







专利摘要
本发明提供了一种无溯源参考条件下时间统一系统时间自主同步方法,测量时间统一系统输出时间与溯源参考之间的时间差数据;若系统正常,对时间差数据作最小二乘拟合,预测下一整点时刻时间统一系统输出时间与溯源参考时间之差,根据时间差数据的拟合函数计算得到频率控制量,对频率标准的频率进行调整;若系统异常,以最小二乘法求出时间差数据序列的拟合函数,预测下一调整周期内时间统一系统输出时间与溯源参考时间的时差,进而计算频率调整增量。本发明能够在时间溯源设备异常的条件下,依然与溯源参考时间保持高精度同步。
权利要求
1.一种无溯源参考条件下时间统一系统时间自主同步方法,其特征在于包括下述步骤:
步骤1,将搭建时间统一系统所需要使用的频率标准送到保持有UTC(k)的时间实验室或国家一级时间计量单位,由实验室或计量单位准确计量频率标准的频率稳定度σ
步骤2,由时间溯源设备测量得到时间统一系统输出时间与溯源参考之间的时间差数据;判断当前系统运行状态,若系统正常运行,则转入步骤3;若系统异常,则转入步骤7;
步骤3,对步骤2得到的时间差数据进行预处理,剔除奇异值;
步骤4,对时间差数据中已经剔除的数据位进行内插,保证时间差数据的连续性;
步骤5,对步骤4得到的时间差数据作最小二乘拟合,预测下一小时整点时刻时间统一系统输出时间与溯源参考时间之差;如果预测值超过设定的阈值,则进入步骤6;否则,返回步骤2;
步骤6,根据时间差数据的拟合函数y(t)=a
步骤7,以最小二乘法求出时间差数据序列的拟合函数,拟合函数y(t)=a
y
每一调整周期终止时刻的预测时差值记为y
y
其中N=0,1,2,3……是时间统一系统进入自主同步工作模式后经历的小时数;
步骤8,若|y
步骤9,以频率标准的万秒稳定度σ
步骤10,若y
2.根据权利要求1所述的无溯源参考条件下时间统一系统时间自主同步方法,其特征在于:所述的步骤1中,没有送检条件时,参照频率标准出厂说明书给出的频率稳定度及频偏。
3.根据权利要求1所述的无溯源参考条件下时间统一系统时间自主同步方法,其特征在于:所述的步骤2中,保证时间统一系统正常运行超过24小时,然后由时间溯源设备测量得到时间统一系统输出时间与溯源参考之间的时间差数据。
