








专利摘要
本发明公开了一种煤气化炉系统的炉温自学习控制方法,其包括:构建一个基于数据的煤气化炉系统炉温自学习系统模型,用于确定煤气化炉炉温变化;利用三层BP神经网络构建输入煤中元素含量比例的煤质模型,用于确定煤质;利用三层BP神经网络构建输入量参考控制模型,用于确定煤气化炉系统输入参考量;将构建的煤气化炉系统炉温自学习系统模型误差、煤质模型误差和输入量参考控制模型误差与系统外部扰动转化为煤气化炉系统炉温自学习系统控制模型的扰动控制变量;基于迭代自适应动态规划自学习最优控制方法,在所述扰动控制变量对所述系统温度控制误差影响最大的情况下建立求解最优控制的函数,最终获得系统控制。
权利要求
1.一种煤气化炉系统的炉温自学习控制方法,其包括:
S1、构建一个基于数据的煤气化炉系统炉温自学习系统模型,用于确定煤气化炉炉温变化;
S2、基于系统运行数据,利用三层BP神经网络构建输入煤中元素含量比例的煤质模型,用于确定煤质;
S3、基于系统运行数据,利用三层BP神经网络构建输入量参考控制模型,用于确定煤气化炉系统输入参考量;
S4、将构建的煤气化炉系统炉温自学习系统模型误差、煤质模型误差和输入量参考控制模型误差与系统外部扰动转化为煤气化炉系统炉温自学习系统控制模型的扰动控制变量;
S5、基于迭代自适应动态规划自学习最优控制方法,在所述扰动控制变量对所述系统温度控制误差影响最大的情况下建立求解最优控制的函数,最终获得系统的最优控制;其中所述最优控制表示使得煤气化炉炉温达到设定温度的煤气化炉的输入量。
2.如权利要求1所述的煤气化炉系统的炉温控制方法,其特征在于,在步骤S1中构建的煤气化炉系统炉温自学习系统模型表示为:
其中, 为构建所述煤气化炉系统炉温自学习系统模型使用的神经网络近似函数。 为煤气化炉系统炉温自学习系统模型中炉温的神经网络权值, 为煤气化炉系统炉温自学习系统模型中输出的神经网络权值,z(k)=[xT(k),uT(k),ΘT(k)]T为构建所述煤气化炉系统炉温自学习系统模型使用的神经网络的输入, 为k+1时刻煤气化炉系统炉温自学习系统模型的炉温值, 为k时刻煤气化炉系统炉温自学习系统模型的输出,x(k)为k时刻实际的炉温,u(k)为k时刻实际的各组分输入流量,Θ(k)为k时刻的实际煤质,σ(·)为训练系统控制模型使用的神经网络双极S型激活函数,如下表示:
3.如权利要求2所述的煤气化炉系统的炉温控制方法,其特征在于,所述神经网络权值 如下训练更新得到:
其中,lm1>0,lm2>0为神经网络的学习率, 为k+1时刻煤气化炉系统运行过程中测量得到的实际炉温和根据所述煤气化炉系统炉温自学习系统模型得到的炉温 的差值, 为k+1时刻煤气化炉系统运行过程中测量得到的实际输出y(k)和根据所述煤气化炉系统炉温自学习系统模型得到的输出 的差值。
4.如权利要求1所述的煤气化炉系统的炉温控制方法,其特征在于,所述煤质模型如下表示:
其中, 表示煤质模型输出, 表示煤质模型的神经网络近似函数, 为煤质模型神经网络权值,zΘ(k)=[xT(k),xT(k+1),yT(k),uT(k)]T为煤质模型输入,x(k)为k时刻的实际炉温,u(k)为k时刻的实际各组分输入流量,y(k)为k时刻煤气化炉的实际输出组分流量,σ(·)为训练煤质模型使用的神经网络双极S型激活函数,如下表示:
所述煤质模型的具体权值如下更新得到:
其中,lΘ>0是学习率, 为k时刻煤气化炉系统运行过程中测量得到的实际煤质Θ(k)和根据所述煤质模型输出的煤质 的差值;j=0,1,…,为迭代指标。
5.如权利要求1所述的煤气化炉系统的炉温控制方法,其特征在于,所述输入量参考控制模型如下所示:
其中, 表示输入量参考控制模型的输出, 表示参考控制函数, 为输入量参考控制模型神经网络权值,zu(k)=[xT(k),xT(k+1),ΘT(k)]T为输入量参考控制模型输入,x(k)为k时刻的实际炉温,Θ(k)为k时刻的实际煤质,σ(·)为训练输入量参考控制模型使用的神经网络双极S型激活函数,如下表示:
所述输入量参考控制模型权值更新如下:
其中,lu>0为神经网络学习率, 为k时刻煤气化炉系统运行过程中测量得到的实际输入量u(k)和所述输入量参考控制模型输出的输入量 的差值。
6.如权利要求1所述的煤气化炉系统的炉温控制方法,其特征在于,在步骤S4中转化后的煤气化炉系统炉温自学习系统的扰动控制变量使用如下所示的误差函数e(k)表示:
其中
其中,0≤cu≤1,0≤cΘ≤1为常数, 为输入参考控制模型。
7.如权利要求1所述的煤气化炉系统的炉温控制方法,其特征在于,在步骤S5中所建立的求解最优控制的函数如下所示:
其中,w*(e(k))为对系统性能影响达到最大时的系统扰动值; 为系统扰动取w*(e(k))时使得性能指标函数取得最小值时的煤气化炉系统炉温自学习系统输入;U(e(k),ue(k),w(k))为效用函数,e(k)为表示扰动控制变量的系统误差函数;ue(k)为系统输入;w(k)为扰动控制变量,J*(e(k))为离散时间HJI方程定义的最优性能指标函数,A、B、C为正定矩阵;k表示当前时刻k。
