








专利摘要
本实用新型公开了一种双落体绝对重力仪及测试方法,该双落体绝对重力仪包括支架、激光干涉仪、两个真空落体仓和数据采集器,激光干涉仪安装于支架上,两个真空落体仓分别设置于激光干涉仪的上下方,两个真空落体仓相对靠近的一端均设有能够透过光束的透视窗口,且二者内部均具有可相对其仓体自由落体的棱镜,激光干涉仪用于分别向两个真空落体仓的透视窗口发射竖直的光束,并分别接收由两个棱镜反射的光束,数据采集器与激光干涉仪电连接,用于采集激光干涉仪测得的两个棱镜的下落距离差值。优点:该装置去掉了传统绝对重力仪中结构最复杂的超低频隔振装置,解决了现有绝对重力仪受地面震动影响测量精度的技术问题。
权利要求
1.一种双落体绝对重力仪,其特征在于:包括支架(1)、激光干涉仪(2)、两个真空落体仓(3)和数据采集器(4),所述激光干涉仪(2)安装于所述支架(1)上,两个所述真空落体仓(3)分别设置于所述激光干涉仪(2)的上下方,两个所述真空落体仓(3)相对靠近的一端均设有能够透过光束的透视窗口,且二者内部均具有可相对其仓体自由落体的棱镜(35),所述激光干涉仪(2)用于分别向两个所述真空落体仓(3)的透视窗口发射竖直的光束,并分别接收由两个所述棱镜(35)反射的光束,所述数据采集器(4)与所述激光干涉仪(2)电连接,用于采集激光干涉仪(2)测得的两个棱镜(35)的下落距离差值。
2.根据权利要求1所述的一种双落体绝对重力仪,其特征在于:所述支架(1)包括台面(11)和至少三条竖直且间隔装配于台面(11)下端的支腿(12),所述激光干涉仪(2)安装于所述台面(11)上端,两个所述真空落体仓(3)分别安装于所述激光干涉仪(2)上以及所述台面(11)的下端。
3.根据权利要求2所述的一种双落体绝对重力仪,其特征在于:所述支腿(12)的下端分别装配有用于调节其高度的支撑结构(121)。
4.根据权利要求1所述的一种双落体绝对重力仪,其特征在于:所述真空落体仓(3)包括封闭的仓体(31)、放置台(32)和移动机构,所述仓体(31)上连接有用于对其内部抽真空的离子泵(33),所述放置台(32)置于所述仓体(31)内对应去透视窗口的位置,其上开有上下透光的窗口,所述棱镜(35)搁置于所述放置台(32)上端窗口区域,所述移动机构与所述放置台(32)传动连接,用于驱使所述放置台(32)在所述仓体(31)内竖直上下移动。
