











专利摘要
一种基于磁驱动微机器人的液体表面微构件传输方法及其装置,涉及微操作控制领域。本发明的目的在于提供结构简单的微机器人、操作便捷的装置和控制方便的转移方法用于液体表面微构件的传输。利用三对正交的亥姆霍兹线圈产生旋转磁场,控制微机器人在液体表面上操作微构件完成运动。利用微机器人与操作对象间的横向毛细作用力,使其被机器人捕获。施加旋转磁场驱动微机器人,微构件跟随机器人运动。通过改变磁场的旋转轴的方向,可以改变微机器人的运动方向,通过改变磁场的旋转频率,可以改变微机器人的行进速度。调整磁场的旋转频率和轴线方向,并借助磁场梯度,可实现微构件与微机器人脱离。
权利要求
1.基于磁驱动微机器人的液体表面微构件传输方法,其特征在于,
所述方法利用表面张力,使微机器人与微构件悬浮于液体表面;所述方法是基于磁驱动微机器人在液体表面对微构件进行接近、捕获、转移、释放操作的;所述磁驱动微机器人为五角星形薄片形状;
接近过程:通过外磁场驱动微机器人运动并靠近微构件;
捕获过程:在微机器人周围出现较大的液面下凹,使附近的微构件受到较强的横向毛细作用力被吸引,利用横向毛细作用力吸引微构件,实现微构件的捕获;
转移过程:施加旋转磁场驱动微机器人在液体表面旋转前进,通过改变磁场旋转轴的方向来改变微机器人的运动方向,通过改变磁场的旋转频率来改变微机器人的移动速度,微构件跟随微机器人沿预定轨迹运动,到达指定位置;
释放过程:施加低频率旋转磁场,增大转轴与竖直方向角度,使微构件与微机器人相互排斥,借助磁场梯度移开微机器人,实现微构件的释放。
2.根据权利要求1所述的基于磁驱动微机器人的液体表面微构件传输方法,其特征在于,所述微机器人由弹簧钢通过激光切割得到。
3.根据权利要求2所述的基于磁驱动微机器人的液体表面微构件传输方法,其特征在于,所述微机器人为五角星形磁性薄片,厚度为0.04mm,外缘半径0.4mm,沿径向磁化。
