

IPC分类号 : B62L1/00,B62L3/00,B62J45/00,B62J45/40,G05D13/62








专利摘要
本实用新型公开了一种自行车自动控速的控制装置,包括集成电路板、直流电机、舵机、霍尔传感器模块、超声波传感器模块、电机驱动芯片、7.2V电池电源;所述的集成电路板包括主控芯片、隔离CAN模块芯片、电机和舵机稳压芯片、电机驱动芯片,所述的集成电路用于执行自行车自动控速算法,所述直流电机用于张紧自行车刹车线,实现对自行车行驶速度的控制,所述的超声波传感器模块用于采集自行车前方障碍物的距离信息,实现自行车对前方障碍物的感知,所述的霍尔传感器模块用于采集自行车后轮的实时速度以及加速度信息。本实用新型通过对自行车前方的路面障碍物信息和车速信息的采集、处理、判断,有利于提高自行车行驶的安全性。
权利要求
1.一种自行车自动控速的控制装置,其特征在于:包括集成电路板、直流电机(14)、舵机、霍尔传感器模块、超声波传感器模块、电机驱动芯片(1)、7.2V电池电源;所述的集成电路板包括主控芯片(6)、隔离CAN模块芯片(2)、电机和舵机稳压芯片(4)、电机驱动芯片(1),所述的集成电路板用于执行自行车速度自动控制的算法,所述的电池电源通过稳压电源芯片(9)为主控芯片(6)供电,所述的稳压电源芯片(9)用于将7.2V电池电源稳压成3.3V给主控芯片(6)供电,电池电源通过电机和舵机稳压芯片(4)分别为电机和舵机供电,所述隔离CAN模块芯片(2)用于与控制芯片进行CAN通信,所述的电机驱动芯片(1)用于驱动直流