










专利摘要
本发明公开了一种基于压电驱动的柔性机器人,由六个驱动足连接在十字型PVC薄膜上构成,PVC薄膜上下表面分别布置交叉的形状记忆合金弹簧和形状记忆合金丝。利用压电双晶片在正余弦电压作用下的振动,通过激励不同的压电双晶片组,使机器人产生前进、左转、右转的平面运动;利用形状记忆合金弹簧加热收缩回复原长的特性,使机器人相应的前腿、中间腿或后腿抬起,同时利用形状记忆合金丝加热回复直线原形的特性,使机器人相应的前腿、中间腿或后腿落下,实现机器人的越障功能。本发明结合压电驱动的快速响应、精确定位以及形状记忆合金变形度大的优势,实现了机器人的平面运动和越障功能。
权利要求
1.基于压电驱动的柔性机器人,其特征在于,包括PVC薄膜、第一至第六驱动足、第一至第二形状记忆合金弹簧、以及两组形状记忆合金丝;
所述第一、第二形状记忆合金弹簧均设置在所述PVC薄膜上表面,两端均和所述PVC薄膜固连、呈拉伸状态,且第一、第二形状记忆合金弹簧垂直相交;
所述第一形状记忆合金弹簧的两端均设有一组用于加热的导线,所述第二形状记忆合金弹簧的两端各设一根导线、形成一组用于加热的导线,所述第一、第二形状记忆合金弹簧均用于在受热时收缩以带动所述PVC薄膜弯曲;
所述两组形状记忆合金丝均设置在所述PVC薄膜的下表面,分别位于第一、第二形状记忆合金弹簧处的正下方,两端分别接外部电流,用于在通电受热时使得弯曲的PVC薄膜恢复为原状;
所述第一至第六驱动足均采用压电双晶片,一端为振动端、另一端和所述PVC薄膜固连;
所述第一至第六驱动足均接外部驱动信号,用于通过振动产生前驱力;
所述第一、第二驱动足设置在所述第一形状记忆合金弹簧的一端,第三、第四驱动足设置在所述第一形状记忆合金弹簧的另一端;
所述第五、第六驱动足分别设置在所述第二形状记忆合金弹簧的两端;
所述PVC薄膜未弯曲时,所述第一至第四驱动足相互平行、和所述PVC薄膜之间的夹角小于90°,所述第一形状记忆合金弹簧、第一驱动足和第三驱动足所在的平面、第二驱动足和第四驱动足所在的平面相互平行,所述第五、第六驱动足均垂直于所述PVC薄膜,且所述第一至第六驱动足的振动端到所述PVC薄膜的距离相等。
2.根据权利要求1所述的基于压电驱动的柔性机器人,其特征在于,所述两组形状记忆合金丝均包含两根形状记忆合金丝。
3.基于权利要求1所述的基于压电驱动的柔性机器人的控制方法,其特征在于,所述基于压电驱动的柔性机器人直线运动的控制方法如下:
对第一至第四驱动足施加同幅同频的正余弦电压,第五至第六驱动足不施加激励信号。
4.基于权利要求1所述的基于压电驱动的柔性机器人的控制方法,其特征在于,所述基于压电驱动的柔性机器人转弯的控制方法如下:
如果需要柔性机器人向右转弯,对第一驱动足、第四驱动足施加同幅同频的正余弦电压,第二、第三、第五、第六驱动足不施加激励信号;
如果需要柔性机器人向左转弯,对第二驱动足、第三驱动足施加同幅同频的正余弦电压,第一、第四、第五、第六驱动足不施加激励信号。
5.基于权利要求1所述的基于压电驱动的柔性机器人的控制方法,其特征在于,所述基于压电驱动的柔性机器人跨越障碍的控制方法如下:
步骤1),对第一至第四驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第一驱动足和第二驱动足到达障碍前;
步骤2),关闭第一至第四驱动足的激励信号,通过第一形状记忆合金弹簧靠近第三驱动足和第四驱动足一端的一组导线对第一形状记忆合金弹簧进行加热,使靠近第三驱动足和第四驱动足的一端先收缩,带动第二形状记忆合金弹簧移动,导致重心偏移,同时PVC薄膜弯曲,使得第一驱动足、第二驱动足抬起,第五驱动足、第六驱动足向前进方向滑移形成倾角;
步骤3),对第五驱动足、第六驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第五驱动足和第六驱动足到达障碍前;
步骤4),关闭第五驱动足、第六驱动足的激励信号,通过加热PVC薄膜下表面对应于第一形状记忆合金弹簧的那组形状记忆合金丝,使得PVC薄膜由弯曲状回复原状,第一驱动足和第二驱动足落下,此时,第一驱动足、第二驱动足越过障碍;
步骤5),加热第二形状记忆合金弹簧,使其收缩,第五驱动足、第六驱动足抬起;
步骤6),对第一至第四驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第三驱动足和第四驱动足到达障碍前;
步骤7),关闭第一至第四驱动足的激励信号,通过加热PVC薄膜下表面对应于第二形状记忆合金弹簧的那组形状记忆合金丝,使得PVC薄膜由弯曲状回复原状,第五驱动足和第六驱动足落下,此时第五驱动足、第六驱动足越过障碍;
步骤8),通过第一形状记忆合金弹簧靠近第一驱动足和第二驱动足一端的一组导线对第一形状记忆合金弹簧进行加热,使靠近第一驱动足和第二驱动足的一端先收缩,带动第二形状记忆合金弹簧移动,导致重心偏移,同时PVC薄膜弯曲,使得第三驱动足和第四驱动足抬起,同时竖直的第五驱动足、第六驱动足向后滑移形成倾角;
步骤9),对第一至第二驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第三驱动足和第四驱动足越过障碍;
步骤10),关闭第一至第二驱动足的激励信号,通过加热PVC薄膜下表面对应于第一形状记忆合金弹簧的那组形状记忆合金丝,使得PVC薄膜由弯曲状回复原状,第三驱动足和第四驱动足落下。
说明书
技术领域
本发明涉及于超声领域、压电技术领域和柔性机器人领域,尤其涉及一种基于压电驱动的柔性机器人及其控制方法。
背景技术
针对精准医疗、军事侦察、险情排除等特殊应用以及危险、狭窄空间等多变环境对机器人提出的高精细操作的要求,微型移动机器人受益于轻量化、小尺寸和高机动性等优势,在工业检测、微机电组装、微外科手术、生物工程、光学工程和分布式传感器网络等领域有广阔的应用前景。压电驱动器具有质量轻、噪声低、位移精度高、输出力矩大、响应速度快、工作频率宽以及功耗低等优点,成为重要的新型微位移部件。微型压电机器人,通过改变驱动电压、共振频率来控制机器人的运动速度、移动方向,机器人可以完成平面内的直线以及转向运动。
