










专利摘要
本实用新型提供了一种机械制造推动手摇式搬运装置,包括:右手柄、保护壳、链条、装载板:所述连接轴的顶端右侧设置有第一齿轮,且第一齿轮通过轴接方式与连接轴相连接;所述第一齿轮的右侧设置有右手柄,且右手柄通过轴接方式与第一齿轮相连接;所述第一齿轮的外侧设置有保护壳,且保护壳通过螺栓与连接轴相连接;所述连接轴的左侧设置有左手柄,且左手柄通过轴接方式与连接轴相连接;所述连接轴的下方设置有连接套,且连接套通过套合方式与连接轴相连接,本实用新型通过对一种机械制造推动手摇式搬运装置的改进,具有结构简单、省时省力,节省人力物力的优点,从而有效的解决了本实用新型在背景技术一项中提出的问题和不足。
权利要求
1.一种机械制造推动手摇式搬运装置,包括:右手柄(1)、保护壳(2)、链条(3)、装载板(4)、从动轮(5)、左手柄(6)、连接轴(7)、连接套(8)、车叉(9)、行走轮(10)、第一齿轮(11)、连接支臂(12)、第二齿轮(13)、轴承(801)、卡环(802);其特征在于:所述连接轴(7)的顶端右侧设置有第一齿轮(11),且第一齿轮(11)通过轴接方式与连接轴(7)相连接;所述第一齿轮(11)的右侧设置有右手柄(1),且右手柄(1)通过轴接方式与第一齿轮(11)相连接;所述第一齿轮(11)的外侧设置有保护壳(2),且保护壳(2)通过螺栓与连接轴(7)相连接;所述连接轴(7)的左侧设置有左手柄(6),且左手柄(6)通过轴接方式与连接轴(7)相连接;所述连接轴(7)的下方设置有连接套(8),且连接套(8)通过套合方式与连接轴(7)相连接;所述连接轴(7)与连接套(8)的连接处设置有卡环(802),且卡环(802)通过卡合方式与连接轴(7)过盈方式与连接套(8)相连接;所述连接套(8)的外壁两侧设置有连接支臂(12),且连接支臂(12)的一端通过焊接方式与连接套(8)相连接;所述连接支臂(12)的另一端设置有装载板(4),且装载板(4)通过焊接方式与连接支臂(12)相连接;所述装载板(4)底侧的右端设置有从动轮(5),且从动轮(5)通过螺栓与装载板(4)相连接;所述连接轴(7)的下端设置有车叉(9),且车叉(9)通过焊接方式与连接轴(7)相连接;所述车叉(9)底端内侧设置有行走轮(10),且行走轮(10)通过螺栓与行走轮(10)相连接;所述行走轮(10)的右侧设置有第二齿轮(13),且第二齿轮(13)通过轴接方式与行走轮(10)相连接;所述第二齿轮(13)的外侧设置有链条(3),且链条(3)通过啮合方式与第二齿轮(13)相连接。