电机(14),所述直流电机(14)的输出轴与刹车线进行连接,直流电机(14)用于张紧自行车的刹车线,实现对自行车车速的控制,所述的超声波传感器模块用于采集自行车前方障碍物的距离信息,所述的超声波模块通过超声波支架与舵机输出轴相连,舵机用于驱动超声波传感器的探头来回往复摆动,所述的舵机通过舵机支架安装在自行车的前部位置,所述的霍尔传感器模块用于采集自行车后轮的实时速度以及加速度信息,所述的霍尔传感器模块通过安装支架安装在自行车后部位置。
2.根据权利要求1所述的一种自行车自动控速的控制装置,其特征在于:所述的主控芯片(6)采用STM32F407ZET6。
3.根据权利要求1所述的一种自行车自动控速的控制装置,其特征在于:所述的电机驱动芯片(1)采用IRLR7843TRBF。
4.根据权利要求1所述的自行车自动控速的控制装置,其特征在于:所述的电机和舵机稳压芯片(4)采用LM2941。
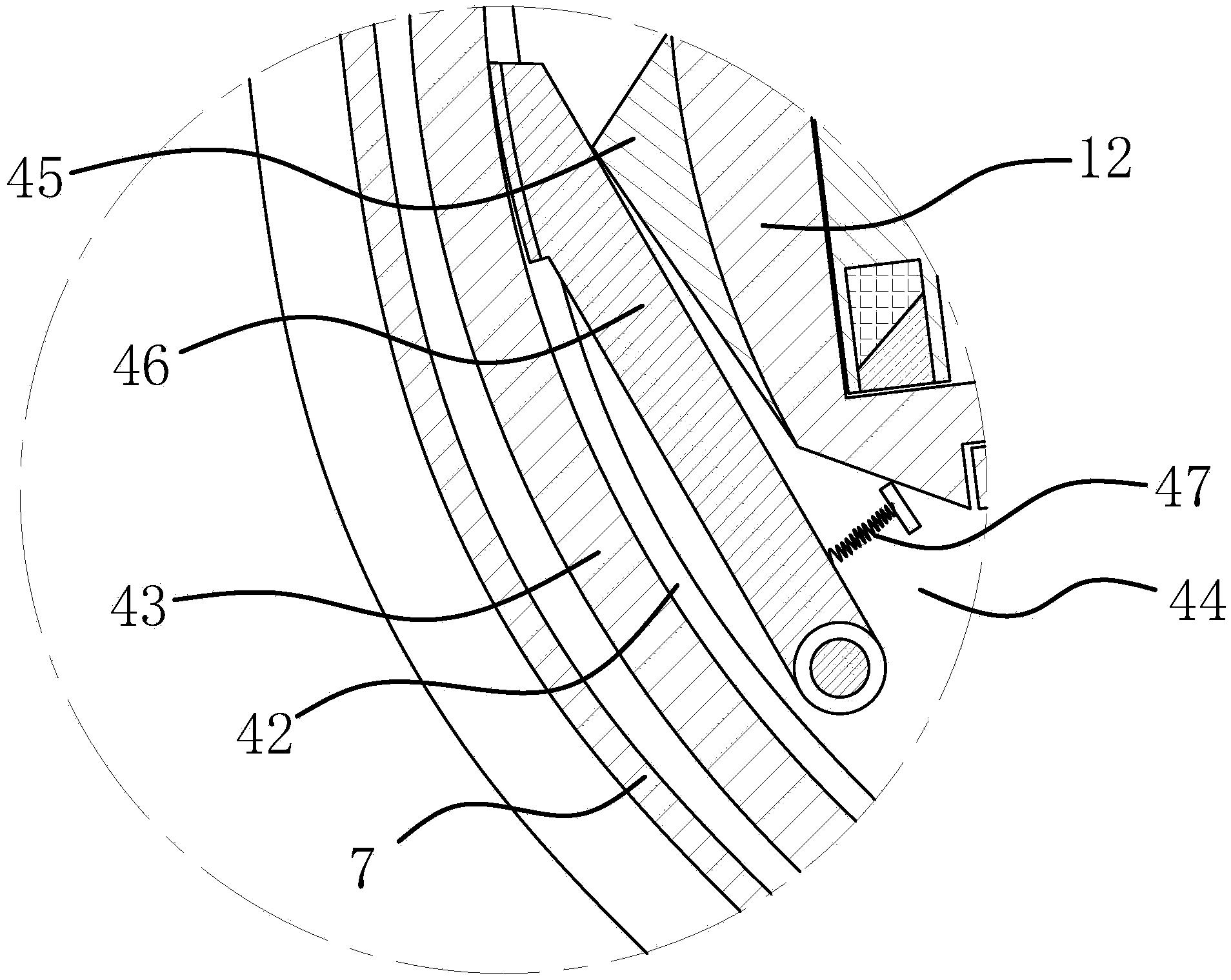
5.根据权利要求1所述的一种自行车自动控速的控制装置,其特征在于:所述的直流电机(14)通过套筒(12)与自行车刹车线进行连接,所述的自行车刹车线从套筒(12)上的套筒孔(13)中穿过。
6.根据权利要求1所述的一种自行车自动控速的控制装置,其特征在于:所述集成电路板还包括舵机接口(10)、电机接口(3)、传感器接口(8)、电源接口(5),所述的舵机接口(10)用于与舵机相连,所述的电机接口(3)与直流电机(14)相连,所述传感器接口(8)分别与超声波传感器模块和霍尔式传感器模块相连,所述的电源接口(5)与7.2V电池电源相连。
