









专利摘要
本实用新型公开了属于空间电磁场检测技术领域的一种三维光学矩阵通道电磁场移动扫描测量系统。包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统。采用三维磁光效应和三维电光效应,能够在三维上同时测量空间磁场和电场;能够实现空间电磁场的三维重现;采用完全的光学元件和光学传感材料,对于空间电场和磁场不产生扰动,测量得到的数据是完全真实的;能够测量微小点的磁场和电场。
权利要求
1.一种三维光学通道电磁场移动扫描测量系统,包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统,其特征在于,三维光学矩阵通道磁场移动扫描测量系统为三维磁场矩阵通道光学传感单元(23)安置于三维移动和位置数据输出平台(25)的光学传感支撑杆(26)上,三维移动和位置数据输出平台(25)由光学传感支撑杆(26)、X轴导轨(27)、X轴电动移动和位置数据输出模块(28)、Y轴导轨(29)、Y轴电动移动和位置数据输出模块(30)、Z轴导轨(31)和Z轴电动移动和位置数据输出模块(32)组合而成,其中X轴导轨(27)和X轴电动移动和位置数据输出模块(28)安置于Y轴导轨(29)和Y轴电动移动和位置数据输出模块(30)之上,Z轴导轨(31)和Z轴电动移动和位置数据输出模块(32)安置于X轴导轨(27)和X轴电动移动和位置数据输出模块(28)之上,零磁场屏蔽空腔(24)安装于空腔支撑座(42)上,零磁场屏蔽空腔(24)安置于被测磁场的外部边缘处,三维移动和位置数据输出平台(25)通过传输电缆与位置数据处理单元(34)连接,位置数据处理单元(34)通过USB接口与工业控制机计算机(35)连接,三维磁场矩阵通道光学传感单元(23)的输入接口通过光纤(33)与智能调制矩阵功率光源(14)连接,三维磁场矩阵通道光学传感单元(23)的输出接口通过光纤(33)与三维电磁场光学信息单元(15)连接,三维电磁场光学信息单元(15)通过USB接口与工业控制机计算机(35)连接。
2.一种三维光学通道电磁场移动扫描测量系统,包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统,其特征在于,三维光学单通道磁场移动扫描测量系统为三维磁场单通道光学传感单元(16)安置于三维移动和位置数据输出平台(25)的光学传感支撑杆(26)上,三维移动和位置数据输出平台(25)由光学传感支撑杆(26)、X轴导轨(27)、X轴电动移动和位置数据输出模块(28)、Y轴导轨(29)、Y轴电动移动和位置数据输出模块(30)、Z轴导轨(31)和Z轴电动移动和位置数据输出模块(32)组合而成,其中X轴导轨(27)和X轴电动移动和位置数据输出模块(28)安置于Y轴导轨(29)和Y轴电动移动和位置数据输出模块(30)之上,Z轴导轨(31)和Z轴电动移动和位置数据输出模块(32)安置于X轴导轨(27)和X轴电动移动和位置数据输出模块(28)之上,零磁场屏蔽空腔(24)安装于空腔支撑座(42)上,零磁场屏蔽空腔(24)安置于被测磁场的外部边缘处,三维移动和位置数据输出平台(25)通过传输电缆与位置数据处理单元(34)连接,位置数据处理单元(34)通过USB接口与工业控制机计算机(35)连接,三维磁场单通道光学传感单元(16)的输入接口通过光纤(33)与智能调制矩阵功率光源(14)连接,三维磁场单通道光学传感单元(16)的输出接口通过光纤(33)与三维电磁场光学信息单元(15)连接,三维电磁场光学信息单元(15)通过USB接口与工业控制机计算机(35)连接。
