









专利摘要
本发明公开了一种基于脉冲激光重复捕获微球的系统及方法。左光纤接于左光耦合器输入侧,左光耦合器输出侧经左熔接光纤连接,左熔接光纤与毛细管熔接,毛细管与右熔接光纤熔接,右熔接光纤与右光耦合器输出侧连接,右光耦合器输入侧与右光纤连接;左连续激光与右连续激光同时对向发射至毛细管内部形成光阱捕获区域;左右脉冲激光作用于微球上,调节右脉冲激光的功率,使得左脉冲激光与右脉冲激光同时作用于微球,微球弹起脱离原位置移动到光阱捕获区域内部,进而实现微球稳定捕获。本发明采用脉冲激光使微球脱离微腔表面,进入光阱捕获区域,实现微球的起支和捕获,实现单粒的重复捕获,无需重复加载微粒,可应用于空气、真空等环境。
权利要求
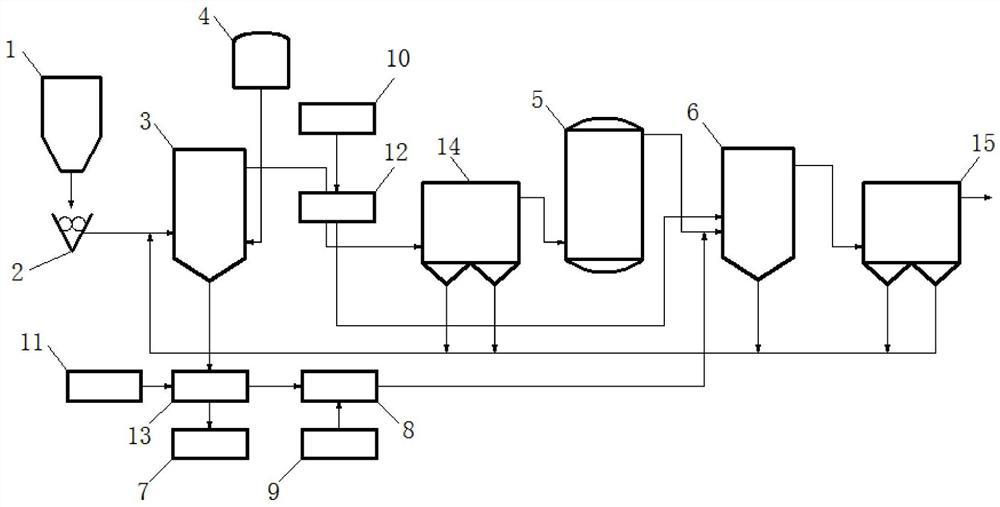
1.一种基于脉冲激光重复捕获微球的系统,其特征在于:包括左第一光纤(S1)、左第二光纤(S10)、左光耦合器(S2)、左熔接光纤(S3)、毛细管(S4)、微球(S9)、右熔接光纤(S5)、右光耦合器(S6)、右第一光纤(S7)与右第二光纤(S8);左第一光纤(S1)与左第二光纤(S10)分别连接于左光耦合器(S2)输入侧的两端,左光耦合器(S2)输出侧的一端经左熔接光纤(S3)的一端连接,左熔接光纤(S3)另一端与毛细管(S4)一端熔接,微球(S9)位于毛细管(S4)内部,毛细管(S4)另一端与右熔接光纤(S5)的一端熔接,右熔接光纤(S5)另一端与右光耦合器(S6)输出侧的一端连接,右光耦合器(S6)输入侧的两端分别与右第一光纤(S7)、右第二光纤(S8)连接;
所述的毛细管(S4)采用二氧化硅毛细管,孔径尺寸大于微球直径;
所述的左熔接光纤(S3)、毛细管(S4)与右熔接光纤(S5)熔接拼接形成封闭的微腔结构。
2.如权利要求1所述一种基于脉冲激光重复捕获微球的系统,其特征在于:
所述的毛细管(S4)内表面完全干净,可以是真空或者充满气体、充满液体环境。
3.一种基于脉冲激光重复捕获微球的方法,其特征在于包括如下步骤:
步骤1、左连续激光(S11)经过左第一光纤(S1)输入至左光耦合器(S2),左光耦合器(S2)将左连续激光(S11)耦合入左熔接光纤(S3)发射至毛细管(S4)内部;同时,右连续激光(S13)经过右第一光纤(S7)输入至右光耦合器(S6),右光耦合器(S6)将右连续激光(S13)耦合入右熔接光纤(S5)发射至毛细管(S4)内部;左连续激光(S11)与右连续激光(S13)同时对向发射至毛细管(S4)内部形成光阱捕获区域(S12);
步骤2、左脉冲激光(S14)经过左第一光纤(S1)输入至左光耦合器(S2),左光耦合器(S2)将左脉冲激光(S14)耦合入左熔接光纤(S3)发射至毛细管(S4)内部并照射到微球(S9)上,使得左脉冲激光(S14)作用于微球(S9)上;同时,右脉冲激光(S15)经过右第一光纤(S8)输入至右光耦合器(S6),右光耦合器(S6)将右脉冲激光(S15)耦合入右熔接光纤(S5)发射至毛细管(S4)内部并照射到微球(S9)上,使得右脉冲激光(S15)作用于微球(S9)上;调节右脉冲激光(S15)的功率,使得左脉冲激光(S14)与右脉冲激光(S15)同时作用于微球(S9),微球(S9)弹起脱离原位置移动到光阱捕获区域(S12)内部,进而实现微球(S9)稳定捕获;
步骤3、微球(S9)脱离光阱捕获区域(S12)内部后,重复上述步骤,在不更换微球(S9)的情况下实现微球(S9)重复捕获。
说明书
技术领域
本发明属于光学工程以及微颗粒悬浮领域的一种微球捕获系统和方法,具体是涉及一种基于脉冲激光重复捕获微球的系统及方法。