2.根据权利要求1所述的一种机械制造推动手摇式搬运装置,其特征在于:所述连接轴(7)一次贯穿卡环(802)与轴承(801),且连接轴(7)与车叉(9)呈倾斜状设置,连接轴(7)与车叉(9)的倾斜角度为50度。
3.根据权利要求1所述的一种机械制造推动手摇式搬运装置,其特征在于:所述右手柄(1)与左手柄(6)通过旋转为行走轮(10)的动力装置,且右手柄(1)与左手柄(6)的旋转角度为0-360度。
4.根据权利要求1所述的一种机械制造推动手摇式搬运装置,其特征在于:所述第一齿轮(11)的大小是第二齿轮(13)大小的二分之一。
5.根据权利要求1所述的一种机械制造推动手摇式搬运装置,其特征在于:所述连接支臂(12)呈┐状设置有两根,且连接支臂(12)为左右对称式结构设置。
6.根据权利要求1所述的一种机械制造推动手摇式搬运装置,其特征在于:所述连接轴(7)与车叉(9)通过右手柄(1)与左手柄(6)为转动装置,且连接轴(7)与车叉(9)的左右转动角度均为0-30度。
说明书
技术领域
本实用新型涉及机械制造技术领域,更具体的说,尤其涉及一种机械制造推动手摇式搬运装置。
背景技术
机械制造在我国是工业的重点行业,由于发达国家转移工业产业,所以使我国及东南亚国家,这些具有较丰富劳动力资源的国家,在机械制造业领域有了长足的发展的机遇,机械制造行业属于典型的劳动密集型行业,生产车间主要按工艺布局,并以多种小批量生产为主。
机械制造是指把原材料变为成品的全过程,而在生产过程中,需要搬运较大的货物,传统的搬运货物时,需要人力搬运,费时费力,耽误时间,经常出现让货物砸伤的情况,而手摇式搬运车可以替代传统以人力搬运工具的搬运设备,可以节省大量的人力及时间,方便实用。
有鉴于此,针对现有的问题予以研究改良,提供一种机械制造推动手摇式搬运装置,旨在通过该技术,达到解决问题与提高实用价值性的目的。
实用新型内容
本实用新型的目的在于提供一种机械制造推动手摇式搬运装置,以解决上述背景技术中提出的人力搬运货物,费时费力,耽误时间,经常出现让货物砸伤的情况的问题和不足。
为实现上述目的,本实用新型提供了一种机械制造推动手摇式搬运装置,由以下具体技术手段所达成:
一种机械制造推动手摇式搬运装置,包括:右手柄、保护壳、链条、装载板、从动轮、左手柄、连接轴、连接套、车叉、行走轮、第一齿轮、连接支臂、第二齿轮、轴承、卡环;所述连接轴的顶端右侧设置有第一齿轮,且第一齿轮通过轴接方式与连接轴相连接;所述第一齿轮的右侧设置有右手柄,且右手柄通过轴接方式与第一齿轮相连接;所述第一齿轮的外侧设置有保护壳,且保护壳通过螺栓与连接轴相连接;所述连接轴的左侧设置有左手柄,且左手柄通过轴接方式与连接轴相连接;所述连接轴的下方设置有连