









专利摘要
本公开揭示了一种恒力自适应马桶清洁机器人,包括:旋转机构、摆杆机构、恒力刷头、伸缩机构、驱动机构、升降机构、控制机构和电滑环组件。本公开刷头部分为恒力设计,可使刷头与马桶内壁保持恒定接触力,保证了良好的清洁效果;另外,刷头部分的可折展设计,可使刷头对马桶内壁任意位置进行清洁,清洁范围较大。在展开状态下,刷板在接触马桶内壁不同位置时受力变形,以适合内壁形状的姿态贴合马桶内壁,在刷洗排水口时,刷板因受力可以完全收起,使其减小面积,伸入排水口进行清洁。
权利要求
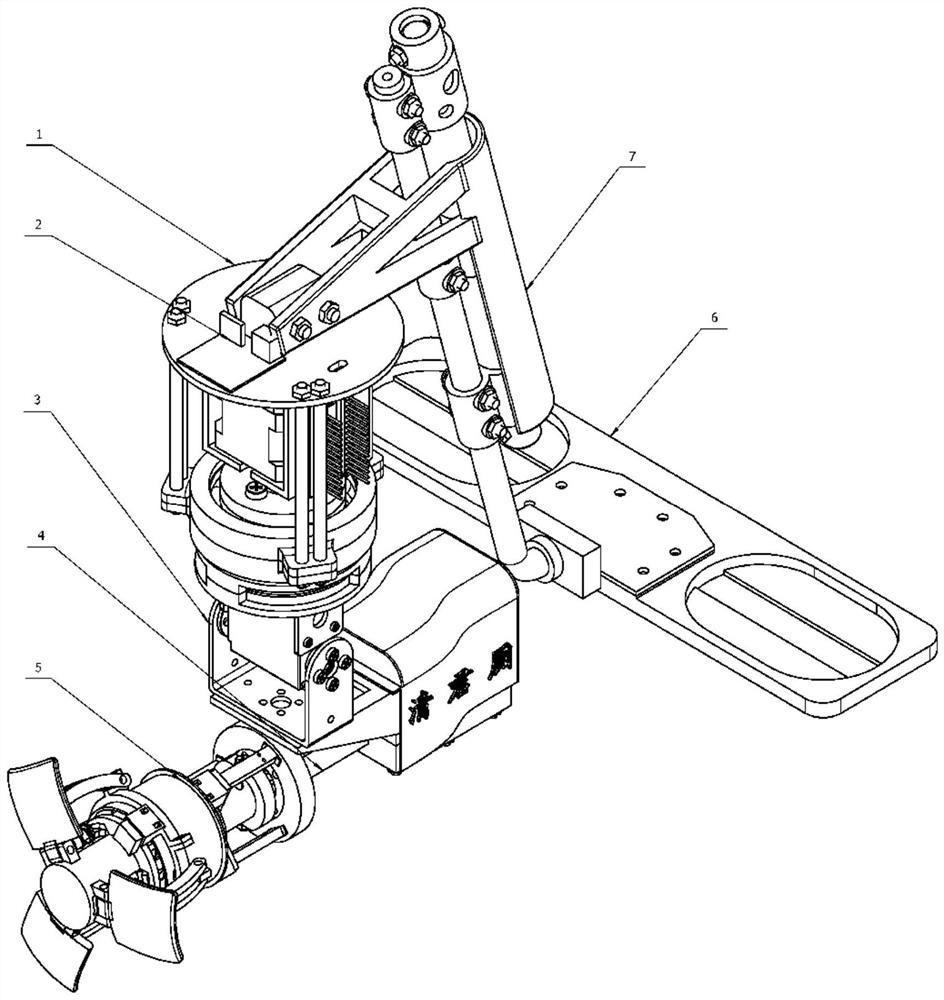
1.一种恒力自适应马桶清洁机器人,包括:旋转机构、伸缩机构、升降机构、驱动机构、恒力刷头和摆杆机构;其中,
所述旋转机构用于驱动恒力刷头在马桶内壁水平面内进行圆周运动;
所述伸缩机构用于驱动恒力刷头在马桶内壁轴向一定范围内进行俯仰运动;
所述升降机构用于调节恒力刷头与马桶内壁的接触高度;
所述驱动机构用于为旋转机构提供旋转驱动力,以及用于为伸缩机构提供伸缩驱动力和为恒力刷头提供自转驱动力;
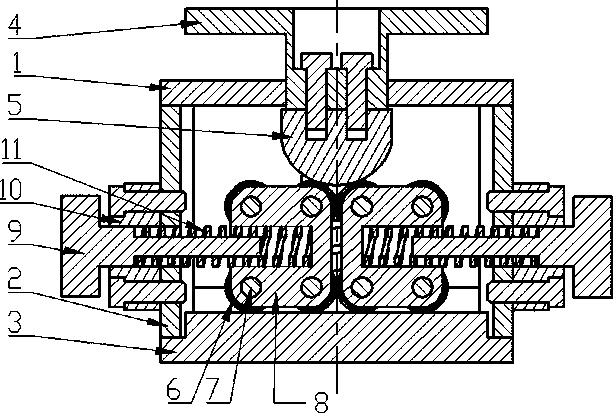
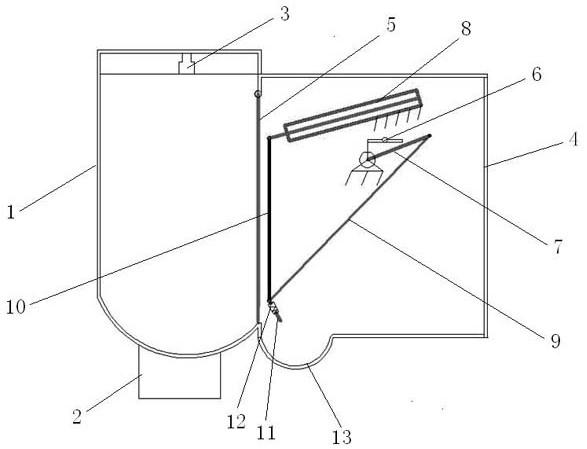
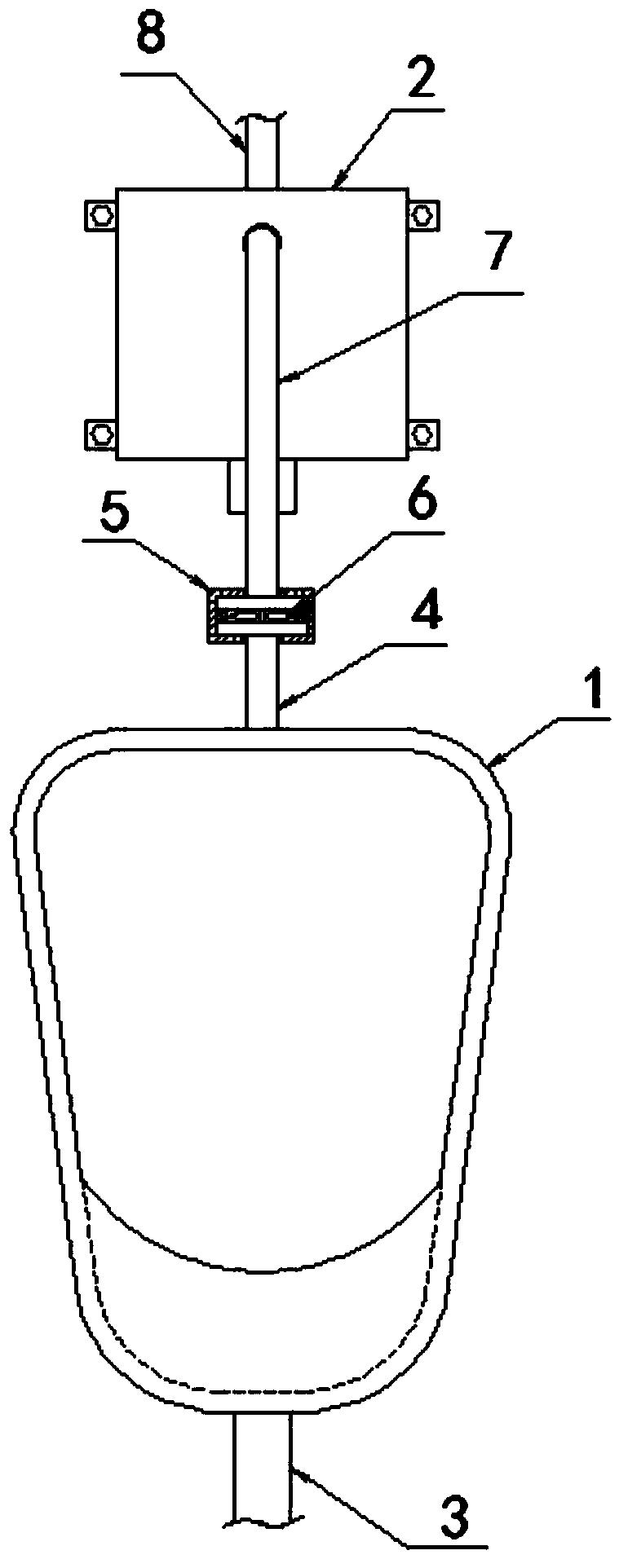
所述恒力刷头包括恒力矩摆杆组件、主辅式恒力弹簧组件、曲柄滑块组件和刷板;
