

IPC分类号 : B63B23/00,H04N7/18,G08C17/02,G05B19/042









专利摘要
本发明公开了一种基于遥控器的无人艇自动布放回收控制系统及方法。包括遥控器、单片机控制系统、控制机械装置三部分,可实现无人艇在4级海况下安全、可靠地布放回收。本发明使用遥控器作为手持控制端,通过无线传输数据,在船上控制箱中的无线接收器接收并解析数据。进而控制各个电机和电推杆等执行机构实现无人艇的自动布放回收。本发明所提出无人艇布放回收的控制系统操作方便,能够有效的通过摄像头实现平静海面以及有海浪干扰等情况下的布放回收操作。
权利要求
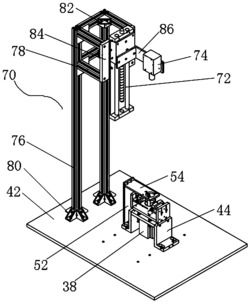
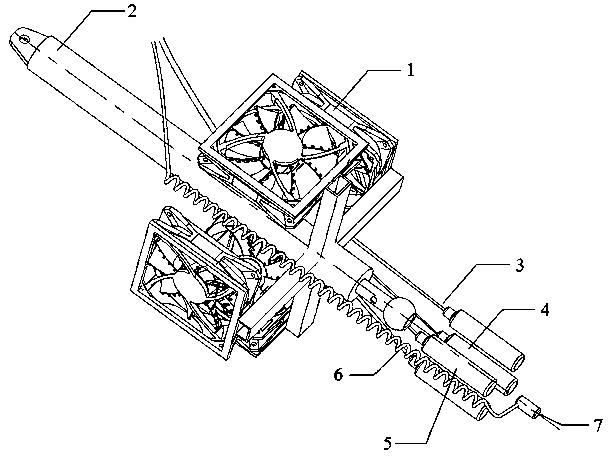
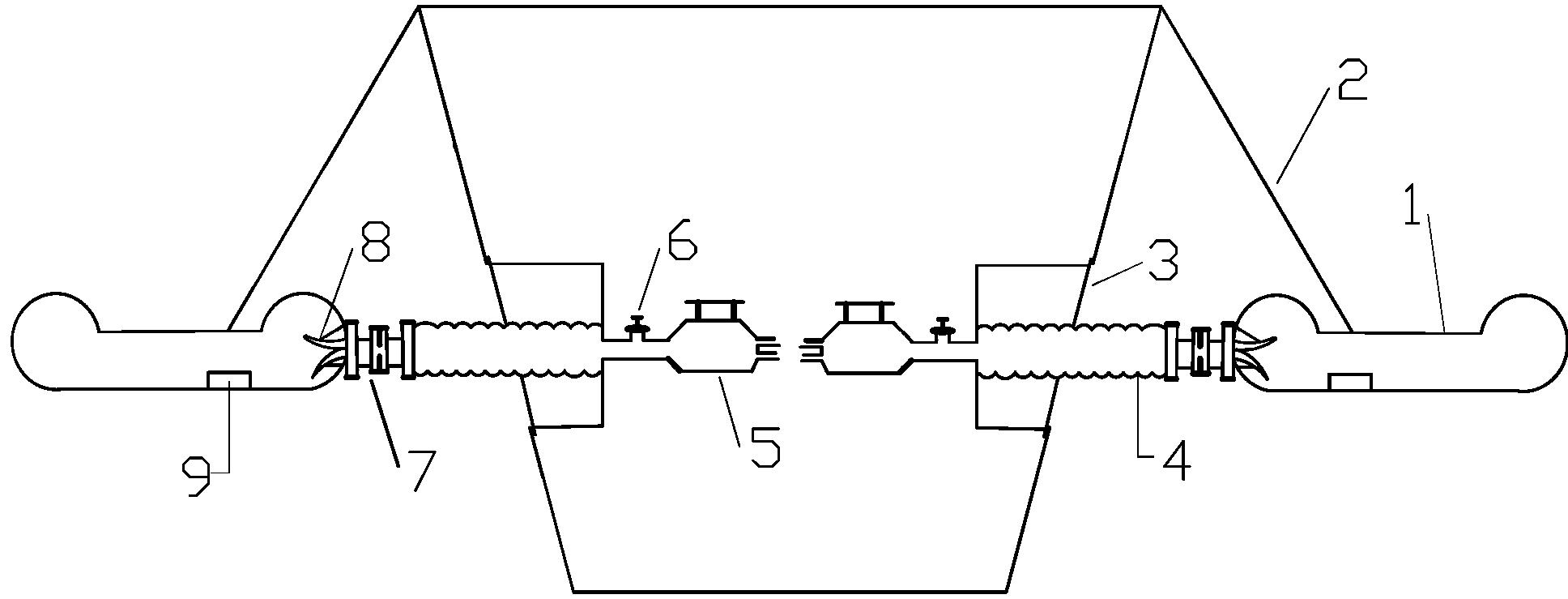
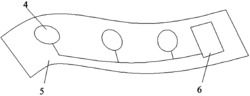
1.一种基于遥控器的无人艇布放回收控制系统,包括遥控器(7)、单片机(5)和控制机械装置(14),其特征在于:所述单片机(5)与一个摄像头(1)、一个激光传感器(2)、一个接近开关(3)、一个上层控制单元(4)、两个电推杆(8、9)、一个云台上下转动电机(10)、一个云台左右转动电机(12)、一个控制引线弹射的弹射电机(13)、一个云台上下转动电机的编码器(11)相连,并通过一个遥控器接收机(6)与遥控器(7)无线连接,所述的云台上下转动的电机(10)和云台左右转动的电机(12)与控制机械装置(14)连接从而操纵无人艇(15)布放回收过程;所述控制机械装置(14)包括安放在无人艇(15)上的云台(15-3)、弹射机构(15-2)和对接机构(15-1),所述云台(15-3)由云台上下转动电机(10)和云台左右转动电机(12)驱动转动,从而联动弹射机构(15-2)转动;所述弹射机构(15-2)包括弹射电机(13)、卡扣(15-2-2)和橡皮筋弹弓(15-2-1),弹射电机(13)转动会使卡扣(15-2-2)松开,橡皮筋弹弓(15-2-1)发射完成抛射;所述对接机构(15-1)包括吊钩放置仓(15-1-1)、电推杆1(8)和电推杆2(9),所述对接机构(15-1)将放下来的吊钩滑向吊钩放置仓(15-1-1)内,通过两个电推杆(8、9)伸出将吊钩固定在仓内无法拿出,使得无人艇(15)与吊钩固定连接。
2.根据权利要求1所述的基于遥控器的无人艇布放回收控制系统,其特征在于,所述遥控器(7)包括一个摄像头开关按钮(7-1)、一个电推杆伸缩按钮(7-2)、一个弹射电机按钮(7-5)、一个左右摇杆(7-3)、一个上下摇杆(7-6)和一个显示屏(7-4),所述的摄像头开关按钮(7-1)可在需要的时候打开摄像头,所述的电推杆伸缩按钮(7-2)可通过电推杆的伸出缩回控制吊钩是否与无人艇锁死,所述的弹射电机按钮(7-5)可控制弹射装置启动,从而将引线弹至母船,所述的左右摇杆(7-3)和上下摇杆(7-6)分别控制云台的左右转动和上下俯仰,所述的显示屏(7-4)可显示无人艇上的摄像头(1)传回来的视频信息。