接套,且连接套通过套合方式与连接轴相连接;所述连接轴与连接套的连接处设置有卡环,且卡环通过卡合方式与连接轴过盈方式与连接套相连接;所述连接套的外壁两侧设置有连接支臂,且连接支臂的一端通过焊接方式与连接套相连接;所述连接支臂的另一端设置有装载板,且装载板通过焊接方式与连接支臂相连接;所述装载板底侧的右端设置有从动轮,且从动轮通过螺栓与装载板相连接;所述连接轴的下端设置有车叉,且车叉通过焊接方式与连接轴相连接;所述车叉底端内侧设置有行走轮,且行走轮通过螺栓与行走轮相连接;所述行走轮的右侧设置有第二齿轮,且第二齿轮通过轴接方式与行走轮相连接;所述第二齿轮的外侧设置有链条,且链条通过啮合方式与第二齿轮相连接。
作为本技术方案的进一步优化,本实用新型一种机械制造推动手摇式搬运装置所述连接轴一次贯穿卡环与轴承,且连接轴与车叉呈倾斜状设置,连接轴与车叉的倾斜角度为50度。
作为本技术方案的进一步优化,本实用新型一种机械制造推动手摇式搬运装置所述右手柄与左手柄通过旋转为行走轮的动力装置,且右手柄与左手柄的旋转角度为0-360度。
作为本技术方案的进一步优化,本实用新型一种机械制造推动手摇式搬运装置所述第一齿轮的大小是第二齿轮大小的二分之一。
作为本技术方案的进一步优化,本实用新型一种机械制造推动手摇式搬运装置所述连接支臂呈┐状设置有两根,且连接支臂为左右对称式结构设置。
作为本技术方案的进一步优化,本实用新型一种机械制造推动手摇式搬运装置所述连接轴与车叉通过右手柄与左手柄为转动装置,且连接轴与车叉的左右转动角度均0-30度。
由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
1、本实用新型一种机械制造推动手摇式搬运装置,通过连接轴一次贯穿卡环与轴承,且连接轴与车叉呈倾斜状设置,连接轴与车叉的倾斜角度为50度的设置,有利于工人在使用装置时,避免工人在行走时,脚部与行走轮发生碰撞,造成使用不方便的现象。
2、本实用新型一种机械制造推动手摇式搬运装置,通过右手柄与左手柄通过旋转为行走轮的动力装置,且右手柄与左手柄的旋转角度为0-360度的设置,通过外力旋转右手柄与左手柄,带动第一齿轮与第二齿轮的转动,使装置移动,减少了人力搬运货物费时费力的现象,且操作方便,并且第一齿轮的大小是第二齿轮大小的二分之一,有效的减轻了工人的劳动力,省时省力。
3、本实用新型一种机械制造推动手摇式搬运装置,通过连接轴与车叉通过右手柄与左手柄为转动装置,且连接轴与车叉的左右转动角度均0-30度的设置,有利于装置可以通过右手柄与左手柄为转动可以改变运行方向。
