








专利摘要
本实用新型公开了一种基于感应耦合通讯的水下时间同步系统,该系统包括包塑钢缆和具有感应耦合功能的水下仪器,水下仪器耦合在包塑钢缆上,在包塑钢缆上设置有浮球组,包塑钢缆的底端通过声学释放器与重力锚相连;所述水下仪器被设置为1台具有发送和接收时间信号功能的主机,以及若干台不具有发送时间信号功能但具有接收时间信号功能的从机。该系统中主机通过感应的方式定期向从机发送一次时间校准信号,从机接收到信号后对内部高精度、低温漂的时钟(如原子钟系统)进行修正,以保证各从机系统内部的守时精度。采用感应耦合通讯系统的仪器不需要电缆通讯,因此该系统布放位置灵活、成本低、海上作业风险小。
权利要求
1.一种基于感应耦合通讯的水下时间同步系统,其特征在于:包括包塑钢缆和具有感应耦合功能的水下仪器,水下仪器耦合在包塑钢缆上,在包塑钢缆上设置有浮球组,包塑钢缆的底端通过声学释放器与重力锚相连;所述水下仪器被设置为1台具有发送和接收时间信号功能的主机,以及若干台不具有发送时间信号功能但具有接收时间信号功能的从机。
2.根据权利要求1所述的一种基于感应耦合通讯的水下时间同步系统,其特征在于:所述主机包括第一实时时钟数据记录器、第一振荡器时钟、第一微处理器和第一感应耦合调节器,第一实时时钟数据记录器与第一振荡器时钟连接,第一振荡器时钟与第一微处理器连接,第一微处理器与第一感应耦合调节器连接,第一感应耦合调节器上配置有第一感应耦合磁环;所述从机包括第二感应耦合调节器、第二微处理器、第二振荡器时钟和第二实时时钟数据记录器,第二感应耦合调节器上配置有第二感应耦合磁环,包塑钢缆从第一感应耦合磁环和第二感应耦合磁环中穿过,第二感应耦合调节器与第二微处理器连接,第二微处理器与第二振荡器时钟连接,第二振荡器时钟连接第二实时时钟数据记录器。
说明书
技术领域
