

IPC分类号 : H02K9/19,G05D23/19,H02K11/25,H02K41/03,H02P25/064,B23Q15/00,B23Q11/12,H02P6/04





专利摘要
本实用新型为一种自动循环散热式直线电机运动控制平台,包括上位机、下位机控制器、自动循环散热装置,下位机控制器包括温度控制板卡,上位机与下位机控制器通过RS232串口线通讯;温度控制板卡通过串行外设接口给自动循环散热装置中的电动调节阀控制信号;在永磁同步直线电机的电机动子温度发热最明显的区域安装电机温度传感器;自动循环散热装置包括冷却板,在电机动子的线圈绕组上侧表贴式组装冷却板,在冷却板上铺设有冷却管,冷却液入口上通过电动调节阀连接外部冷却液供给回路,在电动调节阀的阀杆上设置阀门位置传感器;电机温度传感器、电动调节阀均与温度控制卡相连。该平台克服了电机不同运动状态下的发热问题,提高了其运动精度。
权利要求
1.一种自动循环散热式直线电机运动控制平台,包括上位机、下位机控制器、永磁同步直线电机驱动的运动平台机械部件;其特征在于,该控制平台还包括自动循环散热装置,下位机控制器包括运动控制板卡和温度控制板卡,上位机与下位机控制器通过RS232串口线通讯;运动控制板卡通过数字伺服驱动器驱动永磁同步直线电机驱动的运动平台机械部件运动;温度控制板卡通过串行外设接口给自动循环散热装置中的电动调节阀控制信号;
所述永磁同步直线电机的电机动子为线圈绕组,电机定子为永磁体,在永磁同步直线电机的电机动子温度发热最明显的区域安装电机温度传感器;
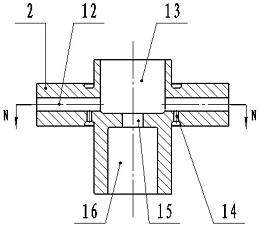
所述自动循环散热装置包括冷却板,在电机动子的线圈绕组上侧表贴式组装冷却板,在冷却板上铺设有双入双出的双层蛇形冷却管,两层冷却管的冷却液出入口相反,冷却液入口上通过电动调节阀连接外部冷却液供给回路循环至冷却液出口,
在电动调节阀的阀杆上设置阀门位置传感器,阀门位置传感器跟随阀杆运动;电机温度传感器、电动调节阀、阀门位置传感器均与温度控制卡相连。
2.根据权利要求1所述的运动控制平台,其特征在于,所述运动控制板卡为HTBK-200MC06控制板卡,其中运动控制板卡的控制核心由CortexM3处理器和FPGA芯片构成;CortexM3处理器设有串行外围设备SPI接口、CAN接口、RS232接口;RS232接口通过RS232串口线与上位机通信,CAN接口为备用总线接口;CortexM3处理器通过FSMC接口与FPGA芯片连接。
3.根据权利要求1所述的运动控制平台,其特征在于,阀门位置传感器采用RotaryencoderK38系列增量式光电编码器,电动调节阀为KTJ5101D电子式电动调节阀,电机温度传感器为DS18B20温度传感器。
说明书
技术领域
本实用新型属于运动平台及控制领域,具体是一种自动循环散热式直线电机运动控制平台。
背景技术
当前制造业的发展过程中,对具有复杂轮廓的高性能零件需求越来越大,对数控机床性能及进给运动平台的控制精度要求不断提高,不仅要求运动平台在高速度场合下的控制精度,还对其在高速频繁启停操作所带来的高加速度场合下的稳定性提出了更高的技术要求。
