











专利摘要
本实用新型属于仪器仪表技术领域,具体涉及一种船用风向风速传感器及其补偿方法。新型船用风向风速传感器,包括风速测量装置、风向测量装置、控制主板及位移传感单元;所述位移传感单元用于获取船舶的运动状态,并传给所述控制主板;所述控制主板用于接收风速测量装置、风向测量装置测量的初始风速和风向数据,并对接收的初始风速和风向数据进行补偿修正。本实用新型通过优化设计风速风向传感器,设置位移传感单元,感知传感器运动姿态,大幅提高传感器风速测量精度;并且通过采用磁敏电阻为敏感元件,以磁场为媒介将机械角度、角位移转化为电信号的方法提高风向测量精度和分辨率。
权利要求
1.一种新型船用风向风速传感器,其特征在于:包括风速测量装置、风向测量装置、控制主板及位移传感单元;所述位移传感单元用于获取船舶的运动状态,并传给所述控制主板;所述控制主板用于接收风速测量装置、风向测量装置测量的初始风速和风向数据,并对接收的初始风速和风向数据进行补偿修正。
2.根据权利要求1所述的新型船用风向风速传感器,其特征在于:所述风速测量装置包括风速传动轴、测速线圈和磁钢;所述风速传动轴的前端连接螺旋桨,其后端连接磁钢;所述测速线圈与控制主板通讯连接;所述测速线圈与所述磁钢配合,测量初始风速。
3.根据权利要求1所述的新型船用风向风速传感器,其特征在于:所述的风向测量装置包括风向驱动器和角度传感器;所述风向驱动器与角度传感器通过联轴器连接;所述角度传感器与所述控制主板连接;所述风向驱动器驱动所述的角度传感器,进行风向的测量。
4.根据权利要求3所述的新型船用风向风速传感器,其特征在于:所述的风向驱动器包括风向连接器,及连接所述风向连接器的风向传动轴;所述风向连接器转动连接尾翼。
5.根据权利要求3所述的新型船用风向风速传感器,其特征在于:所述的角度传感器为电位式角度传感器。
说明书
技术领域
本实用新型属于仪器仪表技术领域,具体涉及一种船用风向风速传感器。
背景技术
风作为一种自然现象,其蕴藏着巨大的能量,能对人类活动产生重大影响,尤其是对海洋资源开发。船舶作为海洋资源开发的主要载具,其航行安全受风影响颇大。因此,对于海洋航行中的船舶,需要在航行过程中的实时测量风速风向参数,为船舶的操纵控制和航行安全提供信息,但是船舶的航速、航向、运动姿态以及海洋上的各种海流等诸多因素,均会对风速、风向的测量精度产生影响,尤其是对于某些特殊要求的风帆助力船舶,非常注重风能的最大利用率,因而要求风速、风向的测量精度非常高。
