










专利摘要
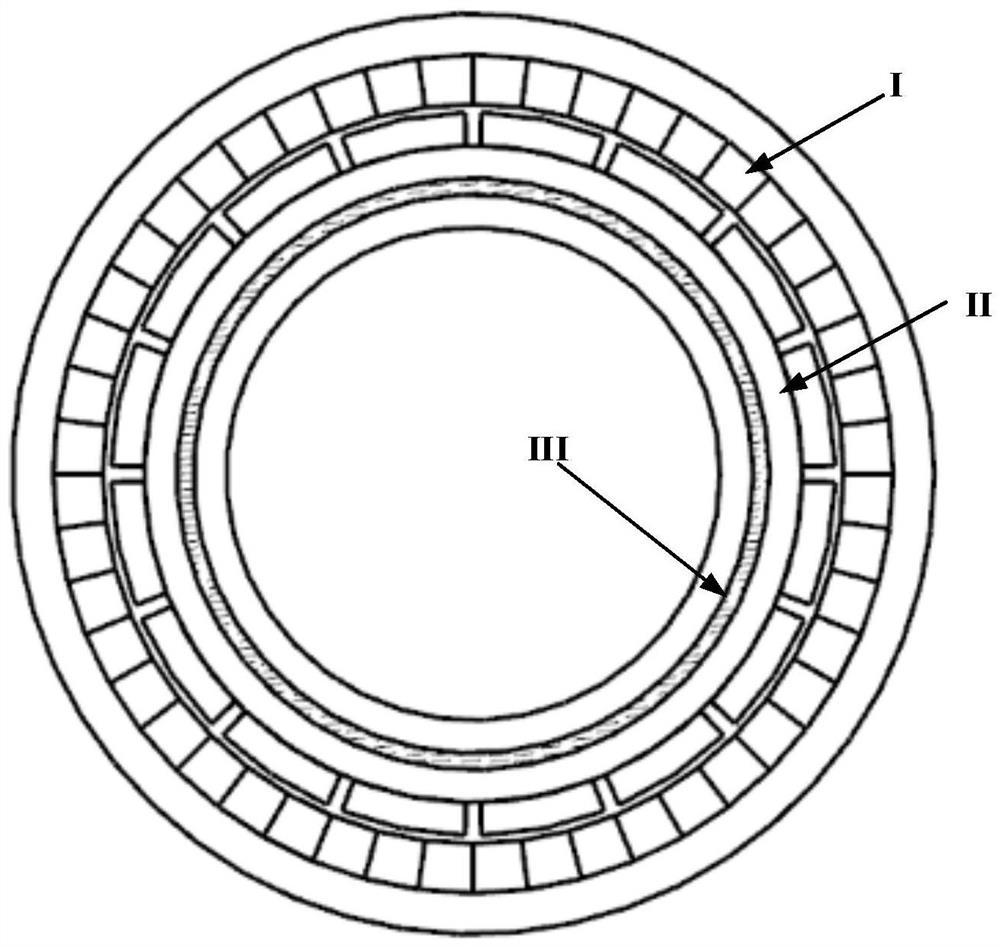
本发明公开了一种集成磁流体刹车的轮电机驱动器,包括定子(I)、转子(II)及磁流体结构(III)三部分,定子(I)位于最外圈,磁流体结构(III)位于中间,转子(II)位于定子(I)与磁流体结构(III)之间;永磁体由硬磁与软磁材料组成,通过定子线圈的脉冲电流可以控制软磁材料的磁场方向变换,实现电机正常运行与磁流体刹车阻尼运行模式之间的切换。磁流体部分为主转子另一侧,类似于单转子,双定子的结构,磁流体在磁铁与电磁线圈磁场的共同作用下改变其流体特性,起到阻尼与刹车的作用。整个新型电机实现了主动阻尼刹车与轮电机的一体化设计与控制,减少整体系统的部件和重量体积。
权利要求
1.一种集成磁流体阻尼刹车的轮电机驱动器,其特征在于,包括定子(I),转子(II)及磁流体结构(III),定子(I)位于最外圈,磁流体结构(III)位于中间,转子(II)位于定子(I)与磁流体结构(III)之间;定子和转子均采用大半径多极对数设计,所述的定子包括无齿槽铁芯(1)和定子绕组(2),定子绕组(2)位于无齿槽铁芯(1)内侧;所述的转子包括永磁体(3)和转子铁芯(4),永磁体(3)位于转子铁芯(4)的外侧;永磁体阵列采用海尔贝克阵列Halbach Array,永磁体阵列由硬磁材料和软磁材料共同组成;所述软磁材料和硬磁材料大小相同且交替放置,其中软磁材料采用交替径向充磁,硬磁材料采用交替切向充磁;其中软磁材料永磁体由定子线圈产生的脉动电流改变磁场方向,所述的磁流体结构由磁流体和铁芯组成,位于转子内侧,使磁场由气隙侧集聚转为磁流体侧集聚,进而形成对磁流体的粘滞力控制,不需要额外绕组来进行磁流体粘度控制。