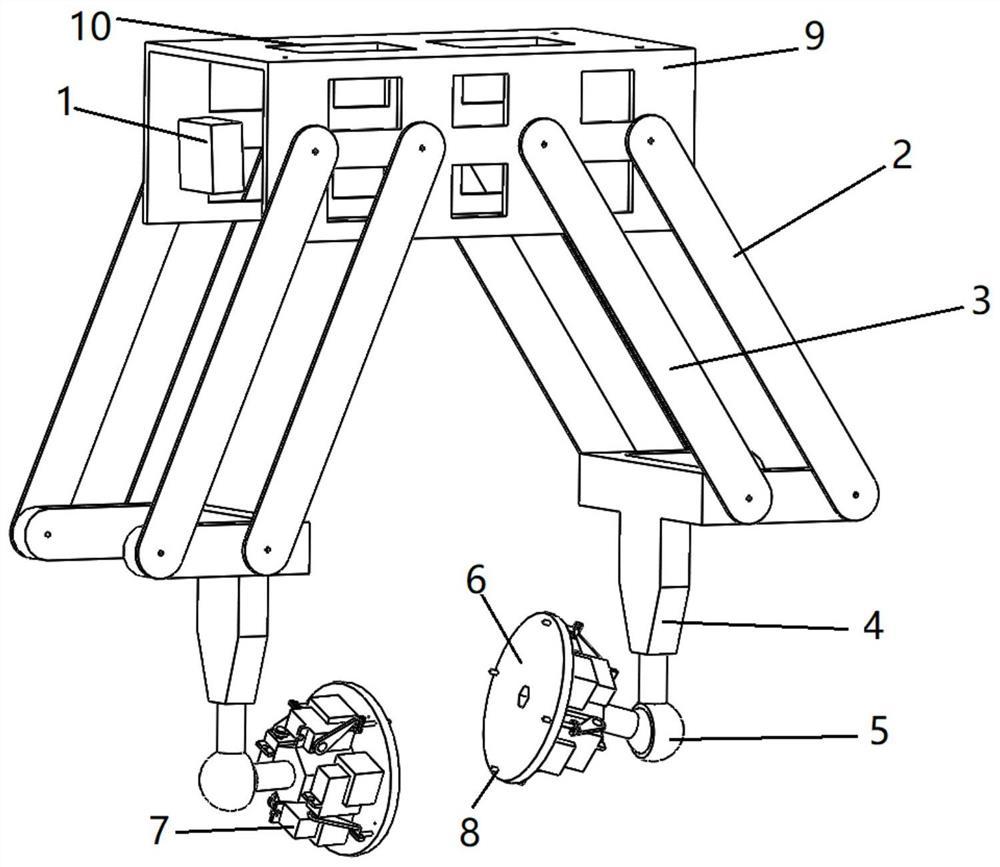
4.一种实现要求1、2或3所述方法的装置,其特征在于,所述装置包括载物台(5)、CCD显微镜(6)、CCD固定件(7)和磁场驱动装置(8);
磁场驱动装置(8)由线圈系统和三个驱动单元组成;
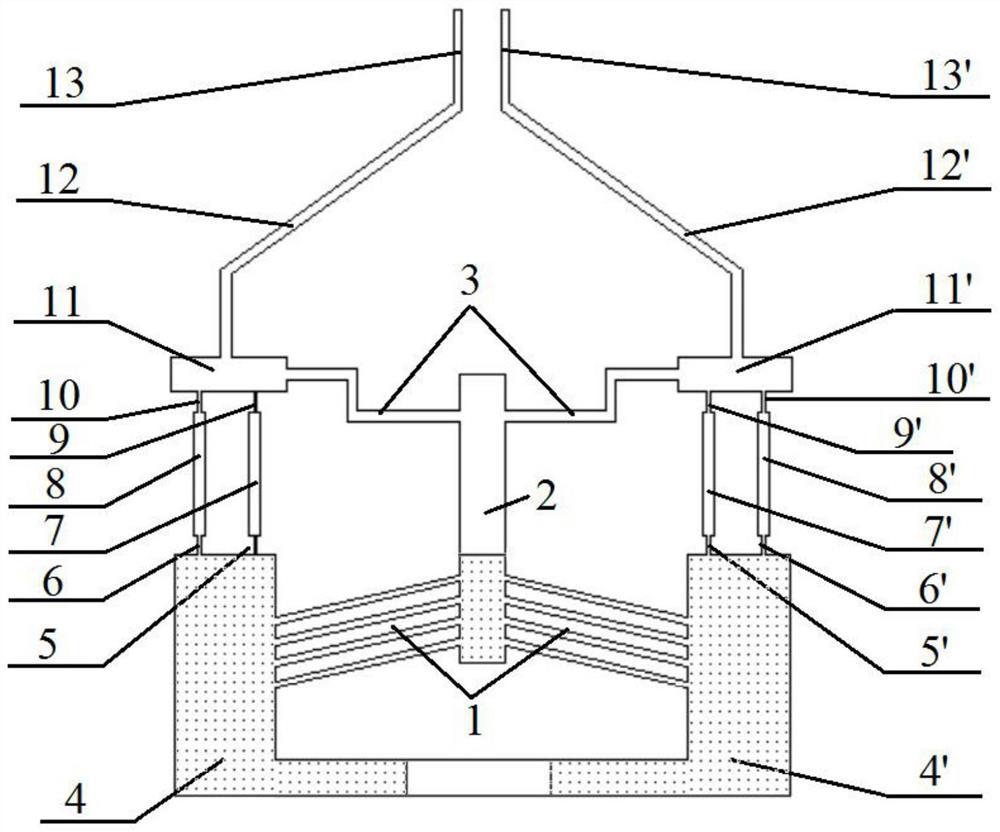
线圈系统由三组正交放置的亥姆霍兹线圈对组成,三组线圈由内至外其直径依次变大,每组有两个线圈;位于最内部的上下同轴设置的两组线圈为Z轴线圈,位于外部的左右同轴设置的两个线圈为X轴线圈,位于中部的左右同轴设置的两个线圈为Y轴线圈,两个X轴线圈的X轴、两个Y轴线圈的Y轴以及两个Z轴线圈的Z轴三者交于一点;
三个驱动单元和线圈系统中的三组线圈一一对应设置,每个驱动单元包括直流电源模块、D/A转换模块和线圈驱动器;直流电源模块用于为线圈驱动器提供电源,D/A转换模块的模拟信号输出端连接线圈驱动器的信号输入端,线圈驱动器的驱动信号输出端连接对应一组线圈的输入端;通过驱动单元调整三组线圈输入电压的幅值、频率和相位关系,可产生旋转的磁场;载物台(5)设置在磁场驱动装置(8)的两个Z轴线圈内;
载物台(5)用于放置盛装液体的容器;CCD显微镜(6)设置在磁场驱动装置(8)的上方,CCD显微镜(6)安装在CCD固定件(7)上,通过CCD显微镜(6)观察微机器人运动过程。
说明书
技术领域
本发明涉及微操作控制领域,具体地说是基于磁驱动微机器人的液体表面上微构件传输的装置及方法。
背景技术
随着微纳米技术的发展,微机器人得到广泛关注和快速发展,微机器人在微纳制造、靶向药物输送、微创手术、生物工程等领域具有广阔的应用前景。面向体内医疗、化学分析等领域的需求,液体内微机器人的研究已开展很多,多种液体环境微机器人的驱动方式、控制策略被提出,相关应用也得到进一步的拓展。然而还有一些应用,如水质监测、生物实验、污染物处理等,需要工作在液体表面的微机器人。然而目前研究的液体表面微机器人多为仿水黾结构,尺寸较大,不适合对微构件进行操作。另外,目前在液体表面上微构件的转移、运动控制等方面还没有可靠高效的方法,还无法完成液体表面上微构件的高精度操作。
