









专利摘要
一种多绳摩擦提升超深度大吨位提升系统,由采用复绕式结构的大牵引力首绳驱动系统以及平衡绳驱动系统共同驱动,每根平衡绳上均安装有平衡绳调节装置,两侧的平衡绳调节装置安装高度上下错开;平衡绳调节装置中对应每根平衡绳上均安装有一个左右导向轮组,每个导向轮组均由三个导向轮和一个液压缸构成,液压缸与相应的中间导向轮相连并安装在同一高度,所有液压缸共同连接至泵站;平衡绳的张紧力在提升循环过程中通过泵站驱动液压缸,带动平衡绳上导向轮平移来调节,减小在整个提升循环中系统首绳各截面的张力波动值。本发明能整体布置在竖井井筒中,不占巷道空间,还能减小平衡绳的驱动力矩,提高整个提升系统的稳定性,延长钢丝绳的使用寿命。
权利要求
1.一种多绳摩擦提升超深度大吨位提升系统,包括首绳(120,220)、左容器(131,231)、右容器(132,232)和平衡绳(140,240),首绳(120,220)的两端分别连接至左容器(131,231)和右容器(132,232)的上方,左容器(131,231)、右容器(132,232)的下方由平衡绳两端连接形成闭合系统,其特征是:所述的首绳(120,220)和平衡绳(140,240)分别通过首绳驱动系统(110,210)和平衡绳驱动系统(170,270)驱动后再连接至容器,平衡绳驱动系统(170,270)与左容器(131,231)、右容器(132,232)之间的平衡绳(140,240)上分别安装有左侧平衡绳调节装置(150,250)与右侧平衡绳调节装置(160,260);左侧平衡绳调节装置(150,250)中对应每根平衡绳(140,240)上均安装有一个左导向轮组(151,251),每一个左导向轮组(151,251)均由三个左侧导向轮和一个左侧液压缸(151-3,251-3)构成,左侧液压缸(151-3,251-3)与左侧中间导向轮(151-2,251-2)相连并安装在同一高度,所有的左侧液压缸(151-3,251-3)均连接至左侧泵站(153,253);右侧平衡绳调节装置(160,260)中对应每根平衡绳(140,240)上均安装有一个右导向轮组(161,261),每一个右导向轮组(161,261)均由三个右侧导向轮和一个右侧液压缸(161-3,261-3)构成,右侧液压缸(161-3,261-3)与右侧中间导向轮(161-2,261-2)相连并安装在同一高度,所有的右侧液压缸(161-3,261-3)均连接至右侧泵站(163,263);右侧平衡绳调节装置(160,260)的安装高度与左侧平衡绳调节装置(150,250)整体错开;
其使用方法为,在整个系统的提升循环过程中,随着一侧容器的上提,另一侧容器的下放,由于相应的钢丝绳长度变化,会造成首绳(120,220)各截面的张力产生波动;通过实时调节左侧液压缸(151-3,251-3)和右侧液压缸(161-3,261-3)上的力以调节平衡绳(140,240)上的张紧力,减缓整个提升循环中首绳(120,220)各截面的张力波动以及保证平衡绳驱动轮(171,271)的驱动力矩最小,具体的方法为:
平衡绳驱动轮(171,271)端的左、右两侧平衡绳(140,240)共所受的力分别为:
左侧装载,右侧卸载的过程中:
随着左侧载重的增加而相应降低平衡绳(140,240)左侧的张力F
左侧上提,右侧下放的过程中:
随着左侧上提,平衡绳(140,240)左侧的张力F