3.一种三维光学通道电磁场移动扫描测量系统,包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统,其特征在于,三维光学矩阵通道电场移动扫描测量系统为三维电场矩阵通道光学传感单元(40)安置于三维移动和位置数据输出平台(25)的光学传感支撑杆(26)上,三维移动和位置数据输出平台(25)由光学传感支撑杆(26)、X轴导轨(27)、X轴电动移动和位置数据输出模块(28)、Y轴导轨(29)、Y轴电动移动和位置数据输出模块(30)、Z轴导轨(31)和Z轴电动移动和位置数据输出模块(32)组合而成,其中X轴导轨(27)和X轴电动移动和位置数据输出模块(28)安置于Y轴导轨(29)和Y轴电动移动和位置数据输出模块(30)之上,Z轴导轨(31)和Z轴电动移动和位置数据输出模块(32)安置于X轴导轨(27)和X轴电动移动和位置数据输出模块(28)之上,零电场屏蔽空腔(41)安装于空腔支撑座(42)上,零电场屏蔽空腔(41)安置于被测磁场的外部边缘处,三维移动和位置数据输出平台(25)通过传输电缆与位置数据处理单元(34)连接,位置数据处理单元(34)通过USB接口与工业控制机计算机(35)连接,三维电场矩阵通道光学传感单元(40)的输入接口通过光纤(33)与智能调制矩阵功率光源(14)连接,三维电场矩阵通道光学传感单元(40)的输出接口通过光纤(33)与三维电磁场光学信息单元(15)连接,三维电磁场光学信息单元(15)通过USB接口与工业控制机计算机(35)连接。
说明书
技术领域
本实用新型属于空间电磁场检测技术领域,尤其是涉及一种三维光学通道电磁场移动扫描测量系统。
背景技术
电力系统的安全生产关乎到国家的经济建设和国家安全,而电力系统的生产安全决定于电气设备的运行状况。通过电磁场三维移动扫描能够对电气设备故障电流和电压所形成的空间电磁场进行检测,获得电气设备的故障特征信息,从而判断出电气设备的故障位置和故障类型。在电气设备故障检测技术中,准确获得电流和电压所形成的空间电磁场信息,是故障定位的核心技术之一。现有的空间电磁场检测技术是,通过空心线圈感应出空间磁场信号,将信号输入到一个滤波器中,然后通过模拟电路进行信号幅度的检测,然后显示到数码管或者液晶显示器上。2013年7月10日中国专利局公开了申请号为ZL201110413005.3名称为“一种数字锁定型空间磁场检测系统”的发明专利说明书。其技术方案公开了一种数字信号锁定型空间磁场检测系统,该系统由空心线圈、空间磁场信号预制单元、预制信号发生器、数字锁定信号处理单元组成,空心线圈将磁场信号转换为电压信号后,传输到空间磁场信号预制单元,空间磁场信号预制单元将信号传输到数字锁定信号处理单元,数字锁定信号处理单元根据信号特征实时调整空间磁场信号预制单元和预制信号发生器,构成信号闭环反馈结构,数字锁定信号处理单元接收并对空间磁场信号和预制信号进行计算,在液晶显示器上显示,同时驱动数字/模拟转换器,实时输出与空间磁场信号成比例的模拟电压信号。但是该发明还有不足之处,表现在于:(1)该方法只能测量一维磁场;(2)磁场测量值是对于穿过空心线圈空间磁场的面积分,无法实现对微小点的磁场和电场测量;(3)无法实现三维电磁场的重现。
实用新型内容