5.根据权利要求4所述的一种双落体绝对重力仪,其特征在于:所述移动机构包括电机(34)、传送带、主动轮和被动轮,所述电机(34)安装于所述仓体(31)侧壁下端,其驱动轴水平伸入所述仓体(31)内部,所述主动轮同轴装配于所述驱动轴伸入仓体(31)内的一端,所述被动轮可转动的安装于所述仓体(31)内部的上端对应所述主动轮的位置,所述传送带环绕过所述主动轮和被动轮,所述放置台(32)置于所述传送带前侧,并与传送带前侧的带体连接固定。
6.根据权利要求5所述的一种双落体绝对重力仪,其特征在于:所述移动机构还包括导轨组件,所述导轨组件竖直安装于所述仓体(31)内,所述放置台(32)可上下滑动的安装于所述导轨组件上。
说明书
技术领域
本实用新型涉及重力测试技术领域,特别涉及一种双落体绝对重力仪。
背景技术
传统的绝对重力仪均采用自由落体加光学干涉的方式来测量重力加速度g,测试光路中包含有测试棱镜和参考棱镜,在测量过程中,测试棱镜作自由落体运动,不受震动影响;但参考棱镜会受到震动影响引起测试光程的变化,对测量带来干扰。因此,必须对参考棱镜采取相应的稳定措施,以抑制震动干扰。影响参考棱镜的震动源主要包括地脉动及人为活动等,人为活动由于频率较高易于隔离,但地脉动成分非常丰富,主要表现为频带宽,振幅范围大等,当前的隔震技术很难将其完全隔离,因此无法保证参考棱镜处于绝对静止的状态,及无法完全消除测试过程中震动带来的干扰。
实用新型内容
本实用新型所要解决的技术问题是提供一种双落体绝对重力仪及测试方法,有效的克服了现有技术的缺陷。
本实用新型解决上述技术问题的技术方案如下:
提供一种双落体绝对重力仪,包括支架、激光干涉仪、两个真空落体仓和数据采集器,上述激光干涉仪安装于上述支架上,两个上述真空落体仓分别设置于上述激光干涉仪的上下方,两个上述真空落体仓相对靠近的一端均设有能够透过光束的透视窗口,且二者内部均具有可相对其仓体自由落体的棱镜,上述激光干涉仪用于分别向两个上述真空落体仓的透视窗口发射竖直的光束,并分别接收由两个上述棱镜反射的光束,上述数据采集器与上述激光干涉仪电连接,用于采集激光干涉仪测得的两个棱镜的下落距离差值。
本实用新型的有益效果是:去掉了传统绝对重力仪中结构最复杂的超低频隔振装置,解决了现有绝对重力仪受地面震动影响测量精度的技术问题。
在上述技术方案的基础上,本实用新型还可以做如下改进。
进一步,上述支架包括台面和至少三条竖直且间隔装配于台面下端的支腿,上述激光干涉仪安装于上述台面上端,两个上述真空落体仓分别安装于上述激光干涉仪上以及上述台面的下端。