直线电机驱动的运动平台与传统的滚珠丝杠+旋转伺服电机驱动的传动方式相比,不包含中间传动环节,直接由电能产生电磁推力推动电机的动子做直线进给运动,在速度、精度等方面有明显的优势。
申请号201810842430.6公开了一种直线运动平台,包括:基座;第一运动座与基座导向配合,且第一运动座能够相对基座沿第一轴线方向往复运动;且该直线运动平台还包括第一散热装置和第二散热装置分别用于对两个直线电机进行散热。该专利在机械结构设计时,第二驱动机构运动行程受限于滑轨的长度,且运行过程中电机发热采用集中冷却方式,散热效率不高,直线运动平台在不同工况下不均匀发热会造成滑轨热变形。
实用新型内容
针对现有技术的不足,本实用新型拟解决的技术问题是,提供一种自动循环散热式直线电机运动控制平台。
本实用新型解决所述技术问题采用的技术方案是,提供一种自动循环散热式直线电机运动控制平台,包括上位机、下位机控制器、永磁同步直线电机驱动的运动平台机械部件;特征在于,该控制平台还包括自动循环散热装置,下位机控制器包括运动控制板卡和温度控制板卡,上位机与下位机控制器通过RS232串口线通讯;运动控制板卡通过数字伺服驱动器驱动永磁同步直线电机驱动的运动平台机械部件运动;温度控制板卡通过串行外设接口给自动循环散热装置中的电动调节阀控制信号;
所述永磁同步直线电机的电机动子为线圈绕组,电机定子为永磁体,在永磁同步直线电机的电机动子温度发热最明显的区域安装电机温度传感器;
所述自动循环散热装置包括冷却板,在电机动子的线圈绕组上侧表贴式组装冷却板,在冷却板上铺设有双入双出的双层蛇形冷却管,两层冷却管的冷却液出入口相反,冷却液入口上通过电动调节阀连接外部冷却液供给回路循环至冷却液出口,
在电动调节阀的阀杆上设置阀门位置传感器,阀门位置传感器跟随阀杆运动;电机温度传感器、电动调节阀、阀门位置传感器均与温度控制卡相连。
所述运动控制板卡为HTBK-200MC06控制板卡,其中运动控制板卡的控制核心由CortexM3高性能处理器和FPGA芯片构成;CortexM3高性能处理器设有串行外围设备SPI接口、CAN接口、RS232接口;RS232接口通过RS232串口线与上位机通信,CAN接口为备用总线接口,若无以太网控制进行一般总线控制;
CortexM3高性能处理器通过FSMC接口与FPGA芯片连接;FPGA芯片包括:
脉冲输出模块,负责控制脉冲的输出,使用脉冲加方向方式控制永磁同步直线电机且为AM26LS31差分输出;
编码器输入模块,负责接收XY轴增量式编码器信号,将信号滤波、细分、四倍频后集成至FPGA内进行处理;
模拟量输出电路,利用该模拟量控制相应的轴的运动;
限位开关,为运动控制卡两轴设计四通道限位开关,便于控制卡限制机械运动的位置或行程,该接口具有光耦隔离电路;
通用I/O口模块。
与现有技术相比,本实用新型有益效果在于:
1、本实用新型相对普通运动控制平台,新增设计出一种自动循环散热式直线电机运动控制平台及控制方法,下位机控制器的输出作为两轴运动平台机械部分的输入,此时控制平台的控制信号既有运动控制信号又有温度控制信号,同时直线电机运动控制平台机械部分输出的反馈信号也作为下位机控制器的输入,此时直线电机运动控制平台机械部分的输出不仅有直线电机位置信号,又有阀门开度信号,温度信号等,达到了运动平台机械部分与下位机控制器(电气控制环节)之间良好匹配,解决了永磁同步直线电机不同运动状态下的发热问题,提高了运动控制平台的精度。
2、本实用新型根据运动平台工作环境,采取自动循环散热方式,对电机定子上部添加表贴式冷却板,增加对流散热,直接冷却线圈温度。改进了普通冷却板管道,冷却管材料由铜铝型材复合而成,铜铝型材复合相对铝合金具有更好的导热率,冷却采用水冷方式,增加为两个管道相对循环水冷,相比一个管道冷却温度更加均匀。自动循环散热装置的应用,大大提高了散热效率,且冷却液的自动循环使用,节约了成本,减少了资源浪费。
附图说明
图1为本实用新型自动循环散热式直线电机运动控制平台整体框架图;
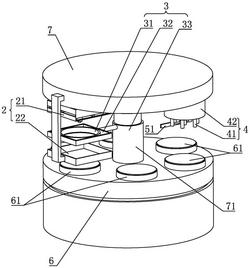
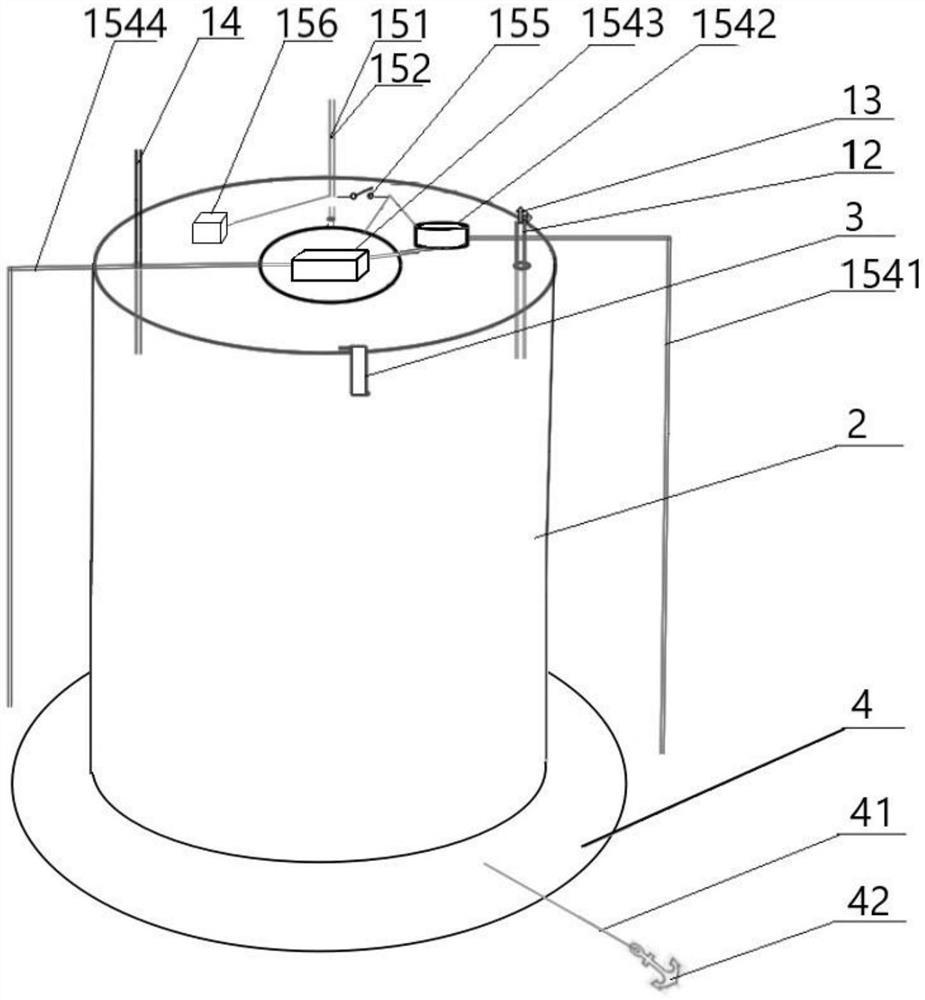
图2为本实用新型直线电机循环冷却系统外部示意图;
图3为本实用新型数字伺服驱动器的框架图;
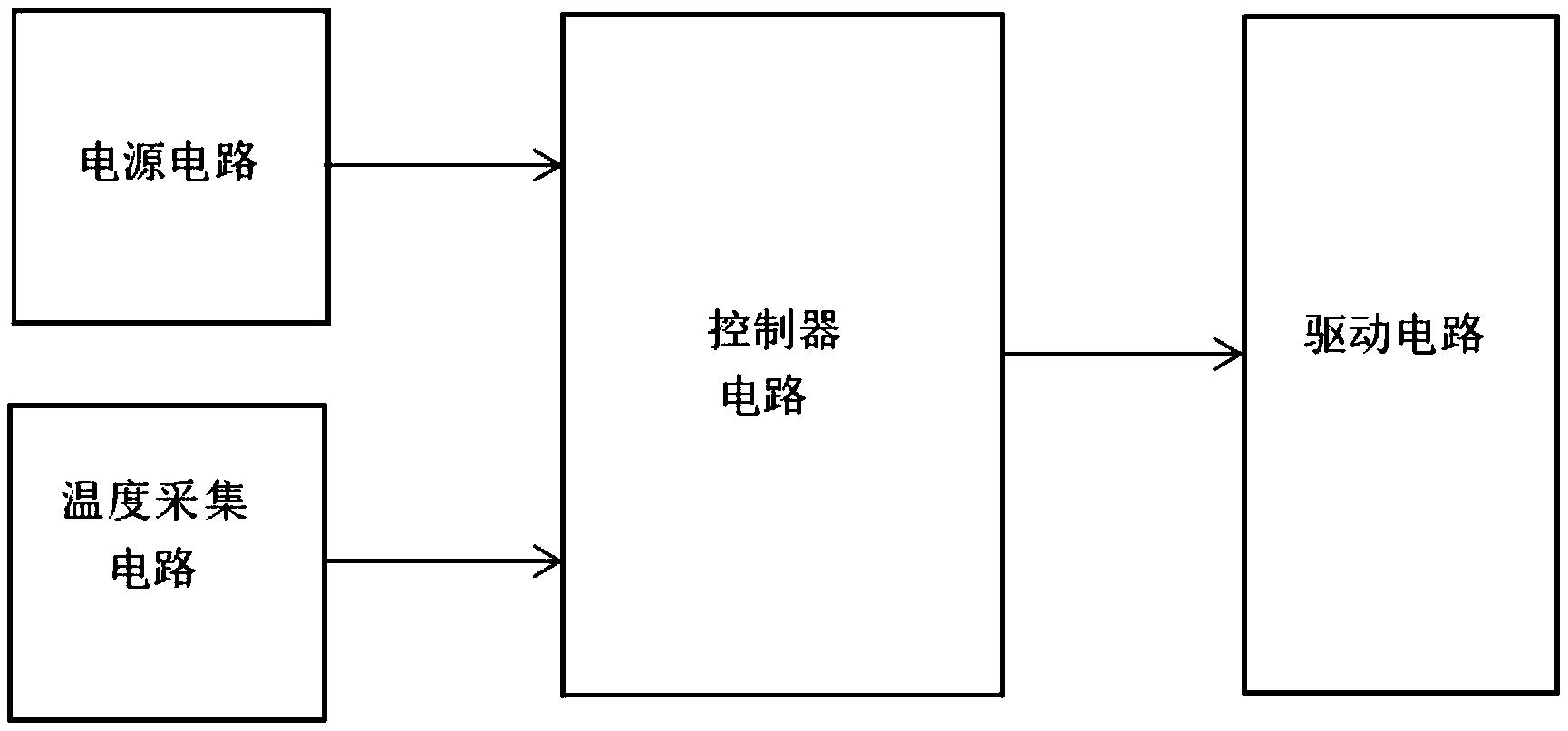
图4为本实用新型温度分级控制方法基本框图;
图5为本实用新型有差值裕度的分级控制阀门开度变化示意图;
图6为本实用新型直线电机驱动器内部PID控制框图;
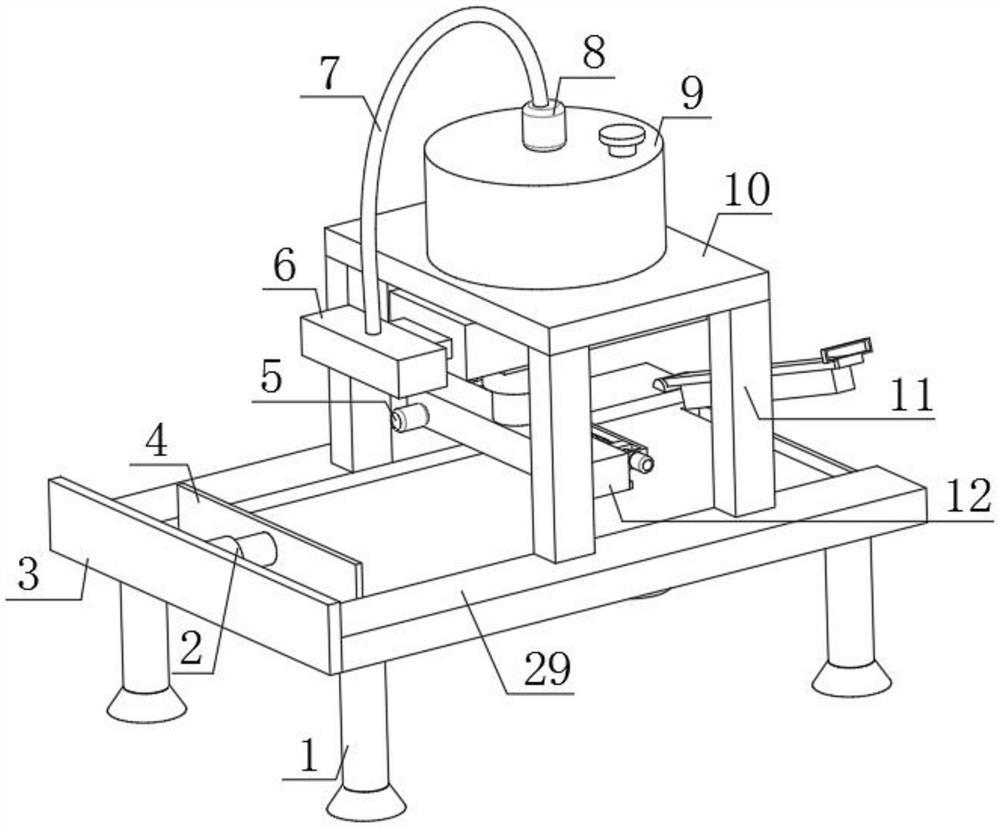
图7为本实用新型直线电机驱动的两轴运动平台的结构图;
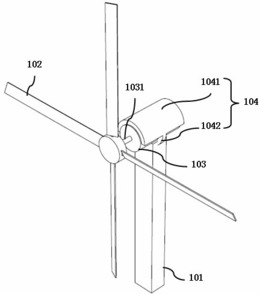
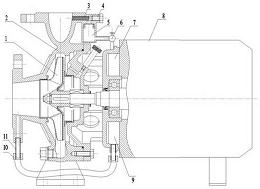
图8为本实用新型直线电机驱动的单轴结构图;
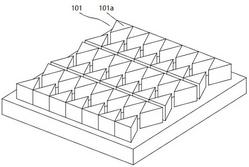
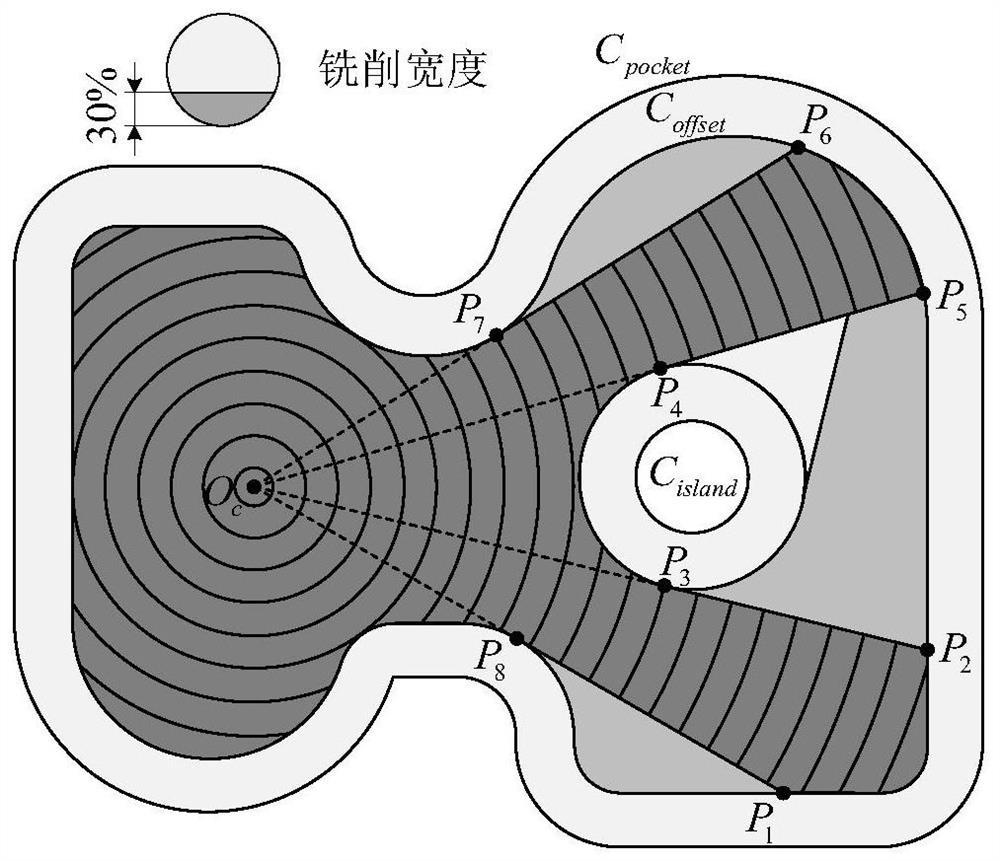
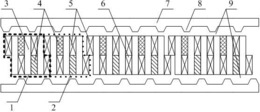
图9为本实用新型直线电机冷却板管道分布图;
图中:
1、上位机;2、自动循环散热式运动控制器;3、电源;4、RS232串口线;5、X轴永磁同步直线电机;6、Y轴永磁同步直线电机;7、键盘;8、显示器;
21、运动控制板卡;22、数字伺服驱动器;23、温度控制板卡;
24、电机温度传感器;25、电动调节阀;26、阀门位置传感器;
211、CorexM3高性能处理器;212、FPGA芯片;
2111、SPI接口;2112、CAN接口;2113、RS232接口;
2121、脉冲输出模块;2122、编码器接收模块;2123、模拟量输出电路;
2124、限位开关;2125、通用I/O口模块;
221、电源;222、控制器;223、故障保护模块;224、PWM模块;225,电流反馈模块;226、功率驱动模块;
231、MCS-51系列单片机;232、采样电路;233、A/D转换模块;234、D/A转换模块;235、模拟量输出电路;236、位置反馈模块;