2.根据权利要求1所述的一种集成磁流体阻尼刹车的轮电机驱动器,其特征在于,所述的磁流体结构(III)由磁流体(5)和磁流体铁芯(6)组成,整体位于转子内侧。
3.根据权利要求1所述的一种集成磁流体阻尼刹车的轮电机驱动器,其特征在于,所述的磁流体铁芯(6)部分和电机外壳侧板固定在一起。
4.根据权利要求1所述的一种集成磁流体阻尼刹车的轮电机驱动器,其特征在于,所述的转子铁芯(4)由高性能导磁材料叠压而成。
5.根据权利要求1所述的一种集成磁流体阻尼刹车的轮电机驱动器,其特征在于,所述的硬磁材料为具有高矫顽力的永磁体,软磁材料为具有低矫顽力的永磁体。
说明书
技术领域
本发明涉及一种集成磁流体刹车的轮电机驱动器,应用于电机与阻尼刹车的集成一体化设计与控制,减少整体系统的部件和重量,提高整体系统的控制特性,属于电机制造的技术领域。
背景技术
电机牵引拖动领域(汽车、船舶、飞机、风电、机器人以及医疗等)对于无齿轮电机直接驱动的研究在不断升温。无齿轮设计可以减少齿轮组集成带来的机械振动和散热问题,使整体系统更紧凑轻量化,性能也得到很大的提升。但是,没有减速齿轮就需要电机提供更大的转矩,对于电机的设计需要做一系列改动。轮电机通过转子多极大半径的设计,在不改变总体功率的基础上实现了低速大转矩的输出,十分有利于如汽车、船舶及机器人领域的应用。轮电机的最早应用实在船舶电力推进领域,轮电机继承了螺旋桨,实现了推进器的一体化设计,从而减少了以前由于较长的传动轴带来的机械振动问题,也免去了齿轮箱等传动系统带来的维护成本。