8.如权利要求1所述的煤气化炉系统的炉温控制方法,其特征在于,所建立的最优控制的函数如下求解:
步骤1、令i=0,对 定义初始迭代性能指标函数:
步骤2、根据初始迭代性能指标函数计算初始迭代扰动控制变量及初始迭代最优控制:
其中,ρ0(e(k))为初始迭代有界控制迭代误差。
步骤3、更新下一迭代性能指标函数:
步骤4、令i=i+1,计算第i次迭代的扰动控制变量:
步骤5、使用神经网络逼近其目标值获得第i次迭代的系统控制,系统控制 的表达式为:
其中,ρi(e(k))为第i次迭代的有界控制迭代误差;其目标值通过下式如下获得:
步骤6、使用神经网络函数逼近其目标值获得下一迭代性能指标函数,下一迭代性能指标函数表达式如下:
其中,πi(e(k))为有界性能指标函数迭代误差;其目标值如下获得:
步骤7、将 与wi(e(k))带入到 表达式中获得 并通过数值比较的方式获得迭代性能指标函数 与性能指标函数目标值Vi+1(e(k))之间的误差σ≥1,满足:
步骤8、根据下式获得参数γ,满足:
Vi+1(e(k+1))≤γU(e(k),ue(k),w(k));
步骤9、判断神经网络函数逼近得到的 的收敛性,若收敛则转步骤继续计算,直到 否则减小有界控制迭代误差ρi(e(k))与性能指标函数迭代误差πi(e(k)),并转步骤重新求解。
说明书
技术领域
本发明属于煤气化炉技术领域,具体涉及煤气化炉的炉温控制方法,特别是一种通过气化炉系统的运行数据对气化炉炉温进行自学习最优控制的方法。
背景技术
煤气化炉亦称水煤浆煤气化炉,是一种以煤或焦炭为原料,以氧气和水蒸气为气化剂,在固定床内进行氧化还原反应产生混合煤气的专用设备,可广泛应用于冶金、机械、化工、建材、陶瓷等各类行业。其工作过程:水煤浆被泵压入喷嘴,在此处被高压、高速的氧气流破碎雾化进入煤气化炉。在煤气化炉内,雾状水煤浆和氧气在加温加压后,经过预热、水分蒸发、煤的干馏与热解以及气化物的裂解燃烧等一系列的复杂物理化学过程,最终形成以氢气、一氧化碳、二氧化碳和水蒸气为主要成分的粗煤气以及煤渣。粗煤气经过洗剂、冷却和净化得到精煤气,煤渣则在炉内反应结束后进入气化炉底部渣池,经过水浴、淬冷、固化后运往渣仓,定期处理排放。