背景技术
光悬浮测量技术近年来不断完善,测量要求越来越高,微球的精确控制与重复起抛一直是光悬浮测量技术的难点。传统的微粒起抛方式采用压电陶瓷以机械高频振动的方式将微球脱离载体表面,或使用超声雾化起抛微球。这两种方式都需要在自由空间中抛洒大量微球,无法精确控制落入光阱中微球的数量,并且需要不断添加新的微球。由于微球进入光阱范围存在一定概率,因此捕获效率低,造成大量微球的浪费,多余的微球会污染真空腔内部。因而在光悬浮测量领域急需快速,可重复、高精度的起支方法。
微球与物体表面存在黏附力,包括范德华力、毛细力和静电力等。当微球直径较大时,表面黏附力可忽略不计,为其当微球直径小于100微米时,其黏附力大小受环境湿度、基片表面形貌、微球和基片材料和几何特性等因素影响,为自身重力的10
在清洗领域,使用脉冲激光清除硅晶圆等基底材料表面附着的杂质微粒的方法已经被广泛采用。清洗原理是利用激光脉冲作用于基面,使基面产生膨胀。虽然膨胀量很小,但作用时间极短,一般为几十纳秒,可产生巨大的加速度克服黏附力推动微球。这些杂质微粒的直径在几十微米到几十纳米之间,材料有金属材料、有机材料和介电材料。起振脉冲激光在紫外波段,基面或微球对激发光的吸收率和热膨胀系数较大,在不损伤基底的前提下可实现高达百分之百的清除效率。微粒起抛杂质后的速度与位置,取决于单个脉冲激光的能量和基板表面特性:在清洗阈值以上,微球上升高度与脉冲能量成线性关系。超过清洗阈值,微粒起抛高度与激光脉冲能量成线性上升,因此可以精确控制微球的速度和上升位置。同时,微粒直径不可过小,当微粒直径小于1微米时,随着微球尺寸的减小,起抛效率越来越低直至完全无法使微球脱离基面。杂质微粒直径与小球悬浮领域所用直径基本相同,因此可以应用于光学悬浮领域的微粒起振。
发明内容
为了解决背景技术中存在的问题,本发明提供了一种基于脉冲激光重复捕获微球的系统与方法,可实现快速、可重复、高精度、参数不变的微粒悬浮。
本发明采用脉冲激光使微球脱离微腔表面,进入光阱捕获区域,实现微球的起支。当微球脱离光阱后,可通过脉冲激光再次实现微球的起支,从而达到重复捕获的目的。
本发明所采用的技术方案如下:
一、一种基于脉冲激光重复捕获微球的系统:
包括左第一光纤、左第二光纤、左光耦合器、左熔接光纤、毛细管、微球、右熔接光纤、右光耦合器、右第一光纤与右第二光纤;左第一光纤与左第二光纤分别连接于左光耦合器输入侧的两端,左光耦合器输出侧的一端经左熔接光纤的一端连接,左熔接光纤另一端与毛细管一端熔接,微球位于毛细管内部,毛细管另一端与右熔接光纤的一端熔接,右熔接光纤另一端与右光耦合器输出侧的一端连接,右光耦合器输入侧的两端分别与右第一光纤、右第二光纤连接。
所述的毛细管采用二氧化硅毛细管,孔径尺寸大于微球直径。孔径尺寸偏大则约束微球范围困难,偏小则装配难度加大,一般若微球大小为10微米,取孔径尺寸为20至30微米。
所述的左熔接光纤、毛细管与右熔接光纤熔接拼接形成封闭的微腔结构。
所述的毛细管内表面完全干净,可以是真空或者充满气体、充满液体环境。
二、一种基于脉冲激光重复捕获微球的方法,包括如下步骤:
步骤1、左连续激光经过左第一光纤输入至左光耦合器,左光耦合器将左连续激光耦合入左熔接光纤发射至毛细管内部;同时,右连续激光经过右第一光纤输入至右光耦合器,右光耦合器将右连续激光耦合入右熔接光纤发射至毛细管内部;左连续激光与右连续激光同时对向发射至毛细管内部形成光阱捕获区域;