在电动汽车领域,国内外专家一直在研究除传统集中式动力总成系统以外的传动系统,其中,分布式轮毂或轮边电机驱动系统得到了广泛的关注。尤其在低速电动车领域,轮毂及轮边电机的简单架构可以极大地满足该领域对于低成本的需求。另外,除了成本及性能优势外,分布式电驱系统也可以实现ABS刹车或路载的变化下,通过对多个分布电机进行单独的摸式及转矩控制,实现对车身振动的抑制及稳定性的优化调节。
齿轮箱的减少优化了整体系统的重量和性能,但是刹车及阻尼减震系统还是作为一个独立的部件后期加在轮电机驱动上。集成刹车阻尼减震系统可以进一步完成对整个系统的优化,实现真正的驱动制动一体化设计及控制。这个需求对于最近新兴的基于柔性关节驱动的机器人与人协作一体化系统尤为重要。齿轮箱的减少会减少柔性关节机器人的转动惯量,能大大提高其与人协作情况下的安全性。然而,缺乏主动或被动的阻尼系统,还是会在与人协作的过程中带来一定的安全性问题。因此,本发明提出一种集成磁流体阻尼刹车的轮电机驱动系统,减少整体驱动系统的体积重量,并且增加机器人的柔性度,真正实现其与人协作过程中的安全控制。
发明内容
技术问题:为了进一步实现电驱系统的集成轻量化和制动驱动一体化设计与控制,本发明提出一种集成磁流体刹车的轮电机驱动器。本发明通过软磁材料的极性改变来实现磁场在电机气隙侧与磁流体侧的切换,不需要额外绕组来进行磁流体粘度控制,最大程度上完成了整体系统的高度集成一体化。
技术方案:本发明提出一种集成磁流体刹车的轮电机驱动器。定转子采用多极大外径设计,实现低速大转矩。定子采用无齿槽设计,尽可能减少厚度,进而减少整体体积。转子侧采用海尔贝克阵列(Halbach Array)磁铁设计,增加磁场在电机气隙侧的集中度,弥补无齿槽带来的有效气隙的增加。转子磁铁由硬磁和软磁材料共同组成,其中软磁材料通过定子绕组脉冲电流改变磁场方向,实现在电机正常运行与磁流体阻尼刹车控制模式之间的实时快速切换。磁流体及导磁铁芯在转子内侧,通过磁铁和定子电磁线圈的磁场作用改变磁流体粘度,实现阻尼及刹车控制。