3.根据权利要求1所述的基于遥控器的无人艇布放回收控制系统,所述的激光传感器(2)用于测距,在无人艇(15)放入水中之后,可实时的检测无人艇(15)与母船的距离,当检测到无人艇(15)与母船的距离小于10米时,单片机(5)会向上层控制单元(4)发送信息此时处于危险距离并报警,开启无人艇(15)油门使无人艇(15)逐渐远离母船。
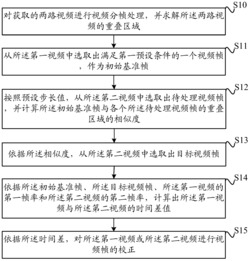
4.一种基于遥控器的无人艇布放控制方法,采用根据权利要求1所述的基于遥控器的无人艇布放回收控制系统进行操作,其特征在于操作步骤如下:
S01,将吊钩放入对接机构中;
S02,启动遥控器(7),按下遥控器上电推杆伸缩按钮使得电推杆伸出,进而将吊钩与无人艇(15)固连在一起;
S03,启动吊机将无人艇吊放到水中合适位置后,按下遥控器(7)上电推杆伸缩按钮(7-2)使得电推杆收回,将吊钩释放,完成无人艇(15)布放操作。
5.一种基于遥控器的无人艇回收控制方法,采用根据权利要求1所述的基于遥控器的无人艇布放回收控制系统进行操作,其特征在于操作步骤如下:
S01,无人艇完成作业返回至母船旁边,按下遥控器(7)上摄像头开关按钮(7-1)打开摄像头,显示此时发射装置对准的方位;
S02,拨动遥控器(7)上左右摇杆(7-3)和上下摇杆(7-6)调整云台的实时位置,通过摄像头(1)传回来的视频信息观察对准母船的时刻;
S03,对准母船后,按下遥控器上的弹射电机按钮(7-5),将弹射装置以及引线从无人艇发射至母船上,建立无人艇与母船的连接;
S04,将吊钩沿着引线从母船滑向对接机构中,直到接近开关(3)检测到吊钩到达指定位置,按下遥控器上电推杆伸缩按钮(7-2)使得电推杆伸出,将无人艇与吊钩固连在一起;
S05,启动吊机将无人艇吊放到至母船,按下遥控器(7)上电推杆伸缩按钮(7-2)使得电推杆收回,将吊钩释放,完成无人艇回收操作。
说明书
技术领域
本发明涉及无人水面艇自动控制技术领域,尤其是指基于遥控器的无人艇布放回收控制系统及方法。
背景技术
进入21世纪以来,随着人们对海洋资源的重视,其开发力度不断加大,并不断向深海、远海延伸,从而使无人艇技术得到了飞速发展。目前,在军事、海洋科考、海底勘探等领域,无人艇已得到广泛应用。但无人艇的自动高效布放回收一直是一个难题,特别是当海上风浪大,环境恶劣时,无人艇的自动布放回收变得更加困难,人为的将吊钩放在合适的位置不仅会非常困难而且在海面上会受到生命安全的威胁,所以实现一个好的自动布放回收控制系统可以为无人艇的安全吊放提供保障。
发明内容
本发明的目的在于,针对目前布放回收还需要大量的人工操作并且将会面临风险的前提下,提供了一种基于遥控器的无人艇布放回收控制系统及方法,通过此发明,操作者只需要站在母船上完成简单的遥控器操作即可实现无人艇的布放回收过程,为达到上述目的,本发明的构思如下:
为了使得仅使用遥控器就可以达到无人艇布放回收操作的目的,考虑使用一个弹射装置将一根引线从无人艇抛射至母船上,然后将用于起吊无人艇的吊钩从母船上顺着引线滑向无人艇。上述的弹射装置在弹射的时候需要寻找合适的角度从而使得引线成功发射至母船上,所以弹射装置被安放在一个云台上,所述的云台由一台电机控制左右转动,一台电机控制俯仰转动。上述的弹射装置使用一个弹射电机控制,当电机转动,弹弓就会被释放从而将引线抛出。
根据上述构思,本发明采用下述技术方案:
一、组成
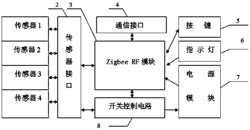
整个无人艇的布放回收控制系统共包含以下三个模块:(1)遥控器:人为主动控制执行机构的动作;(2)单片机控制系统:控制系统的中心所在,内含单片机MCU处理遥控器传来的信息并进行解析后对各种执行机构进行控制;(3)控制机械装置:与电机和电推杆相连,通过电机和电推杆的运动来执行动作。
所述单片机与一个摄像头、一个激光传感器、一个接近开关、一个上层控制单元、两个电推杆、一个云台上下转动的电机、一个云台左右转动的电机、一个控制引线弹射的电机、一个云台上下转动电机的编码器相连,并通过一个遥控器接收机与遥控器无线连接,所述的云台上下转动的电机和云台左右转动的电机与控制机械装置连接从而操纵无人艇布放回收过程。
所述的摄像头可以将弹射装置对准的方向的图像信息传送到母船操作人员遥控器上,从而判断此时是否是发射引线的合适角度,保证成功率。所述的激光测距传感器可以实时的检测无人艇与母船的距离,当检测到无人艇与母船的距离小于10米时,单片机会通过RS232串口线告诉上层控制单元此时处于危险距离并报警,开启油门使无人艇逐渐远离母船。所述的接近开关可以检测到从母船上顺着引线放下来的吊钩是否到达指定位置,到达指定位置后可以将电推杆伸出从而使吊钩与无人艇固连在一起。所述的上层控制单元可以将激光测距传感器的信息传输到上层控制系统内,从而判断是否需要调整无人艇位置使得无人艇与母船不会发生碰撞。所述的两个电推杆伸出可将从母船放下来的吊钩与无人艇固联在一起,缩回可将吊钩从无人艇上释放。所述的云台上下转动电机可以控制云台上下转动,带动弹射装置俯仰运动;所述的云台左右转动电机可以控制云台左右转动;所述控制引线弹射的电机,电机转动弹弓就会被释放从而将引线抛出。所述云台上下转动电机的编码器,可以检测云台的俯仰角度,控制其俯仰角度在一定的范围内。所述的遥控器接收机可以接受遥控器发出的指令,单片机通过对指令进行解析从而进行各种操作。
所述的遥控器,按钮布局如图所示,可以通过该遥控器对布放回收装置进行远程操作。所述遥控器包括一个摄像头开关按钮、一个电推杆伸缩按钮、一个弹射电机按钮、一个左右摇杆、一个上下摇杆、一个显示屏。所述的摄像头开关按钮可以在需要的时候打开摄像头,所述的电推杆伸缩按钮可以通过电推杆的伸出缩回控制吊钩是否与无人艇锁死,所述的弹射电机按钮可以控制弹射装置启动,从而将引线弹至母船,所述的左右摇杆和上下摇杆分别控制云台的左右转动和上下俯仰,所述的显示屏可以显示船上的摄像头传回来的视频信息。
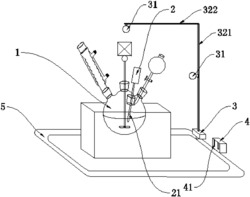