7.根据权利要求1所述的一种自行车自动控速的控制装置,其特征在于:所述集成电路板还包括电源开关组件(7),分别实现对舵机、直流电机(14)以及主控芯片(6)电源通断电的控制。
8.根据权利要求1所述的自行车自动控速的控制装置,其特征在于:所述集成电路板上还设有外接接口(11),用于与控制芯片通过隔离CAN模块芯片(2)进行CAN通信。
说明书
技术领域
本实用新型涉及自行车技术领域,尤其涉及一种自行车自动控速的控制装置。
背景技术
随着人们环保意识的提高,自行车作为绿色出行的重要交通越来越受到人们的青睐。但是,自行车在满足人们轻量化交通工具需求的同时,却存在一定的安全隐患。人们使用自行车时,特别是青少年,由于行驶速度过快,行驶道路障碍物距离信息判断失误,而造成的人身伤害时有发生。
实用新型内容
本实用新型的目的在于针对上述问题,提供一种自行车自动控速的控制装置,通过对自行车前方的路面障碍物信息和车速信息的采集、处理、判断,进而对自行车的行驶速度进行控制,有利于提高自行车行驶的安全性。
为达到上述目的,本实用新型采用如下技术方案:一种自行车自动控速的控制装置,包括集成电路板、直流电机、舵机、霍尔传感器模块、超声波传感器模块和7.2V电池电源;所述的集成电路板包括主控芯片、隔离CAN模块芯片、电机和舵机稳压芯片以及电机驱动芯片,所述的集成电路板用于执行自行车速度自动控制的算法,所述的电池电源通过稳压电源芯片为主控芯片供电,电池电源通过电机和舵机稳压芯片分别为电机和舵机供电