4.根据权利要求1所述的无溯源参考条件下时间统一系统时间自主同步方法,其特征在于:所述的步骤2中,时间统一系统连续输出数据,则视为系统正常运行,数据缺失2小时以上,则视为系统异常。
5.根据权利要求1所述的无溯源参考条件下时间统一系统时间自主同步方法,其特征在于:所述的步骤3中,以3倍标准差准则判别步骤2得到的时间差,剔除奇异值,并将奇异值以及发生的时刻记录到系统日志文件中。
说明书
技术领域
本发明涉及一种在无时间溯源参考条件下,时间统一系统时频信号与溯源参考时间自主同步的方法。
背景技术
时间统一系统是提供溯源参考时间信号和标准频率信号以实现整个系统的时间和频率的高精度同步,由各种电子设备组成的一套完整系统,简称“时统”。时统一般由频率标准、相位微调器、时间传递接收机、时间间隔计数器、数字钟、时频信号分配器和控制计算机等组成。高精度的时间统一系统一般配备原子钟作为频率标准。当原子钟自由振荡时,由于其固有频率老化特性或受其他环境因素的影响,原子钟输出的时间、频率信号具有明显的漂移特性。如果不对它们进行实时调整,时统输出的时间将逐渐偏离溯源参考时间。因此,时间统一系统为了提供溯源参考时间,必须对其输出的时频信号进行控制,使时统时间与国家溯源参考时间保持同步。在计量学的量值传递中,这种做法称为溯源。
现在的时统大多以授时型接收机、GNSS卫星共视、卫星双向时间传递或光纤时间传递等技术手段实现高精度的时间溯源。
为了实现时间溯源,时间统一系统首先用以上技术手段之一测量出时统时间与溯源参考时间的时差,根据时差结果,对原子钟输出的频率和相位进行精密的调整与控制,使时统时间与溯源参考时间同步。实现时间同步的调整与控制技术称为钟驾驭技术。实现对原子钟输出的频率和相位进行调整与控制的设备称为相位微调器。在高精度的时间应用场合,如守时与授时系统、卫星导航、航天和导弹试验、高速通信系统等,一般不采用“简单粗暴”的直接调整信号相位的方法,而是以不破坏原子钟稳定度为原则,结合原子钟的稳定度指标,使用最小化控制调整策略,保持输出的实时物理信号的准确度和稳定度,“缓步微调”信号频率,达到时间同步的目的。
