









专利摘要
舰艇出海执行任务的时候,经常会遇到台风海浪,或者在作战中被炮弹击中,使得船体倾斜很大的角度,严重的更有倾覆的危险。为了提前预知舰艇所能承受的倾斜范围,或者对舰艇可能会遇到的海况进行模拟,发明了该舰艇海况动态模拟器。本发明采用的是三自由度运动平台与六自由度运动平台进行叠加的方法,使用电液伺服驱动,上面是六自由度运动平台,下面是三自由度运动平台作支撑,在电液伺服系统的控制下,两平台相互配合,可以模拟出各种可能出现的海况。最终可以模拟舰艇海面可能遇到的0~9级海况,可在舰艇的设计制造过程中发挥模拟检测的重大作用。
权利要求
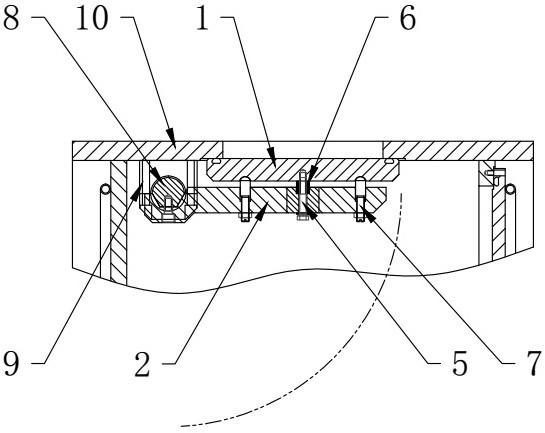
1. 一种舰艇海况模拟器,包括三自由度运动平台,以及安置在所述三自由度运动平台上的六自由度运动平台;其特征在于所述三自由度运动平台包括基座、中间动平台、万向节、上支撑板、下支撑板及三支液压缸;所述基座为三自由度运动平台提供支撑,中间动平台连接三自由度运动平台和六自由度运动平台,所述三支液压缸通过万向节与下支撑板相连接,所述下支撑板固定在基座上面,且下固定点都处于同一圆周面内;三支液压缸同时通过万向节与上支撑板相连,所述上支撑板固定在中间动平台底部,且上固定点都处于同一圆周面内;六自由度运动平台包括中间动平台、上部动平台、万向节、上支撑板、下支撑以及六支液压缸;所述中间动平台支撑六自由度运动平台,所述上部动平台支撑模拟舰艇并带动舰艇运动,在静止状态下,所述基座、中间动平台以及上部动平台是相互平行的,六支液压缸同样通过万向节与上下支撑板相连,下支撑板固定在中间平台上面,且下固定点都处于同一圆周面内,上支撑板固定在动平面底部,且上固定点都处于同一圆周面内;所述液压缸都由后缸盖、O形密封圈、Y形密封圈、导向套、进出油管、活塞、缸体、活塞杆、排气阀座组成,所述后缸盖与缸体焊接在一起,所述活塞杆与活塞采用双螺母防松,所述导向套与活塞杆采用Y形密封圈,导向套与缸体之间采用O形密封圈,所述进出油管构成液压缸进出油路,所述排气阀控制缸体内气体的排放;所述液压缸上面设置有电液伺服阀、传感器以及固定液压缸的固定块,所述电液伺服阀和传感器通过固定块固定在液压缸上面,所述电液伺服阀与控制系统相连,通过调控液压缸的伸缩运动来控制平台的高度及角度,所述传感器与控制系统相连,把采集的液压缸位移信息传送到控制系统,从而实现控制系统对平台的精准控制;所述控制系统包括传感器模块、多路开关模块、A/D转换器模块、D/A转换器模块、单片机模块、采样保持器模块、PID控制器模块;所述传感器模块将实时的液压缸位移数据传送到采样保持器中,所述采样保持器将信号放大后存储以供AD转换器使用,所述AD 