为了解决目前空间电磁场检测技术只能测量一维磁场,无法实现对微小点的磁场和电场测量以及无法实现三维电磁场重现的不足,本实用新型提出了一种三维光学通道电磁场移动扫描测量系统,包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统,其特征在于,三维光学矩阵通道磁场移动扫描测量系统为三维磁场矩阵通道光学传感单元23安置于三维移动和位置数据输出平台25的光学传感支撑杆26上,三维移动和位置数据输出平台25由光学传感支撑杆26、X轴导轨27、X轴电动移动和位置数据输出模块28、Y轴导轨29、Y轴电动移动和位置数据输出模块30、Z轴导轨31和Z轴电动移动和位置数据输出模块32组合而成,其中X轴导轨27和X轴电动移动和位置数据输出模块28安置于Y轴导轨29和Y轴电动移动和位置数据输出模块30之上,Z轴导轨31和Z轴电动移动和位置数据输出模块32安置于X轴导轨27和X轴电动移动和位置数据输出模块28之上,零磁场屏蔽空腔24安装于空腔支撑座42上,零磁场屏蔽空腔24安置于被测磁场的外部边缘处,三维移动和位置数据输出平台25通过传输电缆与位置数据处理单元34连接,位置数据处理单元34通过USB接口与工业控制机计算机35连接,三维磁场矩阵通道光学传感单元23的输入接口通过光纤33与智能调制矩阵功率光源14连接,三维磁场矩阵通道光学传感单元23的输出接口通过光纤33与三维电磁场光学信息单元15连接,三维电磁场光学信息单元15通过USB接口与工业控制机计算机35连接。
一种三维光学通道电磁场移动扫描测量系统,包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统,其特征在于,三维光学单通道磁场移动扫描测量系统为三维磁场单通道光学传感单元16安置于三维移动和位置数据输出平台25的光学传感支撑杆26上,三维移动和位置数据输出平台25由光学传感支撑杆26、X轴导轨27、X轴电动移动和位置数据输出模块28、Y轴导轨29、Y轴电动移动和位置数据输出模块30、Z轴导轨31和Z轴电动移动和位置数据输出模块32组合而成,其中X轴导轨27和X轴电动移动和位置数据输出模块28安置于Y轴导轨29和Y轴电动移动和位置数据输出模块30之上,Z轴导轨31和Z轴电动移动和位置数据输出模块32安置于X轴导轨27和X轴电动移动和位置数据输出模块28之上,零磁场屏蔽空腔24安装于空腔支撑座42上,零磁场屏蔽空腔24安置于被测磁场的外部边缘处,三维移动和位置数据输出平台25通过传输电缆与位置数据处理单元34连接,位置数据处理单元34通过USB接口与工业控制机计算机35连接,三维磁场单通道光学传感单元16的输入接口通过光纤33与智能调制矩阵功率光源14连接,三维磁场单通道光学传感单元16的输出接口通过光纤33与三维电磁场光学信息单元15连接,三维电磁场光学信息单元15通过USB接口与工业控制机计算机35连接。
一种三维光学通道电磁场移动扫描测量系统,包括三维光学矩阵通道磁场移动扫描测量系统、三维光学单通道磁场移动扫描测量系统、三维光学矩阵通道电场移动扫描测量系统,其特征在于,三维光学矩阵通道电场移动扫描测量系统为三维电场矩阵通道光学传感单元40安置于三维移动和位置数据输出平台25的光学传感支撑杆26上,三维移动和位置数据输出平台25由光学传感支撑杆26、X轴导轨27、X轴电动移动和位置数据输出模块28、Y轴导轨29、Y轴电动移动和位置数据输出模块30、Z轴导轨31和Z轴电动移动和位置数据输出模块32组合而成,其中X轴导轨27和X轴电动移动和位置数据输出模块28安置于Y轴导轨29和Y轴电动移动和位置数据输出模块30之上,Z轴导轨31和Z轴电动移动和位置数据输出模块32安置于X轴导轨27和X轴电动移动和位置数据输出模块28之上,零电场屏蔽空腔41安装于空腔支撑座42上,零电场屏蔽空腔41安置于被测磁场的外部边缘处,三维移动和位置数据输出平台25通过传输电缆与位置数据处理单元34连接,位置数据处理单元34通过USB接口与工业控制机计算机35连接,三维电场矩阵通道光学传感单元40的输入接口通过光纤33与智能调制矩阵功率光源14连接,三维电场矩阵通道光学传感单元40的输出接口通过光纤33与三维电磁场光学信息单元15连接,三维电磁场光学信息单元15通过USB接口与工业控制机计算机35连接。
