








专利摘要
本发明涉及采用阵列天线估计接收信号到达方向的技术领域,为解决传统的传播算子算法不能利用所有天线阵元的缺点,构造一个新的传播矩阵。解决基于双平行线阵的传播算子二维DOA估计算法,在俯仰角为70°~90°的实际移动通信俯仰角度范围内的角度估计失效问题。提高方位角和俯仰角的估计性能。本发明采用的技术方案是,基于传播算子的2‑L型阵列二维DOA估计算法,步骤如下:步骤1:构造接收信号矩阵步骤2:构造传播矩阵步骤3:估计旋转矩阵步骤4:方位角和俯仰角估计。本发明主要应用于无限探测设备的设计制造。
说明书
技术领域
本发明涉及采用阵列天线估计接收信号到达方向的技术领域,尤其涉及采用2-L型天线阵列的信号到达方向估计方法。
背景技术
空间信号到达方向(Direction of Arrival,DOA)估计是空间谱估计一个主要研究方向,被广泛应用在雷达、声呐、地震、通信等许多领域。DOA估计的基本问题就是确定同时处在空间某一区域内多个感兴趣的信号的空间位置(即各个信号到达阵列参考阵元的方向角,简称波达方向)。经典的超分辨率DOA估计算法有多重信号分类算法(MUSIC,Multiple Signal Classification)和基于旋转不变技术的信号参数估计算法(ESPRIT,Estimation of Signal Parameter via Rotational Invitation Techniques)。它们都属于子空间类算法,其中MUSIC算法是噪声子空间类算法,ESPRIT算法是信号子空间类算法,以MUSIC算法为代表的算法包括特征矢量法、求根MUSIC法等,以ESPRIT算法为代表的算法包括最小二乘ESPRIT,总体最小二乘ESPRIT等。其中MUSIC算法的中心思想为:利用不同特征值的特征向量之间的正交性将空间划分为正交的子空间,然后使用这种正交性构造阵列空间谱函数,搜索其极值就可以实现空间信号电磁波的来向估计。
传统的MUSIC算法和ESPRIT算法等高分辨率算法,虽然具有良好的估计性能,但是由于需要进行谱峰搜索或者是对接收信号协方差矩阵进行特征值分解,在应用到二维DOA估计时具有较大的计算量,尤其是在阵元数目较大时。传播算子算法在求解信号子空间和噪声子空间时仅需要进行线性运算,因此具有较低的计算复杂度。目前,存在大量基于传播算子的L型阵列、2-L型阵列、双平行线阵、三平行线阵等二维DOA估计算法。但是某些基于双平行线阵以及基于L型阵列的传播算子算法在俯仰角为70°~90°的实际移动通信俯仰角度范围内存在角度估计失效问题,有些基于三平行线阵采用传播算子的二维DOA估计算法并没有充分利用天线阵列的结构特点,有些基于2-L型阵列的采用传播算子的二维DOA估计算法分别利用阵列的两个L型子阵,单独估计信号的方位角和俯仰角,估计性能较差。此外还有些算法需要进行费时的谱峰搜索。