,所述隔离CAN模块芯片用于与控制芯片进行CAN通信,所述的电机驱动芯片用于驱动直流电机,所述直流电机的输出轴与刹车线进行连接,直流电机用于张紧自行车的刹车线,实现对自行车车速的控制,所述的超声波传感器模块用于采集自行车前方障碍物的距离信息,所述的超声波模块通过超声波支架与舵机输出轴相连,舵机用于驱动超声波传感器的探头来回往复摆动,所述的舵机通过舵机支架安装在自行车的前部位置,所述的霍尔传感器模块用于采集自行车后轮的实时速度以及加速度信息,所述的霍尔传感器模块通过安装支架安装在自行车后部位置。
进一步的,所述的主控芯片采用STM32F407ZET6。
进一步的,所述的电机驱动芯片采用IRLR7843TRBF。
进一步的,所述的电机和舵机稳压芯片采用LM2941。
进一步的,所述的直流电机通过套筒与自行车刹车线进行连接,所述的自行车刹车线从套筒上的套筒孔中穿过。
进一步的,所述集成电路板还包括舵机接口、电机接口、传感器接口、电源接口,所述的舵机接口用于与舵机相连,所述的电机接口与直流电机相连,所述传感器接口分别与超声波传感器模块和霍尔式传感器模块相连,所述的电源接口与7.2V电池电源相连。
进一步的,所述集成电路板还包括电源开关组件,分别实现对舵机、直流电机以及主控芯片电源通断电的控制。
进一步的,所述集成电路板上还设有外接接口,用于与其他控制芯片通过隔离CAN模块芯片进行CAN通信,方便后续对本实用新型的功能进行扩展。