所述的控制机械装置,包括图3所示的安装在无人艇上云台、弹射机构以及对接机构。所述云台由云台上下转动电机和云台左右转动电机驱动旋转,从而带动整个弹射机构旋转。所述弹射机构由弹射电机和卡扣组成,弹射电机转动会使卡扣松开,橡皮筋弹弓发射完成抛射。所述对接机构将母船放下来的吊钩滑向吊钩放置仓内,通过电推杆伸出将吊钩固定在仓内无法拿出,使得与无人艇锁死。
二、操作步骤
2.1 无人艇布放过程
一种基于遥控器的无人艇布放控制方法,基于上述组成装置,其特征在于操作步骤如下:
S01,将吊钩放入对接机构中;
S02,启动遥控器,按下遥控器上电推杆伸缩按钮使得电推杆伸出,进而将吊钩与无人艇固连在一起。
S03,启动吊机将无人艇吊放到水中合适位置后,按下遥控器上电推杆伸缩按钮使得电推杆收回,将吊钩释放,完成无人艇布放操作。
2.2 无人艇回收过程
一种基于遥控器的无人艇回收控制方法,基于上述组成装置,其特征在于操作步骤如下:
S01,无人艇完成作业返回至母船旁边,按下遥控器上摄像头开关按钮打开摄像头,显示此时发射装置对准的方位。
S02,拨动遥控器上左右摇杆和上下摇杆调整云台的实时位置,通过摄像头传回来的视频信息观察对准母船的时刻。
S03,对准母船后,按下遥控器上的弹射电机按钮,将弹射装置以及引线从无人艇发射至母船上,建立无人艇与母船的连接。
S04,将吊钩沿着引线从母船滑向对接机构中,直到接近开关检测到吊钩到达指定位置,按下遥控器上电推杆伸出按钮使得电推杆伸出,将无人艇与吊钩固连在一起。
S05,启动吊机将无人艇吊放到至母船,按下遥控器上电推杆伸缩按钮使得电推杆收回,将吊钩释放,完成无人艇回收操作
本发明与现有技术相比较,具有操作简单,可以实现仅通过操作遥控器即可实现自动布放回收的操作,极大地简化了布放回收的操作步骤,不需要操作人员面临危险。而且此方法能够有效的防止海浪的干扰,操作过程稳定,成功率高。
附图说明
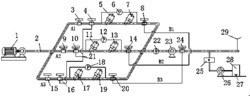
图1 整体控制方式示意图。
图2 遥控器按钮布局示意图。
图3 布放回收系统整体结构图。
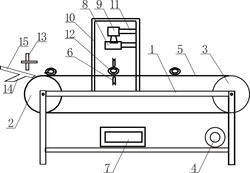
图4 云台结构图。
图5 弹射机构结构图。
图6 对接机构结构图。
图7 布放阶段执行流程图。
图8 回收阶段执行流程图。
具体实施方式
下面对本发明的优选实施例作进一步详细的说明。
实施例一:参见图1~图6,本基于遥控器的无人艇布放回收控制系统,包括遥控器(7)、单片机(5)和控制机械装置(14),其特征在于:所述单片机(5)与一个摄像头(1)、一个激光传感器(2)、一个接近开关(3)、一个上层控制单元(4)、两个电推杆(8、9)、一个云台上下转动电机(10)、一个云台左右转动电机(12)、一个控制引线弹射的电机(13)、一个云台上下转动电机的编码器(11)相连,并通过一个遥控器接收机(6)与遥控器(7)无线连接,所述的云台上下转动的电机(10)和云台左右转动的电机(12)与控制机械装置(14)连接从而操纵无人艇(15)布放回收过程。