9、两轴运动平台;91、X轴进给系统;92、Y轴进给系统;911、X轴转接台;
931、电机定子;932、电机动子;933、标准支撑铝板;934、滑块;935、方导轨;936、光栅尺;937、光栅尺读数表头;938、限位感应器;939、底座;9310、冷却板;
具体实施方式
下面给出本实用新型的具体实施例。具体实施例仅用于进一步详细说明本实用新型,不限制本申请的保护范围。
本实用新型一种自动循环散热式直线电机运动控制平台,整个平台由上位机(PC机)1、下位机控制器即自动循环散热式运动控制器2、电源3、RS232串口线4、X轴永磁同步直线电机5、Y轴永磁同步直线电机6、键盘7、显示器8组成。
所述上位机1负责将输入的人机交互强的指令处理成符合通信协议命令帧的格式,通过串口4发送到下位机。上位机软件是集运动控制与温度控制于一体的应用软件,用户可以通过上位机软件经标准RS232接口与下位机进行通讯,以实现进行实时监测与在线控制。
所述下位机控制器即自动循环散热式运动控制器2,下位机控制器包括控制永磁同步直线电机驱动的运动平台机械部件动作的运动控制板卡和控制自动循环散热装置的温度控制板卡,上位机与下位机控制器通过RS232串口线通讯;运动控制板卡通过数字伺服驱动器驱动永磁同步直线电机驱动的运动平台机械部件运动;温度控制板卡通过串行外设接口(SPI)驱动自动循环散热装置中的电动调节阀运动。主要负责接收上位机传来的命令,根据指令内容完成对永磁同步直线电机5的控制,采集温度传感器信号实现对电机的自动循环散热控制。同时,自动循环散热式运动控制器2可以通过自身扩展的键盘7和显示器8,直接显示电机温度,电机位置,实现脱机运动控制。
所述运动控制板卡21可为HTBK-200MC06控制板卡,其中运动控制板卡21的控制核心由CortexM3高性能处理器211和FPGA芯片212构成。CortexM3高性能处理器211设有串行外围设备SPI接口2111,CAN接口2112,RS232接口2113。RS232接口2113通过RS232串口线4与上位机通信,CAN接口2112属于备用总线接口,若无以太网控制可进行一般总线控制。
CortexM3高性能处理器211通过FSMC接口213与FPGA芯片212连接。FPGA芯片212负责运动插补、接收编码器反馈、控制开关量等功能。根据功能划分,FPGA外围的模块有脉冲输出模块2121,负责控制脉冲的输出,使用脉冲加方向方式控制永磁同步直线电机且为AM26LS31差分输出;编码器输入模块2122,负责接收XY轴增量式编码器信号,将信号滤波、细分、四倍频后集成至FPGA内进行处理,相比普通编码器模块集成度高,使得功耗降低,抗干扰能力强;模拟量输出电路2123,为了增加控制板卡的模拟量控制性能,在FPGA外围设计了±10V的模拟量输出电路,可以利用该模拟量控制相应的轴的运动;限位开关2124,为运动控制卡两轴设计了四通道限位开关,便于控制卡限制机械运动的位置或行程,该接口具有光耦隔离电路;通用I/O口模块2125,为提高硬件的可扩展性。