本实用新型的有益效果在于,提出一种三维光学通道电磁场移动扫描测量系统,采用三维磁光效应和三维电光效应,能够在三维上同时测量空间磁场和电场;实现了空间电磁场的三维重现;采用完全的光学元件和光学传感材料,对于空间电场和磁场不产生扰动,测量得到的数据是完全真实的;能够测量微小点的磁场和电场。
附图说明
图1为三维光学矩阵通道磁场移动扫描测量系统结构图;
图2为三维光学矩阵通道磁场测量结构图;
图3为三维光学矩阵通道磁场测量结构正视图;
图4为三维光学矩阵通道磁场测量结构俯视图;
图5为三维光学矩阵通道磁场测量结构侧视图;
图6为三维光学单通道磁场移动扫描测量系统的结构图;
图7为三维光学单通道磁场测量结构图;
图8为三维光学单通道磁场测量结构正视图;
图9为三维光学单通道磁场测量结构俯视图;
图10为三维光学单通道磁场测量结构侧视图;
图11为三维光学矩阵通道电场移动扫描测量系统结构图;
图12为三维光学矩阵通道电场测量结构图;
图13为智能调制矩阵功率光源的原理图;
图14为三维磁场光学信息处理单元的原理图。
图中标号:
1-X轴向起偏器、2-X轴向检偏器、3-Y轴向起偏器、4-Y轴向检偏器、5-Z轴向起偏器、6-Z轴向检偏器、7-磁光传感立方体、8-X轴向单通道输入准直器、9-X轴向单通道输出准直器、10-Y轴向单通道输入准直器、11-Y轴向单通道输出准直器、12-Z轴向单通道输入准直器、13-Z轴向单通道输出准直器、14-智能调制矩阵功率光源、15-三维电磁场光学信息处理单元、16-三维磁场单通道光学传感单元、17-X轴向矩阵通道输入准直器、18-X轴向矩阵通道输出准直器、19-Y轴向矩阵通道输入准直器、20-Y轴向矩阵通道输出准直器、21-Z轴向矩阵通道输入准直器、22-Z轴向矩阵通道输出准直器、23-三维磁场矩阵通道光学传感单元、24-零磁场屏蔽空腔、25-三维移动和位置数据输出平台、26-光学传感支撑杆、27-X轴导轨、28-X轴电动移动和位置数据输出模块、29-Y轴导轨、30-Y轴电动移动和位置数据输出模块、31-Z轴导轨、32-Z轴电动移动和位置数据输出模块、33-光纤、34-位置数据处理单元、35-工业控制计算机、36-电光传感立方体、37-X轴向四分之一波片、38-Y轴向四分之一波片、39-Z轴向四分之一波片、40-三维电场矩阵通道光学传感单元、41-零电场屏蔽空腔、42-空腔支撑座。
具体实施方式
本实用新型提出一种三维光学通道电磁场移动扫描测量系统,下面结合附图和具体实施例对本实用新型作详细说明。
图1所示为三维光学矩阵通道磁场移动扫描测量系统结构图,三维光学矩阵通道磁场移动扫描测量系统包括带有空腔支撑座42的零磁场屏蔽空腔24、三维磁场矩阵通道光学传感单元23、三维移动和位置数据输出平台25、智能调制矩阵功率光源14、三维电磁场光学信息处理单元15和工业控制计算机35;智能调制矩阵功率光源14通过光纤束与安置于三维移动和位置数据输出平台25中的光学传感支撑杆26上的三维磁场矩阵通道光学传感单元23连接,发送给三维磁场矩阵通道光学传感单元23恒定的光,三维磁场矩阵通道光学传感单元23输出的光信号通过光纤束与三维电磁场光学信息处理单元15相连接,三维电磁场光学信息处理单元15接收三维磁场矩阵通道光学传感单元23输出的带有三维磁场信息的光信号,将光信号转换为相应的电信号后转变为数字量,通过USB连接线将数字量传输给工业控制计算机35进行记录和计算。