转换器将位移信号转换为数字信号传送到单片机模块中,所述单片机根据位置信息发出调控指令进入DA转换器中,所述DA转换器将指令信号转换成数字信号经过多路开关模块进入PID控制器模块,所述多路开关模块给数据传送提供多路通道,所述PID控制器接受指令控制液压缸的运动。
2.一种使用如权利要求1所述的舰艇海况模拟器的舰艇海况模拟方法,其特征在于,0~3级海况通过控制系统使六自由度运动平台中的一支或两支液压缸运动,使得上部动平台有一个0~20度的倾斜角度;3~6级海况通过控制系统使六自由度运动平台中三支以上的液压缸运动,使得动平台倾斜20~40度的角度;6~9级海况通过三自由度运动平台和六自由度运动平台复合运动,使得上部动平台有40~60度倾斜角度;通过控制系统控制液压缸的伸缩运动,模拟出舰艇横摇纵摇的上下浮动,配合以各个倾斜角度的运动,模拟出舰艇处于各种海况下或者战争中的状态。
说明书
技术领域
本发明涉及一种模拟装置,特别是一种舰艇海况动态模拟器。
背景技术
随着当今社会复杂程度的不断加深,航海事业也越来越繁荣,随之而来的就是造船事业的发展,而如今传统的造船术早已不能满足要求,现代先进技术中比较重要的属于仿真技术,而在造船行业应用广范的是舰船运动模拟平台。可以在实验室中模拟舰船可能遭遇的各种海况,然后发现问题,以方便研究设计人员对舰船的改造。随着造船工业的发展,技术人员对实时的舰船模拟的要求越来越高,所以舰船的物理仿真试验系统研究也就越加紧迫。目前,舰船的模拟仿真平台已经成为研究人员在实验室条件下研究舰船海况动态的最重要的手段之一。
现有的舰艇动态模拟平台大多使用六自由度的并联机构,并联机构以其与串联机构相比结构稳定,承载能力大,微动精度高,运动负荷小等特点,在运动模拟器、并联机器人、并联机床、微动器方面有长足的发展和广阔的应用前景。但是并联机构的空间较小,只能模拟舰艇在0~6级海况下的状态,无法模拟出舰艇在大风大浪或者被炮弹击中状态下的运动,这就限制了舰艇动态模拟的级别。
发明内容
针对以上问题,本发明的主要目的是提供一种可以在实验室条件下模拟舰艇在0~9级海况下的状态。
本发明舰艇海况动态模拟器的具体技术方案如下:
一种舰艇海况模拟器,包括三自由度运动平台,以及安置在三自由度运动平台上的六自由度运动平台。三自由度运动平台包括基座、中间动平台、万向节、上支撑板、下支撑板及三支液压缸;所述基座为三自由度运动平台提供支撑,中间动平台连接三自由度运动平台和六自由度运动平台,所述三支液压缸通过万向节与下支撑板相连接,所述下支撑板固定在基座上面,且下固定点都处于同一圆周面内;三支液压缸通过万向节与上支撑板相连,所述万向节能够使液压缸的运动更灵活,所述上支撑板固定在中间动平台底部,且上固定点都处于同一圆周面内;六自由度运动平台包括中间动平台、上部动平台、万向节、上支撑板、下支撑以及六支液压缸;所述中间动平台支撑六自由度运动平台,所述上部动平台支撑模拟舰艇并带动舰艇运动,在静止状态下,所述基座、中间动平台以及上部动平台是相互平行的,六支液压缸同样通过万向节与上下支撑板相连,下支撑板固定中间平台上面,且下固定点都处于同一圆周面内,上支撑板固定在动平面底部,且上固定点都处于同一圆周面内;所述液压缸形式相同由后缸盖、O形密封圈、Y形密封圈、导向套、进出油管、活塞、缸体、活塞杆、排气阀座组成,所述后缸盖与缸体焊接在一起,所述活塞杆与活塞采用双螺母防松,所述导向套与活塞杆采用Y形密封圈,导向套与缸体之间采用了O形密封圈,所述进出油管构成液压缸进出油路,所述排气阀控制缸体内气体的排放;所述液压缸上面设置有电液伺服阀、传感器以及固定液压缸组件的固定块,所述电液伺服阀与控制系统相连,通过调控液压缸的伸缩运动来控制平台的高度及角度,所述传感器与控制系统相连,可将采集的液压缸位移信息传送到控制系统,从而实现控制系统对平台的精准控制;所述控制系统包括传感器模块,多路开关模块,A/D转换器模块,D/A转换器模块,单片机模块,采样保持器模块,PID控制器模块。所述传感器模块将实时的液压缸位移数据传送到采样保持器中,所述采样保持器将信号放大后存储以供AD转换器使用,所述AD 转换器将位移信号转换为数字信号传送到单片机模块中,所述单片机根据位置信息发出调控指令进入DA转换器中,所述DA转换器将指令信号转换成数字信号经过多路开关模块进入PID控制器模块,所述多路开关模块给数据传送提供多路通道,所述PID控制器接受指令控制液压缸的运动。
所述液压缸后缸盖与缸体选用焊接连接式,结构简单,尺寸小。活塞杆与活塞的连接结构采用螺纹连接,双螺母防松。导向套与缸体之间采用了O形密封圈,导向套与活塞杆之间采用了Y形密封圈,在端盖外侧设置了防尘圈以清洁活塞杆处外露部分沾附的灰尘。活塞与缸体及活塞与活塞杆处的密封选用O形密封圈加挡圈的形式。排气阀一般安装在液压缸两端的最高处,当液压缸需要排气时,打来相应的排气阀,空气连同油液经过锥部缝隙和小孔排除缸外,直至连续排油时,就将排气阀关死。