所述数字伺服驱动器22如图3所示,数字伺服驱动器可选型为Solo Whistle驱动器,由电源221、控制器222、故障保护模块223、PWM模块224、电流反馈模块225、功率驱动模块226组成。故障保护模块223主要防止电机功率输出之间短路,电源故障,过温,过/欠电压,失去反馈,跟随错误,提供限流保护等功能。PWM模块,简称脉宽调制模块主要利用控制器222的数字输出来对模拟电路进行控制的一种非常有效的技术,PWM的优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换,让信号保持为数字形式可将噪声影响降到最小。电流反馈模块225大致由霍尔元件、运算放大器和A/D转换器组成。功率驱动模块226主要驱动永磁同步直线电机,每个永磁同步直线电机都有一个驱动器驱动。
所述温度控制板卡23包括单片机、采样电路、位置反馈模块、A/D转换模块、D/A转换模块、模拟量输出电路。温度控制板卡选用MCS-51系列单片机231作为控制核心,电机温度传感器24选用DS18B20温度传感器,该温度传感器可把温度信号直接转换成串行数字信号供单片机处理。这些实际数据通过传感器内部的A/D模块转变为数字信号后,传输给单片机,单片机将其与系统给定的输入数据进行比较,二者的差值送给PID控制器进行算法处理产生控制信号,采样电路232接收控制电流信号输入,经过处理后转化成0~100%的开度设定值,利用高端电流检测法在采样电路中对电流信号进行转化,将处理后的电流信号转化为模拟电压信号。A/D转换模块233可将模拟信号转换成数字信号。D/A转换模块234可将数字信号转换为模拟信号。模拟量输出电路235连接到电动调节阀,电动调节阀235选型为KTJ5101D电子式电动调节阀,该类调节阀流量系数大,可调比较大。当输出不同程度的电流或者脉冲信号时,电动调节阀会根椐接收来的信号,通过电动调节阀内部的电机正反转驱使阀芯阀杆产生相对位移,来控制阀门的开度,以达到模拟控制的目的。阀门位置传感器26连接在电动调节阀25的阀杆上跟随阀杆运动,改变位移反馈值。阀门位置传感器26采用Rotary encoder K38系列增量式光电编码器,相对于电磁式传感器没有磁滞特性,反馈精度高。位移反馈模块236对阀门位置传感器26反馈的阀门开度值进行处理,并与输入设定值展开对比,形成反馈。具体数据反馈的硬件电路为现有技术,可参见下述文献(潘宇轩,董全林,张玉莲,张春熹.基于SPI驱动的智能调节阀控制系统研究[J].现代电子技术,2018,41(10):1-4.)
本实用新型中关于温度控制卡中的温度控制方法可以直接采用现有控制方法实现,控制方法部分不属于本申请的保护内容,以下给出一个可行的方式。
首先由电机温度传感器测得当前电机温度反馈值,并加工反馈值与给定温度设定值相比较,得到温度偏差e。如图4所示,当温度设定值与反馈值差值小于ek时(ek为温度分级控制阈值,该值可针对不同永磁同步直线电机温升以及具体工况条件灵活调整),此时根据永磁同步直线电机温升以及行业标准暂定ek=10℃,采用增益可调节的PID控制,即对PID控制分级,每一级采取不同的PID控制增益参数,以解决控制精度与动态性能之间的矛盾,减少振荡。当温度设定值与反馈值差值大于ek时,采用有差值裕度的分级控制,因为每一级的温度都有一温度差值裕度,当电机温度在某一值附近来回波动时,不会导致电动调节阀阀门开度频繁切换。