本实用新型涉及一种海洋仪器水下时间校准和同步系统,具体地说是涉及一种基于感应耦合通讯的水下时间同步系统。
背景技术
海洋仪器在水下进行长期定点观测时,无法直接通过GPS或者NTP(Network TimeProtocol)对其内部系统时间进行校准,长期布放在水下会产生较大时间误差。这对需要使用高精准时间参数进行水下观测或声学探测造成了极大的技术瓶颈。例如,传统声学仪器(如水听器)主要通过水下电缆对多个水下仪器进行时间同步,但是水下电缆的使用成本极高,且仪器通过硫化的方式固定在水下电缆上,仪器位置无法调整。
实用新型内容
基于上述技术问题,本实用新型提供一种基于感应耦合通讯的水下时间同步系统。
本实用新型所采用的技术解决方案是:
一种基于感应耦合通讯的水下时间校准系统,包括包塑钢缆和具有感应耦合功能的水下仪器,水下仪器耦合在包塑钢缆上,在包塑钢缆上设置有浮球组,包塑钢缆的底端通过声学释放器与重力锚相连;所述水下仪器被设置为1台具有发送和接收时间信号功能的主机,以及若干台不具有发送时间信号功能但具有接收时间信号功能的从机。
优选的,所述主机包括第一实时时钟数据记录器、第一振荡器时钟、第一微处理器和第一感应耦合调节器,第一实时时钟数据记录器与第一振荡器时钟连接,第一振荡器时钟与第一微处理器连接,第一微处理器与第一感应耦合调节器连接,第一感应耦合调节器上配置有第一感应耦合磁环;所述从机包括第二感应耦合调节器、第二微处理器、第二振荡器时钟和第二实时时钟数据记录器,第二感应耦合调节器上配置有第二感应耦合磁环,包塑钢缆从第一感应耦合磁环和第二感应耦合磁环中穿过,第二感应耦合调节器与第二微处理器连接,第二微处理器与第二振荡器时钟连接,第二振荡器时钟连接第二实时时钟数据记录器。
优选的,所述包塑钢缆在穿过第一感应耦合磁环和第二感应耦合磁环的两端均设置有裸露于海水中的外露端。