发明内容
为克服现有技术的不足,本发明旨在解决传统的传播算子算法不能利用所有天线阵元的缺点,构造一个新的传播矩阵。解决基于双平行线阵的传播算子二维DOA估计算法,在俯仰角为70°~90°的实际移动通信俯仰角度范围内的角度估计失效问题。提高方位角和俯仰角的估计性能。本发明采用的技术方案是,基于传播算子的2-L型阵列二维DOA估计算法,步骤如下:
步骤1:构造接收信号矩阵
将位于坐标原点的阵元作为参考阵元,线阵X,Y,Z接收到的信号向量分别为x(t)=[x1(t),x2(t),…,xN(t)]T,y(t)=[y1(t),y2(t),…,yN(t)]T和z(t)=[z1(t),z2(t),…,zN(t)]T,其中xi(t),yi(t),zi(t)分别表示线阵X,Y,Z上的第i个阵元在t时刻接收到的信号,N为子阵阵元数目,T表示矩阵转置运算,构造新的接收信号向量w(t)=[xT(t),yT(t),zT(t)]T,且有 其中Ax,Ay,Az分别为线阵X,Y,Z的阵列流型矩阵,A为2-L型阵列的阵列流型矩阵,s(t)为阵列的来波信号,n(t)为噪声分量,则对应M快拍的接收数据矩阵为W=[w(1),w(2),…,w(M)];
步骤2:构造传播矩阵
接收信号的自相关矩阵为 将其按如下形式分块,R=[R1,R2],其中H表示矩阵取共轭转置运算,R1∈C3N×K,R2∈C3N×(3N-K),C为复数,则传播矩阵为 定义一个新的扩展传播矩阵 其中IK×K为K阶的单位矩阵,K为来波信号的个数;
步骤3:估计旋转矩阵
将Pc按如下形式分块, 其中Px,Py,Pz均为N×K的矩阵,定义矩阵 其中A1为A的前K行,Pz,1为Pz的前N-1行,Pz,2为Pz的后N-1行,对Ψz进行特征值分解,则其特征值即为 的对角线分量, 为Φz的估计值,特征向量矩阵 即为A1的估计值,其中Φz为子阵Z对应的旋转矩阵,其形式为 其中diag表示将一个向量对角化,d为阵元间距,λ为来波信号的波长,θi表示第i个信号的俯仰角,定义两个新的矩阵 其中Px,1为Px的前N-1行,Px,2为Px的后N-1行,则有 其中 为Φx的估计值,Φx的形式为 为对应第i个信号的方位角,同理定义两个新的矩阵 其中Py,1为Py的前N-1行,Py,2为Py的后N-1行,则有 其中 为Φy的估计值,Φy的形式为
步骤4:方位角和俯仰角估计
设 分别为 的第k个对角线分量,则方位角和俯仰角的估计值 分别为 其中angle表示取幅角运算,atan表示取反正切运算。
本发明的特点及有益效果是:
通过构造一个新的传播矩阵,利用了所有阵元的信息,能够以较低的计算复杂度获得较好的方位角和俯仰角估计性能;能够实现方位角和俯仰角估计的自动配对;在俯仰角为70°~90°的实际移动通信的俯仰角度范围内不会出现角度模糊问题。
附图说明:
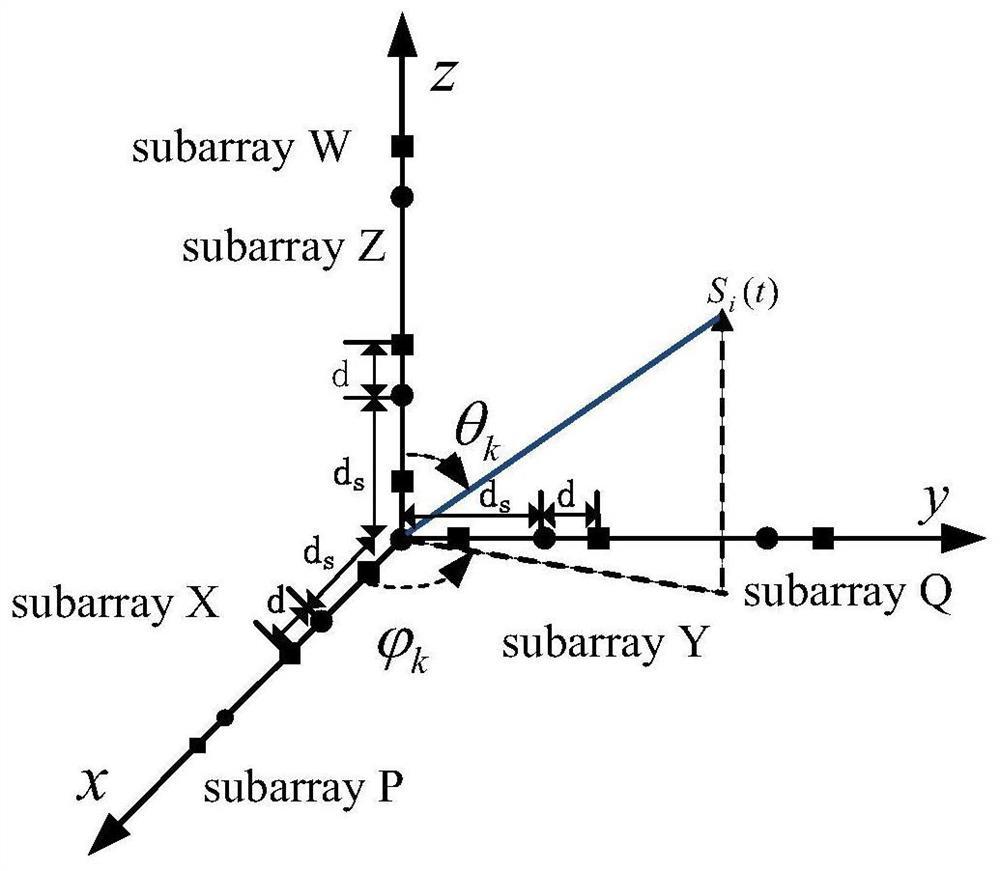
图1天线阵列结构示意图。
图2方位角估计直方图。
图3俯仰角估计直方图。
图4不同角度组合估计联合均方误差图。
图5方位角估计均方误差随信噪比变化情况。
图6俯仰角估计均方误差随信噪比变化情况。
具体实施方式
针对已有DOA估计算法存在的问题,本发明提出了一种基于传播算子的2-L型阵列二维DOA估计算法,其特征在于:该天线阵列为2-L型阵列,其中在x轴、y轴和z轴上分别有一个阵元数目为N的均匀线阵,分别用X,Y,Z表示。阵元间距为来波信号波长的一半。
本发明采用的技术方案:基于传播算子的2-L型阵列二维DOA估计算法,包括以下步骤:
步骤1:构造接收信号矩阵。
将位于坐标原点的阵元作为参考阵元,线阵X,Y,Z接收到的信号向量分别为x(t)=[x1(t),x2(t),…,xN(t)]T,y(t)=[y1(t),y2(t),…,yN(t)]T和z(t)=[z1(t),z2(t),…,zN(t)]T,其中xi(t),yi(t)zi(t)分别表示线阵X,Y,Z上的第i个阵元在t时刻接收到的信号。构造新的接收信号向量w(t)=[xT(t),yT(t),zT(t)]T,则对应M快拍的接收数据矩阵为W=[w(1),w(2),…,w(M)]。
步骤2:构造传播矩阵
接收信号的自相关矩阵为 将其按如下形式分块,R=[R1,R2],其中R1∈C3N×K,R2∈C3N×(3N-K)。则传播矩阵 定义一个新的扩展传播矩阵 其中IK×K为K阶的单位矩阵,K为来波信号的个数。
步骤3:估计旋转矩阵
将Pc按如下形式分块, 其中Px,Py,Pz均为N×K的矩阵。定义矩阵 其中Pz,1为Pz的前N-1行,Pz,2为Pz的后N-1行。对Ψz进行特征值分解,则其特征值即为 的对角线分量, 为Φz的估计值,特征向量矩阵 即为A1的估计值,其中Φz为子阵Z的阵列流型矩阵。定义两个新的矩阵 其中Px,1为Px的前N-1行,Px,2为Px的后N-1行。则有 其中 为Φx的估计值,其中Φx为子阵X的阵列流型矩阵。同理定义两个新的矩阵 其中Py,1为Py的前N-1行,Py,2为Py的后N-1行。则有 其中 为Φy的估计值,其中Φy为子阵Y的阵列流型矩阵。
步骤4:方位角和俯仰角估计
设 分别为 的第k个对角线分量,则方位角和俯仰角的估计值 分别为 其中angle表示取幅角运算,atan表示取反正切运算。。
下面将结合附图和实施例对本发明做进一步的描述:
构造如图1所示的2-L型天线阵列。假设空间中有K个窄带非相关信号入射到阵列上,其中第k个信号的二维波达方向为 (k=1,2,…K), 和θk分别为来波信号的方位角和俯仰角。
步骤1:构造接收信号矩阵。