但是由于压电材料在弹性体内激发的是微幅振动,经弹性体放大后,竖直方向的位移很小,不足以越过行进过程中的障碍物,局限于平面内的运动,不具备三维运动或避障功能。柔性机器人由柔性材料加工而成,自身可连续变形,与刚性机器人相比具有更高的柔顺性、安全性和适应性,利用材料的变形特性,将超弹性材料或智能材料通过结构设计,改变材料的变形方向从而产生弯曲甚至复杂的三维运动。虽然柔性机器人自由度高,运动灵活,可根据周围的环境主动或者被动地改变自身的形态,但是柔性材料制成的柔性机器人负载低、刚度差、强度低。
发明内容
本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种基于压电驱动的柔性机器人及其控制方法,将压电驱动技术与柔性机构控制技术相结合,利用压电作动器精密驱动特性,以及柔性机构大变形的优势,实现压电驱动控制下的平面运动,以及柔性机构辅助的越障功能。
本发明为解决上述技术问题采用以下技术方案:
基于压电驱动的柔性机器人,包括PVC薄膜、第一至第六驱动足、第一至第二形状记忆合金弹簧、以及两组形状记忆合金丝;
所述第一、第二形状记忆合金弹簧均设置在所述PVC薄膜上表面,两端均和所述PVC薄膜固连、呈拉伸状态,且第一、第二形状记忆合金弹簧垂直相交;
所述第一形状记忆合金弹簧的两端均设有一组用于加热的导线,所述第二形状记忆合金弹簧的两端各设一根导线、形成一组用于加热的导线,所述第一、第二形状记忆合金弹簧均用于在受热时收缩以带动所述PVC薄膜弯曲;
所述两组形状记忆合金丝均设置在所述PVC薄膜的下表面,分别位于第一、第二形状记忆合金弹簧处的正下方,两端分别接外部电流,用于在通电受热时使得弯曲的PVC薄膜恢复为原状;
所述第一至第六驱动足均采用压电双晶片,一端为振动端、另一端和所述PVC薄膜固连;
所述第一至第六驱动足均接外部驱动信号,用于通过振动产生前驱力;
所述第一、第二驱动足设置在所述第一形状记忆合金弹簧的一端,第三、第四驱动足设置在所述第一形状记忆合金弹簧的另一端;
所述第五、第六驱动足分别设置在所述第二形状记忆合金弹簧的两端;
所述PVC薄膜未弯曲时,所述第一至第四驱动足相互平行、和所述PVC薄膜之间的夹角小于90°,所述第一形状记忆合金弹簧、第一驱动足和第三驱动足所在的平面、第二驱动足和第四驱动足所在的平面相互平行,所述第五、第六驱动足均垂直于所述PVC薄膜,且所述第一至第六驱动足的振动端到所述PVC薄膜的距离相等。
作为本发明一种基于压电驱动的柔性机器人进一步的优化方案,所述两组形状记忆合金丝均包含两根形状记忆合金丝。
本发明还公开了一种基于压电驱动的柔性机器人的控制方法,其中,基于压电驱动的柔性机器人直线运动的控制方法如下:
对第一至第四驱动足施加同幅同频的正余弦电压,第五至第六驱动足不施加激励信号。
本发明还公开了一种基于压电驱动的柔性机器人的控制方法,其中,所述基于压电驱动的柔性机器人转弯的控制方法如下:
如果需要柔性机器人向右转弯,对第一驱动足、第四驱动足施加同幅同频的正余弦电压,第二、第三、第五、第六驱动足不施加激励信号;
如果需要柔性机器人向左转弯,对第二驱动足、第三驱动足施加同幅同频的正余弦电压,第一、第四、第五、第六驱动足不施加激励信号。