发明内容
本发明的目的在于提供结构简单的微机器人磁驱动、操作便捷的实施装置和控制方便的转移方法用于液体表面微构件的传输。
本发明的目的是这样实现的:
基于磁驱动微机器人的液体表面微构件传输方法,所述方法利用表面张力,使微机器人与微构件(操作对象)悬浮于液体表面;所述方法是基于磁驱动微机器人在液体表面对微构件进行接近、捕获、转移、释放操作的;所述磁驱动微机器人为五角星形薄片形状;
接近过程:通过外磁场驱动微机器人运动并靠近微构件(操作对象);
捕获过程:在微机器人周围出现较大的液面下凹,使附近的微构件受到较强的横向毛细作用力被吸引,利用横向毛细作用力吸引操作对象,实现微构件的捕获;
转移过程:施加旋转磁场驱动微机器人在液体表面旋转前进,通过改变磁场旋转轴的方向来改变微机器人的运动方向,通过改变磁场的旋转频率来改变微机器人的移动速度,微构件跟随微机器人沿预定轨迹运动,到达指定位置;
释放过程:施加低频率旋转磁场,增大转轴与竖直方向角度,使微构件与微机器人相互排斥,借助磁场梯度移开微机器人,实现微构件的释放。
进一步地,所述微机器人由弹簧钢通过激光切割得到。
进一步地,所述微机器人为五角星形磁性薄片,厚度为0.04mm,外缘半径0.4mm,沿径向磁化。
之所以采用五角星形状,是因为相比圆形矩形等,五角星在液面引起的横向毛细力较小,可以减小毛细力对释放微构件过程的不利影响。
一种实现上述方法的装置,所述装置包括载物台5、CCD显微镜6、CCD固定件7和磁场驱动装置8;
磁场驱动装置8由线圈系统和三个驱动单元组成;
线圈系统由三组正交放置的亥姆霍兹线圈对组成,三组线圈由内至外其直径依次变大,每组有两个线圈;位于最内部的上下同轴设置的两组线圈为Z轴线圈,位于外部的左右同轴设置的两个线圈为X轴线圈,位于中部的左右同轴设置的两个线圈为Y轴线圈,两个X轴线圈的X轴、两个Y轴线圈的Y轴以及两个Z轴线圈的Z轴三者交于一点;
