









专利摘要
一种气动肌肉及其实现的驱动机构,其中,所述气动肌肉包括:气动肌肉本体,具有轴向的空腔,用于充/放压缩气体,以沿气动肌肉本体轴向提供拉力;气动肌肉本体包括:具有轴向空腔的弹性软管;编织网管,包裹在弹性软管的外层,用于约束弹性软管轴向变形;编织网管包括:交错编织的多根润滑管;多根润滑管的每根润滑管内分别一一套入约束丝。减小了气动肌肉本体在发生形变时,交错处的摩擦力,继而,能够减少气动肌肉由于其本体摩擦力所导致的迟滞性。由此,能够实现提高气动肌肉数学模型的准确度,提高气动肌肉位置控制的精度。
权利要求
1.一种气动肌肉,包括:
气动肌肉本体(1),具有轴向的空腔,用于充/放压缩气体,以沿所述气动肌肉本体(1)轴向提供拉力;
第一密封件(21)和第二密封件(22),分别设置在所述气动肌肉本体(1)轴向的两端,以密封所述气动肌肉本体(1)的空腔;所述第一密封件(21)具有连通所述气动肌肉本体(1)的空腔的充/放气孔(210);
其特征在于,所述气动肌肉本体(1)包括:
具有轴向空腔的弹性软管(11);
编织网管(12),包裹在所述弹性软管(11)的外层,用于约束所述弹性软管(11)轴向变形;所述编织网管(12)包括:交错编织的多根润滑管;所述多根润滑管的每根润滑管内分别一一套入约束丝(121)。
2.如权利要求1所述的气动肌肉,其特征在于,所述多根润滑管以嵌入的方式包裹在所述弹性软管(11)的外层。
3.如权利要求1所述的气动肌肉,其特征在于,所述多根润滑管的每根润滑管与套入其中的所述约束丝(121)之间还包括润滑剂。
4.如权利要求3所述的气动肌肉,其特征在于,所述润滑剂为石墨。
5.如权利要求1-4任意一项所述的气动肌肉,其特征在于,所述弹性软管(11)由橡胶制备。
6.如权利要求1-5任意一项所述的气动肌肉,其特征在于,所述多根润滑管与所述弹性软管(11)的材质相同。
7.如权利要求1-6任意一项所述的气动肌肉,其特征在于,所述约束丝(121)为形状记忆合金丝或者纤维丝。
8.一种气动肌肉驱动机构,其特征在于,包括:
传动机构,用于向执行机构传送其获得的驱动力;
至少一根如权利要求1-7任意一项所述的气动肌肉,所述第一密封件和/或所述第二密封件连接至所述传动机构,用于向所述传动机构提供沿所述气动肌肉本体轴向的拉力。
说明书
技术领域
本发明涉及仿生肌肉领域,具体涉及一种气动肌肉及其实现的驱动机构。
背景技术
随着医学临床对于降低手术风险、减少手术时间的迫切需求,以及患者对于小创口、轻痛感、快速的预后能力的急切需要,微创手术作为近年来快速发展的一种新手术模式而得到普遍的关注,并已然逐渐演变为临床中最常用的一种手术方式。然而,随着科学技术的发展,临床微创术的发展必将走向更加便捷和更加多元化的方向,包括临床的可靠性、兼容性、柔性等多个发展趋势。