通过采用上述技术方案,本实用新型的有益效果为:本实用新型的设计通过多个开关组分开控制供电,保证了集成电路板运行的稳定性;集成电路板上还设有外接接口,作为冗余设计,可以与其他控制芯片进行CAN通信,有利于功能扩展和兼容性的提高;本实用新型通过对自行车前方的路面障碍物信息和车速信息的采集、处理、判断,来对自行车的行驶速度进行控制,可减少安全事故的发生,有利于提高自行车行驶的安全性。
附图说明
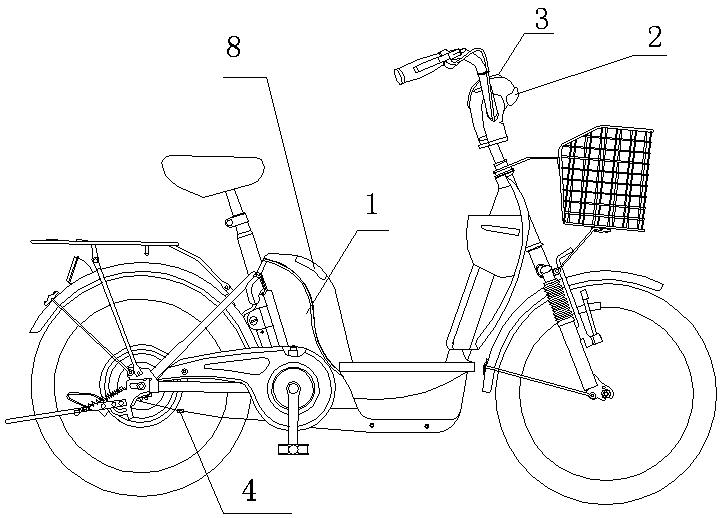
附图1为本实用新型的集成电路板示意图;
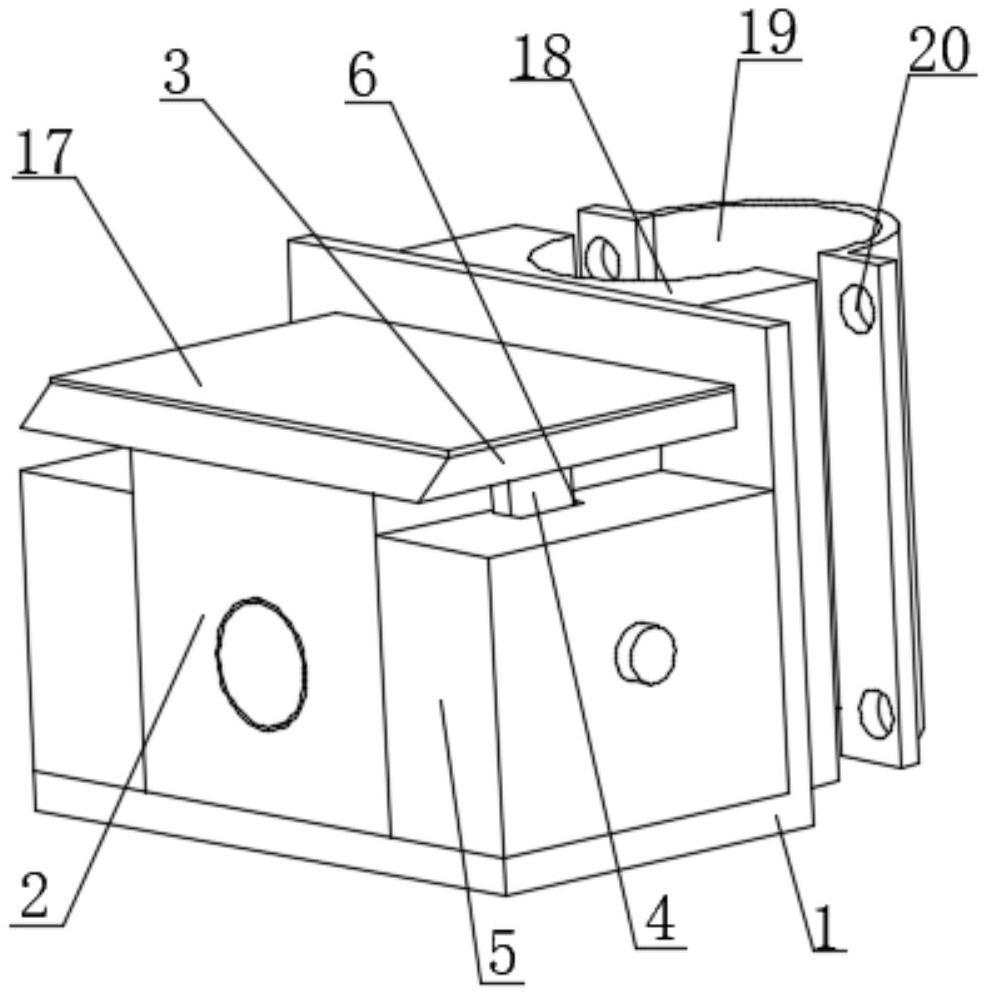
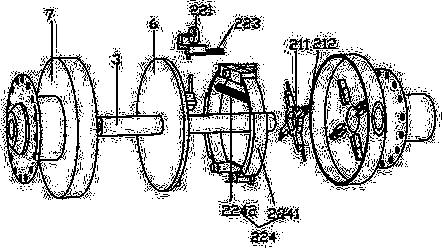
附图2为本实用新型的电机示意图;
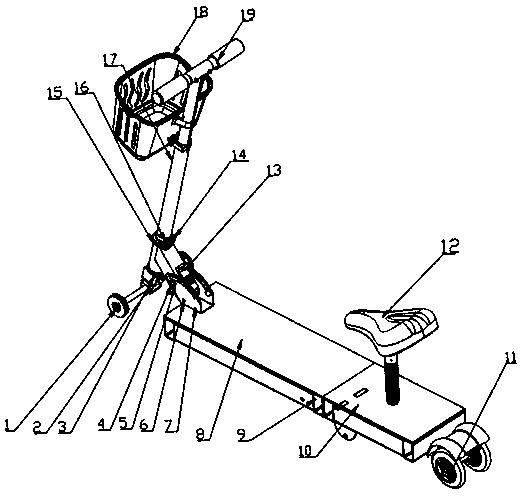
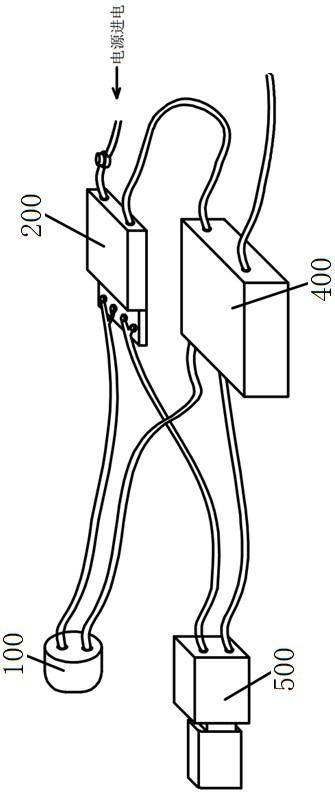
附图3为本实用新型的电路连接示意图。
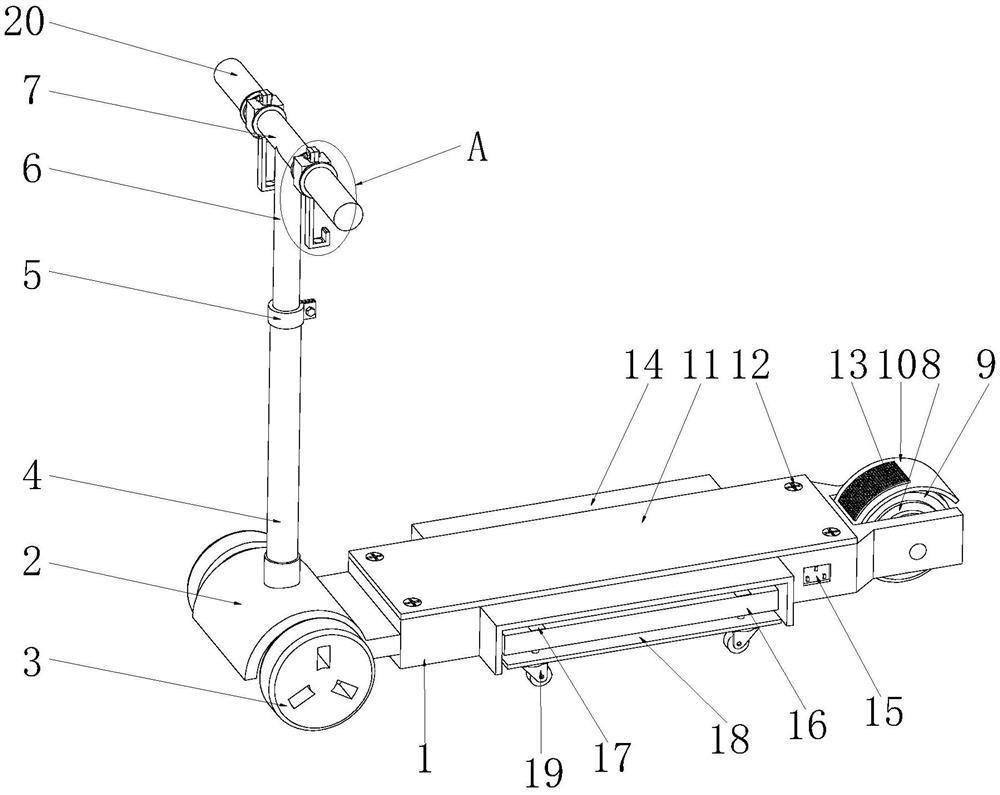
标注说明:1-电机驱动芯片,2-隔离CAN模块芯片,3-电机接口, 4-电机和舵机稳压芯片,5-电源接口,6-主控芯片,7-电源开关组件, 8-传感器接口,9-稳压电源芯片,10-舵机接口,11-外接接口,12-套筒,13-套筒孔,14-直流电机,15-电机正负极。
具体实施方式
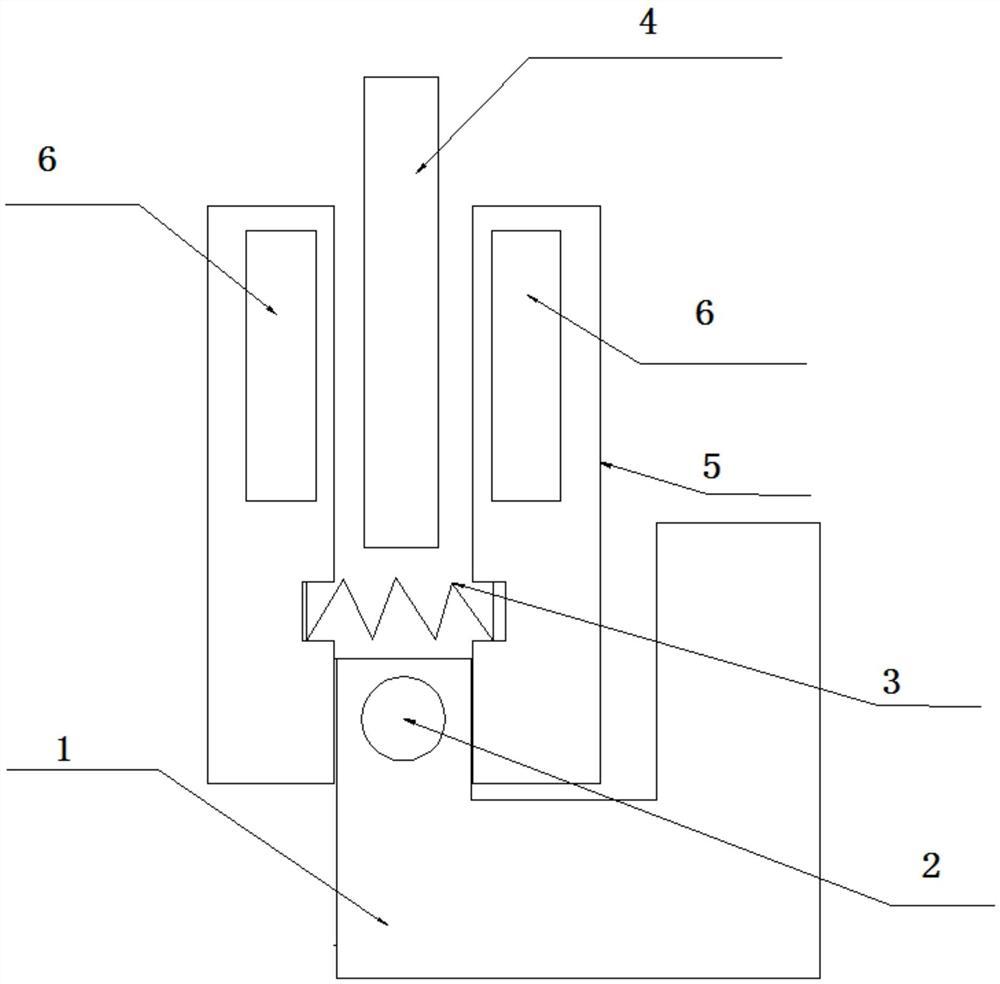
