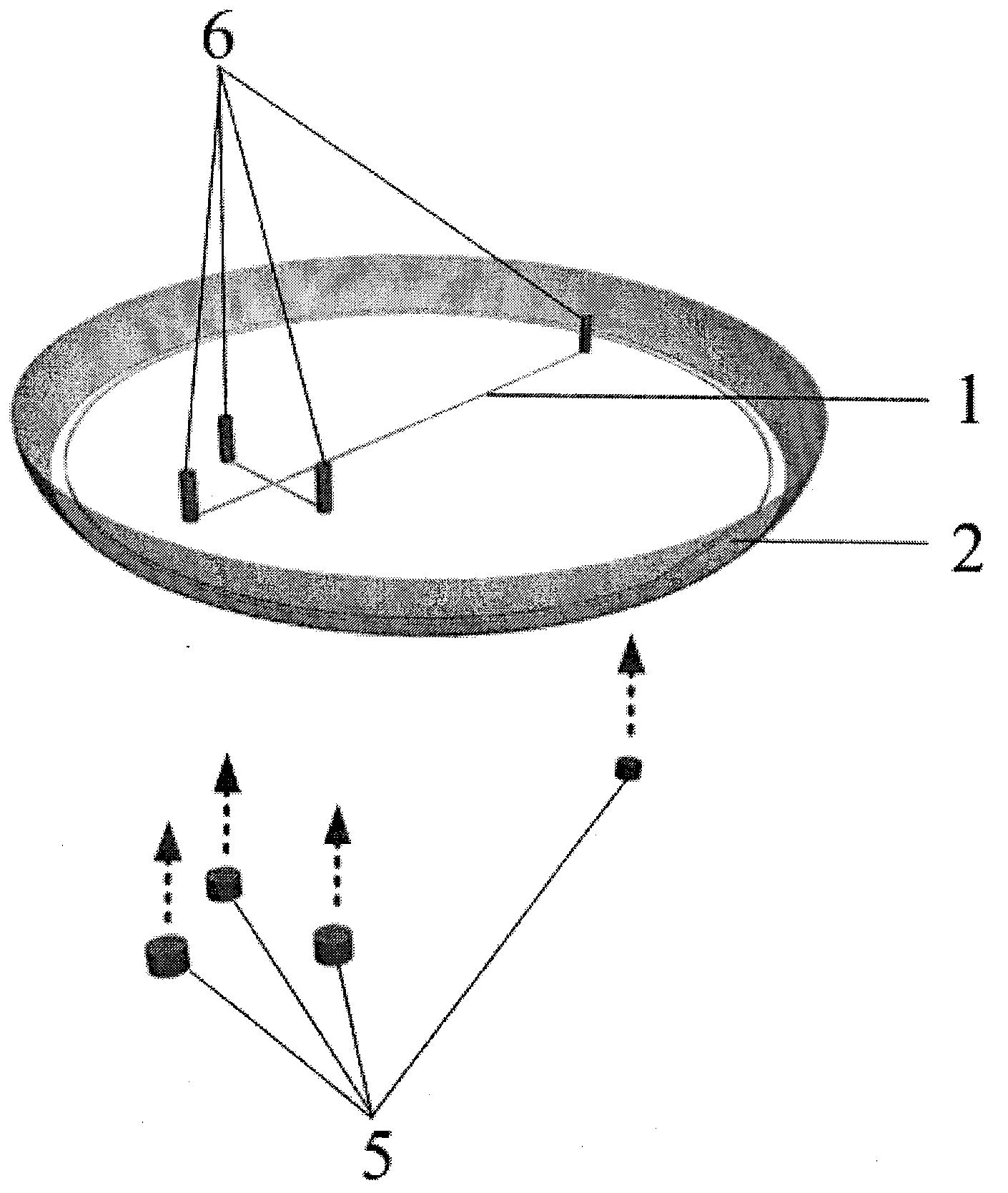
实施例2:结合图2,本发明摆动式硅微陀螺仪,由上、下两层构成,上层为制作在单晶硅片上的陀螺仪机械结构,下层为制作在玻璃衬底5上的信号引线,该下层玻璃衬底5上布置信号引线108、208、109a、109b、209a、209b、110、210以及键合点4a、4b、111a、111b、211a、211b、112a、112b、112c、112d、212a、212b、212c、212d、113a、113b、213a、213b,陀螺仪上层机械结构由一对完全相同的子结构100、200组成,该两个子结构100、200沿检测轴(Y轴)对称设置,并分别与横梁3a、3b连接,该横梁3a、3b通过两组扭杆12a、12b与下层玻璃衬底5相连,使上层的机械结构部分悬空在下层的玻璃衬底部分之上。每组扭杆由一根扭杆12a、12b组成,扭杆垂直于XY平面。
图1所示的四根扭杆2a、2b、2c、2d与陀螺仪结构布置在同一个平面,通过其弯曲可实现陀螺仪绕敏感轴(Z轴)的摆动。扭杆12a、12b与陀螺仪结构平面垂直时,通过其转动可实现陀螺仪绕敏感轴(Z轴)的摆动,其结构示意图如图2所示。这两种方案都可以绕敏感轴(Z轴)的摆动,陀螺仪上层机械结构基本相同,只是其实现的方式为两种,即扭杆在XY平面内或扭杆垂直于XY平面。
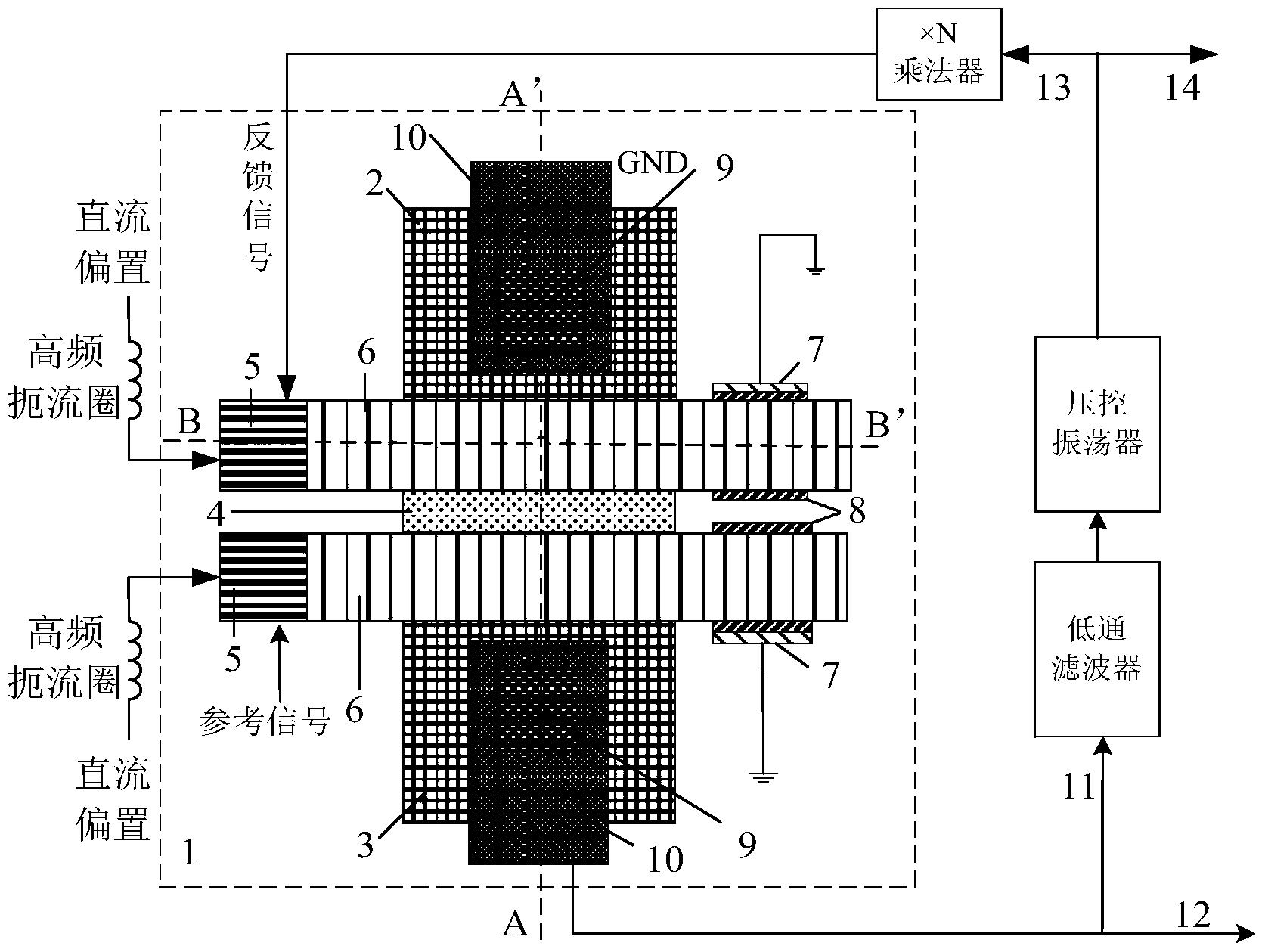
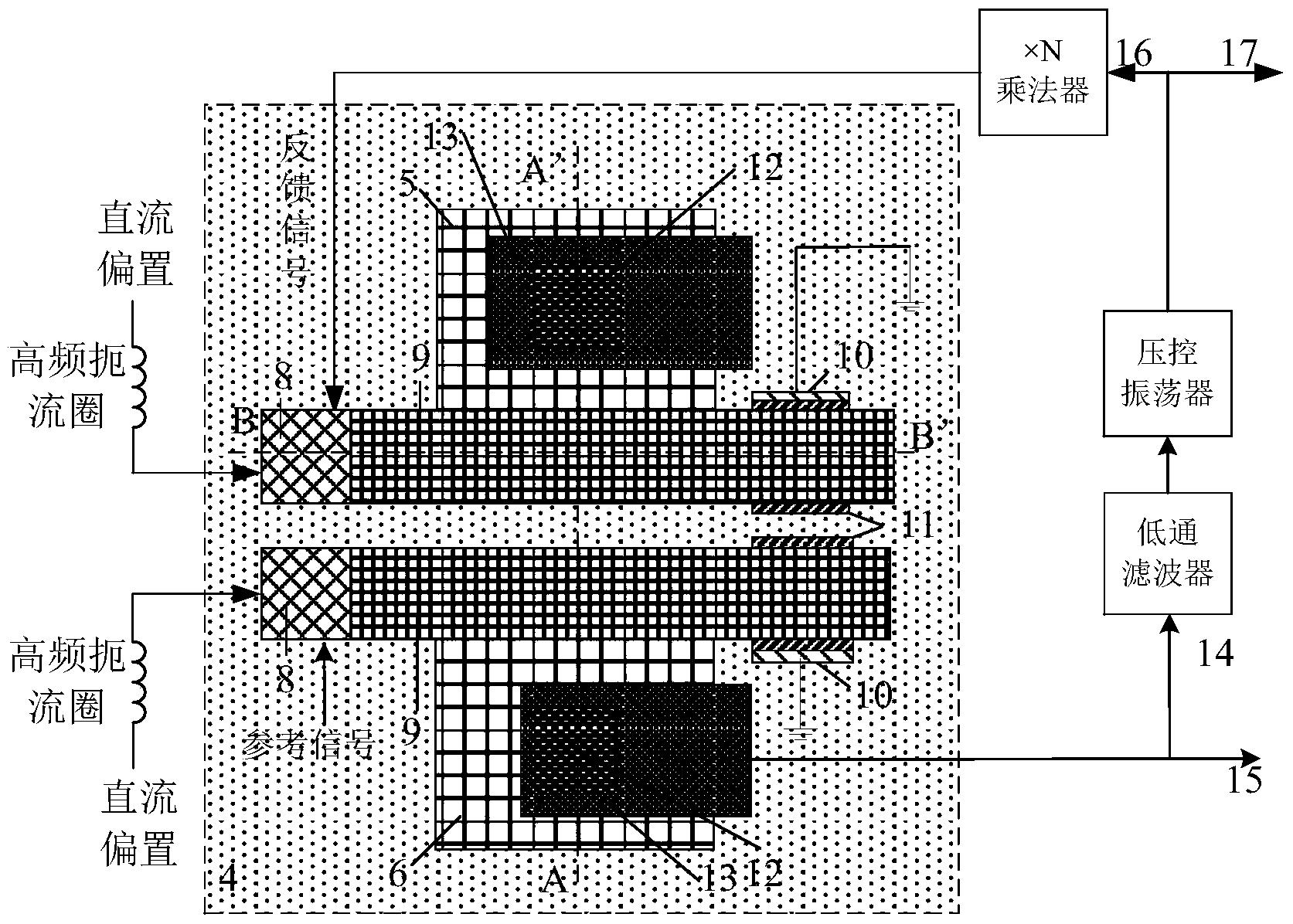