本发明还公开了一种基于压电驱动的柔性机器人的控制方法,其中,所述基于压电驱动的柔性机器人跨越障碍的控制方法如下:
步骤1),对第一至第四驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第一驱动足和第二驱动足到达障碍前;
步骤2),关闭第一至第四驱动足的激励信号,通过第一形状记忆合金弹簧靠近第三驱动足和第四驱动足一端的一组导线对第一形状记忆合金弹簧进行加热,使靠近第三驱动足和第四驱动足的一端先收缩,带动第二形状记忆合金弹簧移动,导致重心偏移,同时PVC薄膜弯曲,使得第一驱动足、第二驱动足抬起,第五驱动足、第六驱动足向前进方向滑移形成倾角;
步骤3),对第五驱动足、第六驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第五驱动足和第六驱动足到达障碍前;
步骤4),关闭第五驱动足、第六驱动足的激励信号,通过加热PVC薄膜下表面对应于第一形状记忆合金弹簧的那组形状记忆合金丝,使得PVC薄膜由弯曲状回复原状,第一驱动足和第二驱动足落下,此时,第一驱动足、第二驱动足越过障碍;
步骤5),加热第二形状记忆合金弹簧,使其收缩,第五驱动足、第六驱动足抬起;
步骤6),对第一至第四驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第三驱动足和第四驱动足到达障碍前;
步骤7),关闭第一至第四驱动足的激励信号,通过加热PVC薄膜下表面对应于第二形状记忆合金弹簧的那组形状记忆合金丝,使得PVC薄膜由弯曲状回复原状,第五驱动足和第六驱动足落下,此时第五驱动足、第六驱动足越过障碍;
步骤8),通过第一形状记忆合金弹簧靠近第一驱动足和第二驱动足一端的一组导线对第一形状记忆合金弹簧进行加热,使靠近第一驱动足和第二驱动足的一端先收缩,带动第二形状记忆合金弹簧移动,导致重心偏移,同时PVC薄膜弯曲,第三驱动足和第四驱动足抬起,同时竖直的第五驱动足、第六驱动足向后滑移形成倾角;
步骤9),对第一至第二驱动足施加同幅同频的正余弦电压,使得柔性机器人向前直线运动,直至第三驱动足和第四驱动足越过障碍;
步骤10),关闭第一至第二驱动足的激励信号,通过加热PVC薄膜下表面对应于第一形状记忆合金弹簧的那组形状记忆合金丝,使得PVC薄膜由弯曲状回复原状,第三驱动足和第四驱动足落下。
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
本发明主要由六个驱动足连接在十字型PVC薄膜上构成,PVC薄膜上下表面分别布置交叉的形状记忆合金弹簧和形状记忆合金丝。利用压电双晶片在正余弦电压作用下的振动,通过激励不同的压电双晶片组,使机器人产生前进、左转、右转的平面运动;利用形状记忆合金弹簧加热收缩回复原长的特性,弯曲PVC薄膜,通过重心移动使机器人相应的前腿、中间腿或后腿抬起,同时利用形状记忆合金丝加热回复直线原形的特性,回复PVC平整,使机器人相应的前腿、中间腿或后腿落下,从而实现机器人的越障功能。本机器人结合压电驱动的快速响应、精确定位以及形状记忆合金变形度大的优势,并且避免形状记忆合金弹簧冷却回复而导致的响应慢的问题,实现机器人的平面运动和越障功能。