请参阅图1或2所示,一种自行车自动控速的控制装置,包括集成电路板、直流电机、舵机、霍尔传感器模块、超声波传感器模块和 7.2V电池电源;所述的集成电路板包括主控芯片6、隔离CAN模块芯片2、电机和舵机稳压芯片4、电机驱动芯片1,所述的集成电路板用于执行自行车速度自动控制的算法;所述的电池电源通过稳压电源芯片9为主控芯片6供电,电池电源通过电机和舵机稳压芯片4分别为直流电机14和舵机供电,所述的电机驱动芯片1用于驱动直流电机14,所述隔离CAN模块芯片2用于与其他控制芯片进行CAN 通信。
所述的主控芯片6采用STM32F407ZET6,所述的电机驱动芯片 1采用IRLR7843TRBF,所述的直流电机14和舵机稳压芯片4采用 LM2941,所述集成电路板还包括舵机接口10、电机接口3、传感器接口8、电池电源接口5,所述的舵机接口10用于与舵机相连,所述的电机接口3与直流电机14相连,所述传感器接口8分别与超声波传感器模块和霍尔式传感器模块相连,所述的电源接口5与7.2V电池电源相连,所述集成电路板还包括电源开关组件7,分别实现对舵机、直流电机14以及主控芯片6电源通断电的控制,所述的稳压电源芯片9用于将7.2V电池电源稳压成3.3V给主控芯片6供电,所述集成电路板上还设有外接接口11,用于与其他控制芯片通过隔离 CAN模块芯片2进行CAN通信,方便后续对本实用新型的功能进行扩展。
所述的超声波模块通过超声波支架与舵机输出轴相连,舵机用于驱动超声波传感器的探头来回往复摆动,所述的舵机通过舵机支架安装在自行车的前部位置,超声波传感器通过传感器接口8与集成电路板相连,所述的超声波传感器模块用于采集自行车前方障碍物的距离信息,实现自行车对前方障碍物的感知。所述的霍尔传感器模块通过安装支架安装在自行车后部位置,霍尔传感器通过传感器接口8与集成电路板相连,所述的霍尔传感器模块用于采集自行车后轮的实时速度以及加速度信息。