本发明的一种集成磁流体阻尼刹车的轮电机驱动器,包括定子、转子及磁流体结构三部分,定子位于最外圈,磁流体结构位于中间,转子位于定子与磁流体结构之间;定子和转子均采用大半径多极对数设计,所述的定子包括无齿槽铁芯和定子绕组,定子绕组位于无齿槽铁芯内侧;所述的转子包括永磁体(和转子铁芯,永磁体位于转子铁芯的外侧;永磁体阵列采用海尔贝克阵列Halbach Array,永磁体阵列由硬磁材料和软磁材料共同组成;其中软磁材料永磁体由定子线圈产生的脉冲电流改变磁场方向,所述的磁流体结构由磁流体和铁芯组成,位于转子内侧。
其中,所述的磁流体结构由磁流体和磁流体铁芯组成,整体位于转子内侧。
所述的磁流体铁芯部分和电机外壳的侧板固定在一起。
所述的转子铁芯由高性能导磁材料叠压而成。
所述的硬磁材料为具有高矫顽力的永磁体,软磁材料为具有低矫顽力的永磁体。
有益效果:本发明的电机为新型集成磁流体阻尼刹车的轮电机驱动器,并且采用无齿槽定子铁芯、由硬磁和软磁材料组成的海尔贝克阵列永磁体,同时磁流体铁芯与电机外壳固定,磁流体位于转子内侧与磁流体铁芯之间。因此,本发明具有如下优点:电机采用无齿槽定子铁芯,降低定子厚度,减少电机的转矩波动;定转子采用多极对数大半径设计,实现不需要齿轮组的低速大转矩直驱,使得整套系统更加紧凑;转子永磁体采用海尔贝克阵列(Halbach Array),实现永磁体磁场的集聚效应,减少漏磁影响;永磁体由硬磁与软磁材料组成,其中软磁材料可以由定子线圈产生的脉冲电流实时改变磁场方向;改变磁场方向的永磁体磁场和定子线圈产生的磁场形成组合,使得合成的磁场通过磁流体改变其粘度特性,实现不需要额外线圈的磁流体阻尼和刹车的实时控制。以上的设计使得整套系统不需要独立的齿轮组和刹车部件,变得更加紧凑。
