









专利摘要
本实用新型公开了一种基于微型自主航行器的水下地貌测量装置,其包括无人船、多波束测深仪的换能器基阵,该换能器基阵通过测深架安装于无人船船舷侧,测深架包括吊装杆,吊装杆下端设有用于安装多波束测深仪的法兰盘,吊装杆上端设有旋转臂,旋转臂一端与吊装杆上端垂直连接,旋转臂上具有前后两个环形凸肩,旋转臂另一端设有延伸臂,延伸臂与旋转臂同轴设置,延伸臂上套接有与延伸臂呈垂直关系的安装板,安装板固定于船舷内侧壁上,旋转臂上的两个环形凸肩之间的长度与船舷的上端面宽度适配,船舷的上端面卡入两个环形凸肩之间的间隙槽中,延伸臂自由侧具有阻止安装板脱出的扩大端沿。本实用新型具有结构稳定、抗风浪能力强、测量精度高等优点。
权利要求
1.一种基于微型自主航行器的水下地貌测量装置,包括无人船、多波束测深仪的换能器基阵,该换能器基阵通过测深架安装于无人船船舷侧,测深架包括吊装杆,吊装杆下端设有用于安装多波束测深仪的法兰盘,吊装杆上端设有旋转臂,旋转臂一端与吊装杆上端垂直连接,旋转臂上具有前后两个环形凸肩,其特征在于:所述旋转臂另一端设有延伸臂,该延伸臂与旋转臂同轴设置,该延伸臂上套接有与该延伸臂呈垂直关系的安装板,安装板固定安装于船舷内侧壁上,旋转臂上的两个环形凸肩之间的长度与船舷的上端面宽度适配,船舷的上端面卡入两个环形凸肩之间的间隙槽中,所述延伸臂自由侧具有阻止安装板脱出的扩大端沿。
2.根据权利要求1所述的基于微型自主航行器的水下地貌测量装置,其特征在于:所述船舷端面的内侧水平壁焊接有L型连接块,L型连接块的竖直部呈横向固定安装于船舷端面的内侧水平壁上,L型连接块的水平部与所述安装板通过紧固件连接。