为适应柔性的需求,现有技术中存在了较多的柔性驱动器,譬如气动肌肉,相对于刚性驱动器(例如电机),柔性驱动器具有更好的柔顺性。以气动肌肉为例,气动肌肉(PneumaticArtificialMuscle,PAM)作为一种新型仿生驱动装置,主要由充气弹性橡胶管和起约束弹性橡胶管轴向膨胀变形的外部编织网构成,由于编织网具有极低的延展性,所以纵向收缩会对连接负载产生驱动力。气动肌肉主要优点在于工作方式、响应时间、伸缩范围与生物肌肉较为相似,其非线性特性与人体骨骼肌相近,并且具备电机等驱动器不具备的柔顺性,其功率重量比大、无污染、无滑动、易于小型化。其作为一种高效驱动器使用,不仅能够产生足够大的力,同时还可以具有很好的柔顺性,使得被驱动装置具有环境友好特性。
然而,在采用气动肌肉作为驱动器时,其相对于传统的驱动方式,具有较强的迟滞性,呈现爬行蠕变现象。这会导致难以准确建立气动肌肉的数学模型,从而,对气动肌肉位置控制精度造成了一定程度上的影响。为此,也有相关机构对减小气动肌肉迟滞性做了研究,然而效果并不明显。因此,如何减少气动肌肉的迟滞性成为亟待解决的问题。
发明内容
本发明要解决的技术问题在于减少气动肌肉的迟滞性。
为此,根据第一方面,本发明实施例公开了一种气动肌肉,包括:
气动肌肉本体,具有轴向的空腔,用于充/放压缩气体,以沿气动肌肉本体轴向提供拉力;第一密封件和第二密封件,分别设置在气动肌肉本体轴向的两端,以密封气动肌肉本体的空腔;第一密封件具有连通气动肌肉本体的空腔的充/放气孔;气动肌肉本体包括:具有轴向空腔的弹性软管;编织网管,包裹在弹性软管的外层,用于约束弹性软管轴向变形;编织网管包括:交错编织的多根润滑管;多根润滑管的每根润滑管内分别一一套入约束丝。
优选地,多根润滑管以嵌入的方式包裹在弹性软管的外层。
优选地,多根润滑管的每根润滑管与套入其中的约束丝之间还包括润滑剂。
优选地,润滑剂为石墨。
优选地,弹性软管由橡胶制备。
优选地,多根润滑管与弹性软管的材质相同。
优选地,金属丝为形状记忆合金丝或者纤维丝。
根据第二方面,本发明实施例公开了一种气动肌肉驱动机构,包括:
传动机构,用于向执行机构传送其获得的驱动力;至少一根上述的气动肌肉,第一密封件和/或第二密封件连接至传动机构,用于向传动机构提供沿气动肌肉本体轴向的拉力。
本发明技术方案,具有如下优点:
本发明实施例提供的气动肌肉及其实现的驱动机构,由于用于约束弹性软管的编织网管采用多根润滑管编织而成,在每根润滑管内分别套入约束丝,从而,使得约束丝两两交错处非直接接触,在弹性软管发生形变时,约束丝润滑管内滚动,相对于约束丝之间直接接触以及约束丝与弹性软管之间的静摩擦,减小了摩擦因素,继而,减小了气动肌肉本体在发生形变时,交错处的摩擦力,继而,能够减少气动肌肉由于其本体摩擦力所导致的迟滞性。由此,能够实现提高气动肌肉数学模型的准确度,提高气动肌肉位置控制的精度。
作为优选的技术方案,每根约束丝与其对应的润滑管之间包括润滑剂,从而能够进一步减小编织网管交错处的摩擦力。
附图说明
图1为现有技术中气动肌肉的一种结构示意简图;
图2为本实施例中气动肌肉的一种结构示意图;
图3为本实施例中一种气动肌肉本体轴向剖面示意图;
图4为本实施例中一种气动肌肉径向剖面示意图;
图5为本实施例中金属丝套入润滑管中的示意图;
图6为本实施例中一种气动肌肉驱动机构示例示意图。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,下文所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