本发明摆动式硅微陀螺仪的每个子结构包括质量块101、201,驱动支承梁105a、105b、105c、105d、205a、205b、205c、205d,驱动电容,驱动检测电容和敏感电容,每个质量块101、201分别通过各自的驱动支承梁105a、105b、105c、105d、205a、205b、205c、205d与横梁3a、3b相连。每个质量块101、201四周对称分布直线形活动梳齿,其中沿驱动轴(X轴)对称分布的活动驱动梳齿与固定驱动梳齿103a、103b、103c、103d、203a、203b、203c、203d交错对插排列形成驱动电容,在固定驱动梳齿103a、103b、103c、103d、203a、203b、203c、203d上施加带直流偏置的交流电压,实现陀螺仪的单边静电驱动。活动驱动检测梳齿与固定驱动检测梳齿104a、104b、204a、204b交错对插排列形成驱动检测电容;质量块101、201沿检测轴(Y轴)对称分布活动敏感梳齿与固定敏感梳齿102a、102b、202a、202b交错对插排列形成敏感电容。在固定驱动梳齿103a、103b、103c、103d、203a、203b、203c、203d上施加带直流偏置的交流电压,实现陀螺仪的单边静电驱动。
本发明摆动式硅微陀螺仪的固定基座1a、1b和固定键合点4a、4b相连,固定驱动梳齿103a、103b、103c、103d、203a、203b、203c、203d,固定驱动检测梳齿104a、104b、204a、204b,固定敏感梳齿102a、102b、202a、202b分别与下层玻璃衬底5的对应键合点112a、112b、112c、112d、212a、212b、212c、212d、113a、113b、213a、213b、111a、111b、211a、211b相连。