优选的,所述水下仪器包括水听器和温盐深仪。
本实用新型的有益技术效果是:
本实用新型提出一种基于感应耦合通讯的水下时间同步系统,该系统中水下仪器耦合在包塑钢缆上,主机通过感应的方式定期向从机发送一次时间校准信号,从机接收到信号后对内部高精度、低温漂的时钟(如原子钟系统)进行修正,以保证各从机系统内部的守时精度。采用感应耦合通讯系统的仪器不需要电缆通讯,因此该系统布放位置灵活、成本低、海上作业风险小。
附图说明
下面结合附图与具体实施方式对本实用新型作进一步说明:
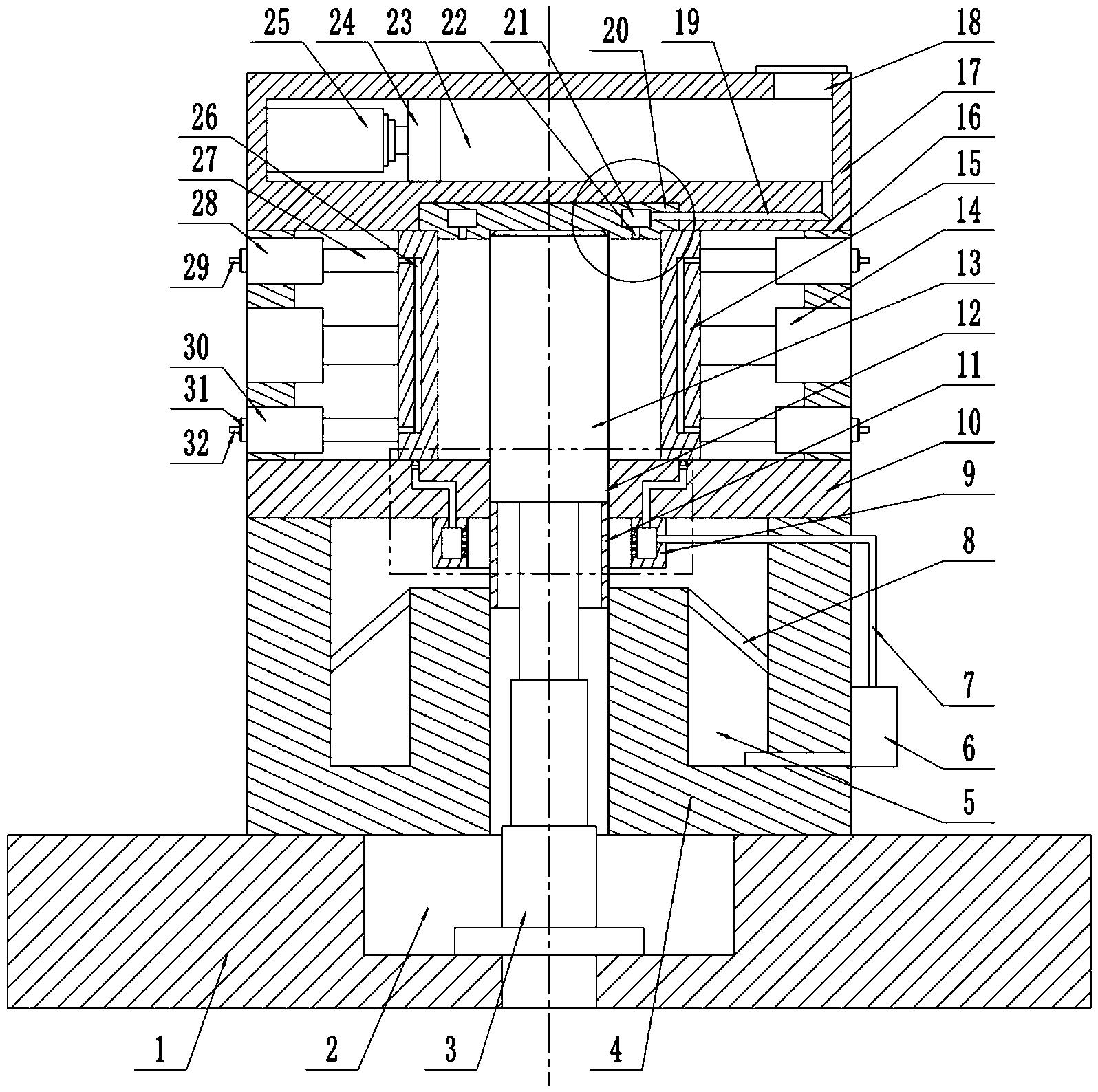
图1为本实用新型基于感应耦合通讯的水下时间同步系统的整体结构示意图;
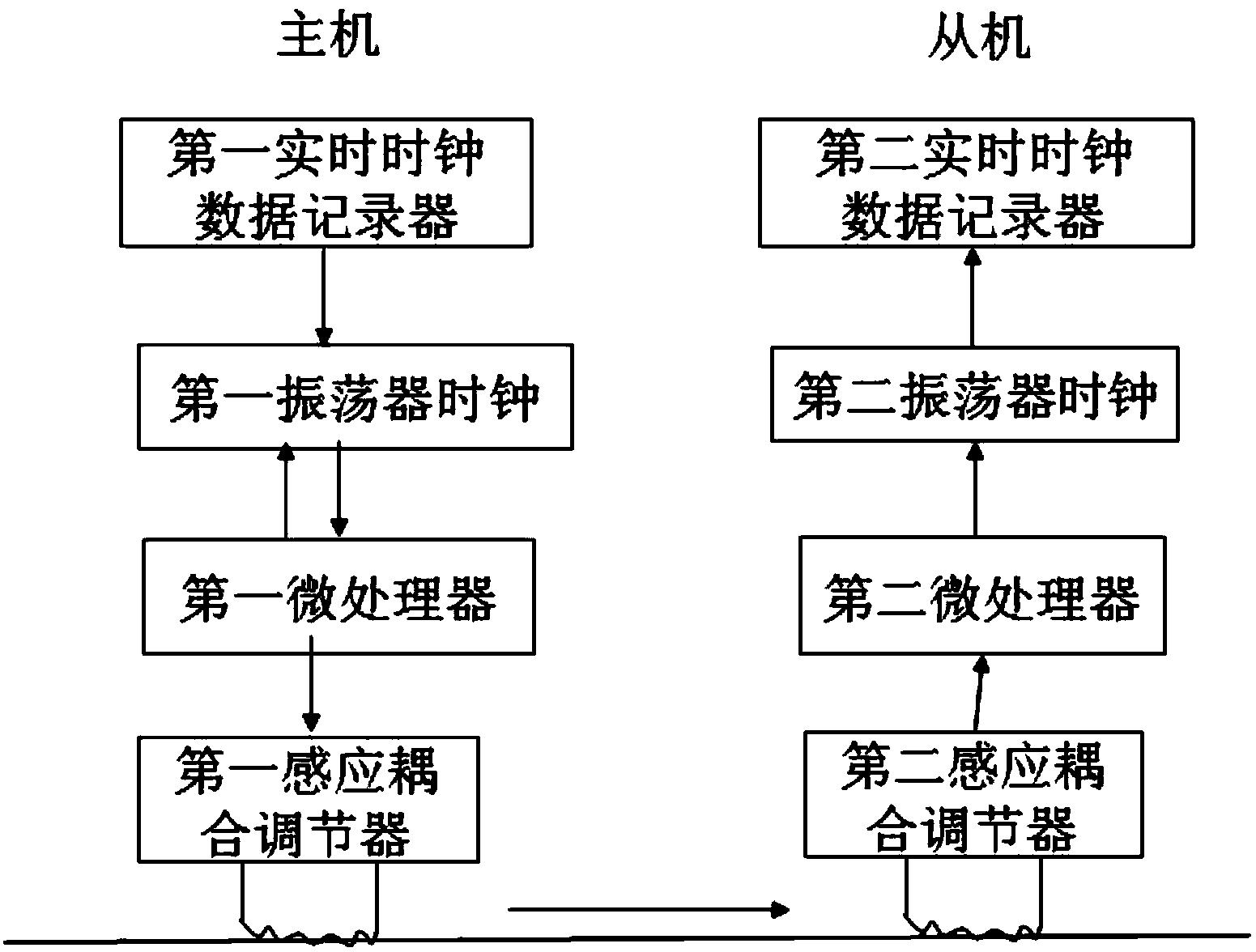
图2为本实用新型系统中主机和从机的结构原理框图;
图3为感应耦合传输电路原理图;
图4为主机至从机的时间校准示意图。
具体实施方式
如图1所示,一种基于感应耦合通讯的水下时间同步系统,包括包塑钢缆1和具有感应耦合功能的水下仪器2,水下仪器2耦合在包塑钢缆1上。在包塑钢缆1上设置有浮球组3,包塑钢缆1的底端通过声学释放器4与重力锚5相连。所述水下仪器2包括水听器和温盐深仪等多种海洋测量仪器。所述水下仪器被分为或设置为1台具有发送和接收时间信号功能的主机,以及若干台不具有发送时间信号功能但具有接收时间信号功能的从机。如可设置水听器为主机,温盐深仪为从机;当然也可设置温盐深仪为主机,水听器为从机。
作为对本实用新型的进一步设计,如图2所示,所述主机包括第一实时时钟数据记录器、第一振荡器时钟、第一微处理器和第一感应耦合调节器,第一实时时钟数据记录器与第一振荡器时钟连接,第一振荡器时钟与第一微处理器连接,第一微处理器与第一感应耦合调节器连接,第一感应耦合调节器上配置有第一感应耦合磁环。