







专利摘要
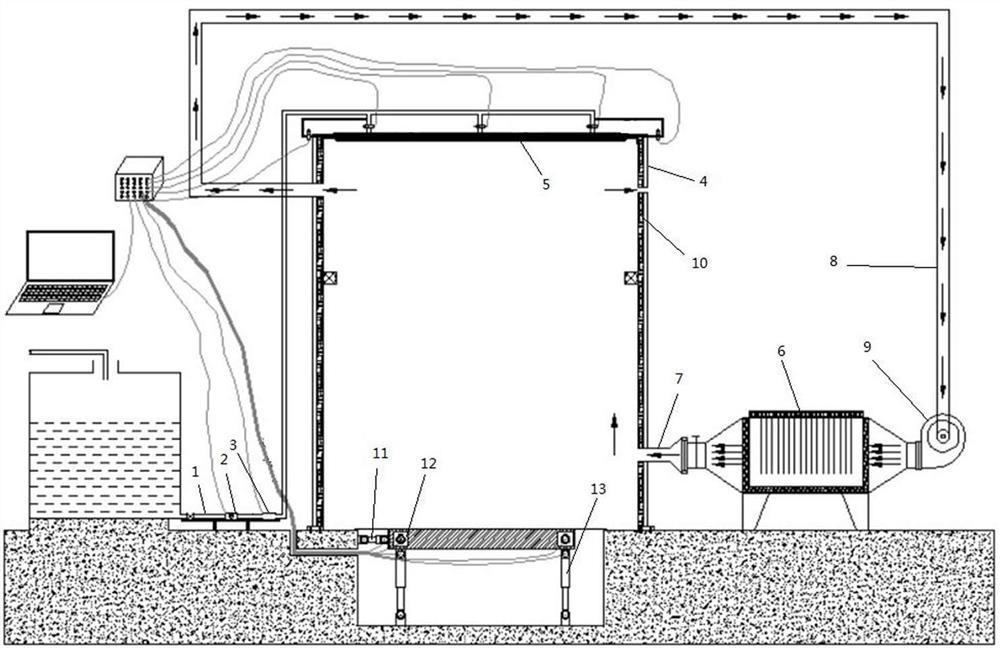
本实用新型公开了一种脊柱骨骼肌的体外仿生力学测试系统,包括:仿生力学加载装置对脊柱样本产生预紧力,还原脊柱样本的在体力学环境;机械臂驱动装置驱动脊柱样本进行六自由度仿生功能动作;力学测量装置用于测量功能动作或平衡位姿下肌腱上的反馈力;工控机控制装置驱动仿生力学加载装置对脊柱样本产生预紧力;控制机械臂驱动装置驱动脊柱样本进行各种仿生动作,接收力学测量装置测量的反馈力值,并利用动作捕捉装置获取脊柱样本的运动学数据。本实验平台适用于各种脊柱离体实验的手术规划和相关医疗器械的力学测试。
权利要求
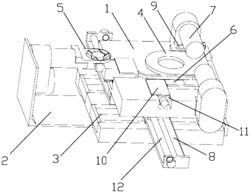
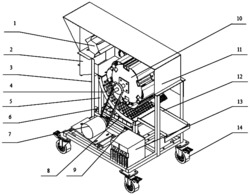
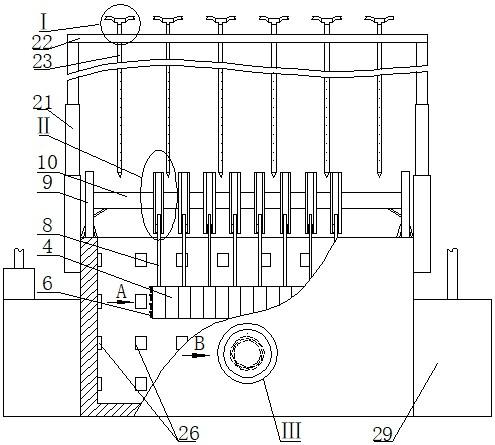
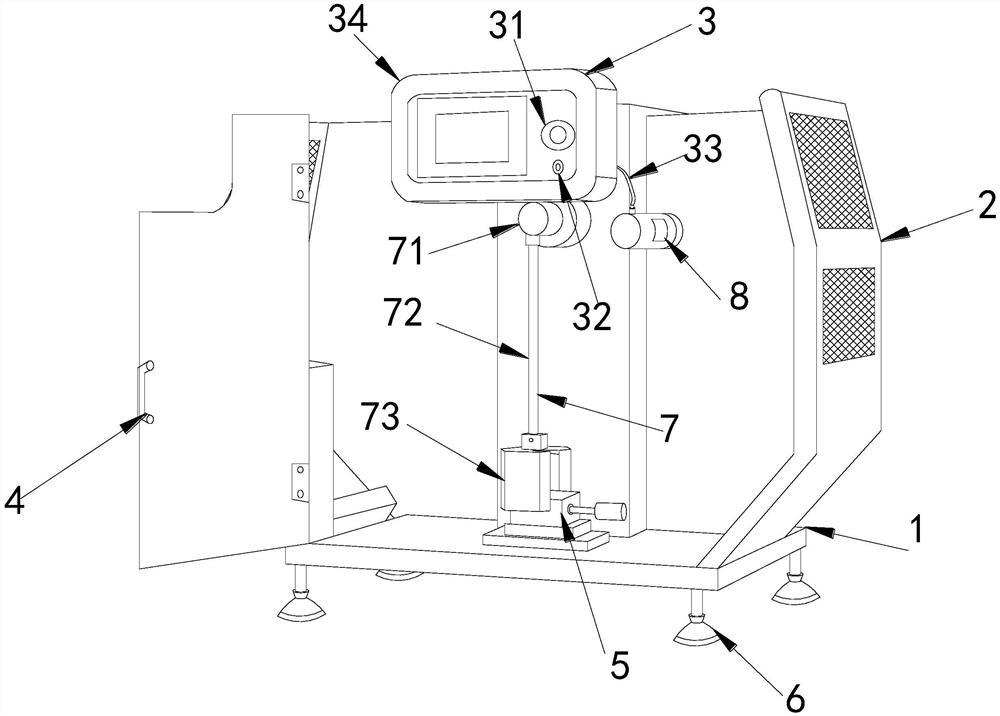
1.一种脊柱骨骼肌的体外仿生力学测试系统,其特征在于,包括试验台、仿生力学加载装置、机械臂驱动装置、力学测量装置、工控机控制装置、动作捕捉装置、脊柱样本以及若干人工肌腱;
