








专利摘要
一种小型舰船的稳定平台,属于稳定平台领域,本实用新型一种稳定精度高、扰动抑制能力强的小型舰船的稳定平台。本实用新型中,双轴稳定平台控制装置用于控制平台保持稳定;驱动控制系统用于输出控制指令从而驱动双轴稳定平台控制装置;三环路伺服控制系统用于接收双轴稳定平台控制装置的反馈信息,并将反馈信息传输至驱动控制系统;控制器与上位机双向连接,控制器的输入端与传感器的输出端连接,伺服驱动器的输入端与控制器的输出端连接,伺服驱动器的输出端与伺服电机的输入端连接,增量式编码器的输入端与伺服电机的输出端连接,增量式编码器的输出端与控制器的输入端连接。本实用新型主要用于保持舰船平台的稳定。
权利要求
1.一种小型舰船的稳定平台,其特征在于,它包括:
双轴稳定平台控制装置,用于控制平台保持稳定;
驱动控制系统,用于输出控制指令从而驱动双轴稳定平台控制装置;
三环路伺服控制系统,用于接收双轴稳定平台控制装置的反馈信息,并将反馈信息传输至驱动控制系统;
所述双轴稳定平台控制装置的输入端与驱动控制系统的输出端连接,所述驱动控制系统与三环路伺服控制系统双向连接,所述双轴稳定平台控制装置输出反馈信号至三环路伺服控制系统;
所述驱动控制系统包括控制器、上位机、传感器、伺服电机、伺服驱动器和增量式编码器,所述控制器与上位机双向连接,所述控制器的输入端与传感器的输出端连接,所述伺服驱动器的输入端与控制器的输出端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述增量式编码器的输入端与伺服电机的输出端连接,所述增量式编码器的输出端与控制器的输入端连接。
2.根据权利要求1所述的一种小型舰船的稳定平台,其特征在于,所述控制器包括电源电路、复位晶振电路、光耦电路、调试电路、信号调理电路、串口通讯接口电路和STM32处理器,所述电源电路的输入端与外部供电连接,所述电源电路、复位晶振电路、光耦电路、调试电路、信号调理电路和串口通讯接口电路均与STM32处理器双向连接,所述光耦电路的输出端与伺服驱动器的输入端连接,所述增量式编码器的输出端与STM32处理器的输入端连接,所述传感器的输出端与信号调理电路的输入端连接,所述串口通讯接口电路与上位机双向连接。
3.根据权利要求1所述的一种小型舰船的稳定平台,其特征在于,所述双轴稳定平台控制装置包括翻滚轴、俯仰轴和多个惯性传感器;所述多个惯性传感器分别固定在翻滚轴和俯仰轴上,所述多个惯性传感器的输出端与控制器连接,所述翻滚轴和俯仰轴的输入端均与驱动控制系统的输出端连接。
4.根据权利要求1所述的一种小型舰船的稳定平台,其特征在于,所述三环路伺服控制系统包括位置环、速度环和电流环。