煤气化炉是一种用煤制取煤气的重要设备,是煤气化制甲醇、甲醛等煤基化工过程中非常重要的基础环节,具有工艺流程复杂、设备庞大、反应滞后等特点。一方面通过煤气化的主要工作机理分析煤气化炉的工作动态,另一方面要根据煤气化炉运行特性对气化炉温度等重要参数进行最优调控,优化气化炉运行,提高煤气化炉系统运行效率并避免不必要的事故发生。然而在实际生产过程中,煤气化炉设备庞大,炉内温度高,反应剧烈以及时滞现象严重等使得气化炉的数学机理模型难以建立,这给气化炉系统优化与控制带来极大的困难。在气化炉系统每日运行过程中都会存储大量的数据,因此基于气化炉系统的运行数据,设计一套有效的最优控制方案,使得煤气化炉系统能够智能调控在最优工作状态是煤气化炉控制技术发展亟需解决的问题。
发明内容
(一)要解决的技术问题
本发明所要解决的技术问题是利用气化炉系统运行数据与神经网络,构建煤气化炉系统控制神经网络模型,煤质神经网络模型以及参考控制神经网络模型,采用基于自适应动态规划自学习方法,最优化控制煤气化炉的炉温工作状态。
(二)技术方案
基于煤气化系统生产过程的运行数据,利用自适应动态规划理论,构建煤气化炉系统炉温控制神经网络模型、煤中元素含量比例的模型(煤质神经网络模型)以及参考控制神经网络模型,综合考虑建模误差以及外部扰动,采用迭代自适应动态规划方法在扰动控制对系统性能影响最大情况下获得系统最优控制方案并获得容许误差上界,实现气化炉系统温度最优化运行。
具体来说,本发明提出一种煤气化炉系统的炉温自学习控制方法,其包括:
S1、构建一个基于数据的煤气化炉系统炉温自学习系统模型,用于确定煤气化炉炉温变化;
S2、基于系统运行数据,利用三层BP神经网络构建输入煤中元素含量比例的煤质模型,用于确定煤质;
S3、基于系统运行数据,利用三层BP神经网络构建输入量参考控制模型,用于确定煤气化炉系统输入参考量;
S4、将构建的煤气化炉系统炉温自学习系统模型误差、煤质模型误差和输入量参考控制模型误差与系统外部扰动转化为煤气化炉系统炉温自学习系统控制模型的扰动控制变量;
S5、基于迭代自适应动态规划自学习最优控制方法,在所述扰动控制变量对所述系统温度控制误差影响最大的情况下建立求解最优控制的函数,最终获得系统的最优控制;其中所述最优控制表示使得煤气化炉炉温达到设定温度的煤气化炉的输入量。
(三)有益效果
本发明根据煤气化炉系统运行数据,构建气化炉系统的神经网络模型,综合考虑建模误差以及外部扰动,采用迭代自适应动态规划方法在扰动控制对系统性能影响最大情况下获得系统最优控制方案,从而能够高效、实时、最优化控制气化炉温度,实现气化炉系统最优化运行。
附图说明
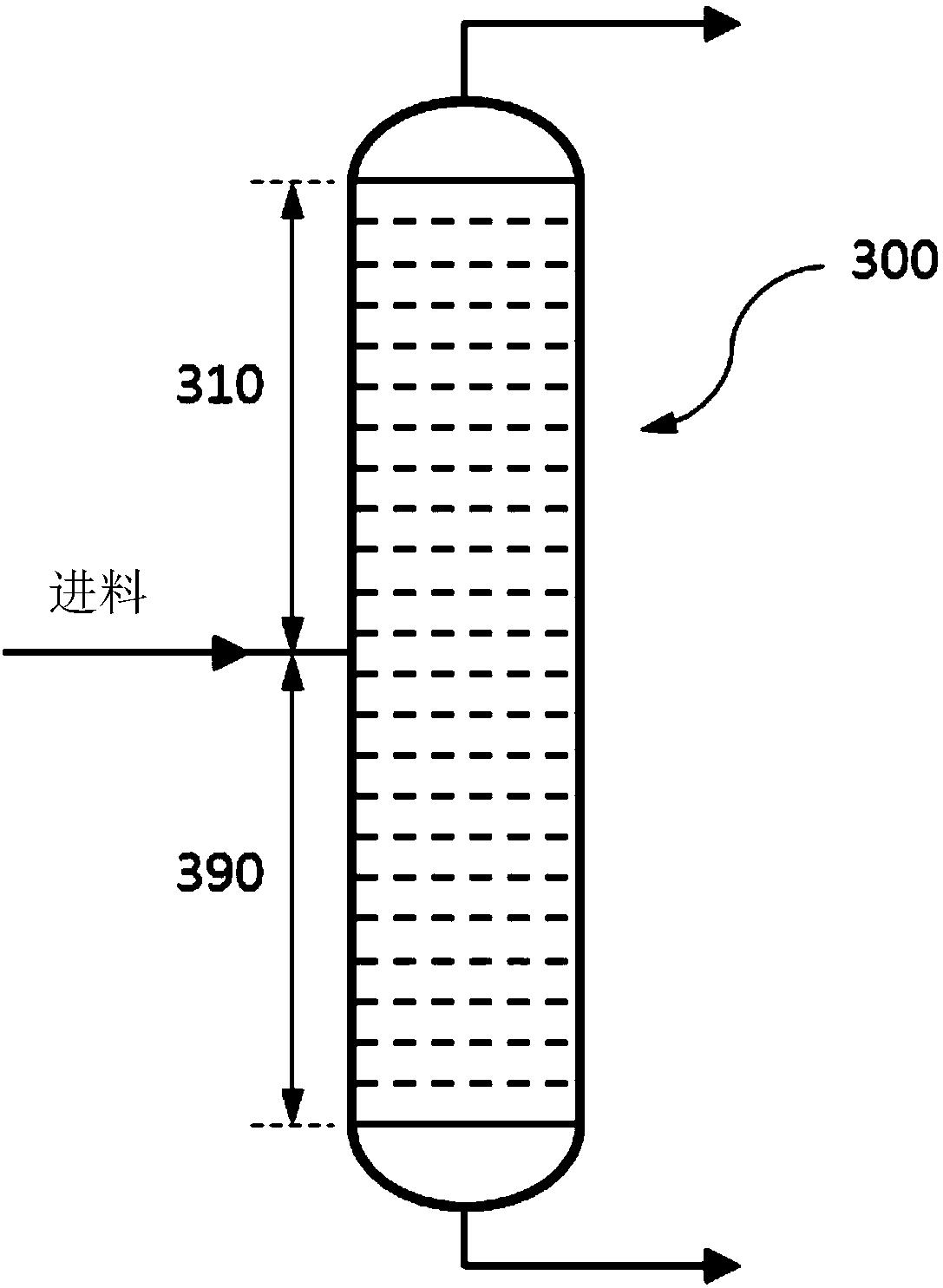
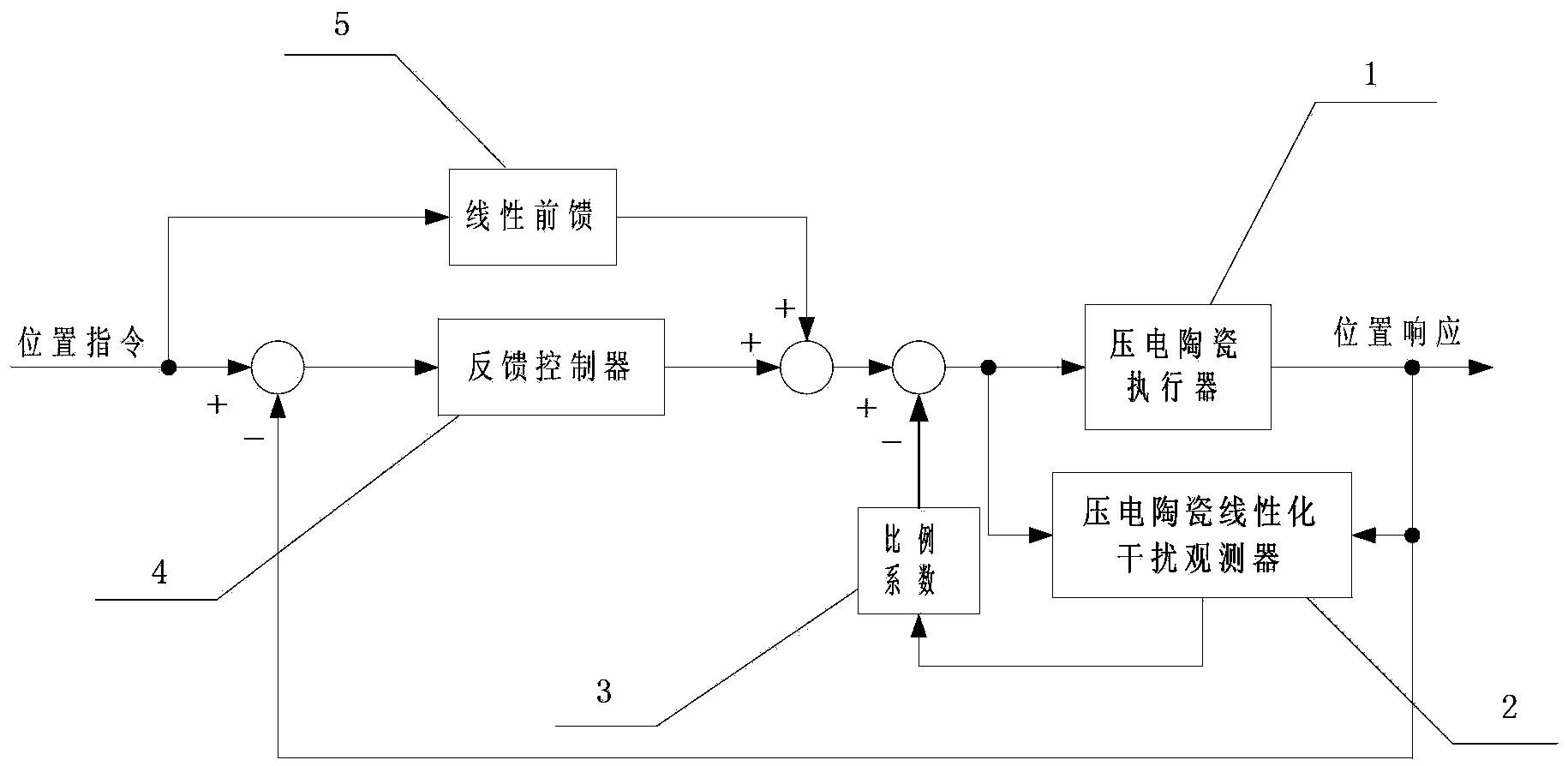
图1是本发明实施例中煤气化炉的结构示意图;