如附图3所示,玻璃衬底5包括信号引线和金属硅/玻璃键合点。信号引线包括地线,驱动输入引线109a、109b、209a、209b,驱动反馈输入引线110、210,敏感输出信号引线108、208;金属硅/玻璃键合点包括固定基座键合点4a、4b,固定驱动梳齿键合点112a、112b、112c、112d和212a、212b、212c、212d,固定驱动反馈梳齿键合点113a、113b和213a、213b,固定敏感梳齿键合点111a、111b和211a、211b。其中固定基座1a、1b和固定基座键合点4a、4b相连,固定驱动梳齿103a、103b、103c、103d与固定驱动梳齿键合点112a、112b、112c、112d对应相连;固定驱动梳齿203a、203b、203c、203d与固定驱动梳齿键合点212a、212b、212c、212d对应相连;固定驱动检测梳齿104a、104b与固定驱动检测梳齿键合点113a、113b对应相连;固定驱动检测梳齿204a、204b与固定驱动检测梳齿键合点213a、213b对应相连;固定敏感梳齿102a、102b与敏感梳齿键合点111a、111b对应相连;固定敏感梳齿202a、202b与敏感梳齿键合点211a、211b对应相连。
本发明的摆动式硅微陀螺仪,采用单边静电驱动,电容检测的工作方式。在子结构100的固定驱动梳齿103a、103b、103c、103d上施加含直流偏置电压的交流电压,产生交变的静电力,静电驱动力为:
式中,n为谐振器的活动梳齿数,ε为介电常数,h为结构的厚度,d为梳齿间距,Ud为驱动电压的直流偏置电压,Ua为交流电压,ωd为交流电压的角频率。
同理,在子结构200的固定梳齿203a、203b、203c、203d上施加含直流偏置的交流电压,产生交变的静电力,该静电力与作用在子结构100上的静电驱动力相差180度。
因此子结构100和200的整个活动结构在静电驱动力的作用下,沿驱动轴(X轴)作相向简谐线振动。当驱动交流电压的频率与陀螺仪驱动模态的固有频率一致时,线振动位移为:
式中,Fd0为静电驱动力幅值,kx为X方向的弹性刚度,Qx为驱动模态的品质因数。线振动速度为:
当陀螺仪有绕z轴的外界输入角速率ωz时,根据右手定则,检测质量受到检测轴(Y轴)方向的哥氏加速度作用,其大小为:
式中, 为输入角速率和线振动速度之间右旋夹角。
设检测质量为ms,则作用在检测质量上的哥氏惯性力为:
哥氏惯性力的方向与哥氏加速度方向相反,因此,作用在质量块101、201上的哥氏惯性力的方向相反,形成力矩作用在陀螺仪结构上,使得子结构100、200和横梁3a、3b以陀螺仪的几何中心为中心绕敏感轴(Z轴)作角振动。这样,使得活动敏感梳齿与固定敏感梳齿之间的间隙按一定的简谐振动规律变动,电容差值信号经电子线路处理后,可获得输出电压信号。输出电压信号为子结构100、200输出电压信号之和,且输出电压信号的大小正比于输入角速率的大小。通过鉴相器比较输出电压信号与激励信号的相位关系,则可判明输入角速率的方向。
摆动式硅微陀螺仪专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0