附图说明
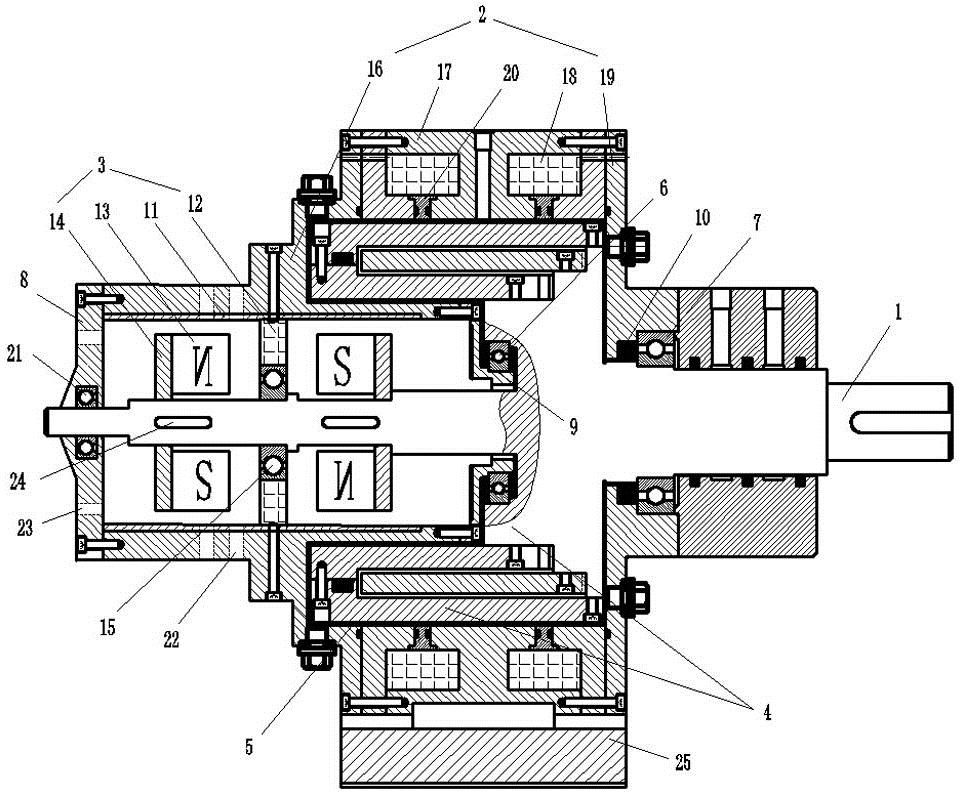
图1为本发明的电机分解示意图;
图2为本发明的电机平面示意图;
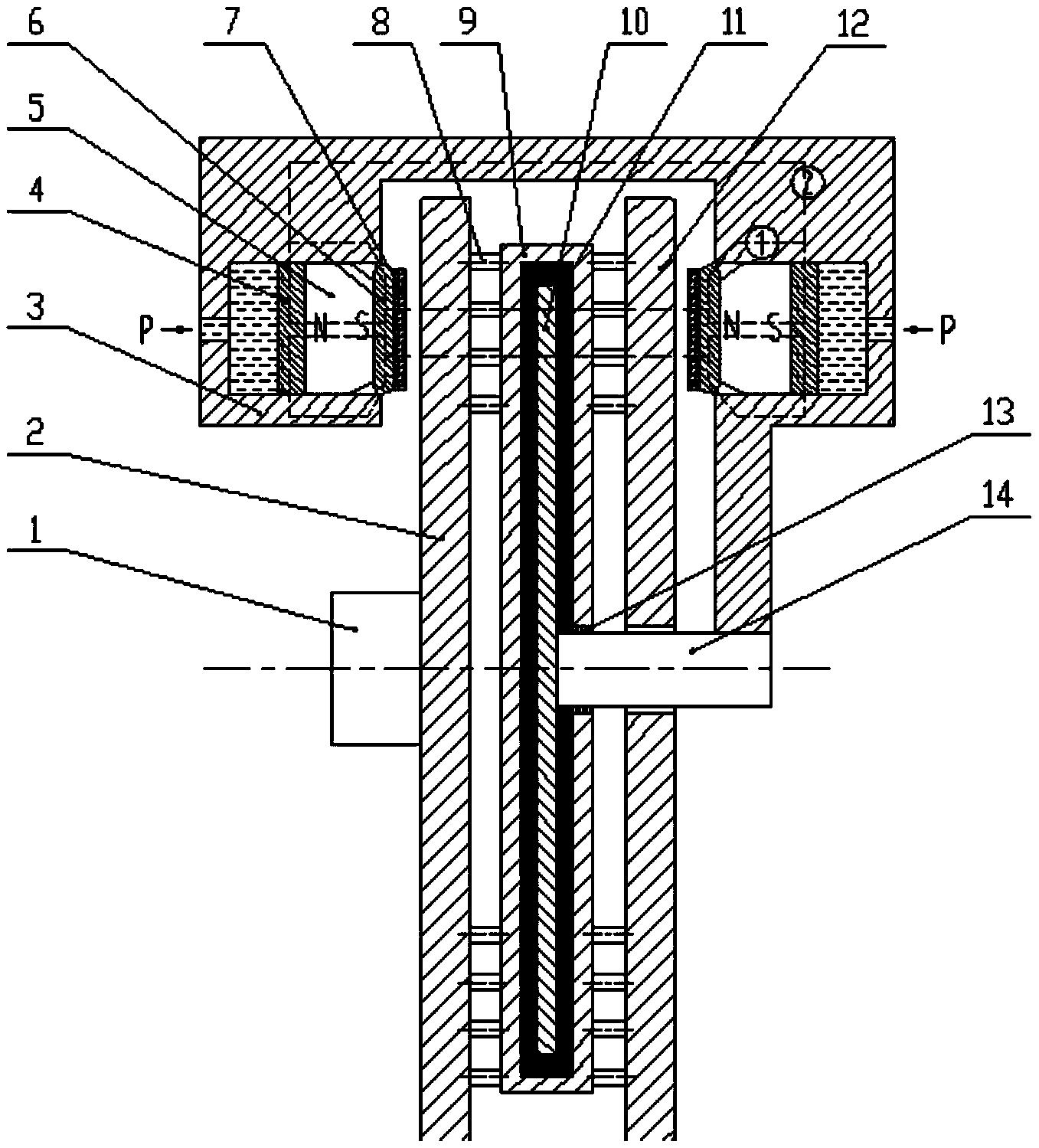
图3为本发明的定子部分平面示意图;
图4为本发明的转子部分平面示意图;
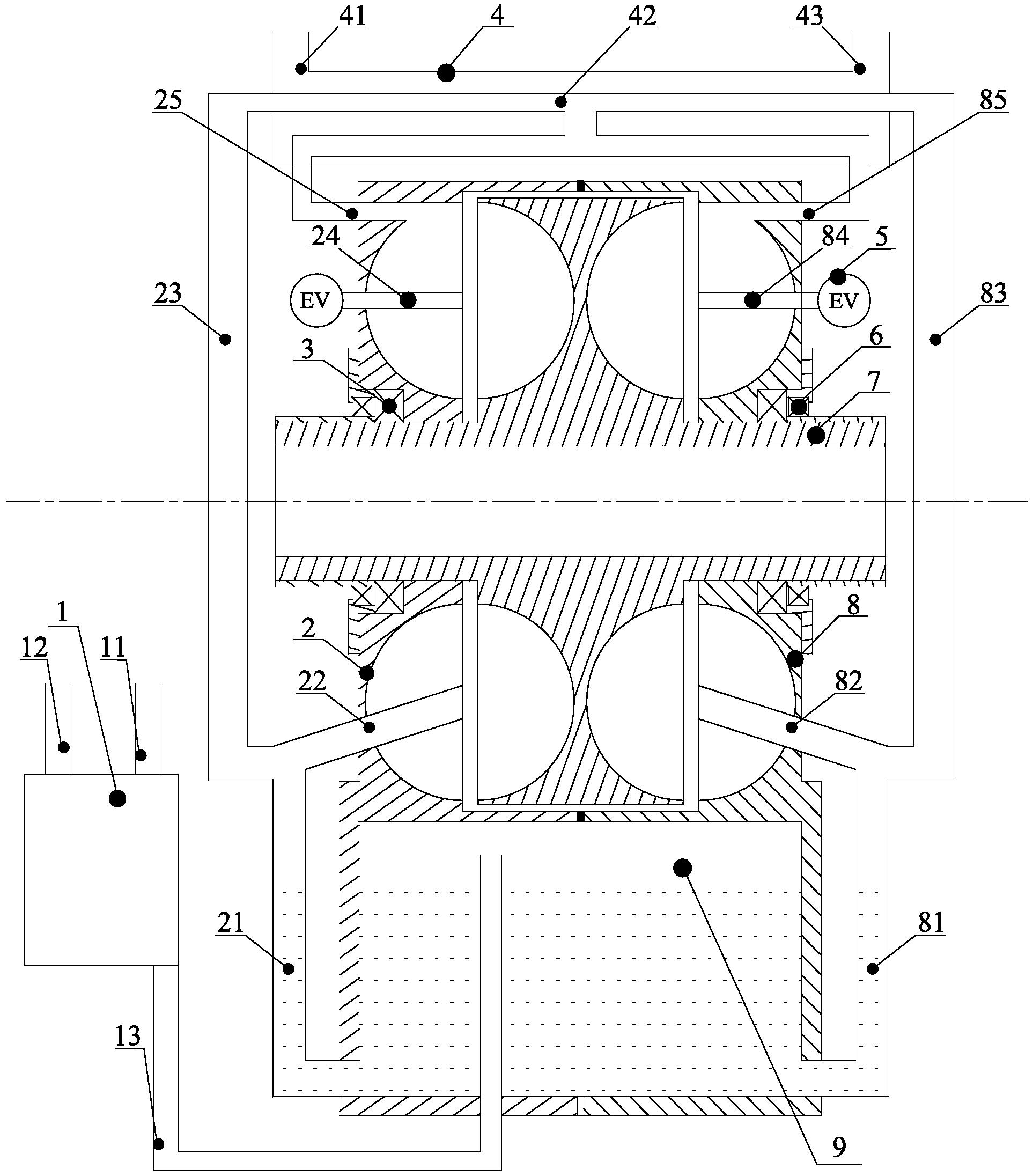
图5为本发明的磁流体部分平面示意图;
图6为本发明的永磁体一极平面示意图。
图中有:定子I、转子II、磁流体III;定子无齿槽铁芯1、定子绕组2、永磁体结构3、转子铁芯4、磁流体5、磁流体铁芯6。
具体实施方式
本发明公布的集成磁流体刹车的轮电机驱动器分定子、转子及磁流体三部分。
所述的集成磁流体刹车的轮电机驱动器,定子部分采用无齿槽设计,减少定子厚度。
所述的集成磁流体刹车的轮电机驱动器,转子采用大半径多极永磁体设计,实现低速高转矩运行。永磁体采用海尔贝克阵列(Halbach Array),增加磁场在磁铁单侧的集聚效应,减少在另一侧的漏磁。应用此设计,在电机正常运行模式下,磁场会集中在气隙侧,不会改变磁流体侧的粘度特性。永磁体采用软磁与硬磁材料相结合的设计,软磁材料在定子线圈产生的脉冲电流作用下可以实现磁场方向的反转,使磁场由气隙侧集聚转为磁流体侧集聚,进而形成对磁流体的粘滞力控制,使电机切换到磁流体阻尼刹车运行模式。
所述的集成磁流体刹车的轮电机驱动器,其具体实施方式如图1和图2所示,主要包括定子I、转子II和磁流体III三部分。