4、本实用新型通过对一种机械制造推动手摇式搬运装置的改进,具有结构简单、省时省力,节省人力物力的优点,从而有效的解决了本实用新型在背景技术一项中提出的问题和不足。
附图说明
构成本申请的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
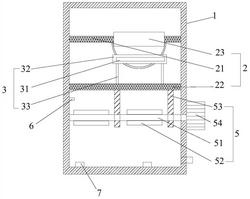
图1为本实用新型的结构示意图;
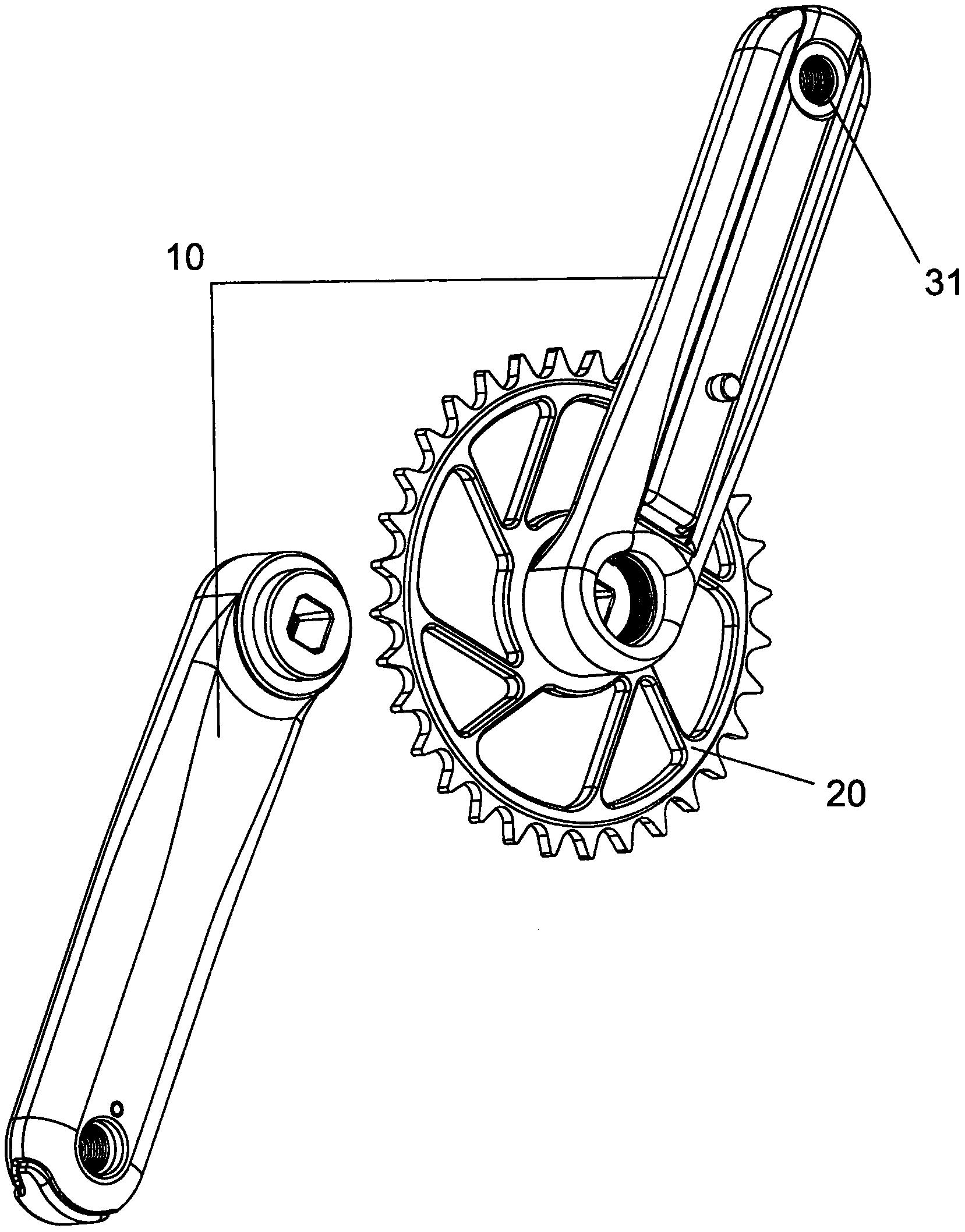
图2为本实用新型的侧视结构示意图;
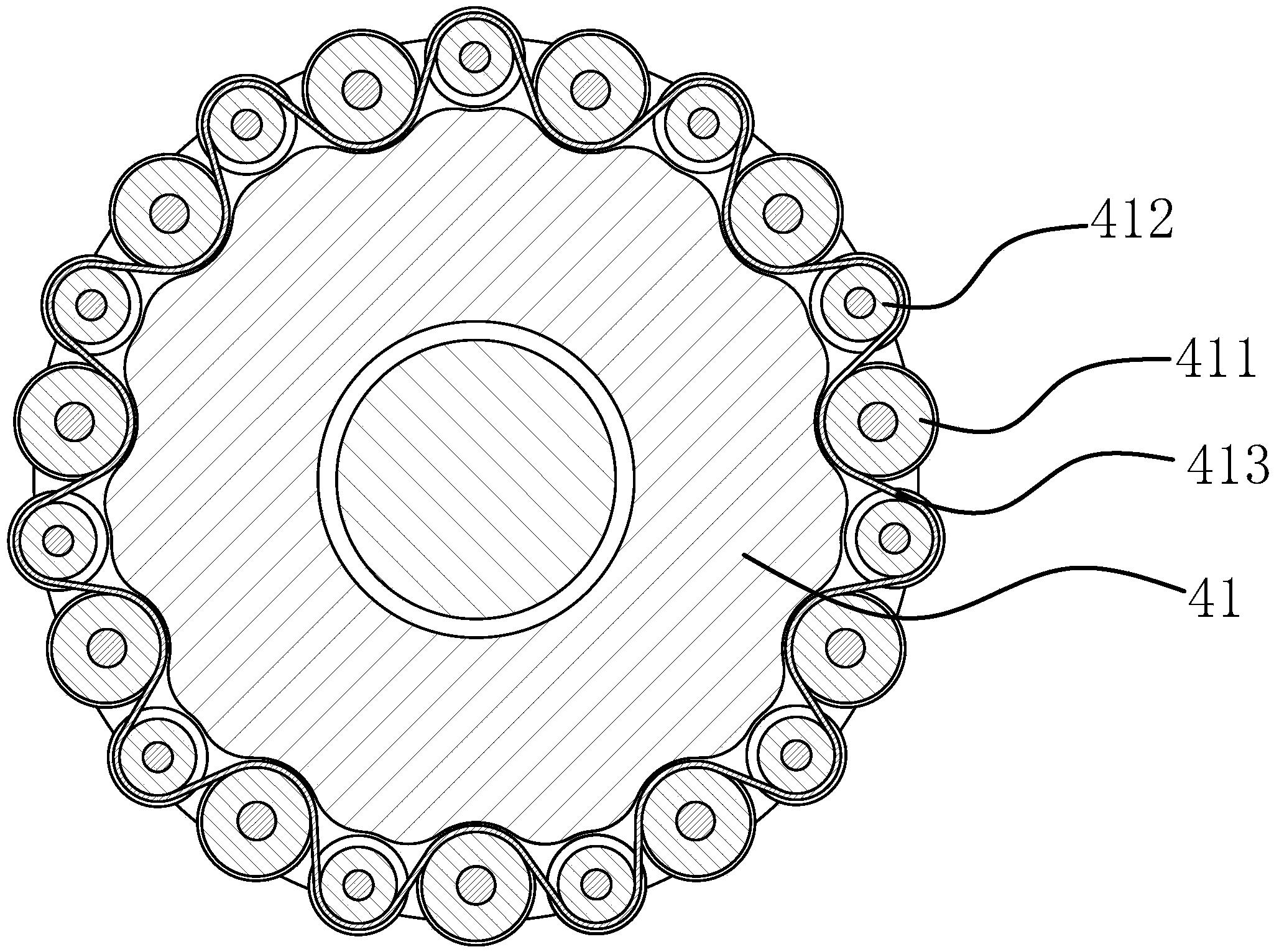
图3为本实用新型的连接轴与连接套结构示意图。
图中:右手柄1、保护壳2、链条3、装载板4、从动轮5、左手柄6、连接轴7、连接套8、车叉9、行走轮10、第一齿轮11、连接支臂12、第二齿轮13、轴承801、卡环802。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
需要说明的是,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
同时,在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电性连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
请参见图1至图3,本实用新型提供一种机械制造推动手摇式搬运装置的具体技术实施方案:
一种机械制造推动手摇式搬运装置,包括:右手柄1、保护壳2、链条3、装载板4、从动轮5、左手柄6、连接轴7、连接套8、车叉9、行走轮10、第一齿轮11、连接支臂12、第二齿轮13、轴承801、卡环802;连接轴7的顶端右侧设置有第一齿轮11,且第一齿轮11通过轴接方式与连接轴7相连接;第一齿轮11的右侧设置有右手柄1,且右手柄1通过轴接方式与第一齿轮11相连接;第一齿轮11的外侧设置有保护壳2,且保护壳2通过螺栓与连接轴7相连接;连接轴7的左侧设置有左手柄6,且左手柄6通过轴接方式与连接轴7相连接;连接轴7的下方设置有连接套8,且连接套8通过套合方式与连接轴7相连接;连接轴7与连接套8的连接处设置有卡环802,且卡环802通过卡合方式与连接轴7过盈方式与连接套8相连接;连接套8的外壁两侧设置有连接支臂12,且连接支臂12的一端通过焊接方式与连接套8相连接;连接支臂12的另一端设置有装载板4,且装载板4通过焊接方式与连接支臂12相连接;装载板4底侧的右端设置有从动轮5,且从动轮5通过螺栓与装载板4相连接;连接轴7的下端设置有车叉9,且车叉9通过焊接方式与连接轴7相连接;车叉9底端内侧设置有行走轮10,且行走轮10通过螺栓与行走轮10相连接;行走轮10的右侧设置有第二齿轮13,且第二齿轮13通过轴接方式与行走轮10相连接;第二齿轮 13的外侧设置有链条3,且链条3通过啮合方式与第二齿轮13相连接。