左侧卸载,右侧装载的过程中:
随着右侧载重的增加而逐渐降低平衡绳(140,240)右侧的张力F
左侧下放,右侧上提的过程中:
随着右侧上提,平衡绳(140,240)左侧的张力F
其中,x为随时间变化的从上到下的深度,m为左、右容器(132,232)单次装载的载重质量,R为平衡绳驱动轮(171,271)的半径。
2.根据权利要求1所述的一种多绳摩擦提升超深度大吨位提升系统,其特征是:每根所述的平衡绳(140,240)上左平衡绳调节装置所对应的左导向轮组(151,251),与其上右侧平衡绳调节装置(160,260)所对应的右导向轮组(161,261)的安装位置,相互错开或在同一水平面。
3.根据权利要求1或2所述的一种多绳摩擦提升超深度大吨位提升系统,其特征是:所述的提升系统采用复绕式结构的首绳驱动系统(110,210)以及复绕式结构的平衡绳驱动系统(170,270)共同驱动。
4.根据权利要求3所述的一种多绳摩擦提升超深度大吨位提升系统,其特征是:所述首绳驱动系统(110,210)包括首绳驱动轮(111,211)和首绳复绕导向轮(112,212),首绳(120,220)向下依次绕经首绳驱动轮(111,211)、首绳复绕导向轮(112,212)和首绳驱动轮(111,211)后,两端再连接至左容器(131,231)和右容器(132,232)。
5.根据权利要求4所述的一种多绳摩擦提升超深度大吨位提升系统,其特征是:所述的平衡绳驱动系统(170,270)包括平衡绳驱动轮(171,271)和平衡绳复绕导向轮(172,272),平衡绳(140,240)向上依次绕经平衡绳驱动轮(171,271)、平衡绳复绕导向轮(172,272)和平衡绳驱动轮(171,271)后,两端再连接至左容器(131,231)和右容器(132,232)。
6.根据权利要求1或2所述的一种多绳摩擦提升超深度大吨位提升系统,其特征是:同一侧所述每根平衡绳(140,240)上所有的左侧液压缸(151-3,251-3)分别通过左侧管路(152,252)连通至左侧泵站(153,253),其上所有右侧液压缸(161-3,261-3)分别通过右侧管路(162,262)与右侧泵站(163,263)连通。
7.根据权利要求1或2所述的一种多绳摩擦提升超深度大吨位提升系统,其特征是:所述的左侧平衡绳调节装置(150,250)与右侧平衡绳调节装置(160,260)均安装在立井的井筒底部。
说明书
技术领域
本发明涉及一种多绳摩擦提升超深度大吨位提升系统及使用方法,属于超深矿山立井技术领域。
背景技术
多绳摩擦提升系统中,由于平衡绳、首绳自重以及载重的影响,在提升循环中会使系统发生应力波动,在一定程度上限制了摩擦提升系统的所能提升的最大高度以及所能装载的最大净载重值,而且提升深度较深的大吨位提升系统中的应力波动较大,影响了钢丝绳的使用寿命,不利于提升系统的安全运行。
同时在多绳摩擦提升系统中,由于各根平衡绳间的张力由于更换钢丝绳时,其长度不可能调整得绝对相等,因此,所有钢丝绳的弹性伸长就不相同,从而造成钢丝绳的张力也就不平衡;平衡绳的几何尺寸和机械性能如抗拉强度、弹性模数等有差别;由于平衡绳驱动轮的衬垫老化、加工误差等造成各根绳槽圆度不同,导致牵引过程各根钢丝绳的运动距离不同,各钢丝绳受力不均等多种原因下,目前主要采用与容器固定的液压张力平衡装置进行调整,增加了容器的自重,同时调节的距离有限。
发明内容