刷板与马桶内壁接触时,刷板自动向内旋转收缩,未与马桶内壁接触时,在恒力矩摆杆组件的作用下向外旋转展开,其中,所述恒力矩摆杆组件包括恒力矩摆杆固定轴、恒力矩摆杆弹簧和摆杆,恒力矩摆杆弹簧的一端通过刷板旋转轴与刷板连接,另一端与摆杆连接,摆杆的另一端与恒力矩摆杆固定轴连接;刷板与马桶内部不接触时,在恒力矩摆杆弹簧的弹力作用下,摆杆产生使刷板向外旋转的力矩,刷板向外旋转并展开;
在主辅式恒力弹簧组件作用下,刷板与马桶内壁不规则平面保持恒力接触,并在轴向位移内进行恒力伸缩和恒力移动,其中,所述主辅式恒力弹簧组件包括弹簧底座,弹簧底座上设置有刀型凸轮和滑杆,滑杆外侧安装有主弹簧,刀型凸轮上安装有辅弹簧;在主弹簧和辅弹簧作用下,刷板与马桶内壁不规则平面保持恒力接触,并在轴向位移内进行恒力伸缩和恒力移动;
在刷洗马桶底部排水口时,刷板在曲柄滑块组件作用下同时收缩,以与排水口相适应,其中,所述曲柄滑块组件包括滑环和连杆,滑环设置于主辅式恒力弹簧组件的外侧,连杆沿恒力矩摆杆固定轴圆周方向均匀分布且与刷板连接;
所述摆杆机构包括舵机,舵机为刷板的展开或收缩提供恒定的摆动力矩,以与马桶内壁不规则平面自适应。
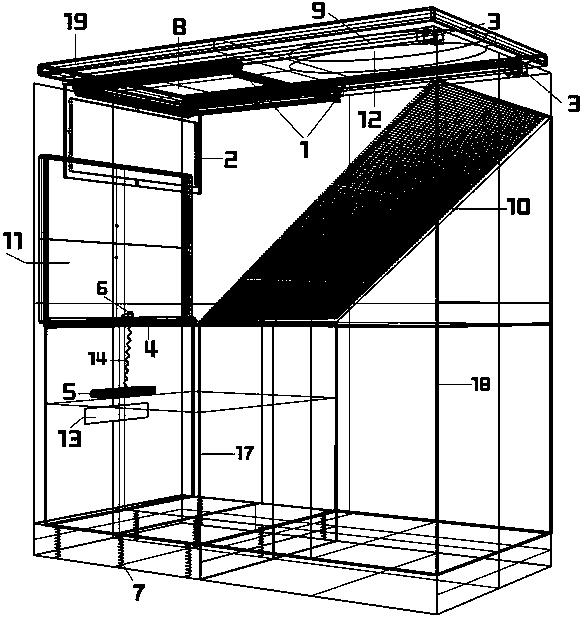
2.根据权利要求1所述的机器人,其中,所述旋转机构包括摆杆机构连接件,所述摆杆机构连接件与摆杆机构连接,旋转机构在驱动机构作用下通过摆杆机构连接件驱动摆杆机构转动,进而驱动恒力刷头在水平面内进行圆周运动。