工业控制计算机35通过位置数据处理单元34控制三维移动和位置数据输出平台25完成空间三维的移动和定位,并记录相应的位置信息。将放置了三维磁场矩阵通道光学传感单元23的三维移动和位置数据输出平台25整体移动,使得三维磁场矩阵通道光学传感单元23中的磁光传感立方体7的右下角与被测磁场的原点重合;将零磁场屏蔽空腔24置于空腔支撑座42上,调节空腔支撑座42的位置和高度使得零磁场屏蔽空腔24套在三维磁场矩阵通道光学传感单元23上,且与三维磁场矩阵通道光学传感单元23不接触,零磁场屏蔽空腔24的位置在被测磁场之外,零磁场屏蔽空腔24的空腔口边缘与被测磁场边界重合;打开智能调制矩阵功率光源14,静置一段时间后进行数据调零。工业控制计算机35通过位置数据处理单元34控制三维移动和位置数据输出平台25分别沿着X轴导轨27、Y轴导轨29和Z轴导轨31以速度vX(单位为每秒1微米)匀速移动,工业控制计算机35控制三维电磁场光学信息处理单元15等时间间隔记录三维磁场矩阵通道光学传感单元23所传感的三维磁场信息,同时通过控制位置数据处理单元34记录位置数据。当三维磁场矩阵通道光学传感单元23完成磁场扫描后停止移动和数据采集,在工业控制计算机35将三维磁场信息数据与位置数据对应,得到磁场三维测量信息。
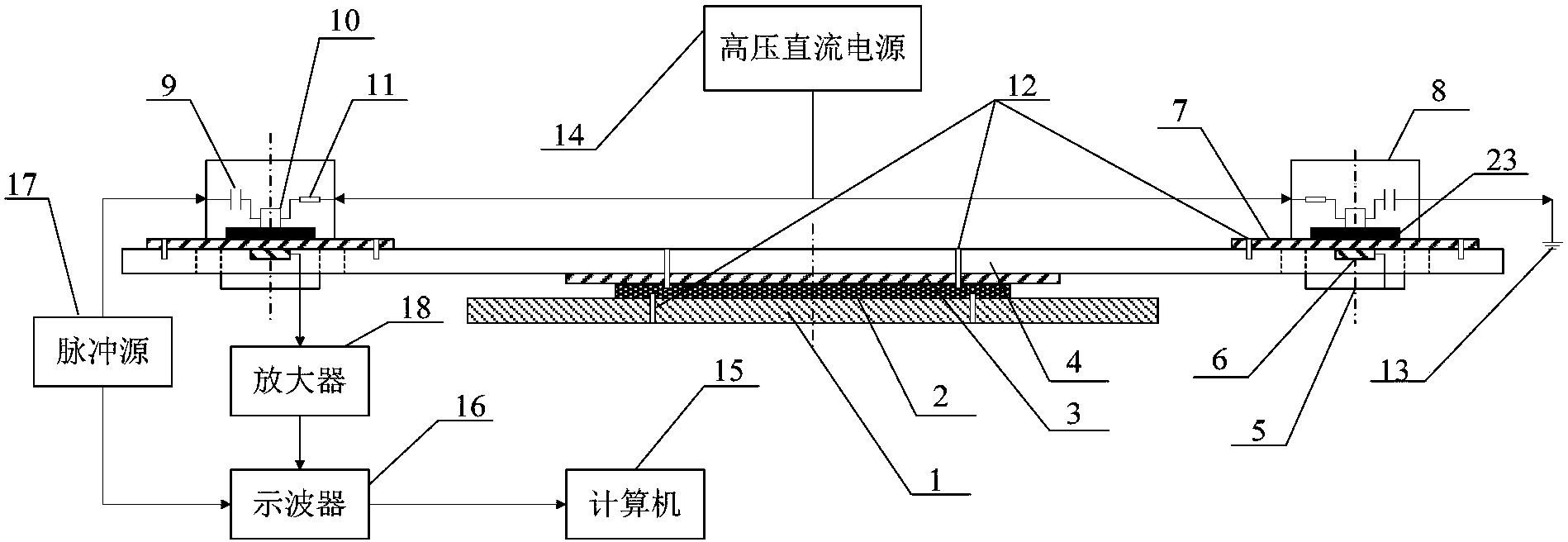
图2所示为三维光学矩阵通道磁场测量结构图,智能调制功率光源14通过一束光纤束将光强基本相同的光发送到X轴向矩阵通道输入准直器17、Y轴向矩阵通道输入准直器19和Z轴向矩阵通道输入准直器21,光束分别在X轴、Y轴和Z轴方向依次通过X轴向起偏器1、Y轴向起偏器3和Z轴向起偏器5后分别在在X轴、Y轴和Z轴方向通过磁光传感立方体7,再经过X轴向检偏器2、Y轴向检偏器4和Z轴向检偏器6通过X轴向矩阵通道输出准直器18、Y轴向矩阵通道输出准直器20和Z轴向矩阵通道输出准直器22,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
其中,X轴向矩阵通道输入准直器17、Y轴向矩阵通道输入准直器19和Z轴向矩阵通道输入准直器21以及X轴向矩阵通道输出准直器18、Y轴向矩阵通道输出准直器20和Z轴向矩阵通道输出准直器22都是由N×N或者N×M个准直器以矩阵方式排列组成的准直器组,N×N或者N×M个准直器之间的相对位置固定,各个准直器的出光端面处于同一个平面内,各个准直器的轴线相互平行;N×N或者N×M个准直器中任意两个相邻准直器轴线的距离相等;X轴向矩阵通道输入准直器17中的各个准直器与X轴向矩阵通道输出准直器18中对应的各个准直器的中心轴线处于同一条直线上,Y轴向矩阵通道输入准直器19中的各个准直器与Y轴向矩阵通道输出准直器20中对应的各个准直器的中心轴线处于同一条直线上,Z轴向矩阵通道输入准直器21中的各个准直器与Z轴向矩阵通道输出准直器22中对应的各个准直器的中心轴线处于同一条直线上。
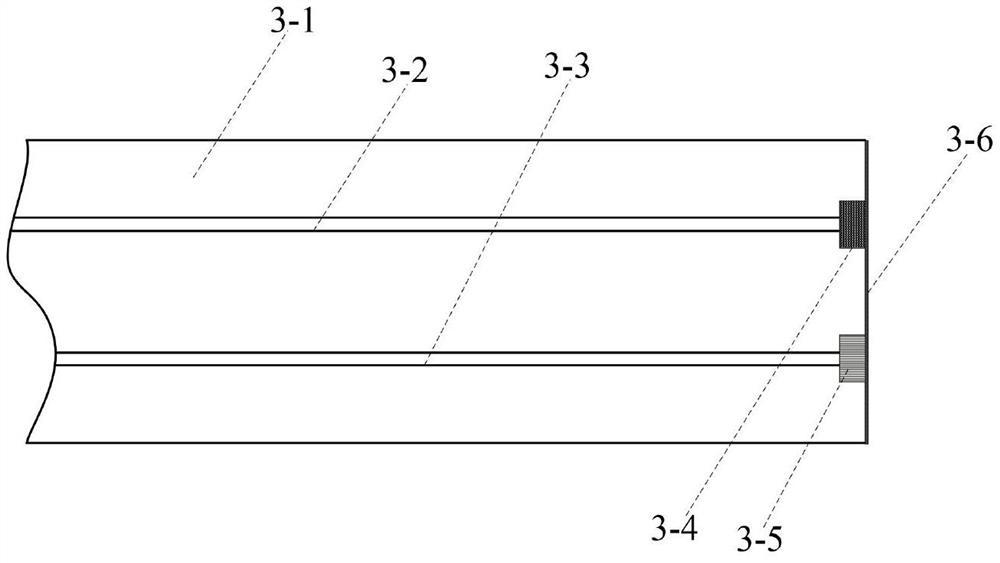
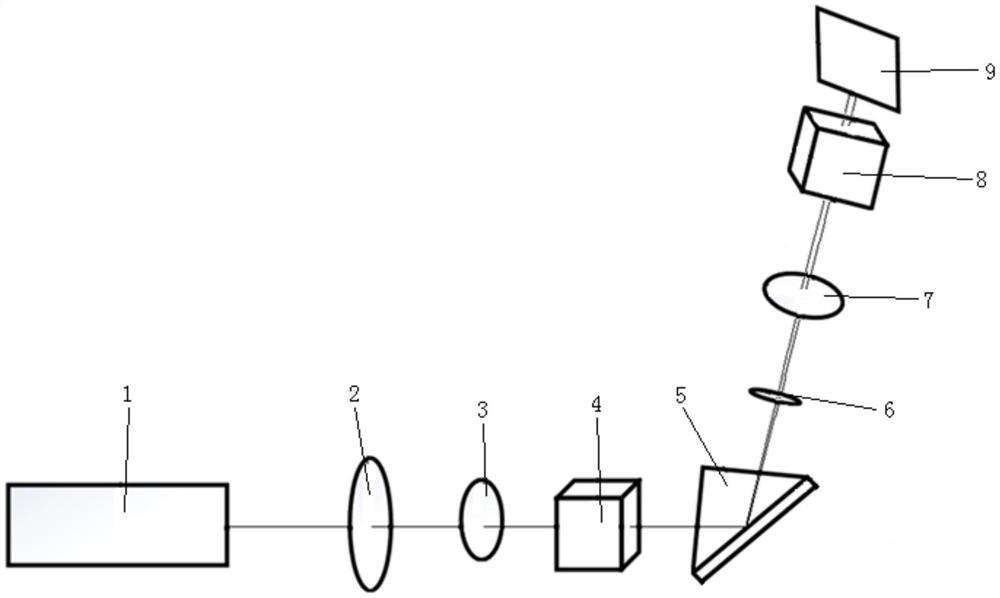