所述试验台,用于固定实验用的脊柱样本;脊柱样本包括若干椎体,脊柱样本表面设有若干人工肌腱;
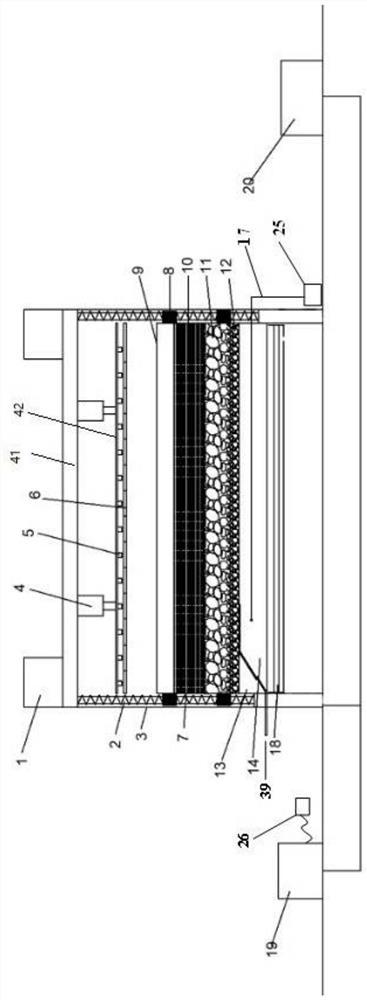
所述仿生力学加载装置,穿设于各人工肌腱,并固定连接到脊柱样本上的肌腱附着点或椎体矢状面旋转中心,接收到控制指令后,对脊柱样本产生预紧力,通过产生的预紧力还原脊柱样本的在体力学环境;
所述机械臂驱动装置,连接脊柱样本顶端,驱动脊柱样本进行六自由度仿生功能动作;
所述力学测量装置,测量脊柱样本进行功能动作或平衡位姿时,肌腱上的反馈力值;
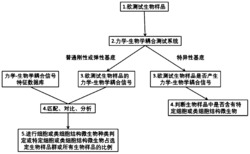
所述工控机控制装置分别与所述仿生力学加载装置、所述机械臂驱动装置、所述力学测量装置以及所述动作捕捉装置信号连接;所述工控机控制装置内置运动控制卡,基于LabVIEW驱动所述仿生力学加载装置对脊柱样本产生预紧力,基于MATLAB控制所述机械臂驱动装置驱动脊柱样本进行各种仿生功能动作,利用所述力学测量装置获取各连接各肌腱附着点受到的仿生力学数据,利用所述动作捕捉装置获取脊柱样本进行仿生功能动作时的运动学数据。