本发明的控制系统是由多模块构成,包括传感器模块,多路开关模块,A/D转换器模块,D/A转换器模块,单片机模块,采样保持器模块,PID控制器模块。传感器将采集到的平台运动状态信号经A/D转换后处理成数字信号导入到单片机中,从而得到运动参数。由主控计算机输入运动参数,经D/A转换器将数字信号转化成模拟电信号,再将信号输入到PID控制器,该控制器将控制电液伺服阀进行运动,从而实现对平台升降高度以及倾斜角度的控制。通过信号输入和反馈,可以及时调节和收集模拟器的姿态。
在六自由度运动平台中,每两个相邻的液压缸为一组成V形固定在中间动平台上,任意四个相邻的液压缸将组成M或W。在模拟6级以内海况的时候,只需要开动六自由度运动平台。其中,0~3级海况属于海面平静或者小风浪的情况,舰艇在这样的海面行驶几乎就是平静行驶,模拟的时候可通过控制中心使一支或两支液压缸运动,使得上部动平台有一个不大的倾斜角度;3~6级海况是海面有大风大浪的情况,舰艇在这种海况下行驶,整个船身有一定的倾斜角度,模拟的时候通过控制中心使六自由度运动平台中三支以上的液压缸运动,使得上部动平台倾斜较大的角度;6~9级海况是海面狂涛怒涛狂风的状态,舰艇遭遇这种恶劣天气将有倾覆的可能,此时模拟的时候就需要两级运动平台复合运动,两级运动平台都运动起来可使得上部动平台有很大的倾斜角度。通过液压缸的伸缩运动,可以模拟出舰艇的上下浮动,配合以各个倾斜角度的运动,就可以模拟出舰艇处于各种海况下或者战争中的状态。
本发明所具有的优点以及积极效果有:
1.使用万向节,液压缸可以灵活地向各个方向运动,从而可以使得运动平台倾斜较大的角度,更好地模拟出0~9级海况。
2.采用液压系统,液压传动系统的输出功率大,系统刚度大,输出位移受外负载的影响小,定位准确,位置误差小,精度比较高,液压缸在电液伺服系统的控制下完成伸缩运动,使得模拟状态更加稳定。
3.相对于市场上六自由度运动模拟平台,本发明可模拟的范围更大更精确。
附图说明
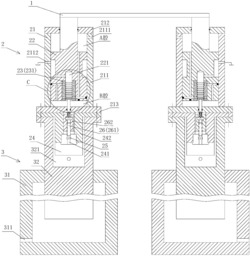
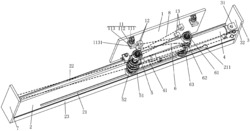
图1为模拟器总装图。
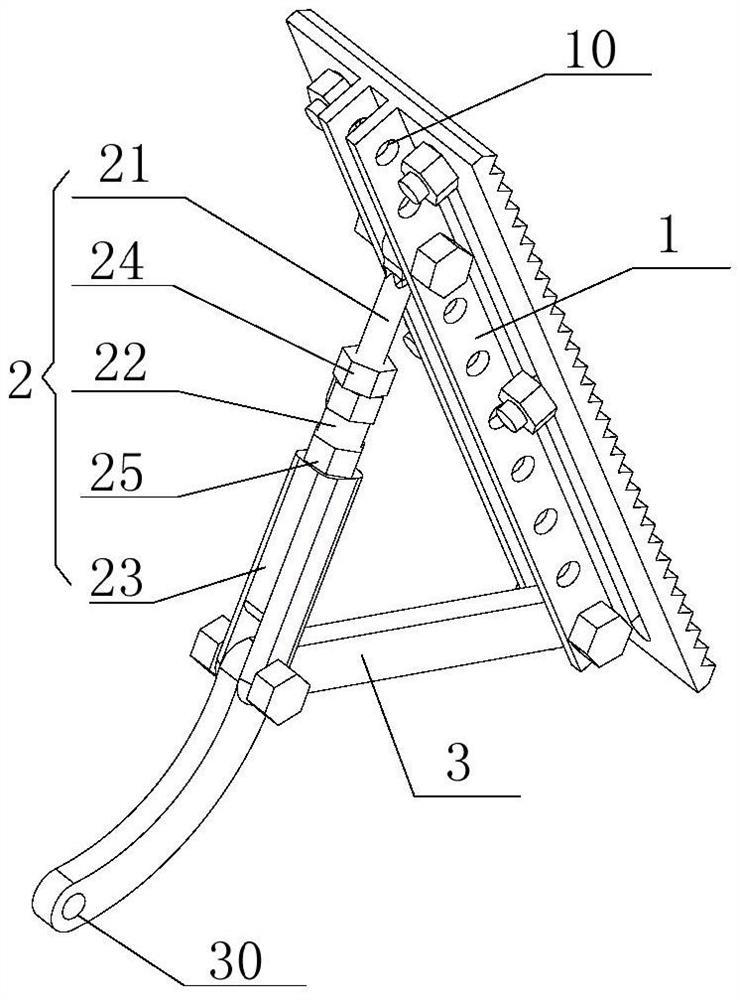
图2为模拟器六自由度运动平台。
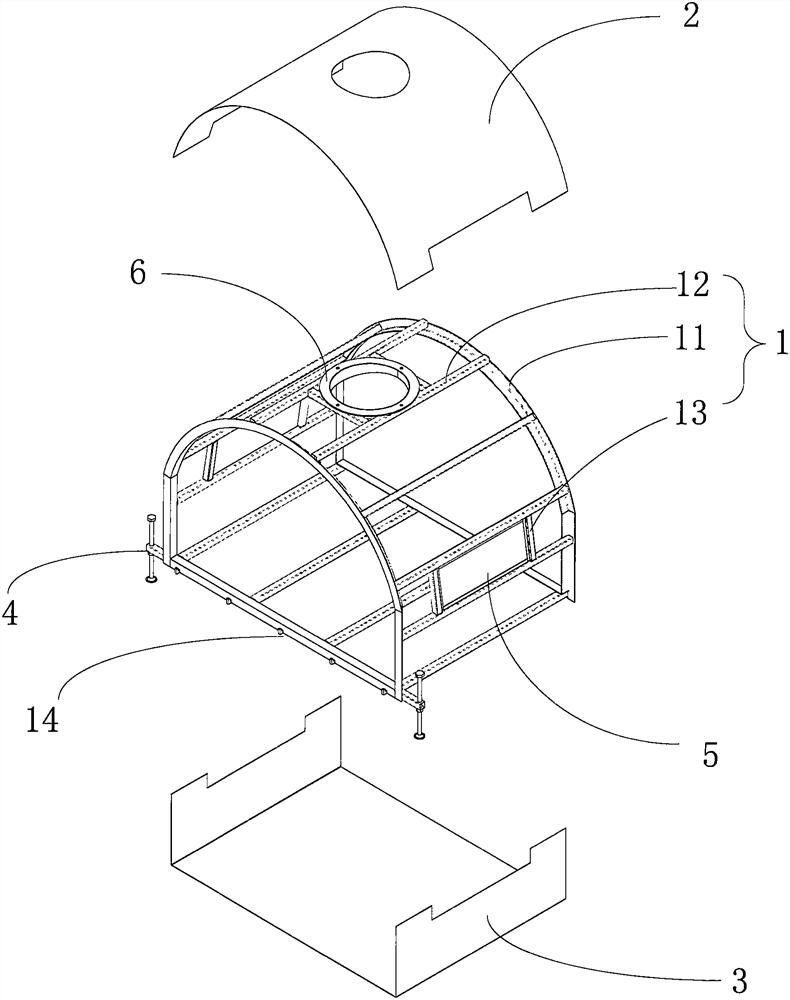
图3为模拟器三自由度运动平台。
图4为液压缸主视图。
图5为液压缸侧视图。
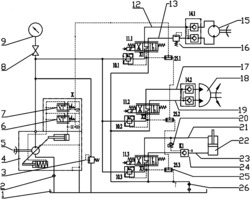