采用上述进一步方案的有益效果是支架结构简单,各个部件布置合理,能够顺利进行两个棱镜的异步下落。
进一步,上述支腿的下端分别装配有用于调节其高度的支撑结构。
采用上述进一步方案的有益效果是便于调整台面的高度,以便适应装置测试的条件要求,并且,能够确保整个台面保持水平,从而使得测试结果精准。
进一步,上述真空落体仓包括封闭的仓体、放置台和移动机构,上述仓体上连接有用于对其内部抽真空的离子泵,上述放置台置于上述仓体内对应去透视窗口的位置,其上开有上下透光的窗口,上述棱镜搁置于上述放置台上端窗口区域,上述移动机构与上述放置台传动连接,用于驱使上述放置台在上述仓体内竖直上下移动。
采用上述进一步方案的有益效果是设计合理,操作使用方便。
进一步,上述移动机构包括电机、传送带、主动轮和被动轮,上述电机安装于上述仓体侧壁下端,其驱动轴水平伸入上述仓体内部,上述主动轮同轴装配于上述驱动轴伸入仓体内的一端,上述被动轮可转动的安装于上述仓体内部的上端对应上述主动轮的位置,上述传送带环绕过上述主动轮和被动轮,上述放置台置于上述传送带前侧,并与传送带前侧的带体连接固定。
采用上述进一步方案的有益效果是移动机构设计合理,操作简单方便,能确保放置台的有效移动,从而实现棱镜的良好自由落体。
进一步,上述移动机构还包括导轨组件,上述导轨组件竖直安装于上述仓体内,上述放置台可上下滑动的安装于上述导轨组件上。
采用上述进一步方案的有益效果是该设计利于放置台平稳、良好的上下移动。
附图说明
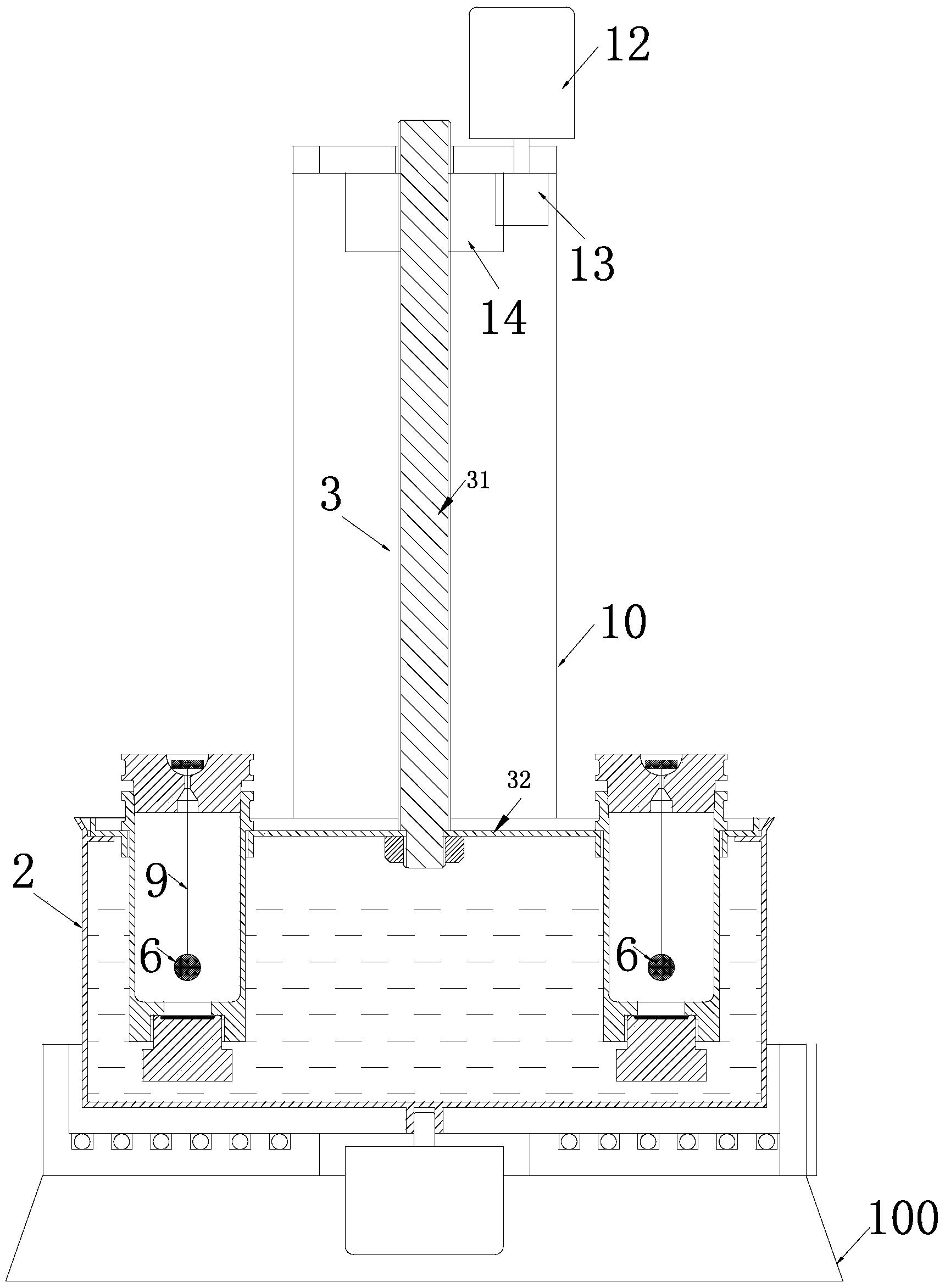
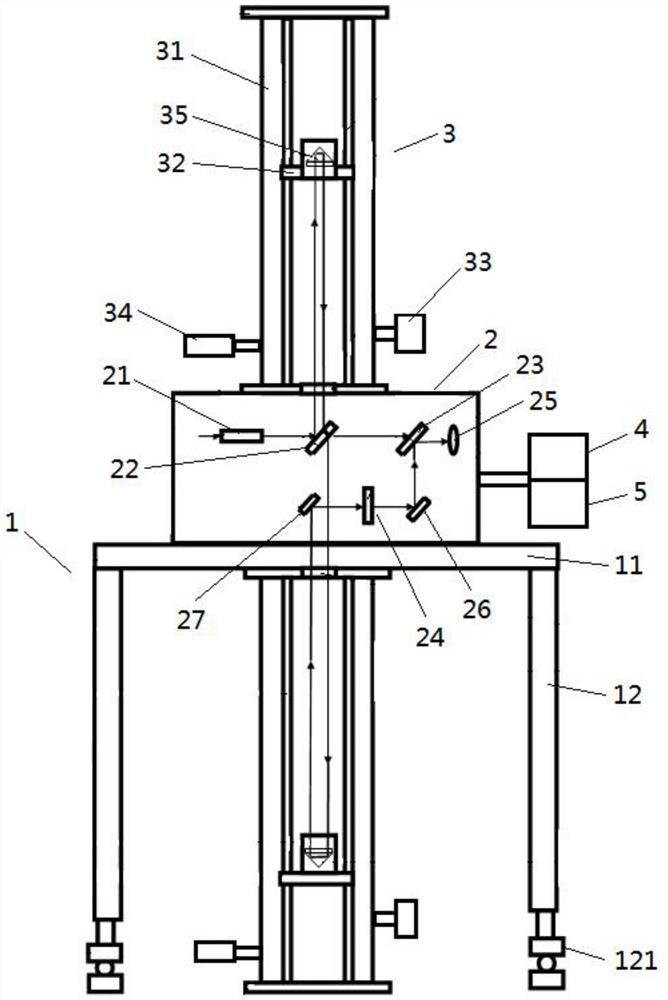
图1为本实用新型的双落体绝对重力仪的结构示意图;
附图中,各标号所代表的部件列表如下:
1、支架,2、激光干涉仪,3、真空落体仓,4、数据采集器,5、控制器,11、台面,12、支腿,31、仓体,32、放置台,33、离子泵,34、电机, 35、棱镜,121、支撑结构。
具体实施方式
以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