为了克服现有技术的上述不足,本发明提供一种多绳摩擦提升超深度大吨位提升系统及使用方法,该系统能够适量减小提升过程产生的应力波动的同时,实现超深度大吨位提升。
本发明解决其技术问题采用的技术方案是:包括首绳、左容器、右容器和平衡绳,首绳的两端分别连接至左容器和右容器的上方,左容器、右容器的下方由平衡绳两端连接形成闭合系统,所述的首绳和平衡绳分别通过首绳驱动系统和平衡绳驱动系统驱动后再连接至容器,平衡绳驱动系统与左容器、右容器之间的平衡绳上分别安装有左侧平衡绳调节装置与右侧平衡绳调节装置;左侧平衡绳调节装置中对应每根平衡绳上均安装有一个左导向轮组,每一个左导向轮组均由三个左侧导向轮和一个左侧液压缸构成,左侧液压缸与左侧中间导向轮相连并安装在同一高度,所有的左侧液压缸共同连接至左侧泵站;右侧平衡绳调节装置中对应每根平衡绳上均安装有一个右导向轮组,每一个右导向轮组均由三个右侧导向轮和一个右侧液压缸构成,右侧液压缸与右侧中间导向轮相连并安装在同一高度,所有的右侧液压缸共同连接至右侧泵站;右侧平衡绳调节装置的安装高度与左侧平衡绳调节装置整体错开。
一种多绳摩擦提升超深度大吨位提升系统的使用方法,在整个系统的提升循环过程中,随着一侧容器的上提,另一侧容器的下放,由于相应的钢丝绳长度变化,会造成首绳各截面的张力产生波动;通过实时调节左侧液压缸和右侧液压缸上的力以调节平衡绳上的张紧力,减缓整个提升循环中首绳各截面的张力波动以及保证平衡绳驱动轮的驱动力矩最小,具体的方法为:
平衡绳驱动轮端的左、右两侧平衡绳共所受的力分别为: 式中,F1、F2分别为左侧液压缸的合力和右侧液压缸的合力,且时刻与左、右两侧平衡绳满足 关系;
左侧装载,右侧卸载的过程中:
随着左侧载重的增加而相应降低平衡绳左侧的张力Fa,而平衡绳右侧的张力Fb不变,直至装载完成,平衡绳左侧的张力Fa减小的幅值ΔFa刚好等于装载的重量mg,此刻平衡绳左侧的张力Fa与平衡绳右侧的张力Fb相等,在此装卸载的过程中,减小了系统的左侧由于装载产生的张力波动,且系统处于静止状态,此时平衡绳驱动轮的驱动力矩为零;
左侧上提,右侧下放的过程中:
随着左侧上提,平衡绳左侧的张力Fa和平衡绳右侧的张力Fb先保持不变,直到右容器下端的平衡绳的右侧端的自重为装载的重量mg时,平衡绳右侧的张力Fb随着右侧深度x的增加逐渐增大,直至到达右侧下放的最终位置,平衡绳右侧的张力Fb达到最大值,张力Fb增大的幅值ΔFb刚好等于装载的重量mg,而平衡绳驱动轮的驱动力矩T=(Fb-Fa)R随着提升深度x的增大而逐渐由零增大至mgR;
左侧卸载,右侧装载的过程中:
随着右侧载重的增加而逐渐降低平衡绳右侧的张力Fb,而平衡绳左侧的张力Fa不变,直至装载完成,平衡绳右侧的张力Fb减小的幅值ΔFb刚好等于装载的重量mg,此刻平衡绳左侧的张力Fa与平衡绳右侧的张力Fb相等,在此装卸载的过程中,减小了系统的右侧由于装载产生的张力波动,且系统处于静止状态,平衡绳驱动轮的驱动力矩为零;
左侧下放,右侧上提的过程中:
随着右侧上提,平衡绳左侧的张力Fa和平衡绳右侧的张力Fb先保持不变,直到左容器下端的平衡绳的左侧端的自重为装载的重量mg时,平衡绳左侧的张力Fa随着左侧深度x的增加逐渐增大,直至到达左侧下放的最终位置,平衡绳左侧的张力Fa达到最大值,张力Fa增大的幅值ΔFa刚好等于装载的重量mg,而平衡绳驱动轮的驱动力矩T=(Fa-Fb)R随着提升深度x的增大而逐渐由零增大至mgR;