步骤2、左脉冲激光经过左第一光纤输入至左光耦合器,左光耦合器将左脉冲激光耦合入左熔接光纤发射至毛细管内部并照射到微球上,使得左脉冲激光作用于微球上;同时,右脉冲激光经过右第一光纤输入至右光耦合器,右光耦合器将右脉冲激光耦合入右熔接光纤发射至毛细管内部并照射到微球上,使得右脉冲激光作用于微球上;调节右脉冲激光的功率,使得左脉冲激光与右脉冲激光同时作用于微球,微球弹起脱离原位置移动到光阱捕获区域内部,进而实现微球稳定捕获;
步骤3、微球脱离光阱捕获区域内部后,重复上述步骤,在不更换微球的情况下实现微球重复捕获。
本发明以毛细管的内腔作为微腔结构,利用微腔结构作为微球的存储载体,限制微粒的运动范围。
本发明采用光纤耦合推动微球的脉冲激光,通过对双向脉冲激光的光斑大小、脉冲能量、脉冲时间的分别控制,实现微球位置与运动方向、脱离腔体高度的精确控制,使得微球移动进入光阱捕获区域,实现捕获。
本发明具体采用光纤耦合捕获微球的连续激光,通过对向发射的连续激光产生光阱捕获区域,实现微腔结构内微粒的悬浮。若微球脱离光阱捕获区域后,可再次通过调整对向脉冲激光控制微球进入光阱捕获区域,从而实现微球单球的重复捕获。
本发明和传统的微球光悬浮的方法相比,本发明的优势体现在几个方面:
本发明利用封闭的微腔结构,限制微球数量,可针对微球进行精确控制,实现同一微粒的精确重复捕获。微粒的位置与脱离毛细管壁的速度与位置可通过双向激光脉冲分别进行精确控制。
光悬浮成功率高可达百分百,同时封闭的微腔结构适合于真空环境,在完全不污染真空环境,不更换微粒情况下,可实现短时间内微粒精确重复悬浮。
附图说明
图1为本发明系统的结构示意图;
图2左连续激光(S11)与右连续激光(S13)同时对向入射时,形成光阱捕获区域(S12)。
图3为左脉冲激光(S14)入射时,微球(S9)从A位置运动到B位置示意图。
图4为左脉冲激光(S15)入射时,微球(S9)从D位置运动到E位置示意图。
图5为微球(S9)进入光阱捕获区域(S12)后实现稳定悬浮的结构示意图。
图中:左第一光纤S1、左光耦合器S2、左熔接光纤S3、毛细管S4、右熔接光纤S5、右光耦合器S6、右第一光纤S7、右第二光纤S8、微球S9、左第二光纤S10、左连续激光S11、光阱捕获区域S12、右连续激光S13、左脉冲激光S14、右脉冲激光S15。
具体实施方式
以下结合附图进一步说明本发明。
本系统包括存储一个或多个微球的毛细管微腔,微腔两端与两段光纤熔接形成封闭环境。两段光纤一端熔接毛细管,另一端耦合两路激光,其中一路为连续激光,另一路为脉冲激光。对向传输的两束连续激光在毛细管微腔内部形成光阱。两束脉冲光则用于激发微球实现起支。
如图1所示,具体实施包括左第一光纤S1、左第二光纤S10、左光耦合器S2、左熔接光纤S3、毛细管S4、微球S9、右熔接光纤S5、右光耦合器S6、右第一光纤S7与右第二光纤S8;左第一光纤S1与左第二光纤S10分别连接于左光耦合器S2输入侧的两端,左光耦合器S2输出侧的一端经左熔接光纤S3的一端连接,左熔接光纤S3另一端与毛细管S4一端熔接,微球S9位于毛细管S4内部,毛细管S4另一端与右熔接光纤S5的一端熔接,右熔接光纤S5另一端与右光耦合器S6输出侧的一端连接,右光耦合器S6输入侧的两端分别与右第一光纤S7、右第二光纤S8连接。
左熔接光纤S3、毛细管S4与右熔接光纤S5熔接拼接形成封闭的微腔结构,没有间隙,微球S9置于毛细管S4内部。
具体实施的毛细管S4采用二氧化硅毛细管,需大于微球直径,孔径尺寸偏大则约束微球范围困难,偏小则装配难度加大,一般若微球大小为10微米,取孔径尺寸为20至30微米。微球直径为10-20微米。