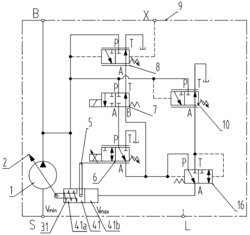
图6为模拟器电路控制框图。
结合附图,本发明实施例的附图标记如下:
1-上部动平台;2-上万向节;3-固定块;4-液压缸;5-传感器;6-阀座;7-电液伺服阀;8-下万向节;9-支撑柱;10-中间动平台;11-基座;12-后缸盖;13-六角螺母;14-垫圈;15-O形密封圈;16-挡圈;17-导向环;18-进出油管;19-活塞;20-缸体;21-活塞杆;22-端盖;23-Y形密封圈;24-卡环;25-挡环;26-挡圈;27-防尘圈;28-传感器基座;29-排气阀组件;30-排气阀座。31-单片机模块;32-AD转换器模块;33-采样保持器模块;34-多路开关模块;35-传感器模块;36-DA转换器模块;37-PID控制器模块。
具体实施方式
下面结合附图对本发明的优选实施例进行说明,以详细说明本发明的技术方案。
根据发明实施例,提供了一种可以模拟舰艇海况的动态模拟器。首先在三自由度运动平台中,三支液压缸可以同时被驱动,这就会使得中间平台在Z轴方向实现上下移动,再通过控制三只液压缸伸缩的不同程度,可以使平台倾斜不同的程度;在六自由度运动平台中,通过驱动六支液压缸使其发生伸缩运动,就可以实现动平台的沿X、Y、Z轴方向上的平动以及绕各自轴的转动;同时两运动平台可以进行复合运动,这就会使得动平台的位置以及倾斜度发生变化,从而就实现了动平台在六个自由度方向上的运动以及各个自由度的复合运动。如图1所示为本发明舰艇海况动态模拟器的前示意图,舰艇海况动态模拟器主要由基座11、中间动平台10、上部动平台1、连接基座11与中间动平台10的三支液压缸4、以及连接中间动平台10与上部动平台1的六支液压缸4组成。所述液压缸4都是通过上万向节2或者下万向节8分别与上下平面都是通过固定块3连接,固定块3是通过吊环螺钉固定在平板上面;仪器启动时液压缸4会在电液伺服阀7的控制下发生上下伸缩运动,传感器5可以感应液压缸的运动参数,在各个液压缸4运动起来后,中间平台以及动平台可以随之运动,而且可以配合出不同的倾斜角度,从而可以模拟出舰艇倾斜的程度。
液压缸组件包括后缸盖12、六角螺母13、垫圈14、O形密封圈15、挡圈16、导向环17、进出油管18、活塞19、缸体20、活塞杆21、端盖22、Y形密封圈23、卡环24、挡环25、挡圈26、防尘圈27、传感器基座28、排气阀组件29、排气阀座30。后缸盖12与缸体20选用焊接连接式,结构简单,尺寸小。活塞杆21与活塞19的连接结构采用螺纹连接,双螺母防松。