图3所示为三维光学矩阵通道磁场测量结构正视图,智能调制功率光源14通过一束光纤束将光强基本相同的光发送到X轴向矩阵通道输入准直器17,光束在X轴通过X轴向起偏器1后在X轴方向通过磁光传感立方体7,经过X轴向检偏器2通过X轴向矩阵通道输出准直器18,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图4所示为三维光学矩阵通道磁场测量结构俯视图,智能调制功率光源14通过一束光纤束将光强基本相同的光发送到Y轴向矩阵通道输入准直器19,光束在Y轴方向通过Y轴向起偏器3后在Y轴方向通过磁光传感立方体7,经过Y轴向检偏器4通过Y轴向矩阵通道输出准直器20,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图5所示为三维光学矩阵通道磁场测量结构侧视图,智能调制功率光源14通过一束光纤束将光强基本相同的光发送到Z轴向矩阵通道输入准直器21,光束Z轴方向通过Z轴向起偏器5后在Z轴方向通过磁光传感立方体7,经过Z轴向检偏器6通过Z轴向矩阵通道输出准直器22,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图6所示为三维光学单通道磁场移动扫描测量系统的结构图,三维光学单通道磁场移动扫描测量系统包括带有空腔支撑座42的零磁场屏蔽空腔24、三维磁场单通道光学传感单元16、三维移动和位置数据输出平台25、智能调制矩阵功率光源14、三维电磁场光学信息处理单元15和工业控制计算机35;智能调制矩阵功率光源14通过光纤束与安置于三维移动和位置数据输出平台25中的光学传感支撑杆26上的三维磁场单通道光学传感单元16连接,发送给三维磁场单通道光学传感单元16恒定的光,三维磁场单通道光学传感单元16输出的光信号通过光纤束与三维电磁场光学信息处理单元15相连接,三维电磁场光学信息处理单元15接收三维磁场单通道光学传感单元16输出的带有三维磁场信息的光信号,将光信号转换为相应的电信号后转变为数字量,通过USB连接线将数字量传输给工业控制计算机35进行记录和计算。工业控制计算机35通过位置数据处理单元34控制三维移动和位置数据输出平台25完成空间三维的移动和定位,并记录相应的位置信息。将放置了三维磁场单通道光学传感单元16的三维移动和位置数据输出平台25整体移动,使得三维磁场单通道光学传感单元16中的磁光传感立方体7的右下角与被测磁场的原点重合;将零磁场屏蔽空腔24置于空腔支撑座42上,调节空腔支撑座42的位置和高度使得零磁场屏蔽空腔24套在三维磁场单通道光学传感单元16上,且与三维磁场单通道光学传感单元16不接触,零磁场屏蔽空腔24的位置在被测磁场之外,零磁场屏蔽空腔24的空腔口边缘与被测磁场边界重合;打开智能调制矩阵功率光源14,静置一段时间后进行数据调零。工业控制计算机35通过位置数据处理单元34控制三维移动和位置数据输出平台25分别沿着X轴导轨27、Y轴导轨29和Z轴导轨31以速度vX(单位为每秒1微米)匀速移动,工业控制计算机35控制三维电磁场光学信息处理单元15等时间间隔记录三维磁场单通道光学传感单元16所传感的三维磁场信息,同时通过控制位置数据处理单元34记录位置数据。当三维磁场单通道光学传感单元16完成磁场扫描后停止移动和数据采集,在工业控制计算机35将三维磁场信息数据与位置数据对应,得到磁场场三维测量信息。
图7所示为三维光学单通道磁场测量结构图,智能调制功率光源14通过一束光纤束将光强基本相同的光发送到X轴向单通道输入准直器8、Y轴向单通道输入准直器10和Z轴向单通道输入准直器12,光束分别在X轴、Y轴和Z轴方向依次通过X轴向起偏器1、Y轴向起偏器3和Z轴向起偏器5后分别在在X轴、Y轴和Z轴方向通过磁光传感立方体7,再经过X轴向检偏器2、Y轴向检偏器4和Z轴向检偏器6通过X轴向单通道输出准直器9、Y轴向单通道输出准直器11和Z轴向单通道输出准直器13,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