在时间溯源设备工作稳定时,可以实时得到时统输出时间与溯源参考时间的时差,通过对原子钟的频率和相位进行精密的调整与控制,时间统一系统可以实现较高的时间同步精度。但当溯源参考时间异常,无法提供时差数据时,由于时统内频率标准固有的频率漂移特性,如果不对其进行调整与控制,时间统一系统输出的时间将逐渐与溯源参考时间偏离,造成系统失效。
发明内容
为了克服现有技术的不足,本发明提供一种无溯源参考条件下时间统一系统时间自主同步方法,能够使时间统一系统在时间溯源设备异常,无法确切获取时间统一系统时间与溯源参考时间时差的条件下,依然可以与溯源参考时间保持高精度同步,提高了无溯源参考时,时间统一系统的输出时间与溯源参考时间的同步精度。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1,将搭建时间统一系统所需要使用的频率标准送到保持有UTC(k)的时间实验室或国家一级时间计量单位,由实验室或计量单位准确计量频率标准的频率稳定度σy(τ)和频偏fd;
步骤2,由时间溯源设备测量得到时间统一系统输出时间与溯源参考之间的时间差数据;判断当前系统运行状态,若系统正常运行,则转入步骤3;若系统异常,则转入步骤7;
步骤3,对步骤2得到的时间差数据进行预处理,剔除奇异值;
步骤4,对时间差数据中已经剔除的数据位进行内插,保证时间差数据的连续性;
步骤5,对步骤4得到的时间差数据作最小二乘拟合,预测下一小时整点时刻时间统一系统输出时间与溯源参考时间之差;如果预测值超过设定的阈值,则进入步骤6;否则,返回步骤2;
步骤6,根据时间差数据的拟合函数y(t)=a0+a1t+a2t
步骤7,以最小二乘法求出时间差数据序列的拟合函数,拟合函数y(t)=a0+a1t+a2t
y0=y(86400+N×3600)=a0+a1×(86400+N×3600)+a2×(86400+N×3600)
每一调整周期终止时刻的预测时差值记为y1,
y1=y(86400+(N+1)×3600)=a0+a1×(86400+(N+1)×3600)+a2×(86400+(N+1)×3600)
其中N=0,1,2,3……是时间统一系统进入自主同步工作模式后经历的小时数;