三个驱动单元和线圈系统中的三组线圈一一对应设置,每个驱动单元包括直流电源模块、D/A转换模块和线圈驱动器;直流电源模块用于为线圈驱动器提供电源,D/A转换模块的模拟信号输出端连接线圈驱动器的信号输入端,线圈驱动器的驱动信号输出端连接对应一组线圈的输入端(一组线圈有一个输入端);通过驱动单元调整三组(三对)线圈输入电压的幅值、频率和相位关系,可产生旋转的磁场;载物台5设置在磁场驱动装置8的两个Z轴线圈内;
载物台5用于放置盛装液体的容器;CCD显微镜6设置在磁场驱动装置8的上方,CCD显微镜6安装在CCD固定件7上,通过CCD显微镜6观察微机器人运动过程。
本发明利用表面张力,使微机器人与操作结构悬浮于液体表面。通过三对正交放置的亥姆霍兹线圈产生磁场,驱动微机器人运动并靠近操作对象。同时在微机器人周围出现较大的液面下凹,使附近的微构件受到较强的横向毛细作用力被吸引,实现捕获微构件。施加旋转磁场时,微机器人贴近微构件后继续旋转,附近流体运动造成微机器人的受力增大,推动其吸引微构件以较快的速度运动。通过改变磁场旋转轴方向改变运动方向,通过改变磁场频率改变运动速度,实现对微构件的转移。调整磁场旋转轴方向和频率,增大微机器人对操作结构的排斥力,用磁场梯度移开机器人,实现微构件释放。
本发明的实施装置主要包括容器、液体、微机器人、微构件、一套CCD摄像机、CCD支撑架、三对正交放置的亥姆霍兹线圈及其驱动单元组成的磁场驱动装置。
微机器人是由磁性材料制成的五角星形薄片结构,通过激光切割加工得到。
通过驱动单元向三对亥姆霍兹线圈分别通入电流,调整电流大小,使线圈产生旋转磁场驱动微机器人旋转前进。微机器人靠近操作对象后,利用横向毛细作用力捕获对象。通过调整三组线圈输入电压的幅值、频率和相位,改变磁场的旋转轴方向和频率,进而改变微机器人的运动方向和速度,使其操作微构件按照一定轨迹运动。降低磁场频率并增加旋转轴与竖直方向夹角,使操作对象收到的排斥力增大,周期内受力时间增加,并使用磁场梯度单独移开微机器人,实现微构件释放。