其中,X轴向单通道输入准直器8与X轴向单通道输出准直器9的中心轴线处于同一条直线上,Y轴向单通道输入准直器10与Y轴向单通道输出准直器11的中心轴线处于同一条直线上,Z轴向单通道输入准直器12与Z轴向单通道输出准直器13的中心轴线处于同一条直线上;这三条轴线在空间有一个共同的交汇点。
图8所示为三维光学单通道磁场测量结构正视图,智能调制功率光源14通过一束光纤将光发送到X轴向单通道输入准直器8,光束在X轴方向通过X轴向起偏器1后在X轴方向通过磁光传感立方体7,经过X轴向检偏器2通过X轴向单通道输出准直器9,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图9所示为三维光学单通道磁场测量结构俯视图,智能调制功率光源14通过一束光纤将光发送到Y轴向单通道输入准直器10,光束在Y轴方向通过Y轴向起偏器3后在Y轴方向通过磁光传感立方体7,经过Y轴向检偏器4通过Y轴向单通道输出准直器11,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图10所示为三维光学单通道磁场测量结构侧视图,智能调制功率光源14通过一束光纤将光发送到Z轴向单通道输入准直器12,光束在Z轴方向通过Z轴向起偏器5后在Z轴方向通过磁光传感立方体7,经过Z轴向检偏器6通过Z轴向单通道输出准直器13,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图11所示为三维光学矩阵通道电场移动扫描测量系统结构图,三维光学矩阵通道电场移动扫描测量系统包括带有空腔支撑座42的零电场屏蔽空腔41、三维电场矩阵通道光学传感单元40、三维移动和位置数据输出平台25、智能调制矩阵功率光源14、三维电磁场光学信息处理单元15和工业控制计算机35;智能调制矩阵功率光源14通过光纤束与安置于三维移动和位置数据输出平台25中的光学传感支撑杆26上的三维电场矩阵通道光学传感单元40连接,发送给三维电场矩阵通道光学传感单元40恒定的光,三维电场矩阵通道光学传感单元40输出的光信号通过光纤束与三维电磁场光学信息处理单元15相连接,三维电磁场光学信息处理单元15接收三维电场矩阵通道光学传感单元40输出的带有三维电场信息的光信号,将光信号转换为相应的电信号后转变为数字量,通过USB连接线将数字量传输给工业控制计算机35进行记录和计算。工业控制计算机35通过位置数据处理单元34控制三维移动和位置数据输出平台25完成空间三维的移动和定位,并记录相应的位置信息。将放置了三维电场矩阵通道光学传感单元40的三维移动和位置数据输出平台25整体移动,使得三维电场矩阵通道光学传感单元40中的电光传感立方体36的右下角与被测磁场的原点重合;将零电场屏蔽空腔41置于空腔支撑座42上,调节空腔支撑座42的位置和高度使得零电场屏蔽空腔41套在三维电场矩阵通道光学传感单元40上,且与三维电场矩阵通道光学传感单元40不接触,零电场屏蔽空腔41的位置在被测电场之外,零电场屏蔽空腔41的空腔口边缘与被测磁场边界重合;打开智能调制矩阵功率光源14,静置一段时间后进行数据调零。工业控制计算机35通过位置数据处理单元34控制三维移动和位置数据输出平台25分别沿着X轴导轨27、Y轴导轨29和Z轴导轨31以速度vX(单位为每秒1微米)匀速移动,工业控制计算机35控制三维电磁场光学信息处理单元15等时间间隔记录三维电场矩阵通道光学传感单元40所传感的三维电场信息,同时通过控制位置数据处理单元34记录位置数据。当三维电场矩阵通道光学传感单元40完成电场扫描后停止移动和数据采集,在工业控制计算机35将三维电场信息数据与位置数据对应,得到电场三维测量信息。