为便于本领域技术人员理解,首先对本实施例技术方案的构思进行说明。请参考图1,为一种气动肌肉结构示意简图,通常,气动肌肉本体由弹性软管(例如橡胶管)和包裹其外层的编织网管构成,编织网管由多根金属丝121(例如形状记忆合金丝,也可以是纤维丝)交错编织而成,金属丝121在交错编织后会形成交叉的多个交错处A。虽然气动肌肉在充/放气过程中对执行机构产生的是轴向的压力或拉力,但是,由于弹性软管具有一定的弹性,在充/放气过程中,弹性软管会发生形变,该形变体现在弹性软管(亦为气动肌肉本体)的径向,由此,对交错处的金属丝之间形成不同程度的压力,并形成摩擦力。由于充/放气过程弹性软管的形变有差异,导致交错处在充/放气过程中的摩擦力大小不同,使得气动肌肉在充/放气过程中具有一定的迟滞性,并且该迟滞程度与弹性软管的形变成非线性关系,难以准确建立数学模型。
本实施例基于上述摩擦力导致了气动肌肉迟滞性的发现,形成了本发明技术方案的构思,即通过减少编织网交错处摩擦力的方式来减少气动肌肉的迟滞性。
为此,本实施例公开了一种气动肌肉,请参考图2,为本实施例气动肌肉的一种结构示意图,该气动肌肉包括:气动肌肉本体1、第一密封件21和第二密封件22,其中:
气动肌肉本体1具有轴向的空腔,用于充/放压缩气体,以沿气动肌肉本体1轴向提供拉力。在具体实施例中,当气动肌肉本体1的空腔内注入压缩气体(例如压缩空气)时,气动肌肉本体1会沿轴向收缩,从而对外界形成拉力;当气动肌肉本体1空腔内的压缩气体排出时,气动肌肉本体1会沿轴向归位,从而对外界形成的拉力会逐渐减小直至为零。
第一密封件21和第二密封件22分别设置在气动肌肉本体1轴向的两端,以密封气动肌肉本体1的空腔。在具体实施例中,第一密封件21具有连通气动肌肉本体1的空腔的充/放气孔210,通过该充/放气孔210可以连接至压缩气源,以实现对气动肌肉本体1进行充/放气过程。
请参考图3和图4,其中,图3为本实施例气动肌肉本体轴向剖面示意图,图4为本实施例气动肌肉径向剖面示意图,下文结合图2、图3和图4予以说明,在本实施例中,气动肌肉本体1包括:弹性软管11和编织网管12,其中:
弹性软管11具有轴向空腔,用于为压缩气体提供接收场所。在本实施例中,弹性软管11可以采用橡胶制备。
编织网管12编织网管12包裹在弹性软管11的外层,编织网管12用于约束弹性软管11轴向变形。本实施例中,编织网管12包括:交错编织的多根润滑管(图2-4中未示出),在优选的实施例中,交错编织的多根润滑管可以以嵌入的方式包裹在弹性软管11的外层。请参考图5,每根润滑管122内分别一一套入约束丝121。而后,分别套入约束丝121之后的各润滑管122交错编织形成编织网管12。由此,通过将用于编织形成编织网的金属丝121分别套入润滑管122内,对润滑管进行编织,使得交错处约束丝121之间不再直接接触,从而,能够减小约束丝121之间的摩擦力。当然,在其它实施例中,也可以先对各润滑管122交错编织形成编织网管12,而后在各润滑管122分别套入约束丝121。在具体实施例中,润滑管122可以优选采用橡胶制备;在其它实施例中,润滑管可以采用与弹性软管11相近或相同的材料制备,从而利于编织网管12与弹性软管11的贴合,减少相互脱层的概率。在具体实施例中,约束丝121可以是金属丝例如形状记忆合金丝,也可以是纤维丝,本实施例中,约束丝121应当优选采用弹性系数大(即轴向延展性低)的材料制备。