3.根据权利要求2所述的基于微型自主航行器的水下地貌测量装置,其特征在于:所述L型连接块的水平部具有局部突出于船舷端面的内侧竖直壁之外,所述安装板朝向该局部的一侧设有可供该局部嵌入的开口槽,开口槽中设有通孔,通孔中配合有定位螺栓,定位螺栓从安装板一侧拧入并且依次穿过安装板和L型连接块的水平部后经螺母锁定。
4.根据权利要求3所述的基于微型自主航行器的水下地貌测量装置,其特征在于:所述定位螺栓包括螺栓帽和杆体,该杆体包括平滑段和螺纹段,平滑段与安装板上的通孔配合,螺纹段与L型连接块的水平部配合。
5.根据权利要求4所述的基于微型自主航行器的水下地貌测量装置,其特征在于:所述平滑段上设有呈纵向延伸且间隔分布的纵向凸筋。
说明书
技术领域
本实用新型涉及水下地形地貌测量设备技术领域,尤其是一种基于微型自主航行器的水下地貌测量装置。
背景技术
目前水下地形地貌测量工作原理是由水下分机向水中发射高频声波信号,声波遇到平台海底地基发生反射,反射信号再由水下分机接收并进行滤波、放大等调理操作后通过电缆上传至水上分机进行处理后得到255个深度测量值;其根据多波束声学探测基本原理设计而成,可利用多通道发射换能器阵实现探测超声波的宽覆盖,多通道接收换能器阵则保证对海底散射回波信号的高分辨力接收,从而有效地实现对海洋平台海底地基的高精度、高效率测量。