定子部分如图3所示,由定子无齿槽铁芯1和定子绕组2组成。
转子部分如图4所示,由永磁体3和转子铁芯4构成。
磁流体部分如图5所示,由磁流体5和磁流体铁芯6构成。
所述的集成磁流体刹车的轮电机驱动器,该电机在轮电机上集成了磁流体阻尼刹车,实现了无齿轮组无额外刹车部件的电机直驱系统,使得整体系统更加紧凑。同时,不需要额外的磁流体阻尼控制线圈,实现了电机的驱动制动一体化控制。
所述的集成磁流体刹车的轮电机驱动器,采用无齿槽定子铁芯设计,减少定子铁芯厚度,降低电机的转矩脉动,,提高电机运行的平稳性。
所述的集成磁流体刹车的轮电机驱动器,其中定转子与定子无齿槽铁芯1、转子铁芯4、磁流体铁芯6由高性能导磁材料叠压而成,如十号钢或硅钢片等;定子线圈采用铜材料,导电性好且导热系数大。
所述的集成磁流体刹车的轮电机驱动器,转子采用大半径多极对数永磁体设计,永磁体采用海尔贝克阵列(Halbach Array)设计,实现磁场的集聚,减少漏磁,并且在电机运行状况下,不会改变转子另一侧磁流体阻尼特性;永磁体材质由硬磁(高矫顽力永磁体,如钕铁硼等)与软磁(低矫顽力永磁体,如铁氧永磁体)材料组合而成。其中,软磁永磁体可以在定子线圈产生的脉冲电流作用下实现磁场方向的逆转,完成此电机在正常转矩运行模式与磁流体阻尼刹车模式下的切换(见图6)。
所述的集成磁流体刹车的轮电机可应用于汽车及机器人驱动,实现制动驱动一体化设计与控制,尤其在人机协作的柔性机器人关节上可以有很大的应用,增加其与人协作中的安全性。
一种集成磁流体刹车的轮电机驱动器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0