子阵X,Y,Z在t时刻接收到的信号向量x(t)=[x1(t),x2(t),…,xN(t)]T,y(t)=[y1(t),y2(t),…,yN(t)]T,z(t)=[z1(t),z2(t),…,zN(t)]T可以用式(1)表示。
其中nx(t),ny(t),nz(t)是N×1维的均值为0,方差为σ2的加性高斯白噪声,并和s(t)相互独立。 为子阵X的阵列流型矩阵,其中 为子阵Y的阵列流型矩阵,其中 为子阵Z的阵列流型矩阵,其中
将x(t),y(t),z(t)组合为一个新的接收信号向量w(t)=[xT(t),yT(t),zT(t)]T。则对于M快W=[w(1),w(2),…,w(M)]。
步骤2:构造传播矩阵
接收信号的自相关矩阵为 将其按如下形式分块,R=[R1,R2],其中R1∈C3N×K,R2∈C3N×(3N-K)。则传播矩阵为 定义一个新的扩展传播矩阵
步骤3:估计旋转矩阵
将Pc按如下形式分块, 其中Px,Py,Pz均为N×K维的矩阵。定义矩阵 其中Pz,1为Pz的前N-1行,Pz,2为Pz的后N-1行。对Ψz进行特征值分解,则其特征值即为 的对角线分量, 为Φz的估计值,特征向量矩阵 即为A1的估计值。Φz的形式为 diag表示将一个向量对角化运算。定义两个新的矩阵 其中Px,1为Px的前N-1行,Px,2为Px的后N-1行。则有 其中 为Φx的估计值,Φx的形式为 同理定义两个新的矩阵 其中Py,1为Py的前N-1行,Py,2为Py的后N-1行。则有 其中 为Φy的估计值,Φy的形式为
步骤4:方位角和俯仰角估计
设 分别为 的第k个对角线分量,则方位角和俯仰角的估计值 分别为 其中angle表示取幅角运算,atan表示取反正切运算。
结合上述步骤中的实施方式,对本发明的有效性进行仿真验证如下:
仿真中取N=8,即2-L型阵列共有22个阵元,阵列间距d=0.5λ,其中λ为信号波长,对于每次仿真实验取快拍数为200,进行M=500次蒙特卡洛仿真。
仿真实验1:假设有K=2个等功率非相关信号入射到天线阵列,其中信噪比SNR=15dB,信号的方位角和俯仰角为 图2和图3显示了方位角估计直方图和俯仰角估计直方图。从图中可以看出,本文提出的算法能够清晰的分辨这两个来波信号,而不会出现角度模糊问题。
仿真实验2:假设有K=1个信号入射到天线阵列,信噪比SNR=10dB,其中信号的方位角和俯仰角均在10°~80°之间以2°的步长变化。图4为不同角度组合估计联合均方误差图。
仿真实验3:假设有K=2个等功率非相关信号入射到天线阵列,其中信噪比SNR在5dB~30dB之间以5dB的步长变化,信号的方位角和俯仰角为 图5和图6分别为方位角和俯仰角估计均方误差随信噪比的变化情况。从图中可以看出,随着信噪比的增加,方位角和俯仰角均方误差均减小。
基于传播算子的2-L型阵列二维DOA估计算法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0