

IPC分类号 : B60W30/02; B60W10/20; B60W30/18; B60W30/08





专利摘要
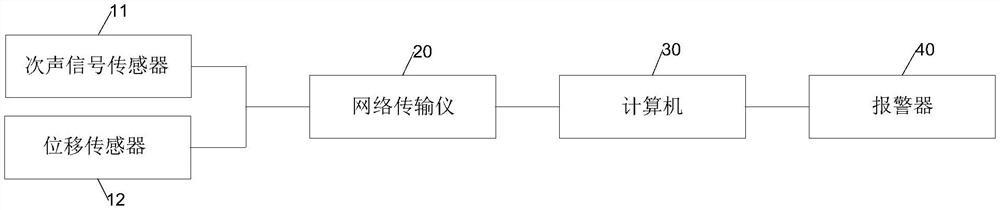
本发明公开了一种基于混杂理论的无人驾驶汽车横向控制系统和方法,包括感知模块、路径规划模块、混杂控制器模块、转向执行模块和显示模块;感知模块用于获取车辆行驶环境和车辆自身运行状态;路径规划模块基于车辆在地图的绝对位置以及车辆与周边障碍物、车道线的相对位置进行路径规划;混杂控制器模块包括局部控制器单元和切换监督控制器单元;局部控制器单元针对车道保持、车道变换、紧急避撞工况下设计符合目标的控制器;切换监督控制器单元在不同离散事件驱动下,驱动有效的模式切换,保证切换稳定性;转向执行模块根据混杂控制器的信号驱动转向电机,实现无人驾驶汽车自动转向;显示模块用于显示感知信息和路径规划信息以及控制模式信息。
专利附图
一种基于混杂理论的无人驾驶汽车横向控制系统和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0