多波束回声测深仪是利用多波束回声信号测量、绘制海底地形和水深的装置。多波束测深仪按照其换能器基阵的安装方式可分为船底固定安装和船舷侧便携式安装两种,其中船底固定安装可保持基阵永久稳定,而船舷侧便携式安装则需要保证每次安装都有较高的效率、精度以及稳定性。
便携式多波束测深仪,包括水上控制处理分机和水下收发合置换能器基阵。其中换能器基阵一般需要安装在船舷侧。如中国专利授权公告号为:CN103910050B的《多波束测深仪基阵舷侧吊放安装装》,其包括固定于船舷上的基座,还包括固定在船体上的卡块和固定在基座和卡块之间的测深架,测深架包括上吊装杆和套在上吊装杆上的下吊装杆,上吊装杆下端设置有定位孔,下吊装杆的上部沿轴向设置有一排调节孔,定位孔和其中一个调节孔之间通过定位销相连,下吊装杆的下端设置有用于安装多波束测深仪的法兰盘,下吊装杆固定在卡块上,上吊装杆上设置有旋转臂,旋转臂固定在基座上。其采用了可调节长度吊装杆的设计技术方案,对于不同型号、不同吃水深度的测量船,可通过调节吊装杆长度来实现同一多波束测深仪基阵舷侧吊放安装装置在多种测量船上的安装。但是由于测深架是通过基座固定在船舷上,由图中看出基座是固定在船舷的上端面,在海况较差或者风浪较大的情况下,进行高速航行时,该基座可能就会受到风浪波动而出现松动,导致安装稳定性下降,进而影响测量精度。
实用新型内容
为了克服现有技术的不足,本实用新型提供了一种安装结构稳定的基于微型自主航行器的水下地貌测量装置。