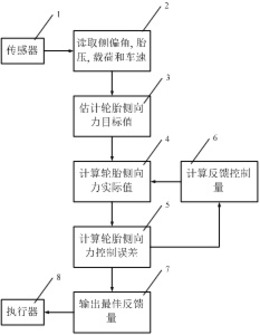
图2是本发明实施例中一种煤气化炉系统的炉温自学习控制方法流程图;
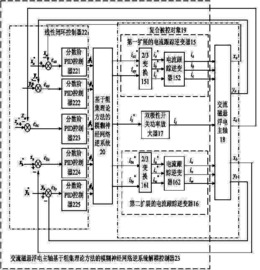
图3是本发明实施例中迭代自适应动态规划自学习最优控制方法流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明作进一步的详细说明。
图1是本发明中煤气化炉的结构示意图。如图1所示,煤气化炉1包括进料口2、煤气出口3和煤渣出口4,其中水煤浆和氧气经过进料口2进入煤气化炉1后,在一定温度和压力下,发生一系列复杂的物理化学反应,生成以CO(一氧化碳)、CO2(二氧化碳)、H2(氢气)为主要成分的粗煤气,经过煤气出口3输出,反应后的煤渣从出口4排出。需要说明的是,该图1只是示意性的简图,实际的煤气化炉还包括其他各工作部件,例如调节阀及压力杆等,但其皆为本领域的技术人员熟知,并且不影响本发明的控制方法,因而在此不加赘述。
图2示出了本发明中煤气化炉系统的炉温自学习控制方法流程图。如图2所示,该方法包括依次执行的如下步骤:
S1、构建一个基于数据的煤气化炉系统炉温自学习系统模型,用于确定煤气化炉炉温变化;
S2、基于系统运行数据,利用三层BP神经网络构建输入煤中元素含量比例的煤质模型,用于确定煤质;
S3、基于系统运行数据,利用三层BP神经网络构建输入量参考控制模型,用于确定煤气化炉系统输入参考量;
S4、将构建的煤气化炉系统炉温自学习系统模型误差、煤质模型误差和输入量参考控制模型误差与系统外部扰动转化为煤气化炉系统炉温自学习系统控制模型的扰动控制变量,即误差函数;
S5、基于迭代自适应动态规划自学习最优控制方法,在所述扰动控制变量对所述系统温度控制误差影响最大的情况下建立求解最优控制的方程,所述最优控制表示使得煤气化炉炉温达到设定温度的煤气化炉的输入量。
下面分别介绍上述各个步骤。
S1、构建一个基于数据的煤气化炉系统炉温自学习系统模型,该模型利用神经网络构建煤气化炉系统炉温动态特性,无需煤气化炉系统炉温具体数学模型。
本发明的煤气化炉系统控制模型基于煤气化炉前期运行积累的数据利用人工神经网络进行构建,无需煤气化炉的具体反应机理模型。
根据煤气化炉系统内部的反应原理,按照前期煤气化炉运行时得到的相关历史数据,包括系统输入变量、输出变量以及系统状态变量,利用人工神经网络构建煤气化炉系统的控制模型。稳态建模具体描述如下:假定煤气化炉进料口2的原料为O2(氧气)、H2O(水)和煤,其中煤的主要成分为C(碳)、H(氢)、O(氧),要求构建相应的控制模型,预测未来煤气化炉内的温度变化,计算出料口3生成气中的CO(一氧化碳)、CO2(二氧化碳)、H2(氢气)、H2O(水)的量以及出口4排放煤渣的量。