3.根据权利要求1所述的机器人,其中,所述伸缩机构包括第一电动推杆和推杆驱动板,第一电动推杆的正负极与推杆驱动板的输出口相连;通过将第一电动推杆与推杆驱动板正接或反接,使得第一电动推杆伸长或收缩,进而控制恒力刷头在轴向范围内前后运动。
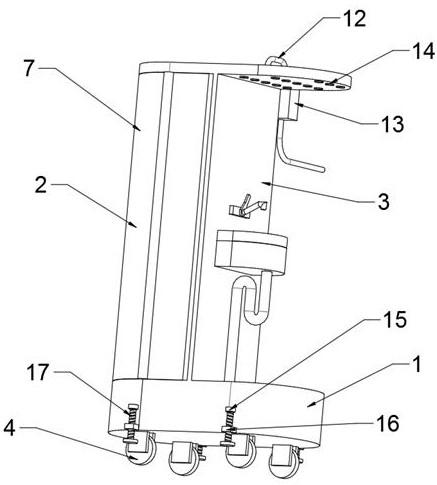
4.根据权利要求1所述的机器人,其中,所述升降机构包括升降驱动板、第二电动推杆、连接杆、套筒和推杆限位件;套筒套接在连接杆的外侧且与升降驱动板相连,套筒由第二电动推杆驱动沿连接杆上下滑动并带动恒力刷头在马桶内上下运动。
5.根据权利要求1所述的机器人,其中,所述驱动机构包括步进电机、步进电机驱动器和小电机;步进电机用于为旋转机构以及伸缩机构提供驱动力,小电机用于为恒力刷头提供自转驱动力,使恒力刷头在轴向范围内自转。
6.根据权利要求1所述的机器人,其中,所述机器人还包括控制机构,所述控制机构包括第一单片机、第二单片机和压力传感器;第一单片机用于对步进电机提供驱动指令,第二单片机用于对舵机提供驱动指令,压力传感器用于将主辅式恒力弹簧机构的压力信号反馈至第二单片机,第二单片机根据压力信号通过伸缩机构调节恒力刷头与马桶内壁的间距。
一种恒力自适应马桶清洁机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0