增益可调节的PID控制:增益可调节的PID控制如图6所示,根据永磁同步直线电机温升控制状态,把0℃~ek温度偏差范围划分成三个区间,依次为区间Ⅰ、区间Ⅱ和区间Ⅲ,不同区间取不同的比例参数和积分参数,如表1。区间Ⅰ与区间Ⅱ的分界值为ea,区间Ⅱ与区间Ⅲ的分界值为eb,其中区间Ⅰ与区间Ⅱ的分界值ea和区间Ⅱ与区间Ⅲ的分界值eb的大小可根据不同永磁同步直线电机温升状态可灵活调整,当温度偏差e大于区间Ⅰ与区间Ⅱ的分界值ea时,温升状态远离静态平衡,此时只需要考虑瞬态响应的快速性。故而偏差ea<e<ek时,温度控制板卡23控制积分开关闭合,取消积分项的作用,仅比例项起作用以提高系统的响应速度,加快响应过程。当温度偏差e小于区间Ⅱ与区间Ⅲ的分界值eb时,表示温升状态在一定程度上已经接近静态平衡位置,正向平衡位置快速靠近,并有可能引起超调。这时,瞬态响应的快速性应该得到适当控制,瞬态响应的平稳性与稳态响应的准确性、稳定性逐步成为主要矛盾。故而当偏差e<eb时,比例和积分同时起作用,但此时积分作用占主导,以提高系统的阻尼性能,减小响应过程中的超调。当偏差eb<e<ea时,瞬态响应和稳态响应变化的非敏感区域,切换转入PI控制,此时比例和积分同时起作用。其中Kp1、Kp2、Kp3、Ki1、Ki2可通过参数自整定得到。这里ea为5,eb为3。
表1是本实用新型增益可调节的PID控制分级控制表
有差值裕度的分级控制:有差值裕度的分级控制阀门开度变化如图5所示,温度差值每变化10℃阀门开度值随其变化20%,温度稳定裕度为Δe,一个分级的偏差最大值与该分级的偏差最小值分别用et、eq表示et-eq=Δe,则温度差值每变化Δe阀门开度值随其变化特定值,且当温度处于相邻两级变化临界点附近波动时,阀门开度不会随之波动。实例中差值裕度Δe取10℃,则et=eq+10℃,et=10℃、20℃、…、40℃,所以阀门开度不会随之波动。例如,et=20℃,当温度差值e位于et=20℃临界值附近时,若温度差值e继续增大,温度差值超过et=20℃时,电动调节阀内部电机正向旋转,阀门开度增大。当温度差值e下降,温度差值e低于et=20℃,电动调节阀内部电机电机不会发生变化,只有温度差值e低于eq=10℃时,电动调节阀内部电机电机才会反向旋转,阀门开度减小。
运动控制板卡21采用脉冲外加方向的控制方式控制数字伺服驱动器22,输入脉冲的个数决定了位移量,脉冲的频率决定了位移速度。运动控制板卡21和数字伺服驱动器22之间可传递实时数据交互。运动控制卡可以传递位置、速度或者电流信号到数字伺服驱动器22,数字伺服驱动器22可传递实时的编码器位置、实际速度或者实际电流信号到运动控制卡,也可以在两者之间传递配置参数、状态信息等非周期性数据。