毛细管S4选用硅材料,能对脉冲光的吸收率和热膨胀系数影响较大,毛细管S4内表面完全干净,可以是真空或者充满气体、充满液体环境,没有除目标微球S9以外的杂质。
本发明具体实施在已知微球S9初始位置的情况下,重复捕获微球的过程如下:
步骤1、左连续激光S11经过左第一光纤S1输入至左光耦合器S2,左光耦合器S2将左连续激光S11耦合入左熔接光纤S3发射至毛细管S4内部;同时,右连续激光S13经过右第一光纤S7输入至右光耦合器S6,右光耦合器S6将右连续激光S13耦合入右熔接光纤S5发射至毛细管S4内部;左连续激光S11与右连续激光S13同时对向发射至毛细管S4内部形成光阱捕获区域S12。
步骤2、左脉冲激光S14经过左第一光纤S1输入至左光耦合器S2,左光耦合器S2将左脉冲激光S14耦合入左熔接光纤S3发射至毛细管S4内部并照射到微球S9上,使得左脉冲激光S14作用于微球S9上;同时,右脉冲激光S15经过右第一光纤S8输入至右光耦合器S6,右光耦合器S6将右脉冲激光S15耦合入右熔接光纤S5发射至毛细管S4内部并照射到微球S9上,使得右脉冲激光S15作用于微球S9上;调节右脉冲激光S15的功率,使得左脉冲激光S14与右脉冲激光S15同时作用于微球S9,微球S9弹起脱离原位置移动到光阱捕获区域S12内部,进而实现微球S9稳定捕获。
步骤3、微球S9脱离光阱捕获区域S12内部后,重复上述步骤,在不更换微球S9的情况下实现微球S9重复捕获。
本发明具体实施在未知微球S9初始位置的情况下,重复捕获微球的过程如下:
步骤1、如图2所示,左连续激光S11经过左第一光纤S1输入至左光耦合器S2,左光耦合器S2将左连续激光S11耦合入左熔接光纤S3发射至毛细管S4内部;同时,右连续激光S13经过右第一光纤S7输入至右光耦合器S6,右光耦合器S6将右连续激光S13耦合入右熔接光纤S5发射至毛细管S4内部。左连续激光S11与右连续激光S13同时对向发射至毛细管S4内部,形成光阱捕获区域S12。
步骤2、如图3所示,左脉冲激光S14经过左第一光纤S1输入至左光耦合器S2,左光耦合器S2将左脉冲激光S14耦合入左熔接光纤S3发射至毛细管S4内部。
若微球S9初始在A位置,即位于毛细管S4内部的底部径向靠近左光耦合器S2的位置。在左脉冲激光S14入射后作用于微球S9上,使得微球S9脱离毛细管S4内壁由A位置向远离左光耦合器S2方向且向上发射至B位置。到B位置后,由于左脉冲激光S14没有持续作用,使得微球S9自然下落到D位置,即位于毛细管S4内部的底部径向靠近右光耦合器S6的位置。
步骤3、如图4所示,右脉冲激光S15经过右第一光纤S8输入至右光耦合器S6,右光耦合器S6将右脉冲激光S15耦合入右熔接光纤S5发射至毛细管S4内部。在右脉冲激光S15入射后作用于微球S9上,使得微球S9脱离毛细管S4内壁由D位置向远离左光耦合器S2方向且向上发射至E位置更靠近。
步骤4、如图5所示,重复步骤2与步骤3,分别开启左脉冲激光S14与右脉冲激光S15,并调节功率大小,将微球S9发射至光阱捕获区域S12内部,实现微球S9稳定捕获。
步骤5、微球S9脱离光阱捕获区域S12内部后,重复步骤1、步骤2、步骤3与步骤4,在不更换微球S9的情况下,实现微球S9重复捕获。
由上述实施可见,本发明的优势能利用微腔实现微粒的重复捕获,无需重复加载微粒,可应用于空气、真空等环境。
上述具体实施方式用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
一种基于脉冲激光重复捕获微球的系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0