具体的,连接轴7依次贯穿卡环802与轴承801,且连接轴7与车叉9呈倾斜状设置,连接轴7与车叉9的倾斜角度为50度,连接轴7的顶端设置有轴承座,轴承座与第一齿轮13相连接。
具体的,右手柄1与左手柄6通过旋转为行走轮10的动力装置,且右手柄 1与左手柄6的旋转角度为0-360度。
具体的,第一齿轮11的大小是第二齿轮13大小的二分之一。
具体的,连接支臂12呈┐状设置有两根,且连接支臂12为左右对称式结构设置。
具体的,连接轴7与车叉9通过右手柄1与左手柄6为转动装置,且连接轴 7与车叉9的左右转动角度均为0-30度。
具体实施步骤:
首先将货物放置在装载板4的顶侧,然后工人将双手分别握紧右手柄1与左手柄6,通过自身的力量使右手柄1与左手柄6旋转,顺时针转动右手柄1与左手柄6时,带动第一齿轮13的转动,第一齿轮13与第二齿轮11通过链条3啮合连接,从而使第二齿轮11转动,第二齿轮13的转动使从动轮10转动,从而使装置前行,当装置拐弯时,通过自身的力量转动右手柄1与左手柄6,带动连接轴7与车叉9的转动,使行走轮10的运行轨迹发生改变,从而使装置改变运行轨迹。
综上所述:该一种机械制造推动手摇式搬运装置,通过连接轴一次贯穿卡环与轴承,且连接轴与车叉呈倾斜状设置,连接轴与车叉的倾斜角度为50度的设置,有利于工人在使用装置时,避免工人在行走时,脚部与行走轮发生碰撞,造成使用不方便的现象,通过右手柄与左手柄通过旋转为行走轮的动力装置,且右手柄与左手柄的旋转角度为0-360度的设置,通过外力旋转右手柄与左手柄,带动第一齿轮与第二齿轮的转动,使装置移动,减少了人力搬运货物费时费力的现象,且操作方便,并且第一齿轮的大小是第二齿轮大小的二分之一,有效的减轻了工人的劳动力,省时省力,通过连接轴与车叉通过右手柄与左手柄为转动装置,且连接轴与车叉的左右转动角度均0-30度的设置,有利于装置可以通过右手柄与左手柄为转动可以改变运行方向,解决了人力搬运货物,费时费力,耽误时间,经常出现让货物砸伤的情况的问题。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
一种机械制造推动手摇式搬运装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0