为了实现上述目的,本实用新型采用的技术方案是:一种基于微型自主航行器的水下地貌测量装置,包括无人船、多波束测深仪的换能器基阵,该换能器基阵通过测深架安装于无人船船舷侧,测深架包括吊装杆,吊装杆下端设有用于安装多波束测深仪的法兰盘,吊装杆上端设有旋转臂,旋转臂一端与吊装杆上端垂直连接,旋转臂上具有前后两个环形凸肩,其特征在于:所述旋转臂另一端设有延伸臂,该延伸臂与旋转臂同轴设置,该延伸臂上套接有与该延伸臂呈垂直关系的安装板,安装板固定安装于船舷内侧壁上,旋转臂上的两个环形凸肩之间的长度与船舷的上端面宽度适配,船舷的上端面卡入两个环形凸肩之间的间隙槽中,所述延伸臂自由侧具有阻止安装板脱出的扩大端沿。
进一步的,所述船舷端面的内侧水平壁焊接有L型连接块,L型连接块的竖直部呈横向固定安装于船舷端面的内侧水平壁上,L型连接块的水平部与所述安装板通过紧固件连接。
进一步的,所述L型连接块的水平部具有局部突出于船舷端面的内侧竖直壁之外,所述安装板朝向该局部的一侧设有可供该局部嵌入的开口槽,开口槽中设有通孔,通孔中配合有定位螺栓,定位螺栓从安装板一侧拧入并且依次穿过安装板和L型连接块的水平部后经螺母锁定。
进一步的,所述定位螺栓包括螺栓帽和杆体,该杆体包括平滑段和螺纹段,平滑段与安装板上的通孔配合,螺纹段与L型连接块的水平部配合。
进一步的,所述平滑段上设有呈纵向延伸且间隔分布的纵向凸筋。
采用上述方案,本实用新型中的吊装杆上端安装有旋转臂,该旋转臂具有轴向的延伸臂,该延伸臂用于与安装板形成套接配合固定安装于船舷内侧,使得该旋转臂只能周向转动而不能上下移动;而旋转臂其前后两个环形凸肩卡在船舷的上端面两侧,则形成沿旋转臂轴向的限位配合使其无法来回移动,从而形成更为稳定的安装结构;此外,安装板与L型连接块之间有局部的嵌入式配合,起到进一步的定位作用。