附图说明
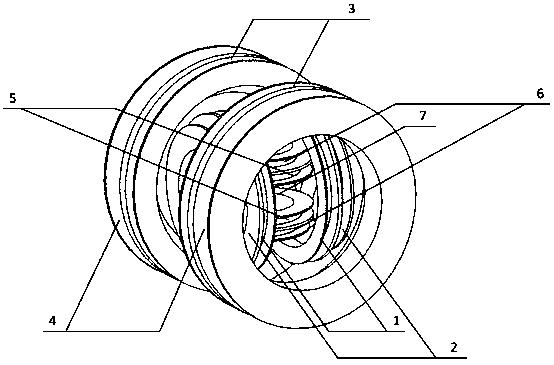
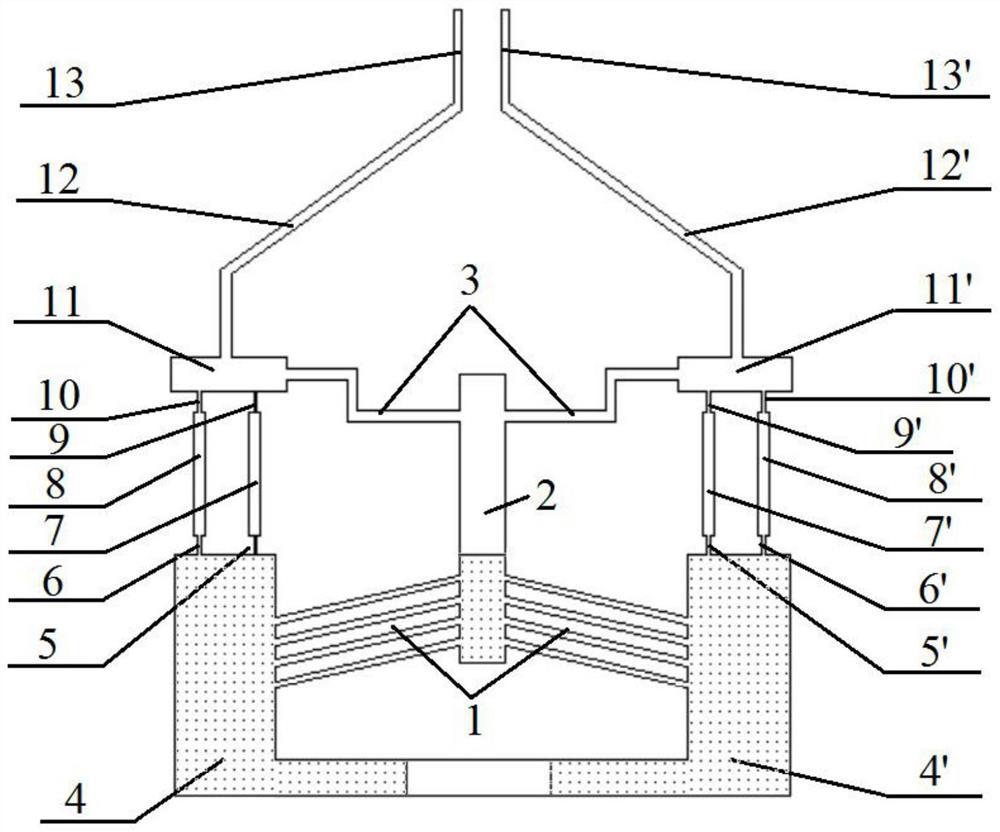
图1是本发明一个实施例的结构示意图。
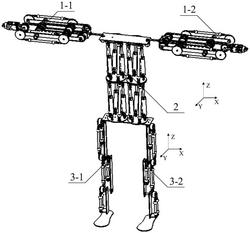
图2是本发明中柔性机器人越障的过程图。
图中,1-PVC薄膜;2-第一驱动足;3-第二驱动足;4-第三驱动足;5-第四驱动足;6-第五驱动足;7-第六驱动足;8-第一形状记忆合金弹簧;9-第二形状记忆合金弹簧;10-第一形状记忆合金丝;11-第二形状记忆合金丝;12-第三形状记忆合金丝;13-第四形状记忆合金丝。
具体实施方式
下面结合附图对本发明的技术方案做进一步的详细说明:
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
如图1所示,本发明基于压电驱动的柔性机器人包括包括PVC薄膜1、安装在PVC薄膜1上的第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5、第五驱动足6、第六驱动足7,所述的第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5相对于PVC薄膜1向前倾斜相同的角度以获得前进的推力,所述的第五驱动足6、第六驱动足7相对于PVC薄膜1竖直,纵向布置在PVC薄膜1上表面的第一形状记忆合金弹簧8、横向布置在PVC薄膜1上表面的第二形状记忆合金弹簧9、布置在PVC薄膜1下表面的第一形状记忆合金丝10、第二形状记忆合金丝11、第三形状记忆合金丝12、第四形状记忆合金丝13,所述第一形状记忆合金弹簧8、第二形状记忆合金弹簧9两端皆拉成挂钩形式固定在PVC薄膜1上,所述第一形状记忆合金弹簧8、第二形状记忆合金弹簧9形成十字型,所述第一形状记忆合金丝10、第二形状记忆合金丝11纵向布置,第三形状记忆合金丝12、第四形状记忆合金丝13横向布置,附着在PVC薄膜1的下表面,与之共同变形。
可以将所述第二形状记忆合金弹簧9的中间一圈拉开横跨在第一形状记忆合金弹簧8上,这样当第一形状记忆合金弹簧8收缩时,会带动第二形状记忆合金弹簧9形变,效果更好。
所述两组形状记忆合金丝也可以用两个形状记忆合金弹簧代替,布置在所述PVC薄膜的下表面,与上表面第一形状记忆合金和第二形状记忆合金弹簧的位置相对应,效果是一样的。
本发明还公开了基于压电驱动的柔性机器人的控制方法,其中,基于压电驱动的柔性机器人直线运动的控制方法如下:
对第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5施加同幅同频的正余弦电压,第五驱动足6、第六驱动足7不施加激励信号,使机器人产生向前的直线运动。
所述基于压电驱动的柔性机器人转弯的控制方法如下:
如果需要柔性机器人向右转弯,对第一驱动足2、第四驱动足5施加同幅同频的正余弦电压的作用下,第二驱动足3、第三驱动足4、第五驱动足6、第六驱动足7不施加激励信号;
如果需要柔性机器人向左转弯,对第二驱动足3、第三驱动足4施加同幅同频的正余弦电压,第一驱动足2、第四驱动足5、第五驱动足6、第六驱动足7不施加激励信号。
如图2所示,在基于上述工作方法的基础上,越过障碍的控制方法包括如下步骤:
步骤一:平面内运动过程中,前后腿部分,即第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5在同幅同频的正余弦电压的作用下,使机器人产生向前的直线运动;
步骤二:当第一驱动足2、第二驱动足3遇到障碍,关闭第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5的激励信号,通过加热第一形状记忆合金弹簧8,使其收缩,带动前腿部分,即第一驱动足2和第二驱动足3抬起,同时竖直的第五驱动足6、第六驱动足7向前滑移形成一定倾角;
步骤三:中间腿部分,即第五驱动足6、第六驱动足7在同幅同频的正余弦电压的作用下,使机器人产生向前的直线运动;
步骤四:当第五驱动足6、第六驱动足7遇到障碍,关闭第五驱动足6、第六驱动足7的激励信号,通过加热PVC薄膜1下表面的第一形状记忆合金丝10、第二形状记忆合金丝11,使其由弯曲状回复直线,带动前腿部分,即第一驱动足2和第二驱动足3落下。此时,第一驱动足2和第二驱动足3越过障碍;
步骤五:加热第二形状记忆合金弹簧9,使其收缩,带动中间腿部分,即第五驱动足6、第六驱动足7抬起;
步骤六:前后腿部分,即第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5在同幅同频的正余弦电压的作用下,使机器人产生向前的直线运动;
步骤七:当第三驱动足4、第四驱动足5遇到障碍,关闭第一驱动足2、第二驱动足3、第三驱动足4、第四驱动足5的激励信号,通过加热PVC薄膜1下表面的第三形状记忆合金丝12、第四形状记忆合金丝13,使其由弯曲状回复直线,带动中间腿部分,即第五驱动足6和第六驱动足7落下。此时第五驱动足6、第六驱动足7越过障碍;
步骤八:加热第一形状记忆合金弹簧8,使其收缩,带动后腿部分,即第三驱动足4和第四驱动足5抬起,同时竖直的第五驱动足6、第六驱动足7向后滑移形成一定倾角;
步骤九:前腿部分,即第一驱动足2、第二驱动足3在同幅同频的正余弦电压的作用下,使机器人产生向前的直线运动;
步骤十:当第三驱动足4和第四驱动足5越过障碍,关闭第一驱动足2、第二驱动足3的激励信号,通过加热PVC薄膜1下表面的第一形状记忆合金丝10、第二形状记忆合金丝11,使其由弯曲状回复直线,带动后腿部分,即第三驱动足4和第四驱动足5落下。整个机器人越过障碍。
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
基于压电驱动的柔性机器人及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0