现有的风速风向仪是按照空气水平流动的前提设计的,且只考虑静态下的风向风速测量。例如,专利号为201510966427.1的实用新型专利公布了一种风向风速传感器,实现了对风向风速的测量;专利号为201610255232.0的实用新型专利公布了一种风速风向传感器及风速风向计算方法,也实现了对风向风速的测量。
船舶作为搭载传感器的平台,其本身处于时刻运动状态,由于传感器迎风角度的时变性的特点,所以普通风向风速仪用在船舶上时,均无法补偿因船舶航行时纵倾、横摇等因素造成的测量误差,影响风向、风速测量精度。且目前主流的风向测量主要采用码盘来实现,但是码盘的分辨率较低,一般仅能做到5°的分辨率,使得传感器测量风向误差较大。
针对船舶摇摆状态下风速风向的精确测量,目前尚无专用测量设备及方法。
实用新型内容
本实用新型的目的是解决由于风、浪、流等环境因素的干扰,船舶时刻处于运动状态,传感器随船运动造成的风速测量误差较大的问题,以及现有传感器码盘的分辨率较低,风向测量误差大的问题,提供一种新型的船用自校准风向风速传感器。
为了实现上述目的,本实用新型提供的技术方案是:一种新型船用风向风速传感器,包括风速测量装置、风向测量装置、控制主板及位移传感单元;所述位移传感单元用于获取船舶的运动状态,并传给所述控制主板;所述控制主板用于接收风速测量装置、风向测量装置测量的初始风速和风向数据,并对接收的初始风速和风向数据进行补偿修正。
作为本实用新型的一种优选方式,所述风速测量装置包括风速传动轴、测速线圈和磁钢;所述风速传动轴的前端连接螺旋桨,其后端连接磁钢;所述测速线圈与控制主板通讯连接;所述测速线圈与所述磁钢配合,测量初始风速。
作为本实用新型的一种优选方式,所述的风向测量装置包括风向驱动器和角度传感器;所述风向驱动器与角度传感器通过联轴器连接;所述角度传感器与所述控制主板连接;所述风向驱动器驱动所述的角度传感器,进行风向的测量。
进一步地,所述的风向驱动器包括风向连接器,与所述风向连接转动连接的尾翼,及连接所述角度传感器的风向传动轴。
进一步地,所述的角度传感器为电位式角度传感器。
本实用新型通过优化设计风速风向传感器,设置位移传感单元,感知传感器运动姿态,对测量风速的补偿修正,大幅提高传感器风速测量精度;并且通过采用磁敏电阻为敏感元件,以磁场为媒介将机械角度、角位移转化为电信号的方法提高风向测量精度和分辨率。