下面结合附图对本实用新型作进一步描述。
附图说明
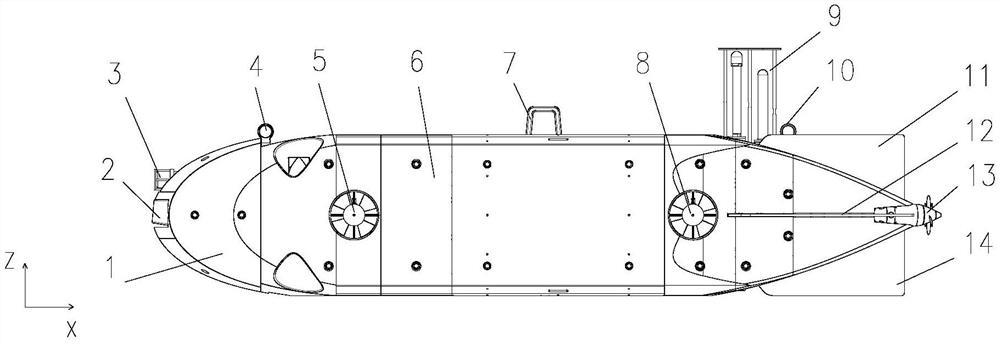
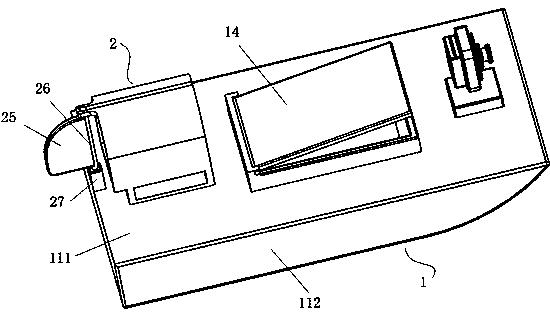
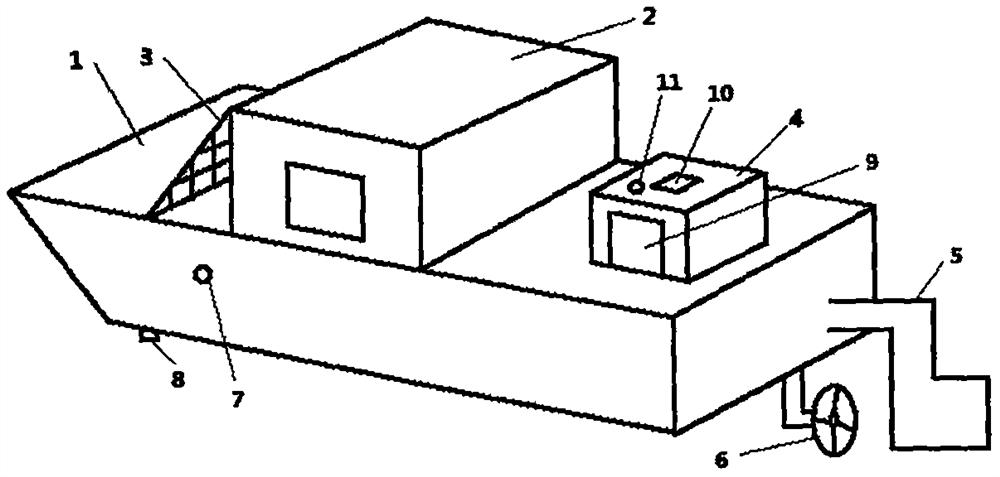
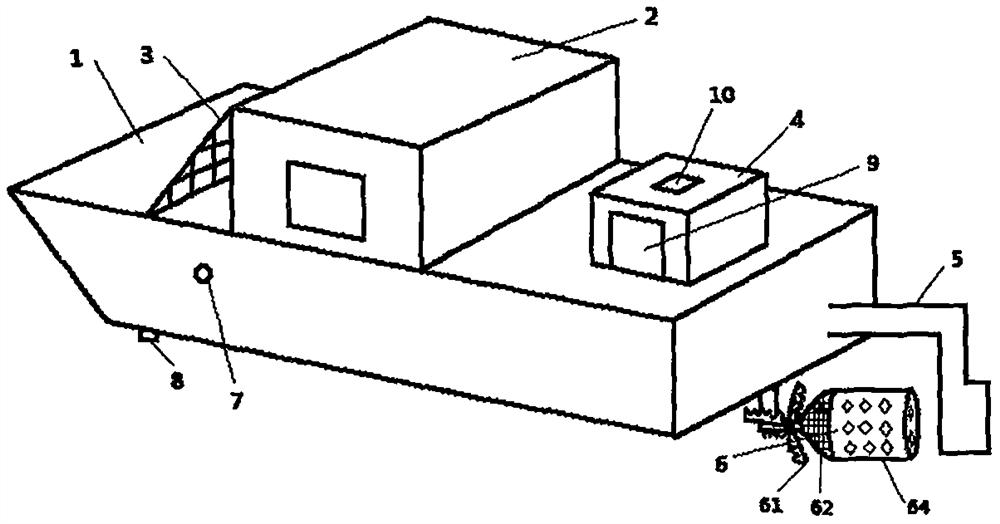
附图1为本实用新型具体实施例结构示意图;
附图2为本实用新型具体实施例船体及船舷局部结构图;
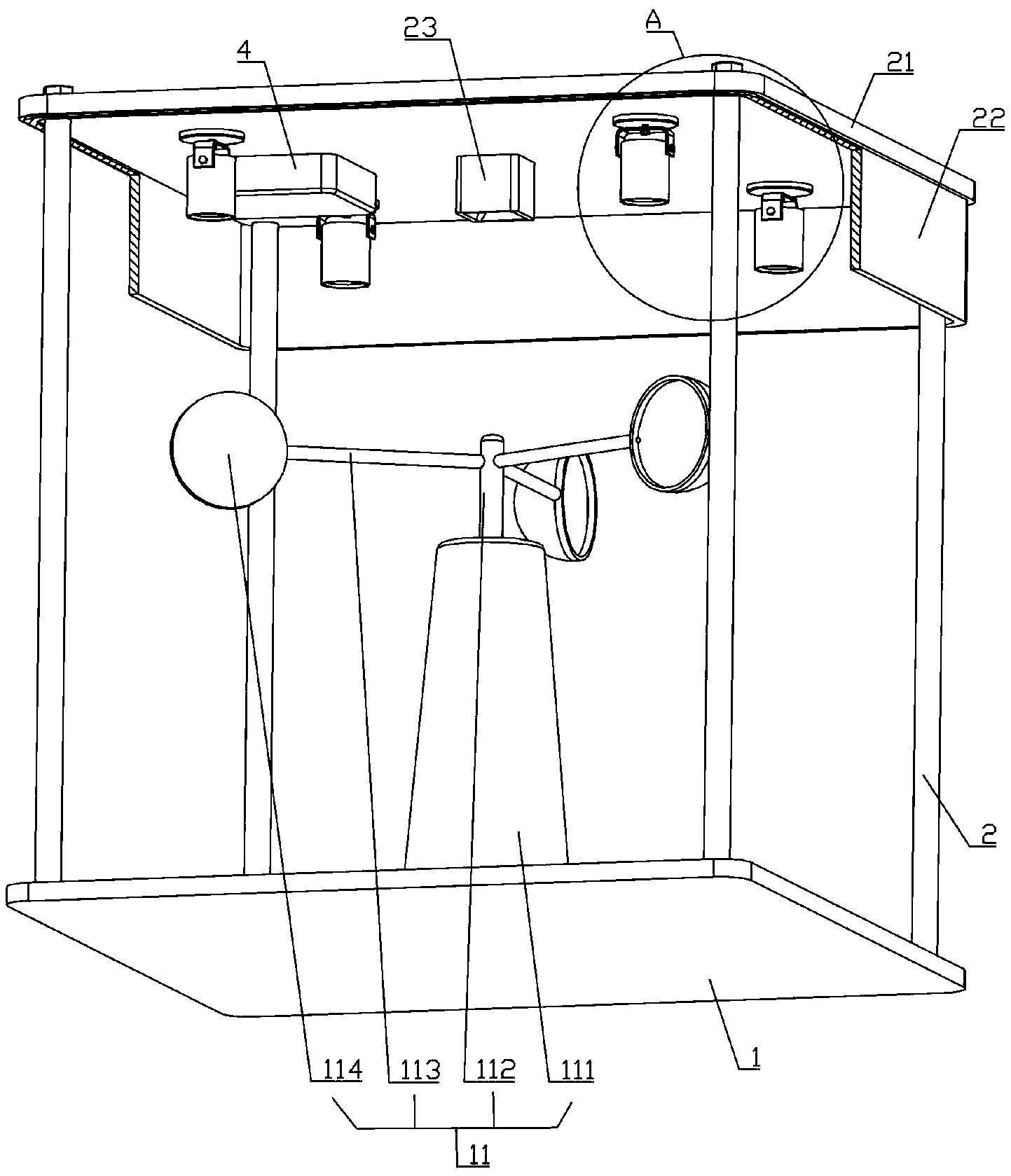
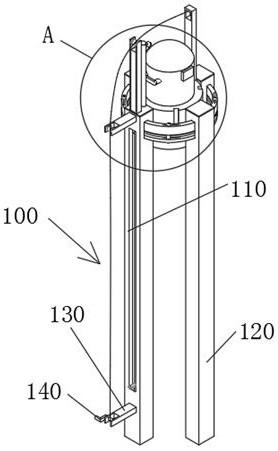
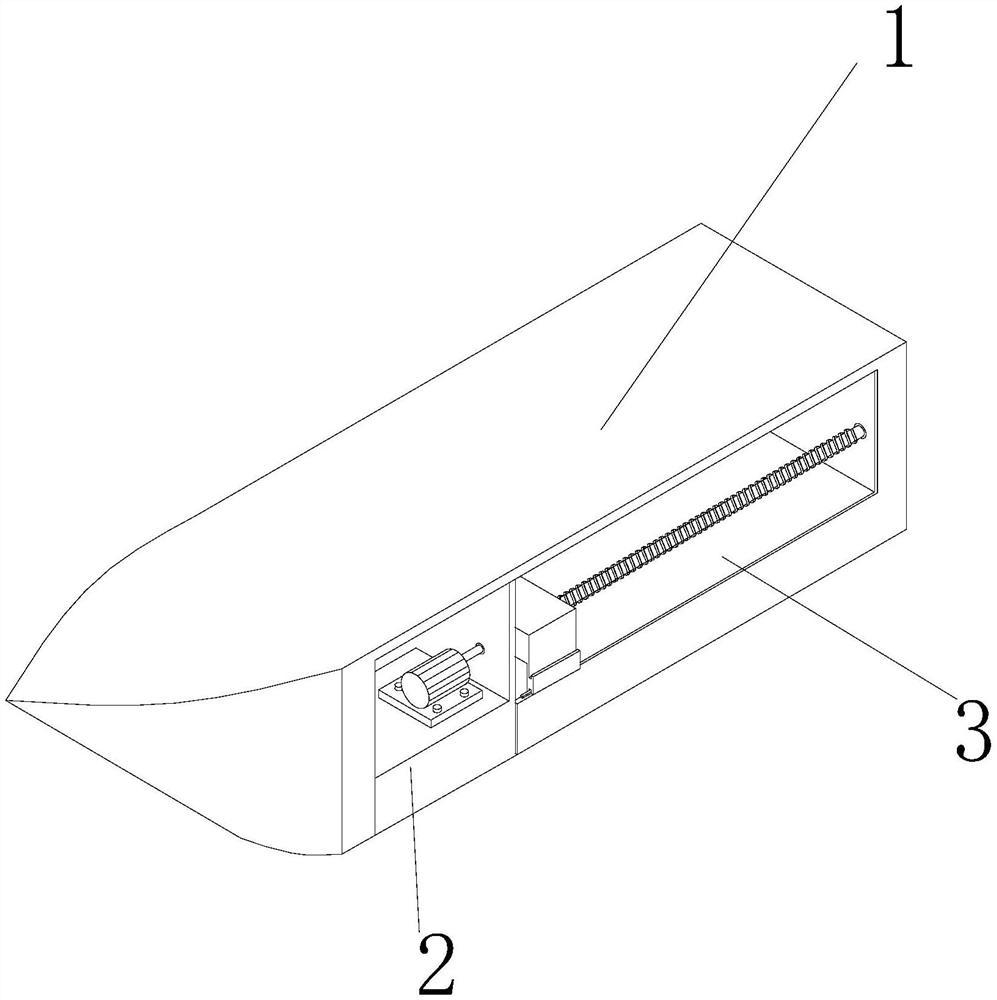
附图3为本实用新型具体实施例测深架的局部结构结构图;
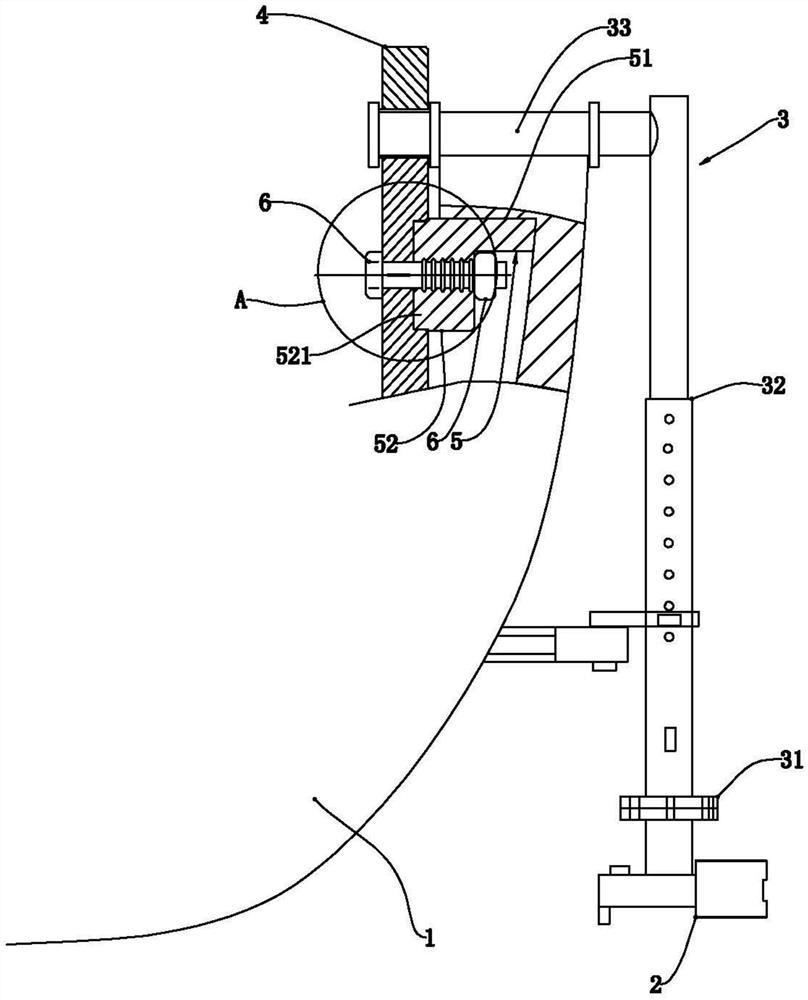
附图4为本实用新型具体实施例局部A的结构放大图;
无人船1、多波束测深仪2、测深架3、法兰盘31、吊装杆32、旋转臂33、环形凸肩331、间隙槽332、延伸臂333、扩大端沿334、安装板4、船舷的上端面11、船舷的下端面12、船舷的内侧端面13、船体内侧面14、凹槽15、L型连接块5、竖直部51、水平部52、局部521、开口槽、头部521a、肩部521b、定位螺栓6、螺母7、螺栓帽61、杆体62、平滑段621、纵向凸筋622、螺纹段623。