5.根据权利要求4所述的一种小型舰船的稳定平台,其特征在于,所述位置环包括ARM控制器、伺服驱动器、伺服电机、位置控制器和双轴稳定平台控制装置,所述ARM控制器的输出端与伺服驱动器的输入端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述伺服电机的输出端与双轴稳定平台控制装置的输入端连接,所述位置控制器的输入端与双轴稳定平台控制装置的输出端连接,所述位置控制器的输出端与ARM控制器的输入端连接,从而形成位置环。
6.根据权利要求4所述的一种小型舰船的稳定平台,其特征在于,所述位置环包括ARM控制器、伺服驱动器、伺服电机、角速度传感器和双轴稳定平台控制装置,所述ARM控制器的输出端与伺服驱动器的输入端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述伺服电机的输出端与双轴稳定平台控制装置的输入端连接,所述角速度传感器的输入端与双轴稳定平台控制装置的输出端连接,所述角速度传感器的输出端与ARM控制器的输入端连接,从而形成位置环。
7.根据权利要求4所述的一种小型舰船的稳定平台,其特征在于,所述电流环包括伺服驱动器和伺服电机,所述伺服驱动器包括电流调节器、功率放大器和电流感应器,所述电流调节器的输入端与ARM控制器的输出端连接,所述电流调节器的输出端与功率放大器的输入端连接,所述功率放大器的输出端与伺服电机的输入端连接,所述电流感应器的输入端与伺服电机连接,所述电流感应器的输出端与电流调节器的输入端连接,从而形成电流环。
说明书
技术领域
本实用新型属于稳定平台领域,具体涉及一种小型舰船的稳定平台。
背景技术
当船体受到海浪冲击会造成船体相对于地理坐标系产生一定的扰动角度,舰船的稳定平台在面对很大的震动时控制精度很难达到高精度,虽然目前存在一些舰船的稳定平台,但目前的稳定平台的精度偏低,而稳定平台精度的影响因素主要来自于硬件结构和控制系统,其中,硬件结构的影响因素包括载体的扰动、机械结构的谐振、安装不平衡、线路复杂和传感器噪声,譬如舰载条件下主要是由于海浪造成的低频率大幅度扰动和低频时换向带来的换向摩擦。五级海况时的扰动主要能量集中在0.1~0.2Hz,幅值20°左右;换向带来的摩擦影响会在仪器换向时出现尖峰误差。机载条件下的扰动频率要高一些,主要几集中在几赫兹到一百赫兹。星载条件下包括大气干扰带来的宽带干扰和平台带来的窄带干扰,大气干扰一般宽达几百赫兹甚至上千赫兹,但是幅值比较小。虽然不同载体扰动条件不同,但是大多数载体的扰动主要集中在1~100Hz,尤其是5~20Hz的频率范围内。所以要求惯性稳定平台在中低频具有足够高的抑制能力。控制系统的影响因素包括相位延迟、闭环误差、补偿无针对性等。所以目前在舰船用高精度稳定平台的研制方面仍需努力。
因此,就需要一种稳定精度高、扰动抑制能力强的小型舰船的稳定平台。
实用新型内容
本实用新型针对现有稳定平台精度低、扰动抑制能力差的缺陷,提供了一种稳定精度高、扰动抑制能力强的小型舰船的稳定平台。
本实用新型所涉及的一种小型舰船的稳定平台的技术方案如下:
本实用新型所涉及的一种小型舰船的稳定平台,双轴稳定平台控制装置,用于控制平台保持稳定;