实施例:如图1所示,本实施例的双落体绝对重力仪包括支架1、激光干涉仪2、两个真空落体仓3和数据采集器4,上述激光干涉仪2安装于上述支架1上,两个上述真空落体仓3分别设置于上述激光干涉仪2的上下方,两个上述真空落体仓3相对靠近的一端均设有能够透过光束的透视窗口,且二者内部均具有可相对其仓体自由落体的棱镜35,上述激光干涉仪2用于分别向两个上述真空落体仓3的透视窗口发射竖直的光束,并分别接收由两个上述棱镜35反射的光束,上述数据采集器4与上述激光干涉仪2电连接,用于采集激光干涉仪2测得的两个棱镜35的下落距离差值。
更具体的,激光干涉仪2采用市面上常规的仪器,其内部光学精品分布略作调整,如图1中,包括扩束镜21、分束镜22、合束镜23、移光镜24、光电二极管25、第二反射镜26和第一反射镜27,其中分束镜22用于向上及向下分出两束光束,并且接受从上方棱镜35向下反射的竖直光束,扩束镜21用于向分束镜22发出一束光束,第一反射镜27用于接受下方的棱镜 35向上反射的竖直光束,移光镜24用于接收第一反射镜27向其反射的光束,并传递至第二反射镜26,再由第二反射镜26反射给合束镜23,合束镜23 将两路反射光束合成一束光并发射至光电二极管25接收。
测试方法包括以下步骤:
S1、预先将两个真空落体仓3内的棱镜35在仓内向上移动至各自的落体初始位置;
S2、开启激光干涉仪2,先使下方真空落体仓3内的棱镜35自由落体,且记录其落体时间,并在其落体一定时间且未结束落体过程时,使上方真空落体仓3内的棱镜35自由落体;
S3、通过数据采集器4采集到的两个棱镜35均处于自由下落阶段在任意一个时间点的下落距离差SB-A及对应的时间,利用以下公式计算得出绝对重力差值gA0:
其中,t1为上方的棱镜35自由落体的初始时间点,t2为下方的棱镜35 自由落体的结束时间点,l为两个棱镜35分别在初始位置时的高度距离差,γ为垂直重力梯度值;
与现有技术相比,本实用新型具有下列优点和积极效果:
①去掉了传统绝对重力仪中结构最复杂的超低频隔振装置;
②采用两个角锥棱镜先后自由下落,两个角锥棱镜均处于自由落体状态,与地面震动无关,从根本上解决了现有绝对重力仪受地面震动影响测量精度的技术问题。
作为一种优选的实施方式,上述支架1包括台面11和至少三条竖直且间隔装配于台面11下端的支腿12,上述激光干涉仪2安装于上述台面11 上端,两个上述真空落体仓3分别安装于上述激光干涉仪2上以及上述台面 11的下端,更具体的,台面11可以是镂空的三角框架台面,也可以是透明的盘状台面,以便光束能够顺利的穿过。