2.如权利要求1所述的系统,其特征在于,所述仿生力学加载装置包括多组驱动装置和牵引线;所述牵引线的两端分别连接所述驱动装置以及脊柱样本;所述驱动装置在接收到控制指令后,通过调节各所述驱动装置驱动所述牵引线对脊柱样本产生预紧力,还原脊柱样本的在体力学环境。
3.如权利要求2所述的系统,其特征在于,所述力学测量装置用于测量所述牵引线对脊柱样本上的肌腱附着点产生的预紧力值;当所述机械臂驱动装置驱动脊柱样本处于中立位平衡状态时,将测量的预紧力值定义为初始预紧力值;当所述机械臂驱动装置驱动脊柱样本处于预期的仿生功能动作时,将测量的预紧力值定义为动态预紧力值;后根据初始预紧力值以及动态预紧力值,获取人工肌腱对脊柱样本的仿生力学数据。
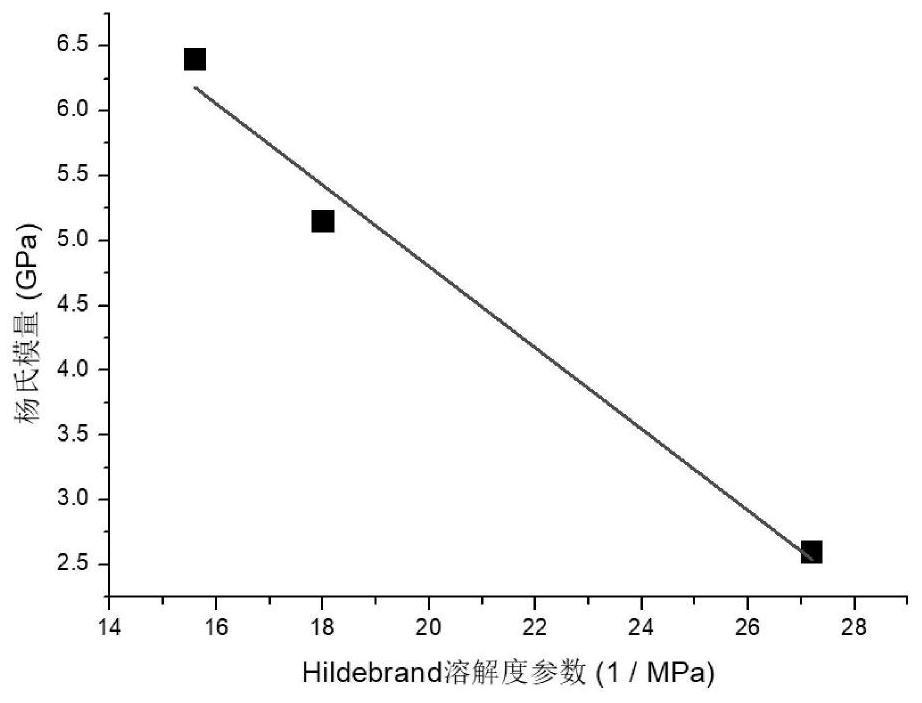
4.如权利要求2所述的系统,其特征在于,所述牵引线包括8根;其中2根所述牵引线的一端在穿设对应的人工肌腱后,通过脊柱样本的各个椎体,连接矢状面旋转中心,另一端连接所述驱动装置;另外6根所述牵引线的一端在穿设对应人工肌腱后,连接脊柱样本上的肌腱附着点,另一端连接所述驱动装置;人工肌腱采用与各生物肌腱力学性质相同的肌腱材料,包括仿生腹直肌和仿生竖脊肌。