数字伺服驱动器22采用电流环、速度环、位置环全闭环PID控制驱动永磁同步直线电机(具体控制过程采用现有技术实现),如图6所示,在三环PID控制结构中电流环用来改变被控对象的传递函数,用以提高系统快速性并抑制电流波动,电流环采用PI控制;速度环用以抑制负载变化以及干扰力对控制系统的影响,降低工作台速度的波动,保障平稳运行,速度环通常采用PI控制器;位置环用来消除位移的静态误差并降低动态跟随误差,常采用P控制器。由于反馈信号中常含有交流高频干扰信号,易使系统不稳定,故而外加速度环前项滤波器和电流环前项滤波器,减少扰动干扰。
本实用新型的一个实施例公开了一种两轴运动平台9,如图7所示,具体的永磁同步直线电机驱动的运动平台机械部件包括:X轴进给系统91、Y轴进给系统92及相应的进给系统驱动机构93。X轴转接台911能够相对平台沿X轴方向往复运动;Y轴进给系统92设置于X轴转接台911上方,Y轴进给系统92与X轴进给系统91导向配合,且Y轴进给系统92能够相对X轴进给系统91沿Y轴方向往复运动,Y轴运动方向与X轴运动方向垂直设置。永磁同步直线电机选择无铁芯直线电机,具有更高的加速度及减速度。
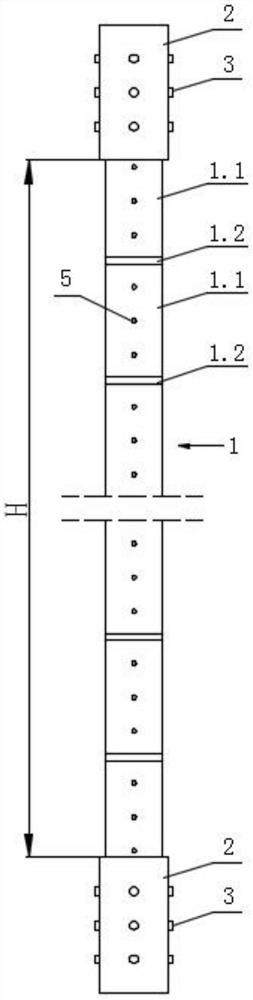
XY轴进给系统组成结构相同,如图8所示,进给系统驱动机构93由电机定子931,电机动子932,标准支撑铝板933,滑块934,方导轨935,光栅尺936,光栅尺读数表头937,限位感应器938,底座939,电机动子931,电机定子932等零件组成。直线电机的结构可以看作是将一台旋转交流永磁同步电机沿径向剖开后平铺,并将电机的磁场沿圆周展开形成的,旋转电机静子相当于直线电机的定子,旋转电机转子相当于直线电机动子,当电机动子通入三相交流电后,在直线电机动子与静子之间的气隙中产生行波磁场,在行波磁场与静子永磁体阵列的作用下产生电磁推力推动电机动子,实现电机动子部件的直线运动。电机动子932为线圈绕组,电机定子931设置为永磁体。
电机动子931通过标准支撑铝板933与转接台911连接,且电机动子931能够在磁场作用下通过滑块934和方导轨935导向配合,沿轴线方向往复运动。
XY轴进给系统还包括光栅尺936和光栅尺读数表头937,光栅尺936设置于底座上,光栅尺读数表头937固定在转接台911旁并随之运动,且光栅尺936和光栅尺读数表头937处于非接触式的工作状态,用于对进给系统在轴线方向上的线性位移进行检测,并将模拟测量值转换为增量输出信号,输出运动控制器,形成的闭环控制,提高了控制精度与定位精度。XY轴进给系统还包括限位感应器938与限位开关2124相连接,主要用于控制运动平台行程和进行限位保护。
本实用新型的一个实施例公开了一种自动循环散热装置,所述自动循环散热装置包括冷却板9310、电动调节阀、液压泵、冷却液箱、节流阀、热交换器、电机温度传感器、流量计。液压泵选择泊盛世NCB-0.6摆线齿轮泵,传动平稳,噪声小。冷却液箱选择密封贮液缸,起到液封的作用。节流阀选择卓基牌SL8-04节流阀,连接主管道。热交换器可选择科威翅片式3HP双风口散热器,加快冷却。流量器选用德国液体涡轮流量计DN15A型脉冲输出G型显示加485通讯即可。电机动子932为线圈绕组,电机定子931设置为永磁体。