实施例二:本实施例与实施例一基本相同,其特征在于,所述遥控器(7)包括一个摄像头开关按钮(7-1)、一个电推杆伸缩按钮(7-2)、一个弹射电机按钮(7-5)、一个左右摇杆(7-3)、一个上下摇杆(7-6)和一个显示屏(7-4)。所述的摄像头开关按钮(7-1)可在需要的时候打开摄像头,所述的电推杆伸缩按钮(7-2)可通过电推杆的伸出缩回控制吊钩是否与无人艇锁死,所述的弹射电机按钮(7-5)可控制弹射装置启动,从而将引线弹至母船,所述的左右摇杆(7-3)和上下摇杆分别控制云台的左右转动和上下俯仰,所述的显示屏(7-4)可显示无人艇上的摄像头传回来的视频信息。
实施例三:基于遥控器的无人艇布放回收控制方法工作过程如下:
1.布放过程
S01当无人艇在母船上的时候,启动控制箱电源并打开遥控器,建立遥控器与单片机的连接。
S02 首先将吊钩放入对接机构中,吊钩碰到接进开关,接近开关开启触发高电平,单片机检测到这一个高电平信号后,控制电推杆1和电推杆2启动伸出,锁死吊钩。
S03 此时开始起吊,慢慢将无人艇放入水中,按下遥控器上的电推杆伸缩按钮,此时单片机接收到遥控器传来的固定频率的PWM波,解析得到PWM波的占空比,进而判断出此时需要做出的相应的动作,电推杆1和电推杆2启动收回,释放吊钩。至此布放过程实施完毕。
2.回收过程
S01 当无人艇靠近母船,准备开始实施回收过程。首先按下遥控器上摄像头开关按钮打开摄像头。
S02 摄像头打开后,摄像头的视频通过无线传输到遥控器上,人在母船上通过遥控器显示屏上观察此时弹射装置对应的弹射方向。
S03 拨动左右摇杆,遥控器将左右摇杆的信号传递给单片机,单片机识别到之后控制云台左右电机正转或反转,进而调整云台机构左右移动,直到左右位置合适之后开始调节上下位置;
S04 拨动302上下摇杆,遥控器将上下摇杆的信号传递给单片机,单片机识别到之后控制202云台上下电机正转或反转,进而调整云台机构上下移动,与此同时,单片机还会一直接收云台上下电机编码器传回来的信息,当发现上下电机移动的幅度超过限位之后,关闭云台上下电机,使其在极限位置停止不再运动,然后再通过遥控器使其朝反方向运动。直到通过显示屏观察到弹射机构已经对准了母船。
S05 此时按下遥控器上的弹射电机按钮,遥控器将弹射电机的信号传递给单片机,单片机识别到之后控制弹射电机正转或反转,弹弓就会被释放从而将引线抛出。
S06 母船接收到引线后,将吊钩沿着引线放下来,当吊钩滑到对接机构中碰到接进开关,当单片机检测到这一接近开关信号后,启动电推杆1和电推杆2伸出,锁死吊钩。将无人艇与吊钩固连在一起。
S07 开始起吊。慢慢将无人艇吊放至母船,按下遥控器上的电推杆伸缩按钮,电推杆1和电推杆2启动收回,释放吊钩。至此回收过程实施完毕。
于此同时,在整个回收过程中,激光传感器一直在检测无人艇与母船的距离,当无人艇与母船的距离小于10m时,单片机会通过RS232串口线告诉上层控制单元此时处于危险距离,开启油门使无人艇逐渐远离母船。
一种基于遥控器的无人艇布放回收控制系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0