附图说明
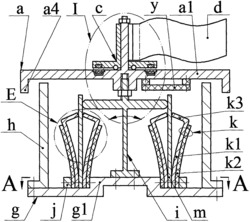
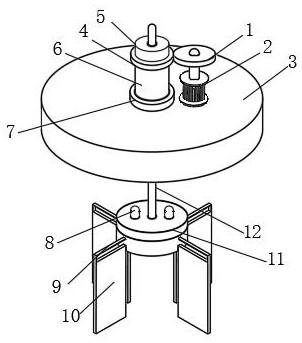
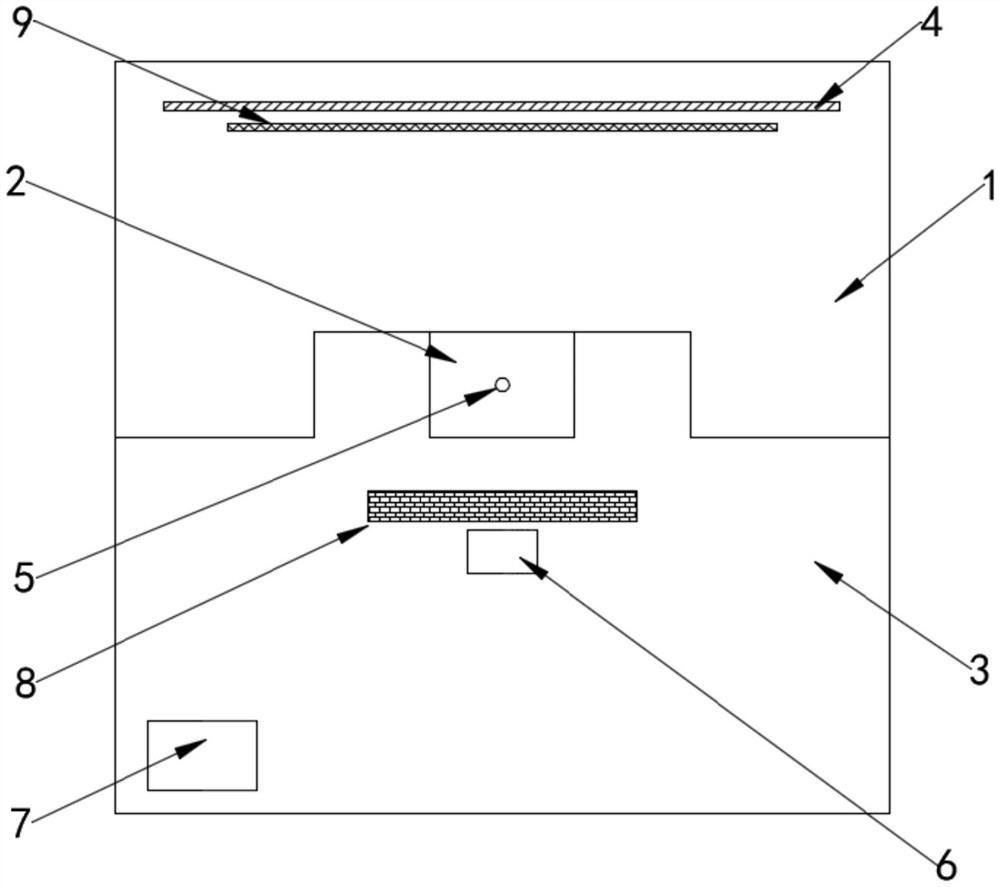
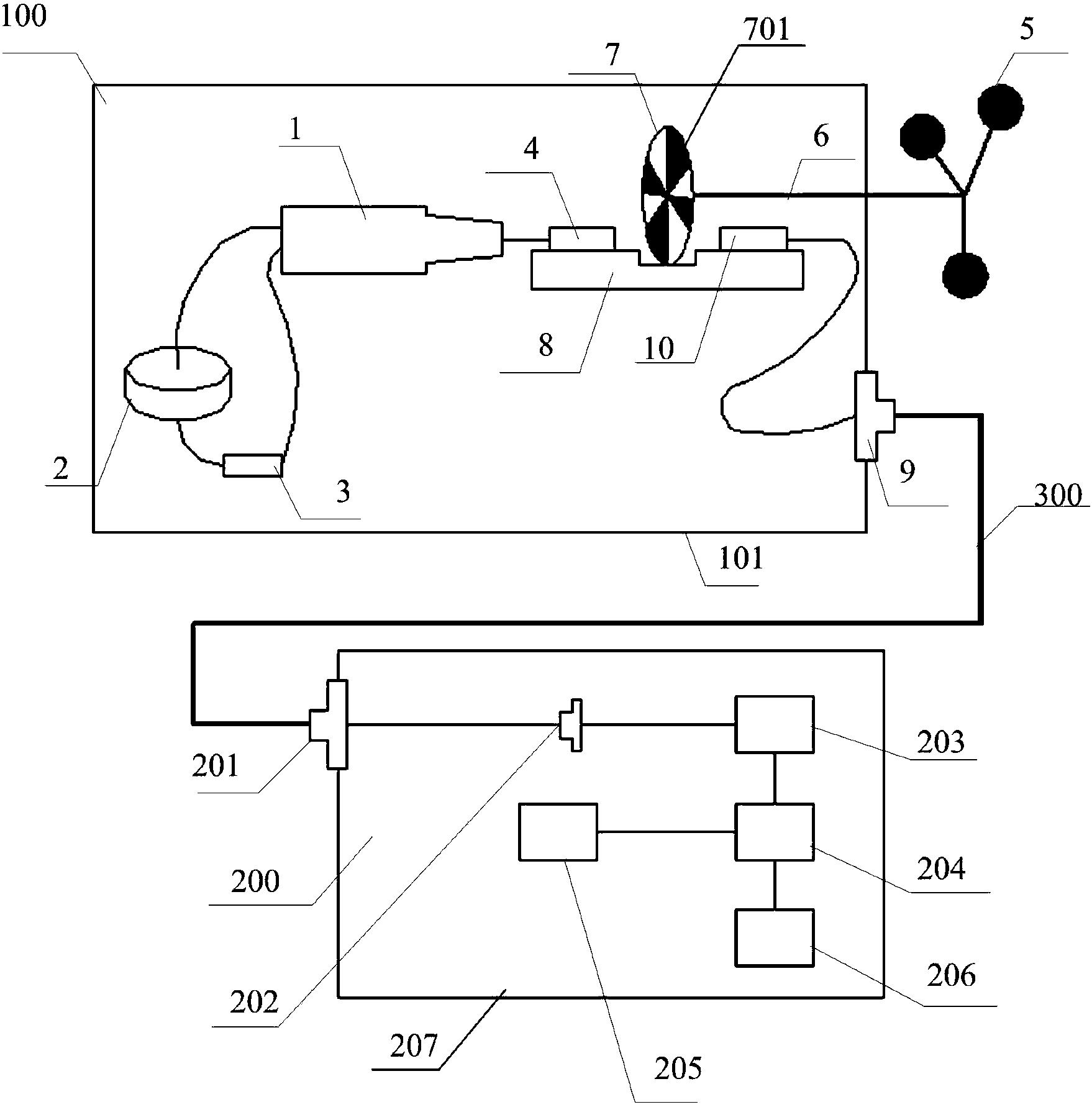
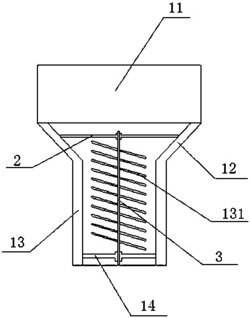
图1是本实用新型实施例的新型船用风向风速传感器剖面图。
具体实施方式
下面结合附图和实施例对本实用新型的技术方案进行详细的阐述和说明,但本实用新型的技术方案并不限于所列举的具体实施例记载的范围。
本实用新型提供的其中一个实施例是:一种新型船用风向风速传感器,其结构如图1所示,包括:包括壳体1、螺旋桨2、尾翼3、控制主板13。壳体1的下端固定在底座14上,壳体1前端设置螺旋桨2,中后端设置尾翼3,壳体1内部采用三通结构。尾翼3作为风向标,使传感器时刻保持螺旋桨2迎风。螺旋桨2通过自紧螺母固定在风速传动轴7上,风速传动轴7的另一端与磁钢4刚性连接,并且在风向传动轴9上固定测速线圈5,测速线圈5与控制主板13通讯连接,测速线圈5与磁钢4配合,实现风速的初始测量。
在壳体1内部安装位移传感单元6,位移传感单元6感知船体的运动情况,并将测量数据实时传递给控制主板13,控制主板13通过补偿算法,计算补偿量,补偿风速测量值。
尾翼3与风向连接器8转动相连,风向连接器8与风向传动轴9连接,风向传动轴9通过联轴器10与角度传感器12的角度轴11连接,角度传感器12又与控制主板13连接,实现风向的测量。
角度传感器12为电位式角度传感器,采用磁敏电阻为敏感元件,以磁场为媒介将机械角度、角位移转化为电信号传给控制主板13。
控制主板13中写有风速补偿算法,通过对初始风速进行修正补偿后,输出精确的风速及风向值。
本实施例中,传感器的风速测量是基于霍尔原理测量相对风速,并根据位移传感单元获取的船舶位置、角度信息,通过控制主板修正因船舶运动的影响而产生的测量误差。通过采用磁敏电阻为敏感元件,以磁场为媒介将机械角度、角位移转化为电信号的方法提高风向测量精度和分辨率。
一种新型船用风向风速传感器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0