驱动控制系统,用于输出控制指令从而驱动双轴稳定平台控制装置;
三环路伺服控制系统,用于接收双轴稳定平台控制装置的反馈信息,并将反馈信息传输至驱动控制系统;
所述双轴稳定平台控制装置的输入端与驱动控制系统的输出端连接,所述驱动控制系统与三环路伺服控制系统双向连接,所述双轴稳定平台控制装置输出反馈信号至三环路伺服控制系统;
所述驱动控制系统包括控制器、上位机、传感器、伺服电机、伺服驱动器和增量式编码器,所述控制器与上位机双向连接,所述控制器的输入端与传感器的输出端连接,所述伺服驱动器的输入端与控制器的输出端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述增量式编码器的输入端与伺服电机的输出端连接,所述增量式编码器的输出端与控制器的输入端连接。
进一步地:所述控制器包括电源电路、复位晶振电路、光耦电路、调试电路、信号调理电路、串口通讯接口电路和STM32处理器,所述电源电路的输入端与外部供电连接,所述电源电路、复位晶振电路、光耦电路、调试电路、信号调理电路和串口通讯接口电路均与STM32处理器双向连接,所述光耦电路的输出端与伺服驱动器的输入端连接,所述增量式编码器的输出端与STM32处理器的输入端连接,所述传感器的输出端与信号调理电路的输入端连接,所述串口通讯接口电路与上位机双向连接。
进一步地:所述双轴稳定平台控制装置包括翻滚轴、俯仰轴和多个惯性传感器;所述多个惯性传感器分别固定在翻滚轴和俯仰轴上,所述多个惯性传感器的输出端与控制器连接,所述翻滚轴和俯仰轴的输入端均与驱动控制系统的输出端连接。
进一步地:所述三环路伺服控制系统包括位置环、速度环和电流环。
进一步地:所述位置环包括ARM控制器、伺服驱动器、伺服电机、位置控制器和双轴稳定平台控制装置,所述ARM控制器的输出端与伺服驱动器的输入端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述伺服电机的输出端与双轴稳定平台控制装置的输入端连接,所述位置控制器的输入端与双轴稳定平台控制装置的输出端连接,所述位置控制器的输出端与ARM控制器的输入端连接,从而形成位置环。
进一步地:所述位置环包括ARM控制器、伺服驱动器、伺服电机、角速度传感器和双轴稳定平台控制装置,所述ARM控制器的输出端与伺服驱动器的输入端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述伺服电机的输出端与双轴稳定平台控制装置的输入端连接,所述角速度传感器的输入端与双轴稳定平台控制装置的输出端连接,所述角速度传感器的输出端与ARM控制器的输入端连接,从而形成位置环。
进一步地:所述电流环包括伺服驱动器和伺服电机,所述伺服驱动器包括电流调节器、功率放大器和电流感应器,所述电流调节器的输入端与ARM控制器的输出端连接,所述电流调节器的输出端与功率放大器的输入端连接,所述功率放大器的输出端与伺服电机的输入端连接,所述电流感应器的输入端与伺服电机连接,所述电流感应器的输出端与电流调节器的输入端连接,从而形成电流环。