所述从机包括第二感应耦合调节器、第二微处理器、第二振荡器时钟和第二实时时钟数据记录器,第二感应耦合调节器上配置有第二感应耦合磁环,包塑钢缆从第一感应耦合磁环和第二感应耦合磁环中穿过,第二感应耦合调节器与第二微处理器连接,第二微处理器与第二振荡器时钟连接,第二振荡器时钟连接第二实时时钟数据记录器。
具体运行时,主机将内部时钟时间传输给第一微处理器,第一微处理器将时间信号传输给第一感应耦合调节器,并通过包塑钢缆感应耦合方式传输到从机。从机接收到信号后,内部第二微处理器利用主机传递的时间信号对从机的时钟进行调整。主机通过接收GPS时间信号进行校准。
本实用新型感应耦合通讯的原理等价于变压器,如图3所示,包塑钢缆穿过主机和从机的磁环,其两端有一小部分裸露在海水中,与海水形成一个闭合回路。主机发送时间信号通过电动势载波加到主机的圆形磁环Tl的初级绕组上,则在包塑钢缆与海水串联构成的回路中感应出电流。电流通过包塑钢缆传输到从机处,从机的圆形磁环T2上的次级绕组感应出电动势E0,E0输送到从机进行解调以获得主机传输的时间信号。
采用上述系统进行水下时间校准和同步的方法,具体步骤如下:
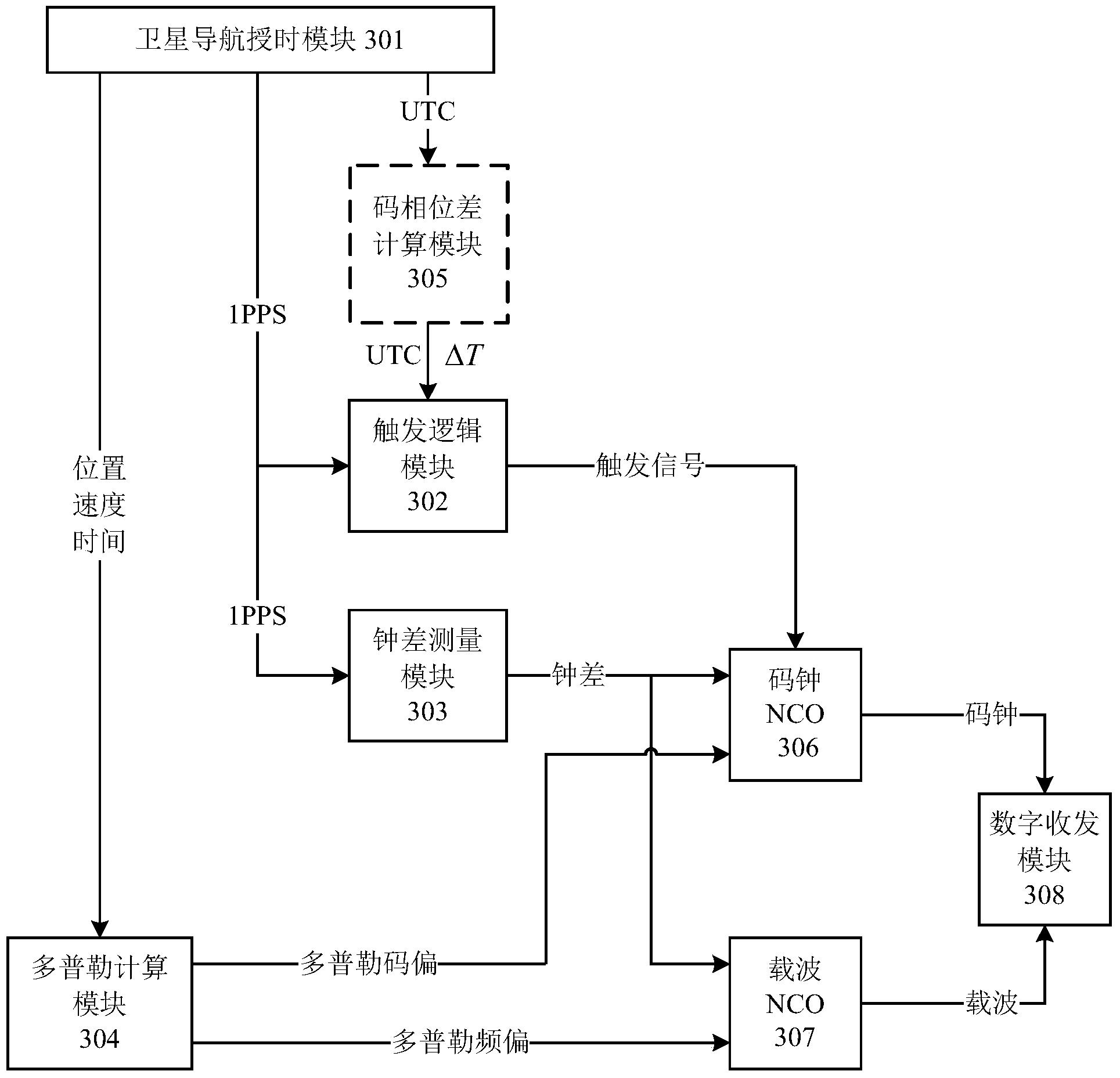
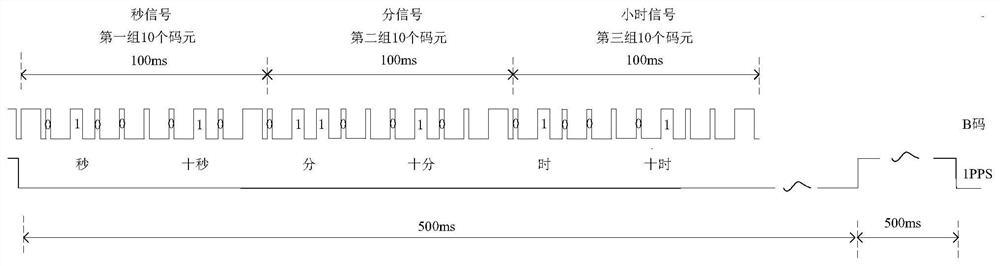
设备在水下无法接收GPS信号,因此在潜标系统入水前,通过GPS时间和1-PPS(Pulse Per Second)信号对所有水下仪器单元的内部电子时钟时间进行对时。1-PPS是指GPS秒脉冲信号,定义脉冲的周期是一秒一次,1-PPS等于1HZ。