其中,x为随时间变化的从上到下的深度,m为左、右容器单次装载的载重质量,R为平衡绳驱动轮的半径。
相比现有技术,本发明的一种多绳摩擦提升超深度大吨位提升系统及使用方法,其有益效果如下:
(1)平衡绳调节装置布置在竖井井筒内,不占用巷道空间,合理的利用有限的空间,提高了空间利用率;
(2)避免了容器下方需要的平衡装置,减轻了容器的自重,从而一定程度上减少了应力波动值;
(3)通过泵站实现平衡绳上张紧力的实时调节,有效的减小了提升循环过程中系统的最大张力波动值,减少了平衡绳的驱动力矩;
(4)各根平衡绳是独立进行张紧的,既满足了平衡绳的张力,同时保证了各根平衡绳的张力均衡,提高了平衡绳牵引的安全性。
附图说明
下面结合附图和实施例对本发明进一步说明。
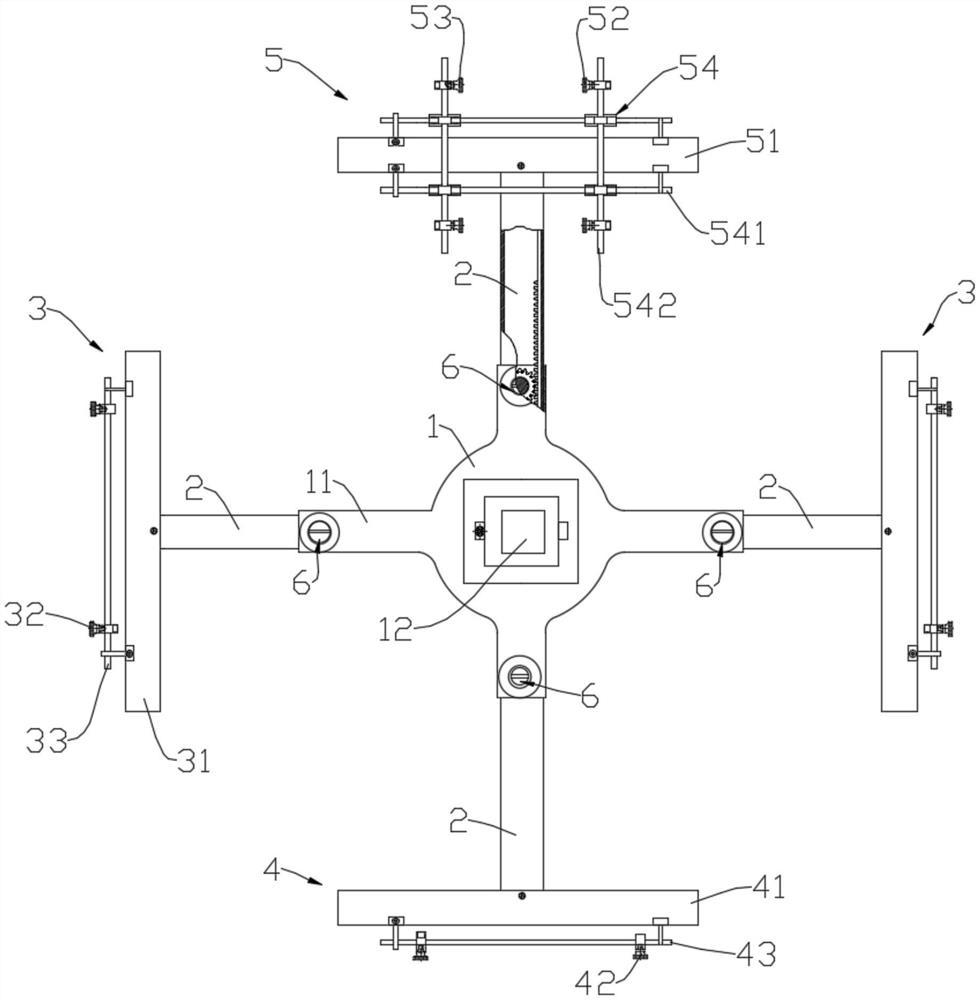
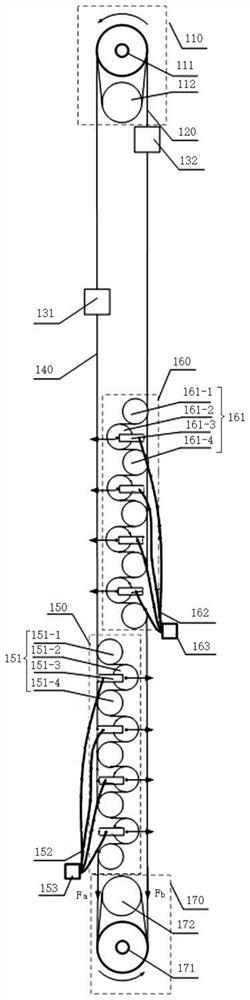
图1是本发明一个实施例的结构示意图。
图2是图1实施例中左侧平衡绳调节装置的侧视图,示出了各左导向轮组之间的相对位置关系。
图3是图1实施例中右侧平衡绳调节装置的侧视图,示出了各右导向轮组之间的相对位置关系。
在该第一实施例的图中,110、首绳驱动系统,111、首绳驱动轮,112、首绳复绕导向轮,120、首绳,131、左容器,132、右容器,140、平衡绳,150、左侧平衡绳调节装置,151、左导向轮组,151-1、左侧上导向轮,151-2、左侧中间导向轮,151-3、左侧液压缸,151-4、左侧下导向轮,152、左侧管路,153、左侧泵站,160、右侧平衡绳调节装置,161、右导向轮组,161-1、右侧上导向轮,161-2、右侧中间导向轮,161-3、右侧液压缸,161-4、右侧下导向轮,162、右侧管路,163、右侧泵站,170、平衡绳驱动系统,171、平衡绳驱动轮,172、平衡绳复绕导向轮。
图4是本发明另一个实施例的结构示意图。
图5是图4实施例中左侧平衡绳调节装置的侧视图,示出了各左导向轮组之间的相对位置关系。
图6是图4实施例中右侧平衡绳调节装置的侧视图,示出了各右导向轮组之间的相对位置关系。
在该第二实施例的图中,210、首绳驱动系统,211、首绳驱动轮,212、首绳复绕导向轮,220、首绳,231、左容器,232、右容器,240、平衡绳,250、左侧平衡绳调节装置,251、左导向轮组,251-1、左侧上导向轮,251-2、左侧中间导向轮,251-3、左侧液压缸,251-4、左侧下导向轮,252、左侧管路,253、左侧泵站,260、右侧平衡绳调节装置,261、右导向轮组,261-1、右侧上导向轮,261-2、右侧中间导向轮,261-3、右侧液压缸,261-4、右侧下导向轮,262、右侧管路,263、右侧泵站,270、平衡绳驱动系统,271、平衡绳驱动轮,272、平衡绳复绕导向轮。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