本实用新型所涉及的一种小型舰船的稳定平台的有益效果是:
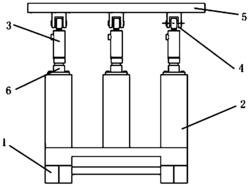
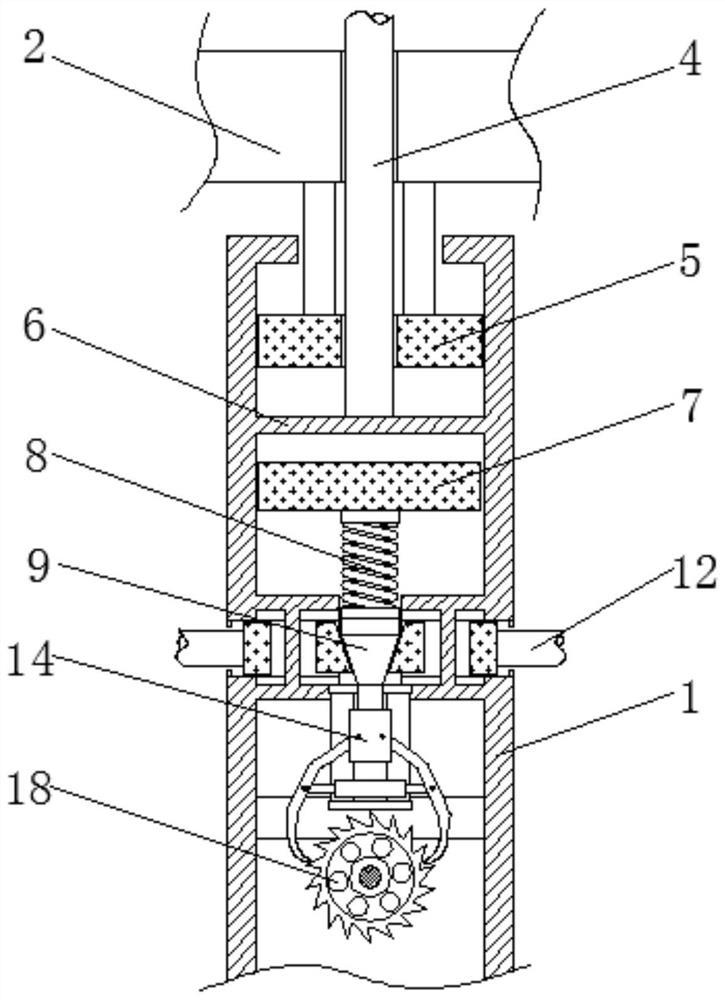
本实用新型所涉及的一种小型舰船的稳定平台,当船体受到海浪冲击会造成船体相对于地理坐标系产生一定的扰动角度,稳定平台会控制平台台面反方向转动,实现稳定平台台面相对于地理坐标系稳定。建立直流力矩电机模型,建立三闭环伺服控制系统模型,分别设计电流环、速度环和位置环控制器。其中电流环作为系统最内环,速度环为控制系统中间环节,位置环为系统的最外环。电流环主要控制电机机械运动,跟随给定的电压信号,消除电机运转产生的反电动势对输出力矩的影响;速度环主要用于抑制电机转动角度及角加速度对电机运行时所产生的波动影响,平衡环内比例增益和积分时间常数的矛盾;位置环作为系统的核心环节,实现对载体位置指令的实时跟踪及控制平台做出相应的补偿运动,以保证平台稳定精度和动态特性。实现稳定平台硬件设计。搭建稳定平台的机械结构和设计以STM32为控制器的硬件电路。在核心控制板上,主要包括微处理器STM32的最小系统电路、电源电路、调试电路、串口通讯接口电路、信号调理电路,而伺服电机及其驱动器和平台姿态变化传感器采用单独设计,独立安装。
附图说明
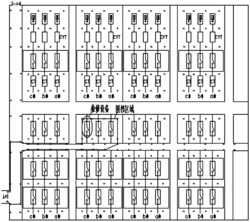
图1为一种小型舰船的稳定平台的总体硬件电路规划图;
图2为三环路伺服控制系统的闭环结构示意图;
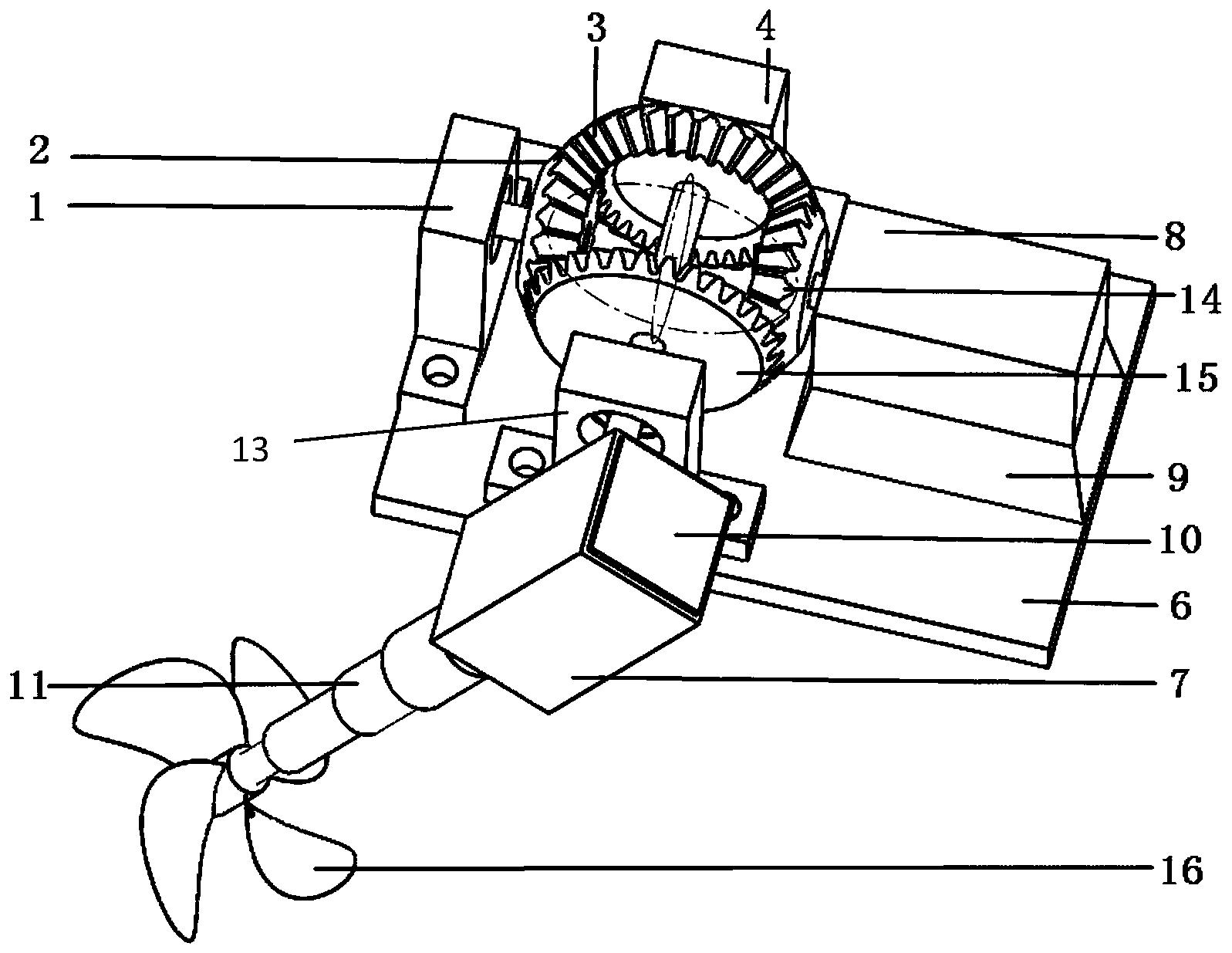
图3为实施例4所述位置环的结构示意图。
具体实施方式
下面结合实施例对本实用新型的技术方案做进一步的说明,但并不局限于此,凡是对本实用新型技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的保护范围中。
实施例1
结合图1、图2和图3说明本实施例,在本实施例中,本实施例所涉及的一种小型舰船的稳定平台,它包括:
双轴稳定平台控制装置,用于控制平台保持稳定;
驱动控制系统,用于输出控制指令从而驱动双轴稳定平台控制装置;
三环路伺服控制系统,用于接收双轴稳定平台控制装置的反馈信息,并将反馈信息传输至驱动控制系统;
所述双轴稳定平台控制装置的输入端与驱动控制系统的输出端连接,所述驱动控制系统与三环路伺服控制系统双向连接,所述双轴稳定平台控制装置输出反馈信号至三环路伺服控制系统;
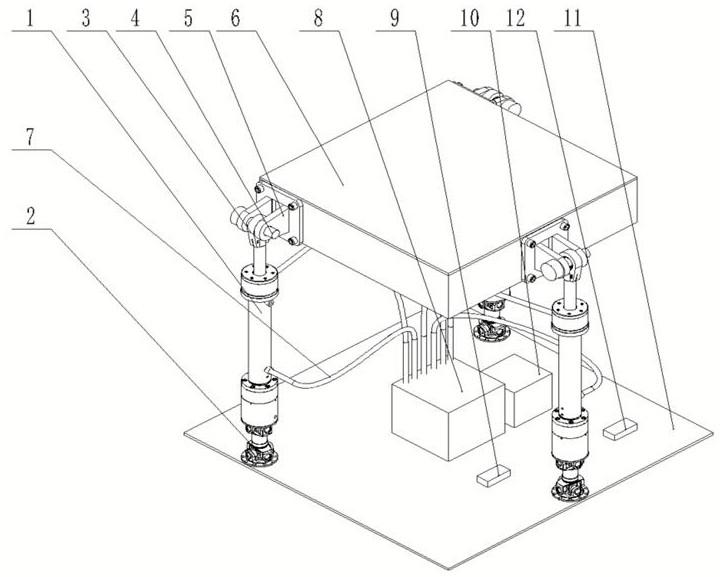