励磁电流通过线圈绕组并在线圈绕组中产生损耗。这些损耗几乎全部转变为热能,使线圈温度升高。温升超过极限,会影响其绝缘性能和机械强度,降低使用寿命,甚至损坏。根据GB/T14048.1-2000《低压开关设备和控制设备总则》可知绕组温升限度为50℃,根据电磁装置的工作环境温度,知装置最高温度不能超过90℃,故而电机动子需要设计冷却装置,根据运动平台工作环境,电机定子冷却采用水冷方式,利用冷却液,增加对流散热,直接强制冷却热源。其中无铁芯永磁同步直线电机更适合于高加速度(10G或更高)和高速的场合应用,但是它有更高的热敏电阻,存在更严重的“热误差效应”,故而更需要散热装置。电机动子绕组采用了无铁心结构,在绕组的上侧增加冷却板9310,进而组成表贴式冷却结构,实现了对绕组的冷却及热屏蔽。冷却管采用较高导热系数的铜铝结合材料,即由铜管和铝型材复合,铝的导热系数为735KJ/(M.H.K),铜的导热系数为1386KJ/(M.H.K),在其他条件均相同的时候铜在单位时间内传导速率是铝的两倍,但是铜重量比铝大会增加负载,故而将铜铝结合应用,走水部分为紫铜管,外侧包裹铝管,可组合对流散热。图9给出冷却板管道分布,同侧两水道口采用一进一出交替分布的原则,有效的控制了表面温升的均匀性。本申请中两个进给系统分别对应一个永磁同步直线电机,每个永磁同步直线电机的电机动子上均设置一个冷却板,两个冷却板上的冷却液入口可以各自通过一个电动调节阀去实现每个进给系统的温度单独控制,一个冷却板上的两个冷却液入口连接同一个电动调节阀,此时两个电动调节阀可以都连接一个温度控制卡,一个温度控制卡采集两个温度偏差数据,分别对两个温度偏差数据,各自按照上述的温度分级控制算法进行温控;或者两个电动调节阀各自连接一个相同的温度控制卡,两个温度控制卡均连接上位机,各自通过温度分级控制算法对各自的进给系统进行单独温控;更或者,两个冷却板上的所有冷却液进口均通过冷却液主管道流入,冷却液主管道上设置一个电动调节阀,冷却液主管道经电动调节阀后形成四个支路,两个支路给X轴进给系统供给冷却液,另两个支路给Y轴进给系统供给冷却液,温度控制板卡23控制电动调节阀的阀门开度,电动调节阀安装在主管道部分,能使两个进给系统的温控达到一致,此时一个温度控制卡控制一个电动调节阀,实现两个进给系统温度的同步控制。
图2为直线电机循环冷却系统外部示意图,其工作原理是当永磁直流电机需要冷却时液压泵开启,将冷却液箱中的冷却液通过节流阀进入电动调节阀,同时温度控制板卡23通过温度分级控制方法控制电动调节阀的阀门开度,使冷却液流量随电机温度传感器温度信号实时调节的进入电机定子的冷却板两个冷却液入口,冷却板内部有冷却结构,冷却液从入口到出口与电机定子发生对流换热过程,冷却液从两个冷却液出口在进入热交换器冷却后返回冷却液箱,以此反复循环冷却电机温度传感器与流量计与显示器直接连接,在温度控制系统工作时可实时监控温度和流量。
本实用新型未述及之处适用于现有技术。
一种自动循环散热式直线电机运动控制平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0