步骤8,若|y0|>|y1|,则不调整频率标准的频率,维持当前时刻系统状态;若|y0|≤|y1|,转入步骤9;
步骤9,以频率标准的万秒稳定度σy(10k)作为频率调整增量,在系统异常后的每小时起始时刻调整频率标准输出信号的频率,并修正方程中的a1项,修正后的a1记为a1′,预测时差的拟合函数修正为y(t)=a0+a1′t+a2t
步骤10,若y0×y1>0,系统维持当前状态,若y0×y1≤0,则将频率控制量设置为fadj=-fd,直至系统恢复正常,转入步骤2。
所述的步骤1中,没有送检条件时,参照频率标准出厂说明书给出的频率稳定度及频偏。
所述的步骤2中,保证时间统一系统正常运行超过24小时,然后由时间溯源设备测量得到时间统一系统输出时间与溯源参考之间的时间差数据。
所述的步骤2中,时间统一系统连续输出数据,则视为系统正常运行,数据缺失2小时以上,则视为系统异常。
所述的步骤3中,以3σ准则判别步骤2得到的时间差,剔除奇异值,并将奇异值以及发生的时刻记录到系统日志文件中。
本发明的有益效果是:在无法获取与时间溯源参考时差的情况下,使时间统一系统输出的时频信号依然可以与时间溯源参考保持高精度的同步。同时,本发明提出的小量步进调整的控制策略,保证了系统可以平稳、连续的过渡到自主同步状态,避免了系统输出的时频信号因溯源链路中断,而引起的信号频率或相位的突变,致使系统失效的后果。
附图说明
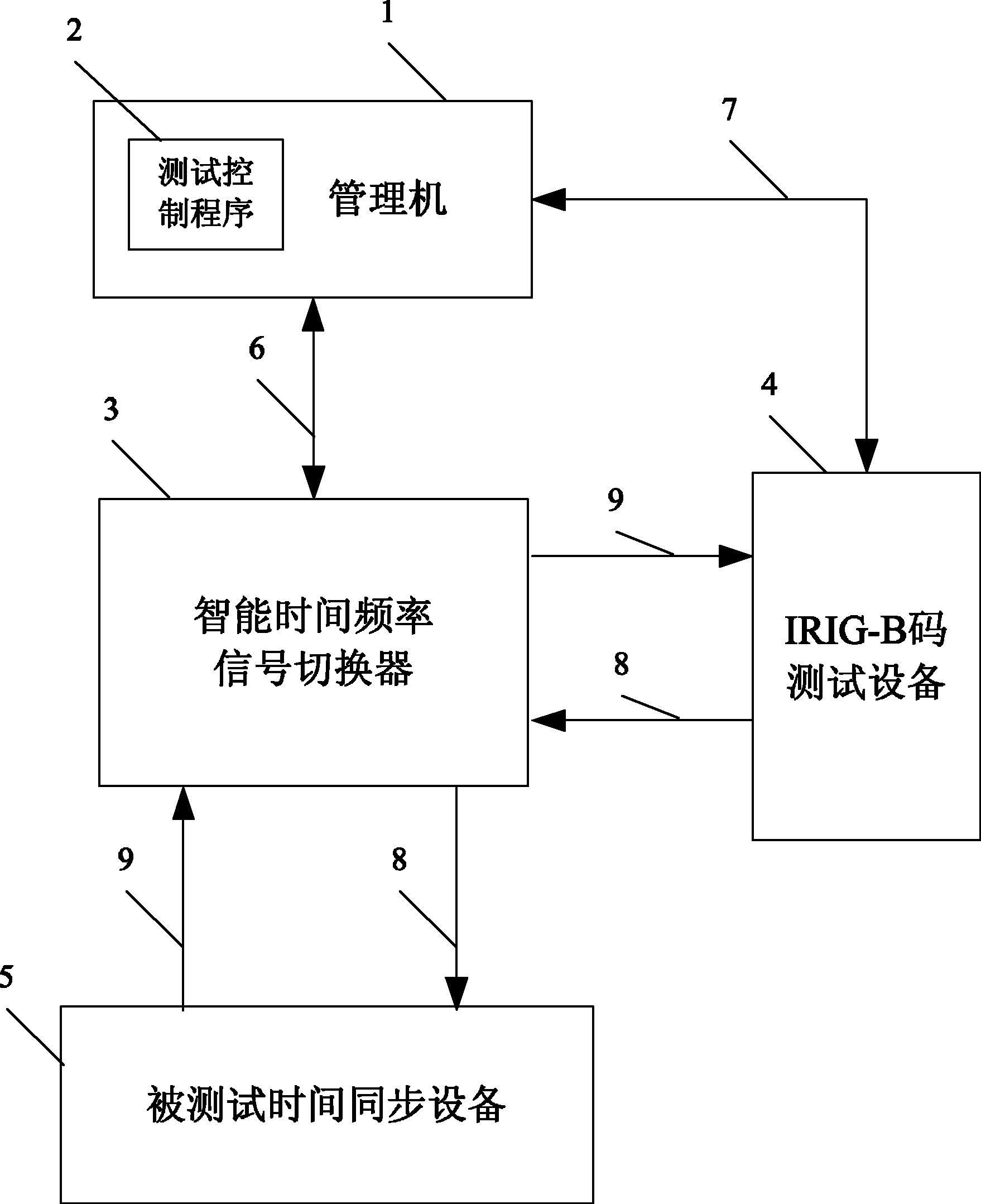
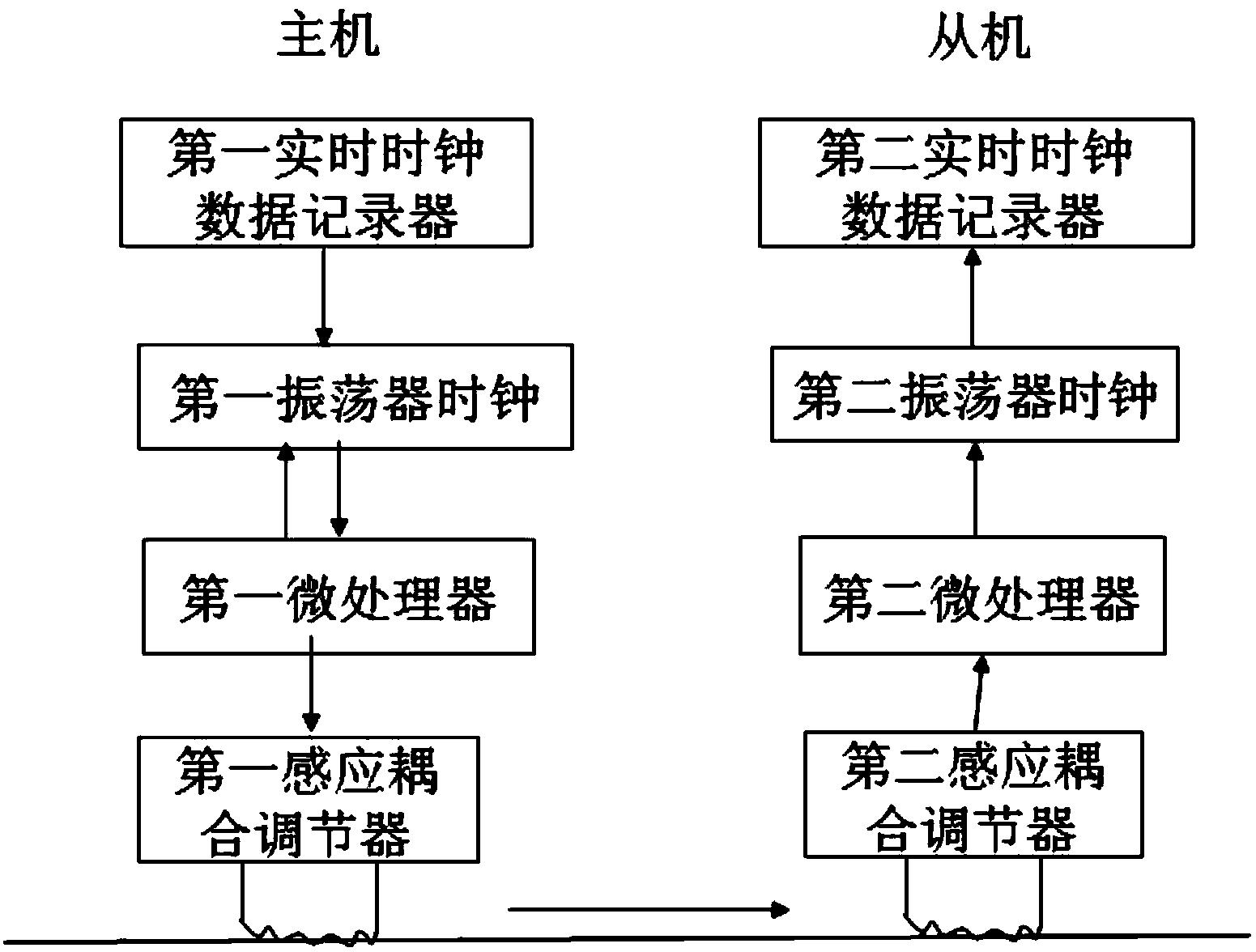
图1是时间统一系统原理图。
具体实施方式
下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
本发明的技术特征在于通过准确计量时间统一系统中频率标准的频率稳定度与漂移特性,在保持频率标准自身稳定度特性的同时,保证时间统一系统在溯源链路异常的条件下,维持与溯源参考时间的高精度同步。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1:将搭建时间统一系统所需要使用的频率标准(原子钟)送到保持有UTC(k)的时间实验室或国家一级时间计量单位,由实验室或计量单位准确计量频率标准的频率稳定度σy(τ)、频偏fd。没有送检条件时,参照频率标准出厂说明书给出的频率稳定度及频偏fd。