如图2所示,直流电机14的输出轴与套筒12的中心孔进行连接,刹车线穿过套筒12上的套筒孔13,从而可以实现直流电机14的输出轴的转动带动套筒12转动,进而使刹车线的张紧,实现对自行车行驶速度的控制。
如图3所示,所述主控芯片6得到传感器模块的传感器数据之后,对数据进行一定的滤波处理之后计算出自行车路面上障碍物的距离信息,再根据霍尔传感器采集回来的车速以及加速度信息,进行整车行驶状态的安全性进行判断,如果障碍物的距离小于安全距离,控制装置发出指令控制直流电机14转动,使刹车线张紧状态,自行车减速,如果速度以及加速度小于设定的车速阈值,直流电机14停止转动,并回到初始位置,这时刹车线处于松弛状态。如果障碍物的距离大于安全距离或无障碍物,直流电机14处于初始位置,刹车线处于松弛状态。根据超生波传感器采集的障碍物的距离信息和霍尔传感器采集到的车速信息作为判断的依据,集成电路板作出判断,并发出指令控制直流电机14转动,从而达到对自行车行驶速度自动控制的目的,以利于自行车的安全行驶。
当然,以上仅为本实用新型较佳实施方式,并非以此限定本实用新型的使用范围,故,凡是在本实用新型原理上做等效改变均应包含在本实用新型的保护范围内。
一种自行车自动控速的控制装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0