所述驱动控制系统包括控制器、上位机、传感器、伺服电机、伺服驱动器和增量式编码器,所述控制器与上位机双向连接,所述控制器的输入端与传感器的输出端连接,所述伺服驱动器的输入端与控制器的输出端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述增量式编码器的输入端与伺服电机的输出端连接,所述增量式编码器的输出端与控制器的输入端连接。如此设置的目的是:充分考虑系统电磁兼容性,采取屏蔽和隔离、滤波等措施,减少电磁干扰对控制系统的影响。为了保证系统能够较为稳定运行,确保平台姿态变化传感器对于平台的振荡、摇晃等扰动能第一时间捕获到,所以将传感器电路和主控板分开,安装在稳定平台上,通过有线的方式和安装在基座上的微处理器主控板连接。同时伺服驱动器使得弱电控制和伺服电机的强电驱动分开。通过三环路伺服控制系统接收稳定平台上设置的传感器的反馈信号,与驱动控制系统形成回路,进而通过双轴稳定平台控制装置实现实时控制稳定平台的稳定。
实施例2
结合实施例1说明本实施例,在本实施例中,本实施例所涉及的一种小型舰船的稳定平台,所述控制器包括电源电路、复位晶振电路、光耦电路、调试电路、信号调理电路、串口通讯接口电路和STM32处理器,所述电源电路的输入端与外部供电连接,所述电源电路、复位晶振电路、光耦电路、调试电路、信号调理电路和串口通讯接口电路均与STM32 处理器双向连接,所述光耦电路的输出端与伺服驱动器的输入端连接,所述增量式编码器的输出端与STM32处理器的输入端连接,所述传感器的输出端与信号调理电路的输入端连接,所述串口通讯接口电路与上位机双向连接。如此设置的目的是:控制器能够在极短的时间内完成复杂的伺服运算,同时控制器具有浮点运算功能,选用STM32作为主控核心。该微控制器支持程序执行和数据传输并行处理,数据传输速率非常快,高速SPI,计算能力强,集成的大量的外围设备功能以及较低的功耗,为电机及其他运动控制领域的应用实现提供了良好的平台,也使其非常适用于水面稳定平台控制系统。在核心控制板上,主要包括微处理器STM32的最小系统电路、电源电路、调试电路、串口通讯接口电路、信号调理电路以及高速光藕电路,而增量编码器、伺服电机、伺服驱动器和增量式编码器采用单独设计,独立安装。传感器利用MEMS陀螺仪和加速度计完成数据采集电路的设计,直流力矩电机驱动稳定平台转动。
实施例3
结合实施例1和实施例2说明本实施例,在本实施例中,本实施例所涉及的一种小型舰船的稳定平台,所述双轴稳定平台控制装置包括翻滚轴、俯仰轴和多个惯性传感器;所述多个惯性传感器分别固定在翻滚轴和俯仰轴上,所述多个惯性传感器的输出端与控制器连接,所述翻滚轴和俯仰轴的输入端均与驱动控制系统的输出端连接。如此设置的目的是:实现不同坐标系之间的转换。采用双轴稳定平台控制装置,包括翻滚轴和俯仰轴。首先从坐标系角度对两轴稳定平台进行分析。假定在初始情况下,海平面静止,船体无摇摆,平台稳定,此时地理坐标系、船体坐标系与平台台面坐标系应该互相重合。然而,当船体受到海浪冲击时,船体会发生摇摆运动,此时船体坐标系和地理坐标系就会不一致,两者之间会发生一定的角度变化。惯性传感器是按照地理坐标系来工作的,实现船载姿态的补偿即实现平台台面相对地理坐标系的稳定。