具体实施方式
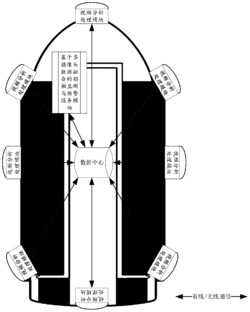
本实用新型的具体实施例如图1-4所示是基于微型自主航行器的水下地貌测量装置,可以由无人船1、基准站、主操控设备和遥控、换能器阵和信号处理机设备组成,而多波束测深仪2的换能器基阵,通过测深架3安装于无人船1的船舷侧。本实用新型主要针对多波束测深仪2的稳定安装结构进行改进设计。具体的,测深架3包括吊装杆32,吊装杆32下端设有用于安装多波束测深仪2的法兰盘31,吊装杆32上端设有旋转臂33,旋转臂33一端与吊装杆32上端垂直连接,旋转臂33上具有前后两个环形凸肩331(如图1中以左侧为前,右侧为后),旋转臂33另一端(即前端)设有延伸臂333,该延伸臂333与旋转臂33同轴设置,该延伸臂333上套接有与该延伸臂333呈垂直关系的安装板4,安装板4对旋转臂33有上下方向的限位作用(图1中的上下方向),安装板4固定安装于船舷内侧(该内侧是相对于船体外侧而言,也可以是认为船体内侧一面,是宽泛的内外侧方向表达),旋转臂33上的两个环形凸肩331之间的长度与船舷的上端面11宽度适配,船舷的上端面11卡入两个环形凸肩331之间的间隙槽332中,使得旋转臂33在前后方向受到限位。为了避免安装板4从延伸臂333上脱出,该延伸臂333的自由侧可以设置一扩大端沿334,该扩大端沿334可以采用螺纹旋接上去,可以采用焊接固定等。