更佳的,上述支腿12的下端分别装配有用于调节其高度的支撑结构 121,利于台面11高度的调整,使其处于便于测试的高度。
上述支撑结构121一般采用市面上常规的调节旋柱,当然,也可以是其他具有同类似效果的产品或结构。
作为一种优选的实施方式,上述真空落体仓3包括封闭的仓体31、放置台32和移动机构,上述仓体31上连接有用于对其内部抽真空的离子泵33,上述放置台32置于上述仓体31内对应去透视窗口的位置,其上开有上下透光的窗口,上述棱镜35搁置于上述放置台32上端窗口区域,上述移动机构与上述放置台32传动连接,用于驱使上述放置台32在上述仓体31内竖直上下移动,试验时,预先通过移动机构将放置台32连带棱镜35移动至自由落体的初始位,自由落体前,通过移动机构快速将放置台32向下移动(放置台32移动速度大于棱镜35自由落体的速度),从而使得棱镜35能够良好的自由落体,其设计合理,操作使用方便、简单。
仓体31最佳的设计为圆柱状仓体,两个仓体31同轴设置。
更佳的,上述移动机构包括电机34、传送带、主动轮和被动轮,上述电机34安装于上述仓体31侧壁下端,其驱动轴水平伸入上述仓体31内部,上述主动轮同轴装配于上述驱动轴伸入仓体31内的一端,上述被动轮可转动的安装于上述仓体31内部的上端对应上述主动轮的位置,上述传送带环绕过上述主动轮和被动轮,上述放置台32置于上述传送带前侧,并与传送带前侧的带体连接固定,操作时,通过电机34带动主动轮快速旋转,从而带动皮带转动,并带动放置台32快速移动,其设计简单,操作使用方便,运行比较平稳。
还包括控制器5,该控制器5作为激光干涉仪2的控制系统与激光干涉仪2连接,当然,该控制器5也可以与上述移动机构和离子泵33连接,用于控制真空落体仓3的运行。
作为一种优选的实施方式,上述移动机构还包括导轨组件,上述导轨组件竖直安装于上述仓体31内,上述放置台32可上下滑动的安装于上述导轨组件上,该导轨组件的设计使得放置台32能够沿竖直方向良好的移动,不会发生歪斜的现象,更不会发生阻碍棱镜35自由落体的现象。
上述导轨组件一般包括两根竖直且左右间隔分布的导杆,放置台32两侧设有供导杆穿过的孔位,或是放置台32通过与两个导杆滑动配合的滑块相对滑动连接。
以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种双落体绝对重力仪专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0