实施例4
结合实施例1说明本实施例,在本实施例中,本实施例所涉及的一种小型舰船的稳定平台,所述三环路伺服控制系统包括位置环、速度环和电流环。所述位置环包括ARM控制器、伺服驱动器、伺服电机、位置控制器和双轴稳定平台控制装置,所述ARM控制器的输出端与伺服驱动器的输入端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述伺服电机的输出端与双轴稳定平台控制装置的输入端连接,所述位置控制器的输入端与双轴稳定平台控制装置的输出端连接,所述位置控制器的输出端与ARM控制器的输入端连接,从而形成位置环。所述位置环包括ARM控制器、伺服驱动器、伺服电机、角速度传感器和双轴稳定平台控制装置,所述ARM控制器的输出端与伺服驱动器的输入端连接,所述伺服驱动器的输出端与伺服电机的输入端连接,所述伺服电机的输出端与双轴稳定平台控制装置的输入端连接,所述角速度传感器的输入端与双轴稳定平台控制装置的输出端连接,所述角速度传感器的输出端与ARM控制器的输入端连接,从而形成位置环。所述电流环包括伺服驱动器和伺服电机,所述伺服驱动器包括电流调节器、功率放大器和电流感应器,所述电流调节器的输入端与ARM控制器的输出端连接,所述电流调节器的输出端与功率放大器的输入端连接,所述功率放大器的输出端与伺服电机的输入端连接,所述电流感应器的输入端与伺服电机连接,所述电流感应器的输出端与电流调节器的输入端连接,从而形成电流环。
稳定平台系统控制结构,稳定平台控制结构建模。电流环、速度环和位置环组成的三环路伺服控制系统来抑制干扰。稳定平台能够以较高精度稳定横滚和俯仰两轴姿态,系统响应要快、抗干扰能力要强、负载承受能力要大、结构紧凑,而且在实际工程应用中,稳定平台控制系统的稳定精度不仅受到输入信号的限制,还会受到各种扰动的影响。
稳定平台的驱动与控制系统主要由伺服电机、伺服驱动器、位置控制器和角速度传感器、控制电子线路等部件组成。横滚和俯仰两个伺服回路的结构基本相同,平台的控制量、干扰输入量以及平台输入输出量也都是二维向量,而二维向量存在交叉耦合,在实际中这种交叉耦合作用通常不太明显,可按照单通道原理进行。稳定平台控制系统采用电流环、速度环和位置环组成的三闭环控制结构,电流环和速度环为系统内环,位置环为系统外环。电流环实现对电流的平稳控制,要求不发生突变、输出电流谐波分量小、能满足内环控制所需的控制响应速度、能精确控制随转速变化的电流;速度环用于增强系统抵抗扰动的能力,抑制速度的波形;位置环主要实现对目标指令的跟踪,通过位置控制器来保证系统的稳定精度和动态跟踪性能,改善控制系统性能。
一种小型舰船的稳定平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0