本发明具有以下有益技术效果:
本发明使用外磁场驱动,微机器人结构简单,尺寸较小,能对微构件进行灵活操作。操作过程中仅改变磁场驱动装置输入电流参数即可完成操作任务,控制简单可靠。可以操作微构件灵活运动,还能装配微构件,构建平面结构。操作过程中摩擦力很小,不会造成微构件的磨损和变形。
本发明利用磁场驱动装置产生旋转磁场,控制微机器人在液体表面上操作微构件完成运动。利用液体表面上微机器人与操作对象间的横向毛细作用力,使微构件被机器人捕获。施加旋转磁场,驱动微机器人,微构件跟随机器人运动。施加旋转磁场时,通过改变磁场的旋转轴的方向,可以改变微机器人的运动方向,通过改变磁场的旋转频率,可以改变微机器人的行进速度。调整磁场的旋转频率和轴线方向,并借助磁场梯度,可实现操作对象与微机器人脱离。利用此方法可以实现微构件的捕获、转移和组装。
附图说明
图1是操作环境图;
图2是实施装置图;
图3是磁场驱动装置的驱动原理图;
图4是操作过程图;图中a)、b)、c)、d)分别表示接近微构件、捕获微构件、转移微构件、释放微构件四个阶段,各阶段中上图表示水平方向观察视图,下图为俯视观察视图。
具体实施方式
下面结合附图举例对本发明作更详细的描述:
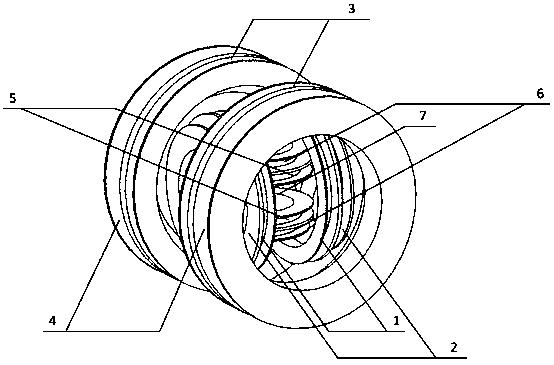
本发明的操作环境如图1所示,包括微机器人1、液体2、微构件3、容器4。微机器人1为五角星形磁性薄片,材料为弹簧钢,通过激光切割得到。机器人厚度为0.04mm,外缘半径0.4mm,沿径向磁化。微机器人1和微构件3表面张力作用下浮在液体2表面,摩擦力可忽略不计。
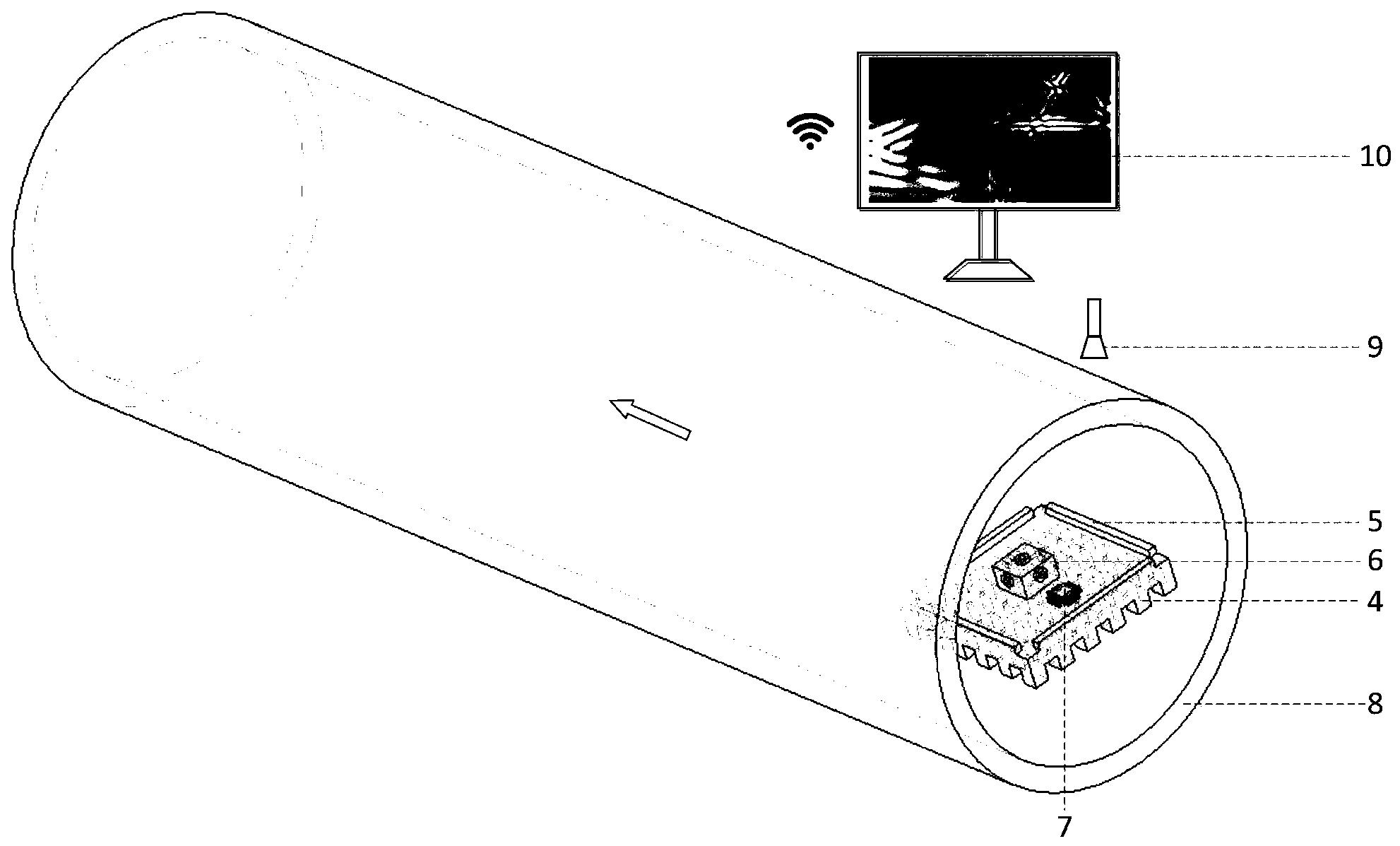