导向套与缸体20之间采用了O形密封圈15,导向套与活塞杆21之间采用了Y形密封圈23,在端盖22外侧设置了防尘圈17以清洁活塞杆21处外露部分沾附的灰尘。活塞19与缸体20及活塞19与活塞杆21处的密封选用O形密封圈15加挡圈的形式。排气阀29一般安装在液压缸两端的最高处,当液压缸需要排气时,打来相应的排气阀29,空气连同油液经过锥部缝隙和小孔排除缸外,直至连续排油时,就将排气阀29关死。
舰艇海况模拟器控制系统包括单片机模块31,A/D转换器模块32,采样保持器模块33,传感器模块35,D/A转换器模块36,多路开关模块34,以及PID控制器模块37。单片机模块是主控模块,能够保证系统的实施性,并能快速处理和识别多个数据,有着良好的嵌入式能力。考虑系统性价比,可采用ST公司的STM32F103CBT6单片机,其有着上述功能。传感器模块35测得的加速度和角速度信号参数通过采样保持器筛选再经A/D转换后进入模块31,并由模块31发出指令可在主控计算机上显示平台状态。用户将计划参数输入到模块31经D/A转换后,通过多路开关模块可将参数传递给PID控制器以控制平台达到理想姿态。主控芯片和传感器,以及PID控制器之间采用I2C通讯,由主控芯片通过I2C接口向传感器和PID控制器发送信号指令,在I2C总线上的传感器模块和PID模块就开始等待主机地址信号,此时I2C总线上的其他模块就会自动屏蔽之后主机发出的信号,达到PID控制器和主控芯片,传感器和主控芯片之间的通讯。
在进行海况模拟时,0~3级海况属于海面平静或者小风浪的情况,模拟的时候可通过控制系统使六自由度运动平台中的一支或两支液压缸运动,使得上部动平台1有一个约0~20度的倾斜角度;3~6级海况是海面有大风大浪的情况,舰艇在这种海况下行驶,整个船身有一定的倾斜角度,模拟的时候通过控制系统使六自由度运动平台中三支以上的液压缸运动,使得动平台1倾斜大概20~40度的角度;6~9级海况是海面狂涛怒涛狂风的状态,舰艇遭遇这种恶劣天气将有倾覆的可能,此时模拟需要两级运动平台复合运动,使得上部动平台1有40~60度倾斜角度。通过控制系统控制液压缸的伸缩运动,可以模拟出舰艇横摇纵摇的上下浮动,配合以各个倾斜角度的运动,就可以模拟出舰艇处于各种海况下或者战争中的状态。
以上所述仅为本发明较佳的实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、替换、改进等,均应包含在本发明的保护范围之内。
舰艇海况动态模拟器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0