图1至图3示出了本发明第一个较佳的实施例的结构示意图,如图1所示,为四根钢丝绳的超深度大吨位提升系统,系统中的首绳120绕过首绳驱动轮111和首绳复绕导向轮112后,两端分别与左容器131、右容器132的上方相连接,左容器131、右容器132的下端通过平衡绳140连接形成闭合系统,平衡绳140在底部绕经有平衡绳驱动轮171和平衡绳复绕导向轮172,所述的首绳驱动系统110与平衡绳驱动系统170均采用复绕式驱动结构,以实现大牵引力的提升。平衡绳140的左、右两侧分别设置有左侧平衡绳调节装置150、右侧平衡绳调节装置160,左侧平衡绳调节装置150与右侧平衡绳调节装置160均安装在立井的井筒底部,左侧平衡绳调节装置150与右侧平衡绳调节装置160在平衡绳140上的所设置的位置是上下相对错开的,以保证左、右侧平衡绳调节装置160均能布置在竖井井筒内。左侧平衡绳调节装置150中对应每根平衡绳140上均安装有一个左导向轮组151,每一个左导向轮组151均由三个左侧导向轮(即左侧上导向轮151-1、左侧中间导向轮151-2和左侧下导向轮151-4)和一个左侧液压缸151-3构成;右侧平衡绳调节装置160中对应每根平衡绳140上均安装有一个右导向轮组161,每一个右导向轮组161均由三个右侧导向轮(即右侧上导向轮161-1、右侧中间导向轮161-2和右侧下导向轮161-4)和一个右侧液压缸161-3构成。各根平衡绳140的左侧平衡绳调节装置150之间也是上下错开的,每根平衡绳140上所对应四个的左侧液压缸151-3分别与四个左侧中间导向轮151-2相连接,并且左侧液压缸151-3与左侧中间导向轮151-2安装在同一高度,以保证液压缸的运动驱动中间导向轮的平移,从而实现对平衡绳140上张紧力的调节;四个左侧液压缸151-3再通过左侧管路152共同连接至左侧泵站153;左侧液压缸151-3在左侧泵站153作用下实现左侧平衡绳140上导向轮的调节,从而实现对左侧平衡绳140上张紧力的调节。各根平衡绳140的右侧平衡绳调节装置160之间也是上下错开的,每根平衡绳140上所对应的四个右侧液压缸161-3分别与四个右侧中间导向轮161-2相连接,右侧液压缸161-3与右侧中间导向轮161-2也安装在同一高度,四个右侧液压缸161-3再通过右侧管路162共同连接至右侧泵站163,平衡绳驱动系统170与右容器132之间的平衡绳140上的张紧力则是通过右侧液压缸161-3在右侧泵站163作用下实现右侧平衡绳140上导向轮的调节,进行加载和调节的。
如图2和图3所示,分别为图1所示的提升系统中左侧平衡绳调节装置150和右侧平衡绳调节装置160中的每根平衡绳140上的四个导向轮组的相对安装位置图,从图中可知,不仅每根平衡绳140上四个导向轮组上下位置是错开的,组成每个导向轮组三个导向轮上下位置也是错开的。
图4至图6示出了本发明第二个较佳的实施例的结构示意图,如图4所示,为同侧的平衡绳调节装置(即所有的左侧平衡绳调节装置250或所有的右侧平衡绳调节装置260)在同一水平高度的多绳摩擦超深度大吨位提升系统结构图,该系统中的各结构的安装方式与图1所示系统结构的安装方式是相同的,不再赘述;而区别仅在于各平衡绳240上的左平衡绳调节装置与右平衡绳调节装置的相对水平高度不同。
如图5和图6所示,为图4所示的提升系统中左侧平衡绳调节装置250和右侧平衡绳调节装置260中每根平衡绳240上的左导向轮组161和右导向轮组261的相对安装位置,从图中可知,每根平衡绳240上的四个左导向轮组161均布置在同一水平面上,四个右导向轮组261也均布置在同一水平面上。