本发明的实施装置如图2所示,包括载物台5、CCD显微镜6、CCD固定件7和磁场驱动装置8组成。工作时图1中容器置于载物台5中心,通过调整磁场驱动装置8产生旋转磁场驱动微机器人操作微构件。通过CCD显微镜6观察运动过程,根据需要改变线圈输入,完成操作过程。
结合图3说明磁场驱动装置8的工作原理。磁场驱动装置8中的三个驱动单元和三组线圈一一对应,每个驱动单元包括直流电源模块、D/A转换模块和线圈驱动器。直流电源模块用于为线圈驱动器提供电源,D/A转换模块的模拟信号输出端连接线圈驱动器的信号输入端,线圈驱动器的驱动信号输出端连接对应线圈的输入端。通过调整驱动单元的输入信号,调整三对线圈输入电压的幅值、频率和相位关系,可产生绕任意轴线的旋转磁场,驱动微机器人。
结合图4说明微构件的转移过程。典型的微构件转移过程分为四个阶段:接近微构件、捕获微构件、转移微构件、释放微构件。各阶段分别如图4中a)、b)、c)、d)所示。其中上图表示水平方向观察视图,下图为俯视观察视图。图4a)表示施加旋转磁场,旋转轴与竖直轴不重合,使微机器人产生绕竖直轴旋转与竖直面振荡的复合运动,微机器人可以在水平面移动,接近微构件。图4b)表示微机器人接近操作对象后,其周围下凹液面对微构件产生较大横向毛细作用力,吸引微构件贴近并跟随微机器人,完成微构件的捕获。图4c)表示微机器人操作微构件运动,通过调整磁场旋转轴单位向量水平分量改变转轴方向,控制微机器人运动方向,并影响微构件与机器人的相对位置;通过改变磁场频率,改变微机器人的行进速度,能完成微构件转移和组装。图4d)表示降低磁场旋转频率,增大转轴与竖直方向夹角,增大微机器人与微构件间排斥力的强度和作用时间,微机器人将周期性贴近和远离微构件,在远离过程间施加磁场梯度,移开微机器人,完成微构件的释放。
基于磁驱动微机器人的液体表面微构件传输方法及其装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0