步骤2:当时间统一系统软硬件搭建完成后,保证系统正常运行超过24小时。由时间溯源设备测量得到时间统一系统输出时间与溯源参考之间的时间差。数据连续输出,视为系统正常运行,转入步骤3,数据缺失2小时以上,视为系统异常,转入步骤7,直到数据正常后转入步骤3。
步骤3:对步骤2中得到的时间差数据进行预处理。以3σ准则进行判别,剔除奇异值,并将奇异值以及发生的时刻记录到系统日志文件中。
步骤4:对时间差数据中已经剔除的数据进行内插,保证时间差数据的连续性,并将此时间差数据存储在控制计算机内。
步骤5:根据步骤4中得到的这组时间差数据作最小二乘拟合,求出拟合二次方程,并以此方程预测下一小时整点时刻时间统一系统输出时间与溯源参考时间之差。如果预测值超过系统设定的阈值(由系统频率标准性能决定),需要对频率标准的频率进行调整,转入步骤6。反之,不调整频率标准的频率,维持当前时刻系统状态。转入步骤2。
步骤6:根据步骤5中时差数据的拟合函数y(t)=a0+a1t+a2t
步骤7:当无法获取时间统一系统输出时间与溯源参考时间的时间差,时间统一系统进入自主同步的工作模式。根据系统异常时刻之前24小时的时差数据,以最小二乘法求出以上时差数据序列的拟合函数,拟合函数以二次多项式的形式表达:y(t)=a0+a1t+a2t
步骤8:若|y0|>|y1|,则不调整频率标准的频率,维持当前时刻系统状态,若|y0|≤|y1|,转入步骤9。
步骤9:以频率标准的万秒稳定度σy(10k)作为频率调整增量,在系统异常后的每小时起始时刻调整频率标准输出信号的频率,并修正方程中的a1项,修正后的a1记为a1′,预测时差的拟合函数修正为y(t)=a0+a1′t+a2t
步骤10:若y0×y1>0,系统维持当前状态,若y0×y1≤0,则将频率控制量设置为fadj=-fd,直至系统恢复正常。转入步骤2。
无溯源参考条件下时间统一系统时间自主同步方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0