5.如权利要求4所述的系统,其特征在于,所述驱动装置包括步进电机和电机驱动器,所述电机驱动器与所述步进电机、所述工控机控制装置信号连接;所述步进电机连接所述牵引线。
6.如权利要求3所述的系统,其特征在于,所述力学测量装置包括力传感器、信号调理器以及信号采集卡;
所述信号调理器与所述力传感器以及所述信号采集卡信号连接;所述力传感器的数量与所述牵引线匹配,设于所述牵引线上;所述力传感器采集所述牵引线上产生的预紧力值,经过所述信号调理器处理后,利用所述信号采集卡,传输给所述工控机控制装置。
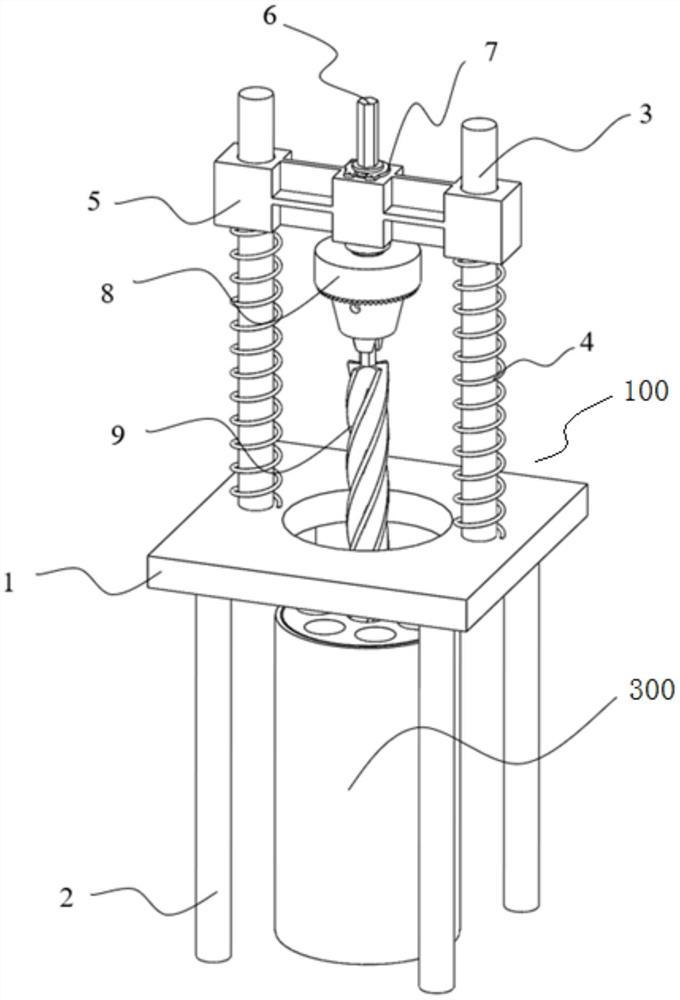
7.如权利要求1所述的系统,其特征在于,所述试验台至少包括基座以及安装在所述基座上的支撑装置;所述支撑装置由下至上依次包括底板、托台支柱、托台以及支撑夹具。
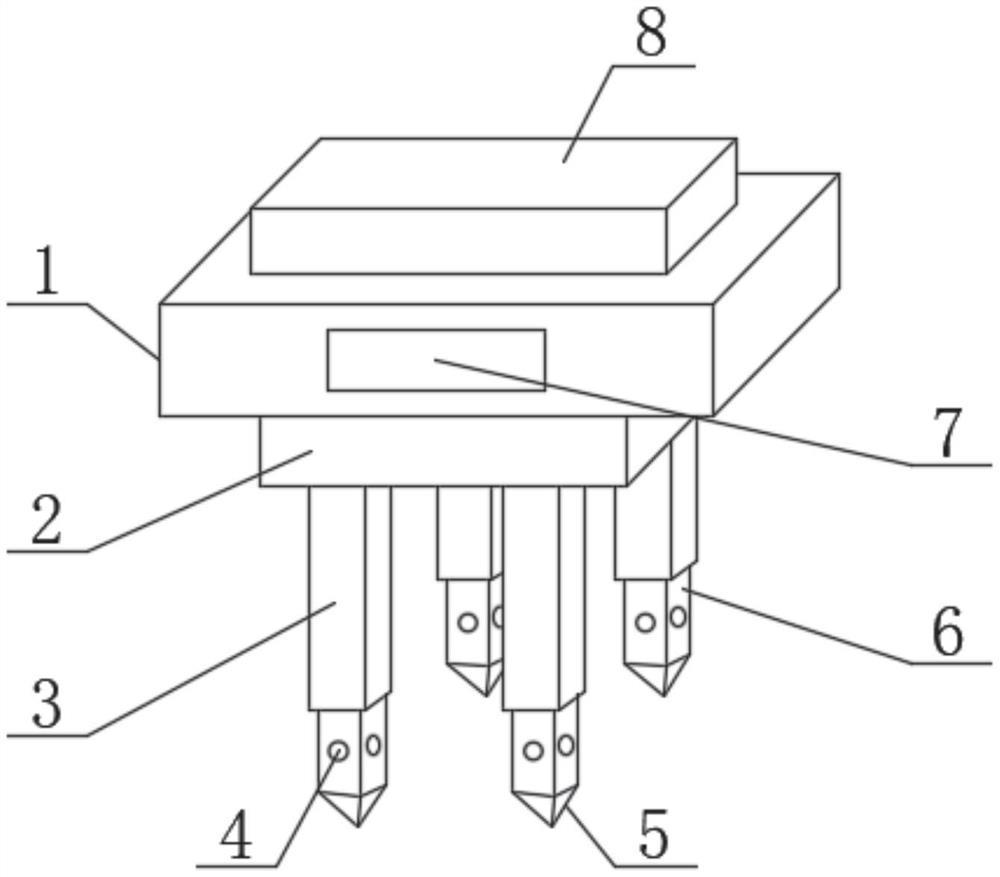
8.如权利要求1所述的系统,其特征在于,所述机械臂驱动装置包括机械臂本体、力规以及机械臂夹具,所述力规通过螺栓分别与所述机械臂本体以及所述机械臂夹具刚性连接。
一种脊柱骨骼肌的体外仿生力学测试系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0