一种多绳摩擦提升超深度大吨位提升系统的使用方法,在整个系统的提升循环过程中,随着一侧容器(左容器131、231或右容器132、232)的上提,另一侧容器(右容器132、232或左容器131、231)的下放,由于相应的钢丝绳长度变化,会造成首绳120、220各截面的张力产生波动。通过实时调节左侧液压缸151-3、251-3和右侧液压缸161-3、261-3上的力以调节平衡绳140、240上的张紧力,从而减缓整个提升循环中首绳120、220各截面的张力波动以及保证平衡绳驱动轮171、271的驱动力矩最小,具体的方法为:
平衡绳驱动轮171、271端的左、右两侧平衡绳140、240共所受的力分别为: 式中,F1、F2分别为左侧液压缸151-3、251-3的合力和右侧液压缸161-3、261-3的合力,且时刻与左、右两侧平衡绳140、240满足 关系。
左侧装载,右侧卸载的过程中:
随着左侧载重的增加而相应降低平衡绳140、240左侧的张力Fa,而平衡绳140、240右侧的张力Fb不变,直至装载完成,平衡绳140、240左侧的张力Fa减小的幅值ΔFa刚好等于装载的重量mg,此刻平衡绳140、240左侧的张力Fa与平衡绳140、240右侧的张力Fb相等,在此装卸载的过程中,减小了系统的左侧由于装载产生的张力波动,且系统处于静止状态,此时平衡绳驱动轮171、271的驱动力矩为零。
左侧上提,右侧下放的过程中:
随着左侧上提,平衡绳140、240左侧的张力Fa和平衡绳140、240右侧的张力Fb先保持不变,直到右容器132、232下端的平衡绳140、240的右侧端的自重为装载的重量mg时,平衡绳140、240右侧的张力Fb随着右侧深度x的增加逐渐增大,直至到达右侧下放的最终位置,平衡绳140、240右侧的张力Fb达到最大值,张力Fb增大的幅值ΔFb刚好等于装载的重量mg,而平衡绳驱动轮171、271的驱动力矩T=(Fb-Fa)R随着提升深度x的增大而逐渐由零增大至mgR。
左侧卸载,右侧装载的过程中:
随着右侧载重的增加而逐渐降低平衡绳140、240右侧的张力Fb,而平衡绳140、240左侧的张力Fa不变,直至装载完成,平衡绳140、240右侧的张力Fb减小的幅值ΔFb刚好等于装载的重量mg,此刻平衡绳140、240左侧的张力Fa与平衡绳140、240右侧的张力Fb相等,在此装卸载的过程中,减小了系统的右侧由于装载产生的张力波动,且系统处于静止状态,平衡绳驱动轮171、271的驱动力矩为零。
左侧下放,右侧上提的过程中:
随着右侧上提,平衡绳140、240左侧的张力Fa和平衡绳140、240右侧的张力Fb先保持不变,直到左容器131、231下端的平衡绳140、240的左侧端的自重为装载的重量mg时,平衡绳140、240左侧的张力Fa随着左侧深度x的增加逐渐增大,直至到达左侧下放的最终位置,平衡绳140、240左侧的张力Fa达到最大值,张力Fa增大的幅值ΔFa刚好等于装载的重量mg,而平衡绳驱动轮171、271的驱动力矩T=(Fa-Fb)R随着提升深度x的增大而逐渐由零增大至mgR。
其中,x为随时间变化的从上到下的深度,m为左、右容器132、232单次装载的载重质量,R为平衡绳驱动轮171、271的半径。
以上所述,仅是本发明的较佳实施例,并非对本发明做任何形式上的限制,凡是依据本发明的技术实质,对以上实施例所做出任何简单修改和同等变化,均落入本发明的保护范围之内。
一种多绳摩擦提升超深度大吨位提升系统及使用方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0