当设备入水后,主机每隔24小时向从机发送一次时间校准信号,用于从机时间校准。主机内部的感应耦合调制模块通过包塑钢缆以1s的间隔向从机连续发送一个精确的1-PPS信号序列。由于时间信号在传输过程中会受噪音干扰,为了准确区分有效时间信号和噪音信号,从机自动寻访来自主机的第三个有效的连续信号(如图4中的b)。当信号周期偏离1-PPS信号的0.8%区间(0.992s<ΔT<1.008s),则认为接收到的整个脉冲信号序列是无效信号。当接收到的脉冲信号序列和主机的1-PPS信号序列完全匹配,则认为该信号是有效的时间校准信号。
从机接收到有效的时间校准信号序列后被唤醒,其内部的硬件处理器将产生占空比为50%的1-PPS信号序列。从机采用这些信号对内部的电子时钟进行修正,其内部的数据记录器对修正后的电子时钟的1-PPS信号序列进行计算,将其转化成1s的脉冲计数,并通过这些脉冲计数完成从机对RTC(Real-Time Clock)时间的校准(每128s校准一次)。
主机的脉冲信号发送和被接收需要一定的时间,从而导致从机接收到的脉冲信号有大约140ms±2ms的延迟(如图4中的c)。此外,为了方便从机接收到的脉冲信号序列(如图4中的d)与主机的1-PPS序列信号(如图4中的a)的匹配,可增加860ms的延迟使两个信号间对齐(如图4中的e)。
本实用新型系统的时间误差来源主要有两方面。一方面是当仪器内部的实时时钟数据记录器重启和脉冲计数数据丢失时,水下仪器将以仪器当前的RTC时间为基准,重新计算脉冲计数进行时间校准,导致从机时间与主机时间存在一定的误差。另一方面是仪器内部的数据记录器计算脉冲计数时有时候会出错,导致计算结果不准确。为了解决这些问题,仪器内部的数据记录器会将电子时钟接收到的1-PPS信号转为数字信号模式并存储为文件,方便后期数据处理时,利用该文件进行计算误差修正。
一种基于感应耦合通讯的水下时间同步系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0