煤气化过程中,煤气化炉1的进料口2的进料为水煤浆和氧气,煤气出口3输出粗煤气,煤渣出口4输出煤渣。水煤浆和氧气进入煤气化炉1后,在一定的温度和压力下,经过一系列复杂的物理化学反应,生成以一氧化碳、二氧化碳、氢气为主要成分的粗煤气。
煤气化炉中主要考虑的化学反应如下:
(1)氧化反应
(2)变换反应
C+H2O=CO+H2
CO+H2O=CO2+H2
注:因为在实际生产中所采用的工艺条件下,原料中含有的其他一些元素如氮(N)、硫(S)、氯(C1)等属于微量元素并且对整个变换反应的影响较小,所以可以只选择考虑氧化反应和变换反应。根据煤气化炉中反应的化学方程式,可逆变换反应的平衡条件只与温度有关,利用人工神经网络理论,在获得一段时间内煤气化炉输入输出物料的数据以及气化炉内状态变量的基础上,不需要具体的机理模型,即可构建煤气化炉系统的控制模型。
所构建的煤气化炉系统的系统控制模型的输入数据为当前k时刻煤、水、氧气的输入流量 其中ucoal(k)为煤的流量(千克/小时), 为水的流量(千克/小时), 为氧气的流量(千克/小时)。定义煤气化炉内当前时刻温度为x(k)(摄氏度℃),当前时刻煤质组分Θ(k)=[θC(k),θH(k),θO(k),θChar(k)],θC(k)为煤中碳的质量百分比,θH(k)为煤中氢的质量百分比,θO(k)为煤中氧的质量百分比,θChar(k)为煤中煤焦的质量百分比;输出数据为下一时刻k+1煤气化炉内温度x(k+1)(摄氏度℃)以及当前时刻气化炉各组分输出流量
其中yCO(k)为一氧化碳输出流量(千克/小时), 为二氧化碳输出流量(千克/小时), 为氢气输出流量(千克/小时), 为水蒸气输出流量(千克/小时),yChar(k)为煤焦输出流量(千克/小时)。煤气化炉系统的炉温控制模型的函数表示为:
其中F,G为未知气化炉系统函数。煤气化炉系统的系统控制模型构建采用三层反向传播(BP)神经网络进行构建。
BP神经网络的结构包括输入层、隐层和输出层三层结构,激活函数为双极S型函数。令隐含层神经元个数为L。令输入层与隐含层权值矩阵为Y。令隐含层与输出层权值矩阵为W。令神经网络的输入为X,那么神经网络的输出可以表示为
其中
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0