为了减少因润滑管122和套入其中的约束丝121之间接触的摩擦力,在优选的实施例中,每根润滑管122与其套入的约束丝121之间还包括润滑剂,该润滑剂优选为石墨,当然,在其它实施例中,该润滑剂也可以是其它能够减小润滑管122和约束丝121之间摩擦因数的物质。
本实施例还公开了一种气动肌肉驱动机构,包括:传动机构和至少一根上述实施例公开的气动肌肉,其中,传动机构用于向待驱动的执行机构传送其获得的驱动力,通常,该驱动力沿气动肌肉的轴向提供,传动机构可以根据其自身的机构设计,基于力矩来实现驱动力的变向;气动肌肉的第一密封件和/或第二密封件连接至传动机构,用于向传动机构提供沿气动肌肉本体轴向的拉力。
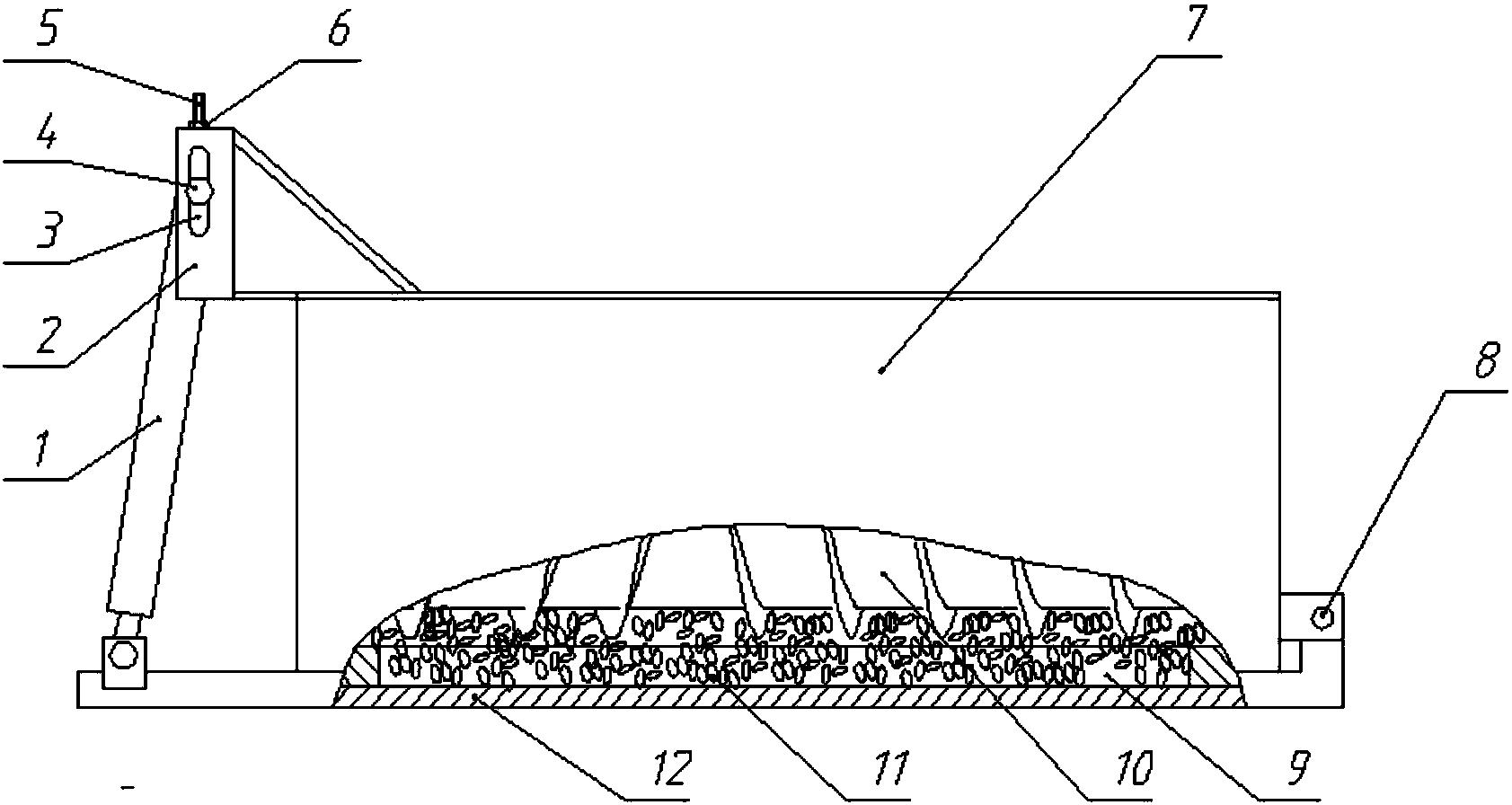
为便于本领域技术人员理解,作为例子,请参考图6,为本实施例公开的一种气动肌肉驱动机构示意,该气动肌肉驱动机构包括:左侧气动肌肉100L、右侧气动肌肉100R以及由转动副200和传动板300构成的传动机构,左、右侧气动肌肉的第一密封件(也可以是第二密封件)或者第二密封件(也可以是第一密封件)分别置于转动副200的两侧,第二密封件(也可以是第一密封件)或者第一密封件(也可以是第二密封件)分别设置在传动板300上。当左侧气动肌肉100L充气收缩,右侧气动肌肉100R放气拉伸时,传动板300会绕转动副200逆时针转动,从而,传动板300对外界的执行机构提供了逆时针方向力矩。需要说明的是,本实施例无法穷举基于气动肌肉实现的驱动机构,本领域技术人员可以基于上述气动肌肉结构及其提供力的方向来实现各种驱动机构,例如可以根据需要增加或减少气动肌肉的数量,也可以变换传动机构的结构。在采用上述实施例公开的气动肌肉作为驱动机构的动力源时,应当认为仍处于本发明创造的保护范围之中。
本发明实施例提供的气动肌肉及其实现的驱动机构,由于用于约束弹性软管的编织网管采用多根润滑管编织而成,在每根润滑管内分别套入约束丝,使得约束丝两两交错处非直接接触。在弹性软管发生形变时,约束丝润滑管内滚动,相对于约束丝之间直接接触以及约束丝与弹性软管之间的静摩擦,减小了摩擦因素,从而,减小了气动肌肉本体在发生形变时,交错处的摩擦力,继而,能够减少气动肌肉由于其本体摩擦力所导致的迟滞性。由此,能够实现提高气动肌肉数学模型的准确度,提高气动肌肉位置控制的精度。
在优选的实施例中,每根约束丝与其对应的润滑管之间包括润滑剂,从而能够进一步减小编织网管交错处的摩擦力。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
气动肌肉及其实现的驱动机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0