图12所示为三维光学矩阵通道电场测量结构图,智能调制功率光源14通过一束光纤束将光强基本相同的光发送到X轴向矩阵通道输入准直器17、Y轴向矩阵通道输入准直器19和Z轴向矩阵通道输入准直器21,光束分别在X轴、Y轴和Z轴方向依次通过X轴向起偏器1、Y轴向起偏器3和Z轴向起偏器5后分别在在X轴、Y轴和Z轴方向通过磁光传感立方体7,再经过X轴向四分之一波片37、Y轴向四分之一波片38和Z轴向四分之一波片39后,经过X轴向检偏器2、Y轴向检偏器4和Z轴向检偏器6通过X轴向矩阵通道输出准直器18、Y轴向矩阵通道输出准直器20和Z轴向矩阵通道输出准直器22,经由光纤束将在三维磁场中感应的光信号输出到三维电磁场光学信息处理单元15。
图13所示为智能调制矩阵功率光源的原理图,单片机8051F310通过P0.4、P0.5和P0.6口与AD9833的FSY、SCLK和SDATA口连接,控制AD9833的状态和输出波形,AD9833的VOUT口输出设定的电压波形,通过由800欧姆电阻和0.1UF、20PF的电容所组成的滤波网络后经过1UF隔直电容后输入经过电阻R102输入到OP07运算放大器的正输入端,AD584输出的恒定电压信号经过电阻R101输出到OP07运算放大器的正输入端。数字电位器U12的电位器跨接在OP07运算放大器的负输入端和输出端之间。数字电位器U12的总线IO口与单片机8051F310的P0.1口相接,接收单片机8051F310的控制命令,调节输出的电位器大小。OP07运算放大器的输出端与功率运放U11的正输入端相连接,功率运放U11的负输入端和输出端分别与三极管U13的基极和发射极相连接,三极管U13的集电极通过电阻R106与电源相连,三极管U13的发射极通过电阻R107与激光二极管D11相连接。激光二极管D11输出的光经过1分32路的微型模块光分路器后均匀分成32路光,其中的一路光经过光纤连接到光电转换器D12上,光电转换器D12输出的电信号经过由OP07和电阻R108、R109和R110所组成的放大器后进入到单片机8051F310的P1.1口,8051F310通过P1.1口接收到光信号,与所设定的光信号相比较后,再通过接口P0.4、P0.5和P0.6以及P0.1口,控制AD9833和数字电位器U12,使得最终从微型模块光分路器输出的光信号达到预定值,从而实现了光源的闭环反馈控制。
图14所示为三维磁场光学信息处理单元的原理图,光信号经过光纤进入到光电转换器D21后转换为电信号,电信号经过由电阻R201、R202和电容C201、C202所组成的滤波网络后经过电阻R203进入到运算放大器U21负输入端,运算放大器U21正输入端通过电阻R204连接到模拟地上,电位器W201跨接在运算放大器U21的负输入端和输出端之间,输出端与由电阻R205、R206和电容C203、C204所组成的滤波网络相串联,滤波网络的输出端通过电阻R207与运算放大器U22负输入端相连,电位器W202跨接在运算放大器U22的负输入端和输出端之间,运算放大器U22的输出端连接到32路模拟量USB数据采集卡NI 6343的输入端上,NI 6343的输出数字量通过USB接口输出。
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权力要求的保护范围为准。
一种三维光学通道电磁场移动扫描测量系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0