船舷的上端面11与延伸臂333的两个环形凸肩331之间的间隙槽332配合,船舷的下端面12与船体内侧面14之间则留有大约呈7字型的凹槽15,该凹槽15中设有L型连接块5。L型连接块5的竖直部51呈横向固定安装于船舷端面的内侧水平壁(即船舷的下端面12)上,L型连接块5的水平部52与安装板4通过紧固螺栓和螺母7连接。L型连接块5的水平部52具有局部521突出于船舷端面的内侧竖直壁(即船舷的内侧端面13)之外,安装板4朝向该局部521的一侧设有可供该局部521嵌入的开口槽,进一步的,该局部521呈凸型结构,其头部521a嵌入开口槽中,而其肩部521b则对安装板4的开口槽有限位作用。开口槽中设有通孔,通孔中配合有定位螺栓6(即上述的紧固件或紧固螺栓),定位螺栓6从安装板4一侧拧入并且依次穿过安装板4和L型连接块5的水平部52后经螺母7锁定。
进一步的,定位螺栓6包括螺栓帽61和杆体62,该杆体62包括平滑段621和螺纹段623,平滑段621与安装板4上的通孔配合,螺纹段623与L型连接块5的水平部52配合。平滑段621上设有呈纵向延伸且间隔分布的纵向凸筋622,纵向凸筋622嵌入安装板4的通孔中可以增加两者配合的摩擦力,防止松动。
本实用新型不局限于上述具体实施方式,本领域一般技术人员根据本实用新型公开的内容,可以采用其他多种具体实施方式实施本实用新型的,或者凡是采用本实用新型的设计结构和思路,做简单变化或更改的,都落入本实用新型的保护范围。
一种基于微型自主航行器的水下地貌测量装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0